
DOI: 10.11817/j.issn.1672-7207.2015.08.017
����Trot��̬����������˵����ȶ���ѧ���������
֣����1, 2��ţ����1, 2������ʥ1, 2������1, 2����ѧ��3
(1. ɽ����ѧ ��е����ѧԺ��ɽ�� ���ϣ�250061��
2. ɽ����ѧ ��Ч�ྻ��е����������ص�ʵ���ң�ɽ�� ���ϣ�250061��
3. ɽ����ѧ ���ƿ�ѧ�빤��ѧԺ��ɽ�� ���ϣ�250061)
ժ Ҫ��
�����н�ʱ��׳���Ի����˱�����ɵ����˲���ǿ�����ȶ��ԣ���ɽ����ѧ���Ƶ�Ұ�������Һѹ�������������Ϊ�о�����������ѧģ�ͣ������������˶�ѧ���з������滮���н���̬���Ա��о���װ������ǰ��Ļ����˵�����λ�ơ����������ٶȼ�ƫת�Ƕȵȣ������Լ�װ�����Ⱥ���ֵ������⣬�Ե�����װ�õ�����ϵ�������Ż����о���������������ȶԼ�С���������ٶȺͿ��ƻ����ȶ��������������á�
�ؼ��ʣ�
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2015)08-2877-07
Dynamic analysis and simulation of spring legs in quadruped robot based on trot gait
ZHENG Jianhua1, 2, NIU Junchuan1, 2, JIANG Minsheng1, 2, LI Meng1, 2, RONG Xuewen3
(1. School of Mechanical Engineering, University of Shandong, Jinan 250061, China;
2. Key Laboratory of High-efficiency and Clean Mechanical Manufacture,
Ministry of Education, Shandong University, Jinan 250061, China;
3. School of Control Science and Engineering, University of Shandong, Jinan 250061, China)
Abstract: In order to reduce the robot��s damage caused by the plantar impact and enhance its walking stability, a high-performance hydraulically driven quadruped robot developed by Shandong University was investigated. Firstly, the model of the quadruped robot was built, and then the forward kinematics, the inverse kinematics and the foot trajectory were presented. Furthermore, variations of the body displacements, shock accelerations and deflection angles of the robot with spring legs and without spring legs were studied comparatively. Finally, the damping coefficient of the spring leg device was optimized to overcome the new resultant problems after installing the spring legs. The results show that the spring legs play a significant role in reducing the robot��s shock and keeping its body stability.
Key words: quadruped robot; spring legs; optimization
�ӻ����˵����������˼����õ������ǵ��ձ����ӣ��ر��ǽ���ʮ�����������˼���Ѹ�ͷ�չ�������˱�Խ��Խ�㷺��Ӧ���ڸ�����������[1]�����⣬������༫�����������������Ի����˵�Ҫ��Ҳ����������Ͽ����������ʽ�����ˣ���ʽ�����˻�����Ӧ�Ը�ǿ���˶�����Ը��ã���������������ۺ���������ʽ����������ã��ܵ��˹�����ѧ�ߵij�����ע[2]������4���ͣ������ƶ���е�Ѿ����֣�֮��ĺܶ�����о�һֱͣ������ƽΡ�20����60����������˿�ʼʹ�û�е��Һѹ���Ƽ��������д����Ե���������Mosher[3]��1968����ƿ��������㲽�л�Walking Truck��Һѹ��������������ڴ�ͳ������������ˣ����и߶�̬�߸��ص����ԣ���������Ұ����ҵ����Ҳʹ��Һѹ������������˳�Ϊ�ڶ���������о����ȵ㡣��ʿ�ٶ���ѧ���̹�˾������Big Dog[4]��������ҵ�����о�Ժ��Rotem��˾���Ƶ�qRT-2[5]�Լ�����������о�Ժ��HyQ���������[6]�����еĴ�����Ұ�������Һѹ������������˾��и߶�̬���߸����������Ȳ��ṹ�����յ��ŵ㡣���������֮�����û����˲��õ��Ǹ����ȣ���˻���������������������ܵ�����ij�����ͻ����ܵ��ij�����ٶȷdz�����ɻ������Ȳ�ĥ��ϴ�����Ӱ������˵�������ͬʱ������ϵͳ�IJ��ȶ��ԣ�ʹ���������Կ��ƣ�����ʱ������������ϵͳ�����ߣ���������صľ�ij��Ҳ������Ȳ��ؽڼ�϶�����ͻ����˵Ŀ��ƾ��ȡ���������ԭ�������߿����ڻ������Ȳ���װ���ɻ���װ�ã��Լ�С��������ͻ����ܵ��ij�������������˿���ϵͳ����֤����ƾ��ȣ��ӳ��������������Լ�װ�����Ⱥ�����˳��ֵ�һЩ�µ��������н�����Ծ������ѭ���Ա�����ƫת�DZ��Ƚ����˷��������Ե����Ȳ����������Ż���
1 �˶�ѧ����
1.1 ���˶�ѧ�����˶�ѧ
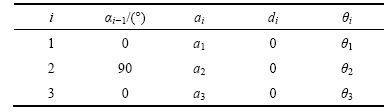
���������ģ����ͼ1��ʾ����Ϊһ�ֶ�֧���˶�������ͬʱ����һ����������ϵͳ���������ؽ���Ϊ12����ԶԶ���ڻ����˻�����˶����ɶ�����������˶�ѧ��Ϊ���ӡ�Ϊ���˶�ѧ���㸴�Ӷ��Ҳ�ʧһ���ԣ�������D-H����ϵ�Ե��Ƚ��з����������˵��ȵ����˲������1��ʾ������ Ϊ��xi���zi��ת��zi+1�ĽǶȣ�aiΪ��xi���zi�ƶ���zi+1�ľ��룻diΪ��zi���xi-1�ƶ���xi�ľ��룻��iΪ��zi���xi-1��ת��xi�ĽǶȡ�
Ϊ��xi���zi��ת��zi+1�ĽǶȣ�aiΪ��xi���zi�ƶ���zi+1�ľ��룻diΪ��zi���xi-1�ƶ���xi�ľ��룻��iΪ��zi���xi-1��ת��xi�ĽǶȡ�
����ͼ1��ʾ����ϵ����1��������д�����ȹؽڵı任����[7]Ϊ
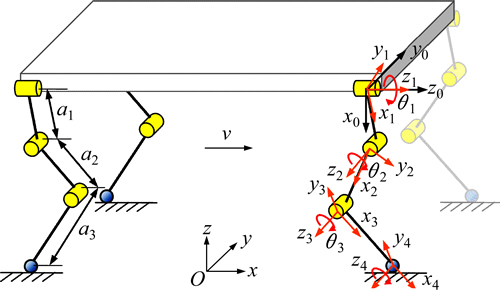
ͼ1 ��������˵�������ϵ��ͼ
Fig. 1 Coordinate system of quadruped robot leg
��1 �����˵������˲���
Table 1 Link parameters of robot leg
ʽ�У� ��
�� ��
�� ��
�� ��
�� ��
��
 ��
�� ��
��
��f����������������ڵĵ㣬�� ��������֪
��������֪ �����������ı任���ɵ�
�����������ı任���ɵ�

���ﲻ���ǻ����˺������߲�̬���� �����ɵ�
�����ɵ� ~
~ ��8��⣬���ݱ���ģ�Ϳ�ȷ�����ľ����Ϊ
��8��⣬���ݱ���ģ�Ϳ�ȷ�����ľ����Ϊ

ʽ�У�
 ��
��
 ��
��
 ��
�� ��
��
1.2 Trot��̬�滮
����ѡ��trot��̬���Ի����˽����о���Ϊ�˷�ֹ��������Ӵ�ʱ����������Ҫ��ڶ��ȵ�̧�Ⱥ���ؼ��ٶȾ�Ϊ0 m/s2��ͬʱΪ�˽��ͻ��������߹������ȵ��ϵ������������ʵ�鼰���ݷ������ó���������켣��������[8-9]��
���������ڿսΣ�


�������ȴ��Σ�


ʽ�У�LΪ������HΪ���ߣ� ��tΪʱ�䣻TΪ���ڡ�
��tΪʱ�䣻TΪ���ڡ�
�ڻ�����ʵ��Trot��̬�£��Խǵ�����켣��ͬ��ͬ�������ڵ���֮����켣���һ�����ڡ���ʼ����״̬�£�ÿ���ȵ�������Ų��·���ͬλ�ã�Ϊ���û�����ƽ������Ҫ��֤���ȶ��ӳ���״̬��ʼ�ڶ������IJ��������ַ����滮���������� ̬[10]���ڿ�ʼ0.25T�ڽ�4���ȵ���������״̬������MATLABģ��������Ȳ����˶��켣��ͼ2(a)��ʾΪ10.25T���Һ��Ⱥ���ǰ�����߹켣��ͼ2(b)��ʾΪ10T������Ⱥ���ǰ�����߹켣��
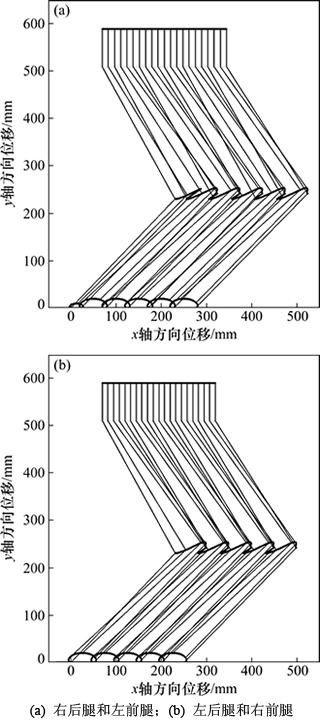
ͼ2 ��̬�滮�켣ͼ
Fig. 2 Foot trajectory
�������˶�ѧʽ(3)�����Եó�������trot��̬���Źؽں�ϥ�ؽڵĽǶȱ仯��ֵ���Ӷ�ͨ�����Źؽں�ϥ�ؽڵĿ������ﵽ���ƻ�����Ŀ�ġ����ʼ2.25T���Źؽڡ�ϥ�ؽڹؽڽǶȱ仯������ͼ3��ʾ��
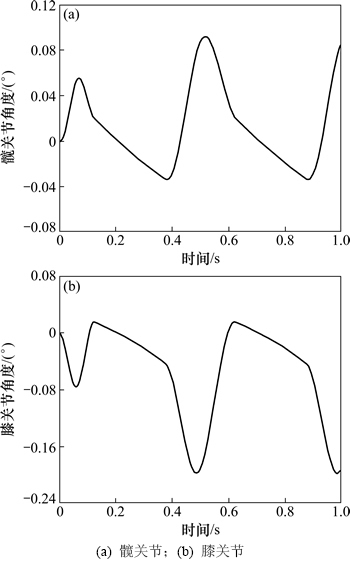
ͼ3 ǰ2.25T�Һ����Źؽں�ϥ�ؽڵĽǶȱ仯����(T=0.5 s)
Fig. 3 Change of hip and knee angle of right hind leg in 2.25T(T=0.5 s)
2 �����˵����ȵĶ���ѧ�������Ż�
2.1 �����˸����ȵĴ��ط���
�����ϽڵIJ�̬�滮���Ը����Ȼ����˽������϶���ѧ���棬�����˸��ؽڰ��չ滮�Ĺ켣���������˶���ǰ���ٶȾ��ȣ��������ĺ���ڶ����Ȳ�����PRY��(�����(Roll)��������(Pitch)��ƫת��(Yaw))��ͼ4��ʾ����ͼ4�ɼ�������RPY�Ƕ���5�����ڣ��������߽�Ϊƽ�ȡ����ǣ���ͼ5���Կ���������������z������ٶȷdz���˵�����Ե���ij��ʮ�ִ����߳����˾��ҵ������
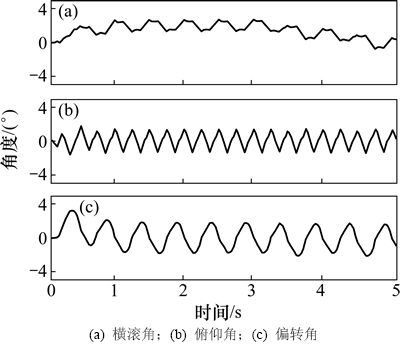
ͼ4 ����RPY�DZ仯����
Fig. 4 RPY angles variations of torso
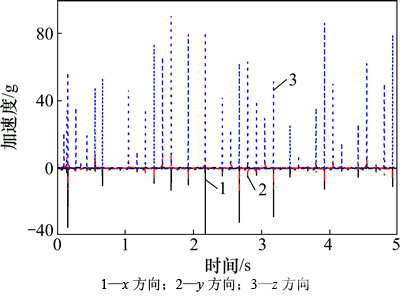
ͼ5 �������ļ��ٶ�����
Fig. 5 Acceleration variations of torso
ͨ��ADAMS���沢���ʵ��ʵ��������������������trot��̬����ʱ�Ƚ�ƽ�ȣ�����ڶ����ȱȽ�С��û�г������ԵĴ������ǻ���������ܵ��������dz����Ҵ��ݵ��˻��塣ʵ��ʵ���У����ڳ��������ʼʱ��װ������ܿ�����˿��ѡ�����ʵ���лὫ����ϵͳ��װ�ڻ����ϣ����������Ч���ƻ����ܵ��ij�����ٶȣ���ô����ij�����ܻ��ϵͳ��ɲ�����ת�����ˣ�Ӱ��ϵͳ�ȶ��ԣ���ˣ��Ȳ���װ�����Ե�ʮ�ֱ�Ҫ��
2.2 �����ȷ���
ͼ6��ʾΪʵ��ʱ���õ�����[11]��������trot��̬������Ļ������ģ����ͼ7��ʾ������ֻ������֧����ʱ�����˵�������z��������������������֧����ʱ������Ϊ�������Ȳ����ؽڽDZ仯��С��������˶���ѧϵͳ�ɼ�Ϊһ�ܵ���б֧��ϵͳ[12]����֧�䷽��Ϊ��


���У�zΪ�����˻���������ƽ��λ�õ�λ�ƣ���ΪС�Ⱥ͵���нǣ�mΪ�����˻���������kΪ���ɸնȣ�cΪ�������l0Ϊ��Ȼ���ɵij��ȣ�l(t)Ϊʵʱ���ȣ� Ϊ���ɾ���������ʽ��Ϊ
Ϊ���ɾ���������ʽ��Ϊ


ȡm=120 kg����=60�㣬l0=120 mm������ɳ�ʼ�����������غ㶨������õ����ɵ���ϵ��ԼΪ 20.516 6 N/mm��Ԥ����Ϊ832.067 N��
�ڻ������Ȳ�����֧����ʱ�����赯���ȵ���������ڻ������Ժ��Բ��ơ����ʱ���ȶԵ����������Ϊ ��Ϊ��ȷ������������֧����ʱ�Ȳ����[13]����
��Ϊ��ȷ������������֧����ʱ�Ȳ����[13]���� ��ʹ
��ʹ kN����ʹ��������������ٶ�Ϊ0.2 m/s����������Եó����ɳ�ʼ����
kN����ʹ��������������ٶ�Ϊ0.2 m/s����������Եó����ɳ�ʼ���� N��s/mm��
N��s/mm��
����������������ĵ����Ȼ����˽��ж���ѧ���档ͼ8��ͼ9��ʾ�ֱ�Ϊ��װ������ǰ�����z�����������ߺͻ���z����ļ��ٶ����ߣ������۷��������ͬ���������ļ��ٶȻ��������õ����������ͣ�������z������Ϊͻ������ֵƽ��ֵ�ֱ�ԼΪ���ӵ���ǰ��1/65��1/25���Ӷ���С�˻����˻����㲿��֮��ij���������ӳ��㲿��ʹ��������������������ϵͳ���ȶ��ԣ�Ϊ���ڵĻ���ϵͳ����춨���õĻ�����

ͼ6 ������
Fig. 6 Spring leg
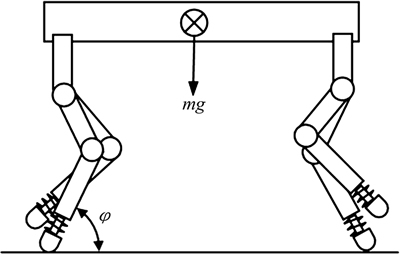
ͼ7 �����ȶ���ѧģ��
Fig. 7 Kinetic model of spring leg
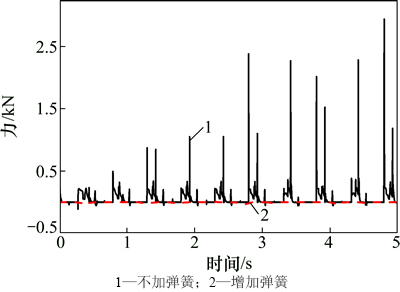
ͼ8 �Һ������z��������ͼ
Fig. 8 Contact forces of right foot along axis z
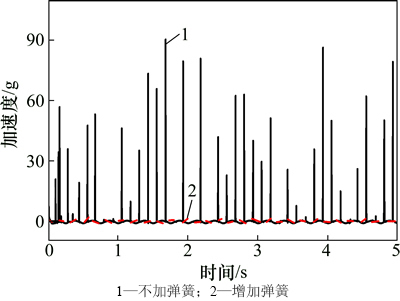
ͼ9 ����z���������ٶ�
Fig. 9 Shock accelerations of torso along axis z
2.3 �����ȵ��Ż�
���ܼ�װ�����Ⱥ����ij�����ٶȴ�ͣ����ǻ������н����Դ���һЩ���⣬���н�����Ծ���ŵ״�ѭ���Ա�����ƫת�DZ���[15-16]������������Ƶ���ʱ���趨�ij�ʼ����������Ǿ���ѧ��ϵ����ˣ�������ȫ����ʵ������ʱ�IJ��������������ʱ��������Ŀ��DZȽ�Ƿȱ��Ϊ�˽���������⣬�б�Ҫ�Ե��ɵ���������Ż��������ۺϿ��ǽ������µ��Ż�������
���У����ͦ�ΪȨ��ϵ��������ʵ�����ѡȡ��az��dy��dz��dM�ֱ�Ϊ�����˻����z����ٶȡ�y��λ�ơ�z��λ�ƺ��ȶ�ԣ��[14]����Ϊ�Ա�������ϵ��c�ĺ�����dy(c)��-10��dz(c)��0Ϊ��ʼ������dM��0Ϊ�ȶ�������
ͨ��ADAMS��Matlab�������Ż����ɵ��Ż������ͼ10��11��ʾ����ͼ10���Կ�����������ϵ����0.67������Ŀ�꺯������ȡ����Сֵ��ͨ����һ������ͷ�����֪������������˵�������ϵ��Ϊ0.673 5 N��s/mm ʱ�����岻���ܵ������С���һ����зdz��õ��ȶ��ԡ��ʽ���������˵��ɻ���װ���ϵĵ�������ϵ����Ϊ0.673 5 N��s/mm��ͼ11��ʾΪ�������ļ��ٶȡ���ͼ11�ɼ��������Ż���������ȶ�����������1�����ں�z����������ֵƽ��ֵ�н����ԵĽ��͡������Ż�ǰ��x��y���������ٶȡ�ǰ���ŹؽڵĹؽ���û�����Եı仯��
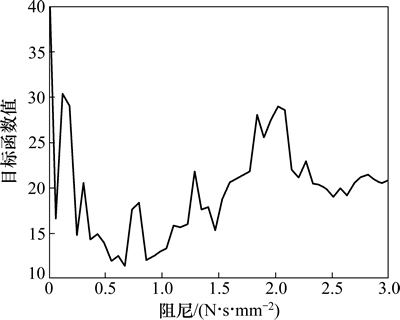
ͼ10 �Ż��������
Fig. 10 Optimization analysis
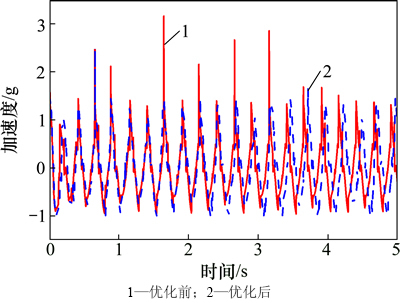
ͼ11 ��������z�������ٶ�
Fig. 11 Shock accelerations of torso along z axis
ͼ12��ʾΪ��װ�����ȼ����Ż�ǰ�����������x�����λ�����ߡ���Ϸ���ʵ����Կ�������û�а�װ������ʱ��������x�����ϴ���ǰ��λ�ƽ�С���������ڻ����ܵ����ҳ���ͽŵ׳��ִ��������𡣰�װ�����ȵ�δ�Ż�֮ǰ��������x����λ����һ���IJ�������ǰ��λ�ƹ������ǻ������н�����Ծ����ġ��Ż������˽ŵ״�������н�����Ծ����õ������Եĸ��ơ�ͼ13��ʾΪ��װ�����ȼ����Ż�ǰ����������y���λ�ơ��Ż����ɺ����˻�������y��ڶ��������õ��ȶ��Ժ������ԣ������ѭ���Ա������⣬�������߶�����ƽ�ȡ������RPY�DZ仯������ͼ14��ʾ����ͼ14�ɼ����������Ǻ�ƫת��Ҳ���Ա�С����ʾ�������õ������ԡ�
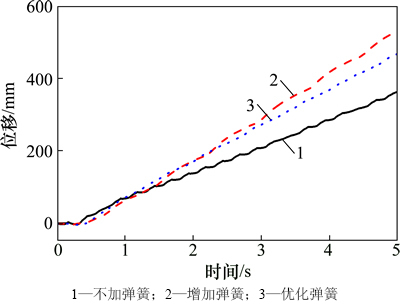
ͼ12 ��������x��λ��
Fig. 12 Position variations of torso along axis x
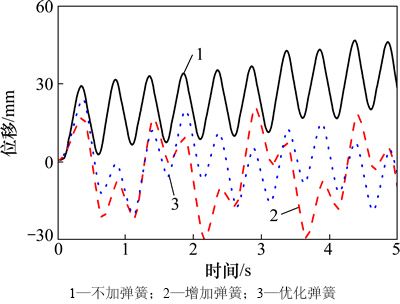
ͼ13 ��������y��λ��
Fig. 13 Position variations of torso along axis y
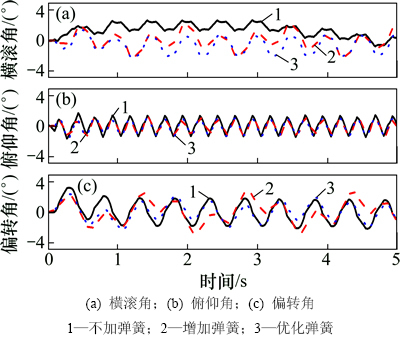
ͼ14 ����RPY�DZ仯����
Fig. 14 RPY angles variations of torso
3 ����
1) Ϊ�˽�������������н�ʱ��׳���Ի����˱�����ɵ����˲���ǿ�����ȶ��ԣ���ɽ����ѧ���Ƶ�Ұ�������Һѹ�������������Ϊ�о��������������˶�ѧ�����˷������滮�����н���̬���Ա��о��˼�װ������ǰ������˵�����λ�ơ����������ٶȼ�ƫת�Ƕȵȡ������Լ�װ�����Ⱥ���ֵ���Ծ��ѭ��������⣬�Ե�����װ�õ�����ϵ���������Ż���
2) ���ӵ����ȶԽ��ͳ��Ч�����ԡ�ͨ����һ���Ե����Ȳ��������Ż����ã������˻��������ߵ�ѭ���Ժ��ȶ��ԣ����������˻�������״��н�����Ծ�����⣬��һ�������˻������ļ��ٶȺ͵���Ի���ij������
�ο����ף�
[1] ������, ������. �����˼������ⷢչս�Ե�����˼��[J]. �й�����ҵ��Ϣ��, 2003(1): 31-36.
WANG Tianmiao, LIU Jinchang. Study on the development strategy of robot technology subject[J]. Manufacture Information Engineering of China, 2003(1): 31-36.
[2] ������, ������, ���, ��. ����������������µ�����������˶�����[J]. ������, 2011, 33(6): 700-705.
ZENG Xiangyu, E Mingcheng, LI Dongdong, et al. Quadruped robot walking control on trench-like noncontiguous terrain[J]. Robot, 2011, 33(6): 700-705.
[3] Mosher R S. Test and evaluation of a versatile walking truck[C]//Proceedings of O-Road Mobility Research Symposium. Washington DC, 1968: 359-379.
[4] Nelson G, Blankespoor K, Raibert M. Walking BigDog: insights and challenges from legged robotics[J]. Journal of Biomechanics, 2006, 39(6): S360.
[5] Kim H K, Won D, Kwon O, et al. Foot trajectory generation of hydraulic quadruped robots on uneven terrain[C]//IFAC 2008, Seoul, Korea, 2008: 3021-3026.
[6] Semini C. HyQ-design and development of a hydraulically actuated quadruped robot[D]. Genva: Italian Institute of Technology, 2010: 5-7.
[7] Craig J J. Introduction to robotics: mechanics and control[M]. 3rd ed. New Jersey: Prentice Hall, 2004: 67-70.
[8] Rong X W, Li Y B, Ruan J H, et al. Design and simulation for a hydraulic actuated quadruped robot[J]. Journal of Mechanical Science and Technology, 2012, 26(4): 1171-1177.
[9] ���ݱ�, ���, ��ѧ��, ��. Һѹ����������������˵Ľṹ��ƺͲ�̬�滮[J]. ɽ����ѧѧ��(��ѧ��), 2011, 41(5): 32-37.
LI Yibin, LI Bin, RONG Xuewen, et al. Mechanical design and gait planning of a hydraulically actuated quadruped bionic robot[J]. Journal of Shandong University (Engineering Science), 2011, 41(5): 32-37.
[10] �ζ���, ����ݥ, ����, ��. ��������˶Խ�С������̬���ȶ����е�Ӱ��[J]. ������, 2004, 26(6): 529-532.
HE Dongqing, MA Peisu, CAO Xi, et al. Impact of initial stance of quadruped trotting on walking stability[J]. Robot, 2004, 26(6): 529-532.
[11] ����. ���ǵ����ȵ���������˶���ѧ���������[D]. ����: ɽ����ѧ��е����ѧԺ, 2012: 20-40.
LI Meng. Dynamic analysis and simulation of quadruped robot with spring legs[D]. Jinan: Shandong University. School of Mechanical Engineering, 2012: 20-40.
[12] Niu J C, Lim C W, Zhu J Q. Active control of flexible vibration systems with inclined combined mounts[J]. Advances in Vibration Engineering, 2011, 10(3): 239-249.
[13] ���S, ��Ȩ. ���ȵ��������˵ij߶�ЧӦ����[J]. ����һ�廯, 2005(5): 29-34.
LIANG Yun, ZHOU Quan. A simulation of scale effects in a simple one leg hopping robot[J]. Mechatronics, 2005(5): 29-34.
[14] ������, �Ʋ�, ������. ��������������ȶ����ж�����[J]. ��������ҵ��ѧѧ��, 2008, 40(7): 1063-1066.
WANG Pengqing, HUANG Bo, SUN Lining. Stability judging method for quadruped bionic robot[J]. Journal of Harbin Institute of Technology, 2008, 40(7): 1063-1066.
[15] ��ѧ��. SCalfҺѹ������������˵Ļ���������˶�����[D]. ����: ɽ����ѧ��е����ѧԺ, 2013: 12-45.
RONG Xuewen. Mechanism design and kinematics analysis of a hydraulically actuated quadruped robot SCalf[D]. Jinan: Shandong University.School of Mechanical Engineering, 2013: 12-45.
[16] л����, �н���, ������, ��. ��������˶Խ�С���л��巭ת��������̬����[J]. ������, 2014, 36(6): 676-682.
XIE Huixiang, SHANG Jianzhong, LUO Zirong, et al. Body rolling analysis and attitude control of a quadruped robot during trotting[J]. Robot, 2014, 36(6): 676-682.
(�༭ �Կ�)
�ո����ڣ�2014-08-12�������ڣ�2014-10-20
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51275275)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2011AA041001)��ɽ��ʡ�����������ѧ�ҿ��н�������������Ŀ(BS2010ZZ006)(Project (51275275) supported by the National Natural Science Foundation of China; Project (2011AA041001) supported by the National High Technology Research Development Program (863 Program) of China; Project (BS2010ZZ006) supported by the Shandong Young Scientists Award Fund)
ͨ�����ߣ�ţ��������ʿ�����ڣ����������������о���E-mail��niujc@sdu.edu.cn
ժҪ��Ϊ�˽�������������н�ʱ��׳���Ի����˱�����ɵ����˲���ǿ�����ȶ��ԣ���ɽ����ѧ���Ƶ�Ұ�������Һѹ�������������Ϊ�о�����������ѧģ�ͣ������������˶�ѧ���з������滮���н���̬���Ա��о���װ������ǰ��Ļ����˵�����λ�ơ����������ٶȼ�ƫת�Ƕȵȣ������Լ�װ�����Ⱥ���ֵ������⣬�Ե�����װ�õ�����ϵ�������Ż����о���������������ȶԼ�С���������ٶȺͿ��ƻ����ȶ��������������á�
[1] ������, ������. �����˼������ⷢչս�Ե�����˼��[J]. �й�����ҵ��Ϣ��, 2003(1): 31-36.
[2] ������, ������, ���, ��. ����������������µ�����������˶�����[J]. ������, 2011, 33(6): 700-705.
[9] ���ݱ�, ���, ��ѧ��, ��. Һѹ����������������˵Ľṹ��ƺͲ�̬�滮[J]. ɽ����ѧѧ��(��ѧ��), 2011, 41(5): 32-37.
[10] �ζ���, ����ݥ, ����, ��. ��������˶Խ�С������̬���ȶ����е�Ӱ��[J]. ������, 2004, 26(6): 529-532.
[11] ����. ���ǵ����ȵ���������˶���ѧ���������[D]. ����: ɽ����ѧ��е����ѧԺ, 2012: 20-40.
[13] ���S, ��Ȩ. ���ȵ��������˵ij߶�ЧӦ����[J]. ����һ�廯, 2005(5): 29-34.
[14] ������, �Ʋ�, ������. ��������������ȶ����ж�����[J]. ��������ҵ��ѧѧ��, 2008, 40(7): 1063-1066.
[15] ��ѧ��. SCalfҺѹ������������˵Ļ���������˶�����[D]. ����: ɽ����ѧ��е����ѧԺ, 2013: 12-45.
[16] л����, �н���, ������, ��. ��������˶Խ�С���л��巭ת��������̬����[J]. ������, 2014, 36(6): 676-682.
