
DOI: 10.11817/j.issn.1672-7207.2017.08.014
�������½ӳ���������ƫ�ö�ת������Ե�Ӱ��
������˾���飬���壬�����������ͻ�
(�����Ƽ���ѧ ��е����ѧԺ��������100083)
ժ Ҫ��
ʽ��ж���Ľṹ�ص㣬���һ�ֿ��dz������������ƫ������µij����˶�ģ�ͣ�ͨ����������̬ת������еĺ�ڽ��ٶ����桢����������Լ�����ת��ϵ����������ڽ��ٶ������ǵ����۹�ϵ������ǰ����������ƫ�öԳ��������ȶ��Ե�Ӱ�졣�о�������������������������֤�Ľ�������Ǻϣ��½�ʽ�����Բ�ͬ������̬ת��ʱ��ڽ��ٶ������dz��ֳ�һ�������߹�ϵ����ǰ����������ƫ�öԳ���ת������еIJ����ȶ������Ų�ͬ��Ӱ����ɣ����о���Ϊ�½�ʽ���������ȶ��Ե��ۺϿ����ṩ���۲ο���
�ؼ��ʣ�
�½�ʽ��������ڽ��ٶ��������������ƫ����
��ͼ����ţ�U461.6 ���ױ�־�룺A ���±�ţ�1672-7207(2017)10-2657-08
Effects of mass offset on steering handing stability for electric-driven articulated truck
HUANG Xiaxu, SI Jixiang, YANG Jue, ZHANG Wenming, SHEN Yanhua
(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)
Abstract: A roll and centroid offset steering kinematics model was presented according to the electric-driven articulated vehicle structural characteristics. The theoretic relationship between the yaw rate and roll angle steady-state value was established and the centroid position offset to the handling stability effects in steering conditions was discussed by calculating the yaw rate gain, roll angle gain and understeer parameter. The results show that analysis and test results are basically consistent when the articulated vehicle is steering at different speeds; the relationship between the yaw rate and roll angle is a complex nonlinear. And the centroid offset has different influence on the articulated vehicle handling stability. It provides a theoretical reference for the integrated control of articulated vehicle handling stability.
Key words: articulated vehicle; yaw rate; roll angle; centroid offset
���Ź��������¶���ɽ��ģ�IJ������½�ʽ�綯����ж����¶���ɽ�������豸�����ž������ص����á��½�ʽ������������ǰ����ͨ���½������ӣ������÷������ͷ����ֱ�Ӵ�����ģʽ������ԭ�еĴ����ṹ[1-5]������[6-7]ͨ���½�ʽ�����Ķ���ѧϵͳ����������˽ṹ�����Գ���ֱ����ʻ�����ȶ��Ե�Ӱ�죻����[8]�Խ½�ʽ��������ѧ�ȶ��Դ��ڵ����⼰�о���״�����˷�����ָ�������õ��ӿ���ϵͳ�Խ½ӳ�����ѧ�ȶ��Խ��п��ƣ�����[9]ͨ������ת�������ͳ�����Ժ�ڽ��ٶ�����Ĵ��ݺ������ܽ��ǰ���岻ͬת��������϶���������̬ת�����Ե�Ӱ�졣�������߽�ϵ������½�ʽ�����Ľṹ�ص㣬��ij��60 t���ֽ½�ʽ�綯����ж��Ϊ�о����������dz������������ƫ������µij����˶�ģ�ͣ�������̬ת������к�ڽ��ٶ������ǵ����۹�ϵ�����о���������ǰ����������ƫ�öԳ���ת������еĺ�ڽ��ٶȡ�����ǺͲ���ת��ϵ����Ӱ�졣�Աȼ�����������������֤ģ��������ȷ����ȷ�ԡ�
1 ����ת���˶�����ѧģ��
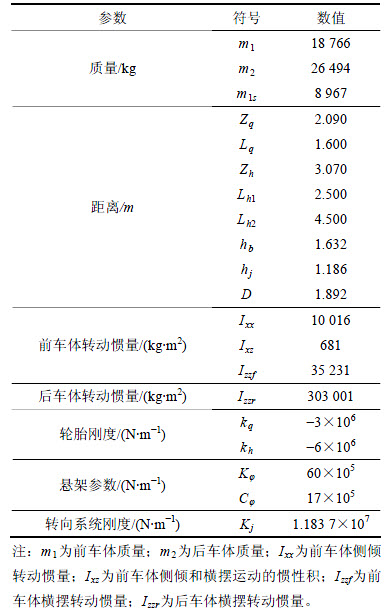
60 t�½�ʽ�綯����ж����ǰ������õ��ݱ�ʽ�����������ܣ�ǰ����IJ�������λ��ǰ��������Գ�ƽ�����ƽ��Ľ����ϡ���������û�����õ�������Ԫ������ˣ������Ǻ�����������IJ����˶���ͼ1��ʾΪ�½�ʽ������ƽ���˶�ģ�͡�ͼ1�У�g1Og2Ϊ�����˶��ľ�������ϵ��a1O1a2Ϊǰ��������λ�ô�������ϵ��b1O2b2Ϊ��������λ�ô�������ϵ��u1��v1��r1Ϊǰ�������������ٶȣ������ٶȺͺ�ڽ��ٶȣ�u2��v2��r2Ϊ�������������ٶȣ������ٶȺͺ�ڽ��ٶȣ�TΪת�����أ�Fx��FyΪ�½ӵ㴦�����������Ϊǰ��������ǣ���Ϊ�½ӳ�����ǣ�Fxi��Fyi�ֱ�Ϊ���ֵ��������Ͳ�������ZqΪǰ�������ľ�½ӵ���룻ZhΪ�������ľ�½ӵ���룻LqΪǰ�ᵽ�½ӵ���룻Lh1Ϊ�м��ֵ��½ӵ�ľ��룻Lh2Ϊ���ֵ��½ӵ�ľ��룻DΪǰ�����־��һ�룻Pq��PhΪǰ��������ƫ�õľ��롣
ͼ2��ʾΪǰ�������ģ�ͣ��涨������ʱ�����ת��ʱ���������ٶ�Ϊ����ͼ2�У�hbΪǰ�������ľ�������ĵľ��룻hjΪ�½ӵ��������ĵľ��룻��Ϊ�����IJ���ǡ�
1.1 ��̥�IJ�ƫ����ת������
�½�ʽ��������������װ������ı仯��ԭ���ʹ����ǰ���������ı�����������ƫ�ã������غ������ҳ����ϵķ��佫�����仯�����ڳ���ת������У�������������ͬ���ᵼ����̥�����غ�ת�ơ�������[10]�ɼ����������30 km/h����Сת��뾶ת�������£����ı���ƫ���������̥�غɱ仯��Ϊ
 (1)
(1)
ʽ�У�m1sΪǰ�������������m1xΪǰ����ǻ���������RΪת��뾶��vΪת���٣���FΪ�غ�ת������h1Ϊ�������ĸ߶ȣ�h2Ϊ�ǻ������������ĸ߶ȣ�K��Ϊ����Ǹն�ϵ����
��ϱ�1�и�������ҵ�о��������Ľṹ������������ɵã����ı���ƫ���������̥�غɱ仯��Ϊ���������µ��غɱ仯��(2 854.3 N)��5�����ϣ�����ת��뾶����������������̥�غɱ仯����Ӱ����С�����ڽ½�ʽ������ת�䳵�ٽϵͣ������ݲ�����������������غ�ת�ơ�
����̥�IJ�ƫ���Կ�֪����̥�IJ�ƫ�ն������Ĵ�ֱ�غ��й�[11-12]��������������δ����ƫ��ʱǰ����̥��ƫ�ն�Ϊkq��������̥��ƫ�ն�Ϊkh����ǰ�������ı�������ƫ��ʱ��ǰ�����ֳе����غ�Ϊԭ�غɵĦ�1����ǰ��������̥��ƫ�նȱ�Ϊ��q1kq��������̥��ƫ�ն�Ϊ��q2kq����ˣ�ǰ����̥�IJ�ƫ��Ϊ
 ��
�� (2)
(2)
ʽ�У���q1�ͦ�q2�ֱ�Ϊǰ��̥�IJࡢƫ�ն�ϵ����
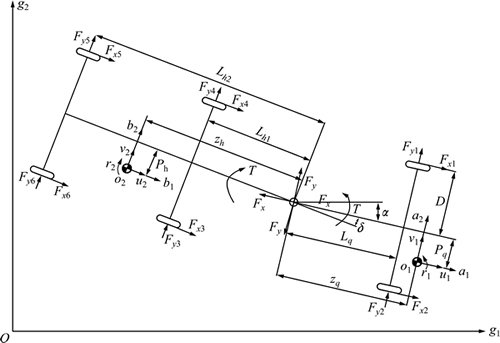
ͼ1 ����ƽ���˶�ģ��
Fig. 1 Yaw plane model of articulated vehicle
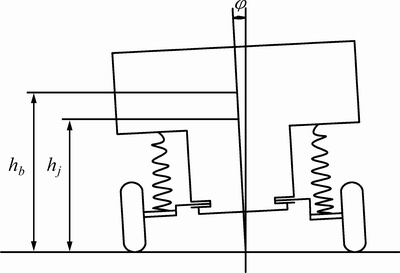
ͼ2 ǰ�������ģ��
Fig. 2 Roll model of front vehicle body
��1 �½ӳ��ṹ����
Table 1 Structure parameters of articulated vehicle
���������ı�������ƫ��ʱ���������ֳе����غ�Ϊԭ�غɵĦ�2��������������̥��ƫ�նȱ�Ϊ��h1kh��������̥��ƫ�ն�Ϊ��h2kh����ˣ�������̥�IJ�ƫ��Ϊ
 ��
�� (3)
(3)
ʽ�У���h1�ͦ�h2�ֱ�Ϊ����̥�IJࡢƫ�ն�ϵ����
Ϊ���о��������м��賵��С�Ƕ�ת������ǰ���������ǽ�С����ˣ���ȡsin��=�ģ�cos��=1������̥�IJ�ƫ�����£�
 (4)
(4)
 (5)
(5)
 (6)
(6)
ʽ�У���iΪ��i����̥�IJ�ƫ�ǡ�
�½�ʽ����ֱ����һ�̶��뾶��������ʻʱ��ת�رգ���ʱҺѹת��ϵͳ�൱��1�������ڽ½ӵ㡢����ǰ�����Ťת����[13-15]���䵱��Ťת���ɸն�Ϊkj����ת�����������ɵ�ǰ�������ת��Ϊ��w��������Һ��ѹ���Ժʹ��������ĵ��Եȣ�����ʵ����ת�Ǧ����w�����С���������ݿ�ѹ�����������������Է��̣���̬ת���ת������Ϊ
 (7)
(7)
1.2 �����˶�����
Ϊ�������Խ½�ʽ��ж�������¼��裺1) ������ˮƽ�����˶��������ǵ��治ƽ��Ӱ�죻2) ���Կ���������3) ���Զ��˶�Ӱ�첻���Ħ��������ǰ����½Ӵ���Ħ�����صȣ�4) ��������ʱ�������Ա���Ϊ�������ԣ����ܵIJ���Ǹն�ϵ��K���Ͳ��������ϵ��C����Ϊ������
ϵͳ���ܶ��ܺ������ܾ���ϵͳ��������ʽ��ʾ����������������շ��̣�������ƫ���������ɵõ�ϵͳ���˶����̡���ʽ(2)~(7)�����ϵͳ���������̼��ɵ����½ӳ������ٶ�u�������ٶ�v����ڽ��ٶ�r�Ͳ���Ǧյ�7���ַ��̡�
��ǰ���壺
 (8)
(8)
 (9)
(9)

 (10)
(10)

 (11)
(11)
�Ժ��壺

 (12)
(12)

 (13)
(13)



 (14)
(14)
�½�ʽ����������ʻʱ��ǰ����������ٶ�Ϊ0 m/s2�������������������IJ��ˮƽ·����������ʻʱȫ����������������֮��Լ�����㡣��ʽ(2)~(14)�����������Ը�����С�˻���ɵ�
 (15)
(15)
ʽ�У� ��
�� ��
�� ��
��
2 ��̬ת���º�ڽ��ٶ������ǵı仯����
�½�ʽ��������̬ת����ʻʱ�������������������Ǧ�w�㶨����״̬�³�����ǰ���ٶȺ�ת��ǵȱ��ֲ���[16-18]���� ����ˣ�ʽ(15)��ת��Ϊ
����ˣ�ʽ(15)��ת��Ϊ
 (16)
(16)
���ݿ���ķ����ʽ(16)������⣬�õ���̬��ڽ��ٶ����� ��
��
 (17)
(17)

 (18)
(18)
 (19)
(19)
ʽ�У�mΪ����������LΪ���ֽ½ӳ���ǰ����ࣻL12Ϊǰ�ֵ��м��ֵľ��룻L23Ϊ�м��ֵ����ֵľ��룻L13Ϊǰ�ֵ����ֵľ��룻LhΪ�����½ӵ�ľ��룻dqǰ�������ľ�ǰ��ľ��룻dhΪ�������ľ����ľ��롣
ǰ����������λ�ò�����ƫ��ʱ����̥�Ĵ�ֱ�غɲ��䣬�� �����Ի��½��壬��ת��ϵͳ�ĸն�
�����Ի��½��壬��ת��ϵͳ�ĸն� ��ͬʱ��ǰ���Ϊa�������Ϊb����ˣ�
��ͬʱ��ǰ���Ϊa�������Ϊb����ˣ�

 (20)
(20)
ʽ�У� ��
�� ��a=
��a=  ��
�� ��
��
�����ж������̥�IJ�ƫ�ն�Ϊ������ʽ(20)��ʽ������[11]�еĹ�ʽ��ͬ����֤��KΪ��������ƫ�úͳ�������ʱ�½�ʽ�����IJ���ת��ϵ����KΪ��ʱ����Ϊ����ת��Ϊ��ʱ����Ϊ����ת��Ϊ��ʱ����Ϊ����ת��
��1��ʾΪ60 t�½�ʽ��ж���Ľṹ�������ɱ�1��֪��60 t�½�ʽ��ж���ڿ���ʱ�IJ���ת��ϵ��K=0.003 0������ʱK=0.001 1����Ϊ����ת�����о������ǻ��ڳ�����������¡�
��ʽ(16)�ɵý½�ʽ����ת������е���̬��������� ��
��

 (21)
(21)
��ʽ(17)��(21)�����½�ʽ��������̬�����º�ڽ��ٶ��복���������ֵ̬�����۹�ϵΪ
 (22)
(22)
3 �½�ʽ��������ƫ�öԲ����ȶ��Ե�Ӱ��
ǰ���������Ĵ���ƫ��ʱ���������������·��䣬���³���������̥��ֱ�غɷ����仯��ͼ3��ʾΪij��60 t�½�ʽ��ж����̥�����غ�ϵ�����ƫ�ն�ϵ����ʵ���������ͼ����ͼ3��֪����̥��ƫ�ն��洹ֱ�غɵı仯�Ƿ����Եģ����½�ʽ����ǰ��������������ƫ�ã�ǰ������һ����̥�Ĵ�ֱ�غ�ϵ��������[0.70��1.30]�仯ʱ����Ӧ��̥��ƫ�ն�ϵ��������[0.70��1.06]�仯��
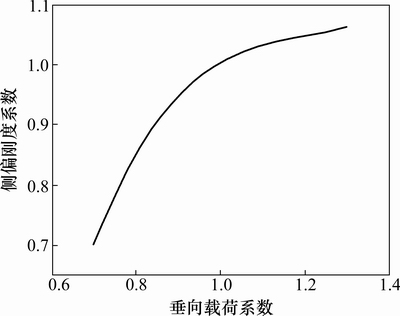
ͼ3 ��̥��ƫ�ն����䴹���غɵĹ�ϵ
Fig. 3 Relationship between tire stiffness and its vertical load
3.1 ����ƫ�öԺ�ڽ��ٶȵ�Ӱ��
��ʽ(17)�ɵó��½�ʽ�����Բ�ͬ������̬ת��ʱ����ڽ��ٶ����档ͼ4��ʾΪ�½�ʽ��������0~60 km/hת��ʱ��ǰ����������ƫ�öԺ�ڽ��ٶ������Ӱ�죬��������1��ӳǰ���������ľ����ڵ�ƫ�ã�����2��ӳֻ�к������Ĵ��ڵ�ƫ�ã�����3��ӳֻ��ǰ�������Ĵ��ڵ�ƫ�ã�����4��ӳ����ǰ���������ľ�δ����ʱ��ƫ�á���ͼ4������1��2������3��4�ԱȽ����֪�����½�ʽ����ǰ��������ķ���ƫ��ʱ����������̬��ڽ��ٶ��������½��ģ����������������ų��ٵ����Ӷ����ӡ�

ͼ4 ����ƫ�öԺ�ڽ��ٶȵ�Ӱ��
Fig. 4 Effects of centroid offset on yaw rate
��ͼ4������1��3������2��4�ԱȽ����֪�����½�ʽ�����������ķ���ƫ��ʱ����������̬��ڽ��ٶ����������ӵģ����������������ų��ٵ����Ӷ����ӡ�
�ɴ˿��Եó������½�ʽ�������ȶ���������һ�̶��½ӽ�ת��ʱ��ǰ���������ƫ�������ڽ��ͳ���ת��ʱ�ĺ�ڽ��ٶȣ������������ƫ�ý�������ת������еĺ�ڽ��ٶȡ���ͼ4��֪���ڳ���Ϊ60 km/hʱ���ԱȽ½�ʽ����ֻ�к������Ĵ���ƫ�ú�ֻ��ǰ�������Ĵ���ƫ��ʱ�����Եõ�ǰ�߱Ⱥ��ߵĺ�ڽ��ٶ�������7.7%�����ڳ��ٽϵ�ʱ���ı�������ƫ�öԺ�ڽ��ٶȵ�Ӱ���С��
3.2 ����ƫ�öԲ���ǵ�Ӱ��
��ʽ(21)�ɵó��½�ʽ�����Բ�ͬ������̬ת��ʱ��������档ͼ5��ʾΪ�½�ʽ��������0~60 km/hת��ʱ��ǰ����������ƫ�öԲ���������Ӱ�죬��������1��ӳǰ���������ľ����ڵ�ƫ�ã�����2Ϊֻ�к������Ĵ��ڵ�ƫ�ã�����3��ӳֻ��ǰ�������Ĵ��ڵ�ƫ�ã�����4��ӳ����ǰ���������ľ�δ����ʱ��ƫ�á���ͼ5������1��2������3��4�ԱȽ����֪���½�ʽ����ǰ��������ķ���ƫ��ʱ�������IJ�����������½��ģ����������������ų��ٵ����Ӷ����ӡ�
��ͼ5������1��3������2��4�ԱȽ����֪�����½�ʽ�����������ķ���ƫ��ʱ����������̬����������Ǽ�С�ģ����������������ų��ٵ����Ӷ���С��
�ɴ˿��Եó������½�ʽ�������ȶ���������һ�̶��½ӽ�ת��ʱ��ǰ����������ƫ�þ��ή�ͳ���ת������еIJ���ǣ������߶Բ���ǵ�Ӱ�������泵�ٵı仯��ͬ����ͼ5��֪��������Ϊ60 km/hʱ���ԱȽ½�ʽ����ǰ�������ľ�����ƫ�ú�ǰ�������ľ�δ����ƫ��ʱ��2����������߱�ǰ�ߵIJ���������� ��
��
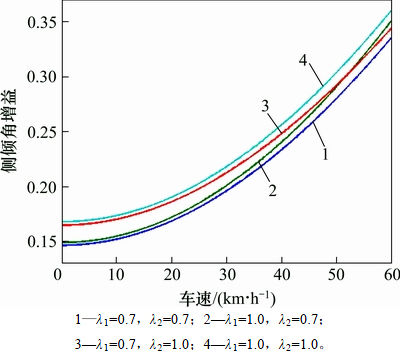
ͼ5 ����ƫ�öԲ���ǵ�Ӱ��
Fig. 5 Effects of centroid offset on roll angle
3.3 ����ƫ�öԲ���ת��ϵ����Ӱ��
��ʽ(18)�ɵó��½�ʽ����������ƫ������µIJ���ת��ϵ����ͼ6������ ��ʾΪ��������λ�ò��������£�ǰ��������ƫ�öԲ���ת��ϵ����Ӱ�졣ͼ6������
��ʾΪ��������λ�ò��������£�ǰ��������ƫ�öԲ���ת��ϵ����Ӱ�졣ͼ6������ ��ʾΪǰ��������λ�ò��������£���������ƫ�öԲ���ת��ϵ����Ӱ�졣��ͼ6��������֪�����½�ʽ����ǰ��������ķ���ƫ��ʱ����������ƫ�þ�������������ִ�ֱ�غɲ��Խ�����IJ���ת��ϵ��Խ�½�ʽ�����������Ӳ���ת��������ͼ6�������ԱȽ����֪������ת��ϵ������ǰ��������ƫ�õ���������ӵ�ԽѸ�١�
��ʾΪǰ��������λ�ò��������£���������ƫ�öԲ���ת��ϵ����Ӱ�졣��ͼ6��������֪�����½�ʽ����ǰ��������ķ���ƫ��ʱ����������ƫ�þ�������������ִ�ֱ�غɲ��Խ�����IJ���ת��ϵ��Խ�½�ʽ�����������Ӳ���ת��������ͼ6�������ԱȽ����֪������ת��ϵ������ǰ��������ƫ�õ���������ӵ�ԽѸ�١�
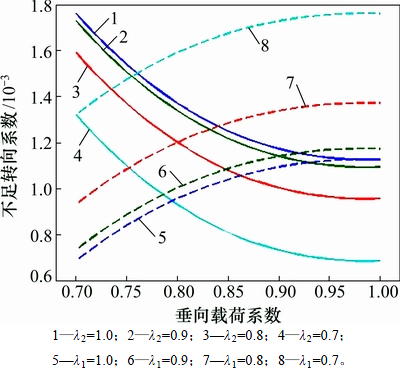
ͼ6 ����ƫ�öԲ���ת��ϵ����Ӱ��
Fig. 6 Effects of centroid offset on understeer parameter
��ͼ6��������֪�����½�ʽ�����������ķ���ƫ��ʱ����������ƫ�þ���Խ����������ִ�ֱ�غɲ��Խ�����IJ���ת��ϵ��ԽС���½�ʽ�������ڼ�С����ת��������ͼ6�������ԱȽ����֪����ת��ϵ�����ź�������ƫ�õ��������С��ԽѸ�١�
�ɴ˿��Եó������½�ʽ�������ȶ���������һ�̶��½ӽ�ת��ʱ��ǰ�����������ƫ�û��������IJ���ת���������仯�������ֱ仯����ƫ����������Խ��Խ���ԡ���ͼ6��֪���ڽ½�ʽ����ǰ����������λ�þ�������ƫ��ʱ�������IJ���ת��ϵ��K=0.001 1��ǰ��������ƫ�õ���ǰ��һ����غ�ϵ����1Ϊ0.7ʱ����ʱ����ת��ϵ��K=0.001 8��������δ����ƫ��ʱ����63.6%����������ƫ�õ��º���һ����غ�ϵ����2Ϊ0.7ʱ����ʱ������ת��ϵ��K=0.000 687��������δ����ƫ�ü�С��37.5%�������ӽ�����ת�ɼ�ǰ����������λ�õ�ƫ�öԲ���ת��ϵ����Ӱ��ܴ���ˣ��½�ʽ������������������Ҫ������֤��������IJ�����ƫ�ã�ͬʱ������½�ʽ��������ʹ�����ܵĻ����ϣ�ǰ���������ʵ���ƫ�ÿ�������䲻��ת�����Ա������ת��
4 ����
Ϊ����ģ�͵���ȷ�ԣ�������������̬ת�����顣�������Ϊij��60 t�½�ʽ�綯����ж�����ڼ�ʻ�ҵذ尲װ�ߵ�ģ��Գ�����ڽ��ٶȺͲ�����ٶ����ݽ��вɼ����ߵ�ģ����ͺ�ΪADIS16445�����ߵ�����1�����������Ǻ�1��������ٶȼơ�������ת���ʵIJ��Է�ΧΪ��250��/s������Ϊ0.01��/s���Ƕȴ�������װ��ǰ�����м�Ľ½��崦����������ǰ��������ת�ǡ��ýǶȴ����������ѹΪ24 V��������ΧΪ0��~135�㣬����źŵ���Ϊ4~20 mA���ߵ�ѹΪ0~5 V��
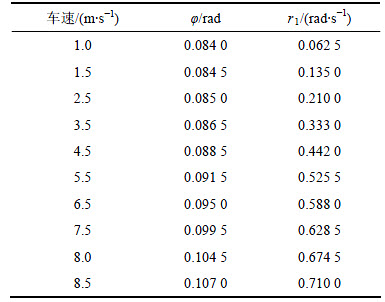
���ڿ��������������ƣ����磬��Ϊƽ̹��·���ϲ����˳�����Сת���е�����ʻʱ�ĺ�ڽ��ٶȺͲ���ǡ������Ϊ10�飬ÿһ�鳵�����ɾ�ֹ���ٵ���Ҫ���٣�Ȼ��ת�������̱��ֽ½���ת�Dz��䣬������һ�����ȶ���ʻ����60 s����¼ÿһ��ĺ�ڽ��ٶȺͲ�����ٶȡ�����Щ������д���������������ȶ�����ת��ʱ�ĺ�ڽ��ٶȺͲ���ǵ�ƽ��ֵ�����г����IJ�����ɲ�����ٶȻ��ֵõ���
��2��ʾΪ�������ȶ������º�ڽ��ٶ������ǡ�
ͼ7��ʾΪ�½�ʽ�����Բ�ͬ������̬ת��ʱ����Ǻͺ�ڽ��ٶȵļ�����������������ͼ7��֪������ת��������������ڽ��ٶȾ��������ӣ������ߵı仯�������������ߵ�����仯����һ�£����ߵı仯����һ�������߹�ϵ��֤���˱������۵���ȷ�ԡ�����ģ���к����˵��治ƽ��Ӱ�죬�Լ��Գ�������λ�ü�ת�������Ȳ���������ʵ�ʴ�������ˣ��������ߵĺ�ڽ��ٶȺͲ����������ֵ����ƫ�
��2 ��ڽ��ٶ���������������
Table 2 Test data of yaw rate and roll angle
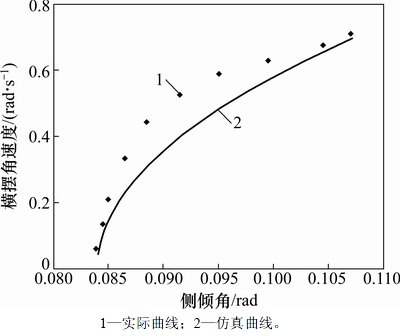
ͼ7 ��ͬ�����º�ڽ��ٶ������ǹ�ϵ����������Ա�
Fig. 7 Comparison of theory and experiment of yaw rate and roll angle under different vehicle speeds
5 ����
1) �½�ʽ����ת������еIJ����ȶ��Բ���ȡ���ڳ�����������������ȡ���ڳ���ת��ʱ�ij��١��½ӽ��Լ�ǰ����������ƫ�ó̶ȣ���ת������н½�ʽ�����ĺ�ڽ��ٶ�������Ҳ���ֳ����ӵķ����Թ�ϵ����ˣ������������ֹ�ϵͨ���������ܸնȺ�����Ȳ�������߽½�ʽ������ͬ�����µIJ����ȶ��ԡ�
2) �½�ʽ��������ת��ʱǰ����������ƫ�öԺ�ڽ��ٶȵ�Ӱ���С�����ٽϸ�ת��ʱǰ��������ƫ�������ڽ��ͳ����ĺ�ڽ��ٶȣ�ǰ����������ƫ�þ������ڼ�С����ת��ʱ�IJ���ǣ������߶Բ���ǵ�Ӱ�������泵�ٵı仯��ͬ������ƫ�öԽ½�ʽ�����IJ���ת��ϵ��Ӱ��ܴ�����ǰ��������ƫ�û�ʹ�½�ʽ����ת��ʱ����ת�����������ӣ�����������ƫ�ñȽ�Σ�գ�����ʹ�½�ʽ��������ת�������ڼ�С��
�ο����ף�
[1] ADAM R, LARS D, ANNIKA S T. Snaking stability of articulated frame steer vehicles with axle suspension[J]. Int J Heavy Vehicle Systems, 2010, 17(2): 31-42.
[2] ����, ����, �ڳ���, ��. ���������ȶ��Կ����۷�������[J]. ��ѧ�����빤��, 2012, 12(6): 1339-1347.
BAI Yan, JIA Xin, ZONG Changfu, et al. Review of objective vehicle handling evaluation[J]. Science Technology and Engineering, 2012, 12(6): 1339-1347.
[3] ���ͻ�, ����, ��. �������½�ʽ���̳��������ȶ��Կ��Ʒ���[J]. ũҵ����ѧ��, 2013, 29(12): 71-76.
SHEN Yanhua, LI Yanhong, JIN Chun. Analysis of handling stability for electric-driven articulated truck[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(12): 71-76.
[4] CHEN L K, SHIEH Y A. Jackknife prevention for articulated vehicles using model reference adaptive control[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2011, 225(1): 28-42.
[5] �����, �����, ��־ΰ, ��. ��������г�ֱ����ʻ��������о�[J]. ��������, 2005(1): 11-14.
LIU Hongfei, XU Hongguo, GUAN Zhiwei, et al. Study on shimmy of a semi-trailer combination vehicle driving on straight line[J]. Automobile Technology, 2005(1): 11-14.
[6] AZAD N L. Dynamic modeling and stability controller development for articulated steer vehicles[D]. Waterloo: University of Waterloo, 2006: 51-67.
[7] ��ǿʤ. �½�ʽ��������ֱ����ʻ��̬����[J]. ũҵ��еѧ��, 2003, 34(4): 39-42.
GE Qiangsheng. Simulation of high-speed and straight-line traveling dynamic characteristics of articulated vehicles[J]. Transactions of the Chinese Society of Agricultural Machinery, 2003, 34(4): 39-42.
[8] AZAD N L, KHAJEPOUR A, MCPHEE J. A survey of stability enhancement strategies for articulated steer vehicles[J]. Int J Heavy Vehicle Systems, 2009, 16(1/2): 26-48.
[9] ����, �����. �½ӳ���ת�����ȶ���[J]. ���ִ�ѧѧ��(��ѧ��), 2012, 42(2): 266-271.
ZHANG Yang, LIU Xinhu. Yaw stability for steering motion of articulated vehicle[J]. Journal of Jilin University (Engineering and Technology Edition), 2012, 42(2): 266-271.
[10] ������, �����. �����غ�ת����˫ǰ�����������ȶ��Է���[J]. ũҵװ���복������, 2014, 52(11): 22-26.
WANG Xiaobin, ZHANG Qingjun. Handling stability analysis of dual-front-axle vehicle based on lateral load transfer[J]. Agricultural Equipment and Vehicle Engineering, 2014, 52(11): 22-26.
[11] ����, ����. ����ϵͳ����ѧ[M]. ����: ��е��ҵ������, 2005: 58-68.
YU Fan, LIN Yi. Vehicle system dynamics[M]. Beijing: China Machine Press, 2005: 58-68.
[12] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 169-171.
YU Zhisheng. Automobile theory[M]. 5th ed. Beijing: China Machine Press, 2009: 169-171.
[13] �����, ����. �½�ʽ���̻�е����ת������������[J]. ������Һѹ, 2008, 36(3): 105-107.
LIU Xinhui, ZHANG Yang. Analysis for pressure fluctuations of the steering system of the articulated vehicle[J]. Machine Tool and Hydraulics, 2008, 36(3): 105-107.
[14] ���Ҿ�, ���廪. �½ӳ���Һѹ����ת��ϵͳ��̬���Է���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2004, 35(1): 80-85.
YANG Zhongjiong, HE Qinghua. Simulation of dynamic characteristics of hydraulic power steering system of articulated vehicles[J]. Journal of Central South University (Science and Technology), 2004, 35(1): 80-85.
[15] �߽���, ��ͬ��, �����, ��. �½�ʽװ�ػ�ת���˶�ѧ����ѧ�����������о�[J]. ������е, 2006(4): 63-66.
GAO Jianming, WANG Tongjian, XU Jinyong, et al. Simulation and experiment research on steering kinematics and dynamics of articulated loaders[J]. International Construction China, 2006(4): 63-66.
[16] ������, ����. �½�ʽ�������Ŷ���˲̬����̬��Ӧ(��)[J]. ��ɽ��е, 2008, 36(9): 26-29.
WANG Jianchun, LIU Wang. Transient and steady responses of articulated vehicle to disturbance moment(I)[J]. Mining and Processing Equipment, 2008, 36(9): 26-29.
[17] ������, ����. �½�ʽ�������Ŷ���˲̬����̬��Ӧ(��)[J]. ��ɽ��е, 2008, 36(11): 35-39.
WANG Jianchun, LIU Wang. Transient and steady responses of articulated vehicle to disturbance moment(II)[J]. Mining and Processing Equipment, 2008, 36(11): 35-39.
[18] ����, �����. ��������ѧ���ɿ�������[J]. ũҵ��еѧ��, 2008, 39(6): 1-6.
YU Fan, LI Daofei. Review on integrated vehicle dynamics control[J]. Transactions of the Chinese Society of Agricultural Machinery, 2008, 39(6): 1-6.
(�༭ ����ƽ)
�ո����ڣ�2016-10-21�������ڣ�2017-01-18
������Ŀ(Foundation item)�����Ҹ����о���չ�ƻ�(863 �ƻ�)��Ŀ(2011AA060404)�������У��������ҵ���ר���ʽ�������Ŀ(FRF-TP-15-024A1)(Project(2011AA060404) supported by the National High Technology Research and Development Program (863 Program) of China; Project(FRF-TP-15-024A1) supported by the Fundamental Research Funds for the Central Universities)
ͨ�����ߣ����壬��ʿ�� �����ڣ����·ǹ�·����������о���E-mail��yangjue@ustb.edu.cn
ժҪ�����ݵ������½�ʽ��ж���Ľṹ�ص㣬���һ�ֿ��dz������������ƫ������µij����˶�ģ�ͣ�ͨ����������̬ת������еĺ�ڽ��ٶ����桢����������Լ�����ת��ϵ����������ڽ��ٶ������ǵ����۹�ϵ������ǰ����������ƫ�öԳ��������ȶ��Ե�Ӱ�졣�о�������������������������֤�Ľ�������Ǻϣ��½�ʽ�����Բ�ͬ������̬ת��ʱ��ڽ��ٶ������dz��ֳ�һ�������߹�ϵ����ǰ����������ƫ�öԳ���ת������еIJ����ȶ������Ų�ͬ��Ӱ����ɣ����о���Ϊ�½�ʽ���������ȶ��Ե��ۺϿ����ṩ���۲ο���
[2] ����, ����, �ڳ���, ��. ���������ȶ��Կ����۷�������[J]. ��ѧ�����빤��, 2012, 12(6): 1339-1347.
[3] ���ͻ�, ����, ��. �������½�ʽ���̳��������ȶ��Կ��Ʒ���[J]. ũҵ����ѧ��, 2013, 29(12): 71-76.
[5] �����, �����, ��־ΰ, ��. ��������г�ֱ����ʻ��������о�[J]. ��������, 2005(1): 11-14.
[7] ��ǿʤ. �½�ʽ��������ֱ����ʻ��̬����[J]. ũҵ��еѧ��, 2003, 34(4): 39-42.
[9] ����, �����. �½ӳ���ת�����ȶ���[J]. ���ִ�ѧѧ��(��ѧ��), 2012, 42(2): 266-271.
[10] ������, �����. �����غ�ת����˫ǰ�����������ȶ��Է���[J]. ũҵװ���복������, 2014, 52(11): 22-26.
[11] ����, ����. ����ϵͳ����ѧ[M]. ����: ��е��ҵ������, 2005: 58-68.
[12] ��־��. ��������[M]. 5��. ����: ��е��ҵ������, 2009: 169-171.
[13] �����, ����. �½�ʽ���̻�е����ת������������[J]. ������Һѹ, 2008, 36(3): 105-107.
[14] ���Ҿ�, ���廪. �½ӳ���Һѹ����ת��ϵͳ��̬���Է���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2004, 35(1): 80-85.
[15] �߽���, ��ͬ��, �����, ��. �½�ʽװ�ػ�ת���˶�ѧ����ѧ�����������о�[J]. ������е, 2006(4): 63-66.
[16] ������, ����. �½�ʽ�������Ŷ���˲̬����̬��Ӧ(��)[J]. ��ɽ��е, 2008, 36(9): 26-29.
[17] ������, ����. �½�ʽ�������Ŷ���˲̬����̬��Ӧ(��)[J]. ��ɽ��е, 2008, 36(11): 35-39.
[18] ����, �����. ��������ѧ���ɿ�������[J]. ũҵ��еѧ��, 2008, 39(6): 1-6.
