
��������Ƶ���ټ���
����ƽ��������������
(���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
������ֲ���ϵͳ���ڵ����⣬�ڷ������о��������������ͼ���ص�Ļ����ϣ�������ü�������߹����еļ��ͼ��Լ����������Ƶ���ٵIJ����²��ԡ����û���ƥ��Ĺ�����������Ƶ���١�������������Ƶ���ټ�������������о�������˿�ѧ����Ƶ�����㷨�����в���ʵ�顣ʵ������֤����Ƶ�����㷨����ȷ�ԣ������ò��ٷ�������һ���ľ�ȷ�Ⱥ�ʵʱ�ԣ����нϸߵ�Ӧ�ü�ֵ��
�ؼ��ʣ�
����������Ƶ��������������ģ�崰����ƥ����
��ͼ����ţ�TP391.9 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S2-0330-07
Speed-measuring technology of deep-sea mining collector
WANG Sui-ping, GUI Wei-hua, PENG Liang
(School of Information Science and Engineering, Central South University, Changsha 410083, China)
Abstract: Aiming at the existing gear speed-measuring system, a new speed measuring strategy was proposed. The monitoring images of the mining collectors were analyzed and the characteristic of the deep sea mining vehicle working environment was researched. The match-based approach of optical flow was adopted to carry out video speed-measuring. Deep research on the speed-measuring technology of the deep-sea mining collector was made, proposes scientific algorithms of the video speed-measuring were proposed, and the speed-measuring experiment was carried out. The result of experiment proves the correctness of the video speed-measuring algorithm, indicating that the algorithm has definite precision and stability and possesses higher application value.
Key words: deep-sea mining collector; video speed-measuring; optical flow approach; model window; matching
��������һ����ˮ��5~6 km����ײɼ��������˵��Ĵ��������������ٶ��ǶԼ�������߽�����Ч���ƺͷ�ӳ���˶�״̬����Ҫ�����������еij��ֲ���ϵͳ��ʵ����̴���һЩ���⣬Ӱ����ϵͳ�Ĺ�������[1]��
�����������Ŀǰ��������ٷ�����ڵ����⣬�о���������Ƶ���ټ���������Ƶ���ټ����������������ٶȲ����У����ڽ��Ŀǰ���������ٷ�����ڵ����⡣��ϵͳ��һ���Լ�����Ӿ���ģʽʶ���ѧΪ�������ݣ����Զ��ֹ���ѧ���ĸ߿Ƽ��������һ�廯ϵͳ�������п�ѧ������ָ�����������ڶ��¼���ʹ��Ƶ����ϵͳ���п�ѧ�ϵ��Ƚ��ԣ����������ʹ�����ʵʱ�����������ڷ������о���������������ͼ��������������ü�������߹����еļ��ͼ���������������Ƶ���ٵ��ٶȲ����²��ԣ����Ŀǰ����������ϵͳ�д��ڵ����⡣
1 ��������Ƶ����ԭ��
�����������߹����У���������������ֹ���壬����������ɼ�ǰ��·�澲ֹ������������������ƶ��ٶ�����Ӳ����������������ٶ�[2]��ͼ1��ʾΪģ�������������Ƶ�ź��������ɼ�����֡ͼ��
��������߶Ȳ��������£��ҵ���֡ͼ���еĶ�Ӧ�㡢��Ӧ���߶�Ӧ�飬�ֱ�λ��Ӧ����Ӧ��������ͼ���е�λ��S1(t1ʱ��)��S0(t0ʱ��)��������Եõ���Ӧ����߶�Ӧ����t1- t0 (����t)ʱ�����ƶ������ؾ���(S1-S0)(��ͼ1��ʾ)�������ٶȹ�ʽ��������øÿ���ͼ���е��ƶ��ٶȡ�
ͼ1�У�����ȡֵ���£��Ӿ������ǶȦȡ�60�㣬�Ӿ�c��13 m�������������ľ���d ��10 m������t��Сʱ����d��d��Ⱥ�С�����Ժ���ͼ1�Цȵı仯���ȣ����������ɦȲ������ӣ���ʱ��������Ϊ����Ұ��Χ�����е����������������Ǿ�Ϊ�ȡ�
����Ƶ�ź��н�ȡ��ͼ����ߡ����ֱ�Ϊ352���غ�288����(��Ϊ����Ƶ�źŷֱ���)�����������Ұ��Χ���Կ���a��b������Ƶ�����ĸ߶���������ʵ��·��ij���Ϊa������Ϊb��
![]() (1)
(1)
![]() (2)
(2)
��ʽ(1)��(2)�ɵã�
![]() (3)
(3)
�Ӷ��õ����������ٶȣ�
![]() (4)
(4)

ͼ1 ��t0��t1ʱ����֡ͼ��
Fig.1 Two images at t0 and t1
2 ����ƥ��Ĺ��������㷨
�����������߹����У��������װ�ڼ�����ϣ���������˶��ģ������·�澰���Ǿ�ֹ�ģ��ɼ�����ͼ�������������˶�����ˣ��������߲��û���ƥ��Ĺ���������ͼ����٣��Ӷ�ʵ����Ƶ���١����õ������㷨����ͼ��ͼ2��ʾ��
�Ӿ��˶���������Ҫ�о���δ�һϵ�в�ͬʱ�̵�ͼ���У���ȡ���йس���������Ľṹ��λ�ú��˶���Ϣ���������˶�����Ĺ�����Ҫʵ����������ʵʱ���٣�ͨ����ȡ�������س������˶�����Ĺ��������ʵ������������������ٶȲ��������ԣ���س������˶�Ŀ���ѡȡ����������ԡ����ڴˣ��������߲��û���ƥ��Ĺ������㷽����������ģ��ƥ��ķ�ʽ��һ����ͨ������ƥ�������λ���������������̣���һ����ֻ����ģ������Ĺ��������þֲ�������ӳ����ͼ������ı仯����������˹������㷶Χ���������������ϵͳ��ʵʱ��[3]��
ƥ�䷨��ʵ������ͼ�����е�˳��ͼ���֮��ʵʩ��һ�ֶ�Ӧ���������ٶ�(����)����Ϊʹ�ò�ͬʱ��ͼ������֮����������ϵ�λ��[4]�������ٶ�(u, v)����Ϊ��ͬʱ��ͼ�������λ����d=(dx, dy)��ʹ�ò�ͬʱ�̵�ͼ������ƥ����ѡ�Ϊ���ҵ����ƥ�䣬�ɶԶ�����d�ϵ����ƶ������һ�������ϵ���������(ģ��ƥ�䷨)��Ҳ�ɶ�ijһ����������ǿ�Ȳ��ƽ���ͽ�����С�����Ӷ��ҵ����ƥ������

ͼ2 �����㷨����ͼ
Fig.2 Flow chart of overall algorithm
2.1 ģ���ѡȡ����ƥ��
2.1.1 ģ���ѡȡ
������������֡ͼ��I1��I2������ͼ��I1�е�ÿ�����ص�(x, y)���Դ����ص�Ϊ���ģ��γ�һ����СΪ(2n+1)��(2n+1)��ģ�崰Wc��Χ��ͼ��I2�Ķ�Ӧ���ص�(x, y)����һ���ߴ�Ϊ(2n+1)��(2n+1)��������Ws��
���ǵ����������ߵ�·�治ƽ�������ײ��������Լ�ת��ʱ�IJ������⣬�������߲���2��ģ�崰�ڣ���ͼ��I1��I2�Ĵ�С��ΪM��N����ͼ��I1�У�����ѡ��2��ģ�崰�ڣ���СΪ(2n+1)��(2n+1)�������Ͻ�Ϊ����ԭ�㣬ģ�崰��ѡȡ�ľ����㷨Ϊ��
(1)��ͼ��I1�������ص�![]() (M��NΪ����ʱ)��
(M��NΪ����ʱ)��![]() (M��NΪż��ʱ)��ʼ��˳ʱ��������������
(M��NΪż��ʱ)��ʼ��˳ʱ��������������
![]()
![]() (5)
(5)
![]()
![]() ʱ����(x, y)Ϊ����(����(x1, y1))��������1��ģ�崰��I11��
ʱ����(x, y)Ϊ����(����(x1, y1))��������1��ģ�崰��I11��
(2)��(x1, y1)��������һ��Ϊ��ʼ�㣬������ʽ(5)(������������1������ʱ����������)ʱ��������2��ģ�崰��I12���������������(x2, y2)��
��352��288�����ͼƬΪ������ģ�崰�ڴ�СΪ35��35����2��ģ�崰�ڣ���ͼ3��ʾ�����У�T= 10��(x1, y1)=(174, 161)��(x2, y2)=(210, 140)��

ͼ3 ģ�崰��
Fig.3 Template window
2.1.2 ģ���ƥ����
��ģ�崰��ƥ���У�ƥ�����ƥ��ľ���Ӱ�첻������MAD����Ҫ���г˷����㣬ʵ�ּ����㣬����ʹ����࣬ʵ�������л�����ȥ������Ҫ�ij�������ˣ�ͨ����MAD��ΪSAD������;������(Sum of absolute difference)[5]��SAD�Ķ������£�
![]() (6)
(6)
��Ҫ�ҵ����ŵ�ģ��ƥ�䴰�ڣ����ڴ�СΪ(2n+1)��(2n+1)����
![]()
![]() (7)
(7)
ȡ��Сֵʱ���õ�ģ�崰�ڵ�����ƥ��㣬ƥ���Ϊ��Ӧģ�崰�ڵ����ģ���¼ģ�崰�����ĵ�λ�ƣ���2��ģ�崰�����ĵ��λ����ȡƽ��ֵ����Ϊ����ͼ�ڵ�λ��d���Ӷ����ݼ�¼��ʱ������t���õ�����ͼ�ڵĹ�������ˮƽ�ʹ�ֱ������ٶȷ�����
2.2 ��������
��������ѡ���ǡ������ģ��ƥ���ȷ�ԺͿ����Զ��кܴ��Ӱ�졣�й��������Ե��о���Ҫ�ǽ���˶������д��ڵļ��㸴�ӶȺ�����������һì�ܡ����ģ��ƥ���㷨��ȫ�����㷨(FSA)������һ����������Χ�ڶ����п��ܵĵ�������ƥ�䡣ȫ�����㷨�ļ�����������������ʵ��Ӧ�ã���ˣ��ܶ�ѧ���������������㷨����Ҫ���Է�Ϊ����3�ࣺ(1)��������������Χ�ķ��������ͷ�����3������ʮ���������ȣ�(2)���ڼ���ÿ��ƥ��������ķ����������������������̭���ȣ�(3)ǰ���ַ������ӽ��㷨��
�������Է�2���������һ�����Ϊģ�崰��ѡȡ�ڶ�֡ͼ����ģ�崰�ڵ�����ƥ��͵ڶ�֮֡������ͼ��ģ�崰�ڵ�����ƥ�䡣��һ��������������������ԣ��ּ�����ϸ����2���Ρ����ȣ��ڴּ����Σ�������ģ�崰��ÿ�ζ��ƶ�һ������λ�ã������ƶ����ɸ�����λ������ͼ���ص�����ƥ�䣬�Ӷ������Ӧ���ڴ��ڵĴ��·�Χ����Σ�ֻ�ڸ÷�Χ����ģ�崰��ÿ���ƶ�һ������������ƥ�䣬�ҳ���;������(SAD)��С��λ�ã��Ӷ��õ�ģ�崰�ڵ�����ƥ��㡣����������������������ʹƥ����������١�����ʱ�����̣���ˣ�ʵʱ�Ե�����ߡ��ڶ������������ѡ��ģ�崰�ں�õ��ĵڶ�֡ͼ��֮���û���KalmanԤ����������ԣ�����Kalman�˲�������Ԥ��λ�õ�һ�������ڽ���ģ�崰��ƥ�䣬��С������Χ�����ʵʱ�ԡ�
2.3 ģ�����
ģ����£����Ƕ�ģ�����ݽ��б�Ҫ�ĸı䣬����Ӧ���ϱ仯���˶�����ͳ����仯�������˼�������õ�ǰ֡��ģ�崰��ͼ����Ϊ��һ��ʱ�̵�ƥ��ģ�壬�������ͽ���˴���ͼ�ϸı��ģ�岻������⡣���������Ҳ��һ�����⣬���º��ģ��ͳ�ʼģ�����һ��������Ȼ��С����������ʱ������ƣ�ģ���ͼ��֮���������Խ��Խ������������ݴ���Χ���ͻ����ͼ��Ư�ƣ�Ҳ�����������١����ԣ���ģ����µ�ͬʱ��Ҫ�ҵ�һ���취�����ϼ��������ۣ����ܸ��õ�ʵ��Ԥ�����ڡ���ˣ���Ҫ�Ե�ǰͼ����ж���ƥ�䣬һ��������º��ģ�壬��һ�������ʼģ�壬����ƥ��ó��������p1��pn�����������IJ�ֵ�������ij����ֵ������ǰ��ģ����Ϊ�¸�ʱ�̵�ģ�壬�����õ�ǰ����ͼ����Ϊ�¸�ʱ�̵�ģ�塣
����ģ����·����ڵ�n֡������ǰ֡��ģ��ΪTn(i, j)��������ʽ�������ƶȣ�
![]() (8)
(8)
���У�pn�Ǹ�ʱ��ijһƥ�䴰�ڵ�ͼ�����Ӧģ��֮��IJ�ֵ�������ֵԽС��֤����λ�õ�ͼ�����ݺ�ģ������ƥ��ġ�W(x, p)��һ���������ӣ�������ʽ���£�
![]() (9)
(9)
x���ڶ�Ӧ�����(i, j)������ֵ��p=(p1, p2, p3, p4)T��һ��������Tn(x)�Ǹ�ʱ�̵�ģ�塣
ģ����·����¼��������
(1)����Ҫ����
![]() (10)
(10)
����ǰ֡���1֡����ģ����ȫƥ�䣬����Ҫ���¡�
(2)һ��ĸ���
![]() (11)
(11)
��ÿһ֡����ƥ�����͵�ǰ���ƥ��λ�õ�ͼ�����ݴ���ԭ����ģ�����ݣ��ﵽ����Ч�������ǣ��������������һ�������ۣ�����ʱ������ƣ����ܻᶪʧĿ�����壬������Ҫ�����µ�3�ֲ��ԡ�
(3)�����������ģ�����
��ʽ(8)����һ���Ľ�
![]() (12)
(12)
�ڵ�n֡ʱ����Ӧƥ���ͼ�����ݺͳ�ʼģ�����ݵIJ�ֵ������p��n�����㹫ʽ���£�
![]() (13)
(13)
��ʽ(10)��(11)��ȣ�ʽ(12)��(13)����gdmin����argmin��gdmin��ָ�ݶȱ仯��һ��˥����Сֵ��
�������ʽ![]() ����ô��
����ô��![]()
![]() ������
������![]() ��
��
���������pn��p��n֮��ľ������С����ֵ�ţ���֤����ǰƥ�������ͼ���ԭʼͼ��û��̫���ƫ��ɽ��и��£���������Ϊ��ǰƥ�������ͼ���ԭʼͼ����һ����ƫ�룬����һ֡��ģ�壬�����и��¡�
3 ʵ����
�Ե�2������������ɿ�����ϵͳ���ɺ��ۺ����顱���������Ƶ¼��Ϊ�о������û���ƥ��Ĺ������ٷ��ֱ���е��ٺ���ʵ�飬��֤�㷨����ȷ�ԡ��������Ⱥ�ʵʱ�ԡ�
3.1 ����ʵ��
����ʵ��������1��ͼ4��
������궨�ı任��ʽ�������ͼ���ʵ���ƶ��ٶȣ��Ӷ��õ�����������ʻ�ٶȡ�
��ʵ�������Կ�����������ʻ�µ��ٶȲ���ȷ�Ƚϸߡ��Ҿ��Ƚϸߡ�ʵʱ�Ժã��ܹ������������IJ���Ҫ��
3.2 ����ʵ��
��������������2��ͼ5��
��������궨�ı任��ʽ�������ͼ�ڵ�ʵ���ƶ��ٶȣ��Ӷ���ӵõ�����������ʻ�ٶȡ�
��ʵ�������Կ�����������ʻ�µ��ٶȲ���ȷ��Ҳ�ϸߡ����Ƚϸߡ�ʵʱ�Ժã��ܹ������������IJ���Ҫ��
��1 ����ʵ��ʱ����������ʻ�ٶ�
Table 1 Speed of deep-sea mining machine under low-speed experiment


ͼ4 ����ʵ��ʱ���������9֡ͼ��
Fig.4 Nine images of continuous shooting under low-speed experiment
��2 ����ʵ��ʱ����������ʻ�ٶ�
Table 2 Speed of deep-sea mining machine under high-speed experiment

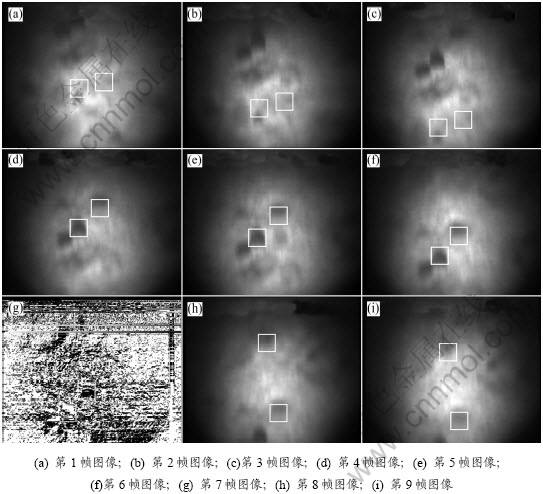
ͼ5 ����ʵ��ʱ���������9֡ͼ��
Fig.5 Nine images of continuous shooting under high-speed experiment
4 ����
�ӹ������о���״��������������ҵ�Ļ���ͼ���ص����������˻���ƥ��Ĺ��������㷨��������Ӧ��������������Ƶ�����С�������������ʻ�ڸߡ���������µ�¼������������Ƶ���ٵĵ͡�����ʵ�顣ʵ��������������ƥ��Ĺ��������㷨�ܹ�ȷ�ز����������ʻ���ٶȣ��Ҳ��پ��ȸߡ�ʵʱ�Ժá�
�ο����ף�
[1] ������. �������ļ��ֲ��ٷ�ʽԭ�������ܵķ����Ƚ�[J]. ���켼��, 2003(3): 33-35.
AN Fu-dong. Comparison among several vehicle-testing methods[J]. Police Technology, 2003(3): 33-35.
[2] ͯ����, ������. ���ڼ����Ƶͼ��ij�������[J]. �й�ͼ��ͼ��ѧ��, 2005, 10(2): 192-196.
TONG Jian-jun, ZOU Ming-fu. Speed measurement of vehicle by video image[J]. Journal of Image and Graphics, 2005, 10(2): 192-196.
[3] ����. ͼ����������㼼���о���չ[J]. �й�ͼ��ͼ��ѧ��, 2002, 7(5): 434-439.
CHEN Zhen. The research of image optical flow estimation[J]. Journal of Image and Graphics, 2002, 5(5): 434-439.
[4] Nagel H H, Enkelmann W. An investigation of smoothness constraints for the estimation of displacement vector fields from images sequences[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8: 565-593.
[5] Keraner J K, Thompson W B, Boleyn D L, Optical flow estimation; an error analysis of gradient-based methods with local optimization[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, 9: 229-244.
(�༭ ����Ƽ)
�ո����ڣ�2011-06-15�������ڣ�2011-07-15
������Ŀ�����ʺ��������о�������ʮ�塱��Ŀ(DY105-03-02-06)��������Ȼ��ѧ����������Ŀ(60505018)
ͨ�����ߣ�����ƽ(1956-)���У����Ͻ����ˣ���ʿ�����ڣ������˹����ܡ�������ˡ��ֳ��������������ϵͳ���о��� E-mail: wangsp@csu.edu.cn
ժҪ�����Ŀǰ���������ֲ���ϵͳ���ڵ����⣬�ڷ������о��������������ͼ���ص�Ļ����ϣ�������ü�������߹����еļ��ͼ��Լ����������Ƶ���ٵIJ����²��ԡ����û���ƥ��Ĺ�����������Ƶ���١�������������Ƶ���ټ�������������о�������˿�ѧ����Ƶ�����㷨�����в���ʵ�顣ʵ������֤����Ƶ�����㷨����ȷ�ԣ������ò��ٷ�������һ���ľ�ȷ�Ⱥ�ʵʱ�ԣ����нϸߵ�Ӧ�ü�ֵ��
