
����Ӧģ�������ڴ�����������е�Ӧ��
����ǿ����������Ф��÷
(�Ϻ����´�ѧ �����Զ���ϵ���Ϻ���200135)
ժ Ҫ��
���һֱ�Ǵ����˶����Ƶ���Ҫ�о�����֮һ�����봬�����еľ����ԡ���ȫ�Ժ�������������ء����ڴ����Ķ�̬���д���ԡ���ʱ�ͺͷ����Ե��ص㣬����ģ�Ͳ����㶯�Լ������˶��з硢�ˡ����������ŵ�Ӱ�죬ʹ�ÿ���������Ƴ�Ϊһ�����ӵ����⡣�о������������ٿ������⣬��������Ӧģ�����Ʒ�������ƴ����������ٿ�������Ӧ��Matlab���湤����һ��ģ�ʹ�Ϊ������ƵĿ��������м���������о�������������������ʵ�ʺ����ܹ����������������ﵽ�����Ч������֤����ƿ���������Ч�ԡ�
�ؼ��ʣ�
�������������������ٿ���������Ӧģ��������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0985-06
Adaptive fuzzy control and its application for ship steering
NIE Hai-qiang, WANG Xi-huai, XIAO Jian-mei
(Department of Electrical and Automation, Shanghai Maritime University, Shanghai 200135, China)
Abstract: The design of ship course controller is one of the most important research topics of ship motion control, which is closely related to the economic, security and comfort of ship. Because of the high inertia, strong time lag and non-linearity characteristics, the model parameter perturbations, as well as the effects of wind, wave and current disturbances, designing a high performance ship course controller is always a very complex issue. The ship trajectory tracking control was investigated. The ship trajectory tracking control was designed by the adaptive fuzzy control method. Eventually, the simulation studies for a replica were carried out by utilizing Matlab toolbox. The simulation results are satisfied that the actual trajectory of the ship can track the desired one and the effectiveness of the controller is verified.
Key words: non-linearity; ship trajectory tracking control; adaptive fuzzy control
��20����90���ĩ�����ǿ�ʼ�Դ����������Ƶ��о������˼���Ĺ�ע�������ڴ��������� ��[1]�������о��Ѿ�ȡ��һЩ�о��ɹ������ֿ����㷨����ӿ�֣�Ϊ���������ṩ�˳�����������ݡ�Pacini��[2]����LQG������ƿ�����ʹ������������ϵͳ�ﵽ�ֲ������ȶ�����׳��[3]Ӧ��ģ����PID���ϵķ���ʹ������������ϵͳ�ﵽ��ȫ��ָ���ȶ���Ч�����Ź�[4]���÷�������֪�����繹����MFA�Զ���ϵͳ��ʹʵ�ʺ����ƽ��ƻ����ߡ�������������������ģ�ͣ���Щ��Ȼ���÷����Դ�ģ������ȡ�õĿ���Ч����һ���ľ��ޡ�����������һ����Ϊ���ӵĿ��ƹ��̣����ڴ�����̬���д���ԡ�ʱ�͡������Ե��ص㣬���ں����������ܷ硢�ˡ����Ȼ������ص�Ӱ��ʹ�ô����������Ƴ�Ϊһ�����и�����ķ����Կ���[5]���⡣��������Ӧģ��ģ�͵Ĵ����������ٿ���������ƣ��������㵱��Դ����Ż��������ܵ�Ҫ��
��������������Ӧģ������[6-7]�����ۻ��������ô������ݵ�ƽ���˶�ģ��[8]������ģ�Ͳο�����Ӧģ�����Ʒ�������������Ӧģ�����ƵIJٶ�ϵͳ���Դ����ٶ�ϵͳ���з����о�������MATLAB����[9]����ģ�Ͳο�����Ӧģ�����������ڴ����ٶ�ϵͳ���۲캽���������ߣ�����ϵͳ�Ŀ������ԡ�����������������ʵ�ʺ����ܸ��������������ﵽ����Ŀ���Ч������֤����ƿ���������Ч�ԡ�
1 ϵͳ����
1.1 ����Ӧģ�����Ʋٶ�ϵͳ[10-11]
����Ӧģ�����Ʋٶ�ϵͳ��ͼ[2]��ͼ1��ʾ����ͼ1���Կ������ÿ���ϵͳ������Ӧģ������������ŷ�ϵͳ�����������źͱ�Ҫ�Ĵ�������ɡ�
�òٶ�ϵͳ�ǽ�����Ӧ����ͨ��ģ���㷨��ʵ�֡�ͼ1�У���rΪ��������Ϊʵ�ʺ���e(e=��r-��)��ec(ec=de/dt)�ͦ�c�ֱ�Ϊ���������仯�ʺͿ��ƶ�ǣ�k1��k2Ϊƫ���仯�ʵ��������ӡ�
1.2 ����ƽ���˶�ģ��
���������˶���ѧģ��[8]�����������˶������жԿ�������(���)����Ӧ���ԣ��˽�����մ����˶�ģ���ǶԴ������з����о��Ļ�����
������ʵ���˶��쳣���ӣ���һ������¾���6�����ɶȡ��ڸ�������ϵ�ڿ��죬�����˶���������3��������������ƶ���Χ��3�������������ת����ǰ����ǰ���ٶ�u����Ư�ٶ�v������ٶ�w��������������ҡ���ٶ�r����ҡ���ٶ�p����ҡ���ٶ�q�������ڹ�������ϵ�ڿ��죬�����˶�����������3���ռ�λ��x��y��z�Լ�3����̬�Ǽ���ҡ�Ǧס���ҡ�Ǧա���ҡ�Ǧ���������
��ѧģ����ʵ��ϵͳ�ļ�̫���Ӻ;�ϸ��ģ�Ϳ��ܰ������ڹ��ƵIJ�����Ҳ�����ڷ��������������о����������������⣬���Կ��Ժ�������˶�����ҡ�˶�����ҡ�˶�����ֻ������ǰ���˶�����Ư�˶�����ҡ�˶��������ͼ�һ��ֻ��3�����ɶȵ�ƽ���˶����⡣����ƽ���˶�����ϵ��ͼ2��ʾ�����У�O��Ϊ������ϵԭ�㣬�ڴ����������о��У�O��ͨ��ȡ�ڴ������洦��Ox��ȡΪ�����ᣬ��ָ����Ϊ����Oy���������洹ֱ����ָ������Ϊ����Oz�ᴹֱ��ˮ���棬��ָ������Ϊ���������������һ���̽��ڴ����ϵ���������ϵ��
���ݱ������ԺͽǶ����غ㶨�������Եõ�����������ˮƽ����ݵ����ᵴ����ҡ�˶��ķ���ʽ:
ʽ�У�mΪ������������XGΪ�������ĵ����ꣻIzΪ������z���ת��������rΪ������ת���ٶȣ�u��v�ֱ��ʾ��Ox��Oy������ٶȣ�X��Y��NΪˮ���������ء�
����һ�㴬���IJ����˶������ǵ��ٶ��������ʵʩ�IJٶ��ٶ������ģ��Ҵ��������Ĺ��ԺܴʶԸ�Ƶ�Ŷ���Ӧ��С�������ڲٶ���Ӧ�У���Ҫ�ǵ�Ƶ�˶������ݺ����ڵ�Ƶ�¿ɽ���Ϊһ��ģ�ͣ����Ӧ��Ƶ��Ϊ��
![]()
��ʽ��Ϊһ����Ӧģ�ͣ�Ҳ��Ұ��(Nomoto)���̣�������ץס����Ӧ���Ա��ʣ��ֱȶ����̸���
1.3 �ο�ģ��
�ں�����ٿ����У�ϣ�������������r���溽��仯���趨�ο��źŦף�һ�ּķ�����Ӧ��ģ�Ͳο��������������߽����òο�ģ�ͣ�
![]()
ʽ�У���n�ͦ��������ջ�ϵͳ��Ϊ����Ʋ�������Ϊ�趨����仯��ָ���źţ���rΪ��������Ĺ⻬�ο��켣���ο�ģ�Ϳ���Ϊ��ָ������ǵ�Ԥ�˲���Ԥ�˲��ɱ����������ź��������ֵ�ⷽ������ѡ����ܲο�����Ǧķ�ֵ�ı��ο�ģ�͵Ķ�̬���Ծ��봬����̬��ƥ�䡣
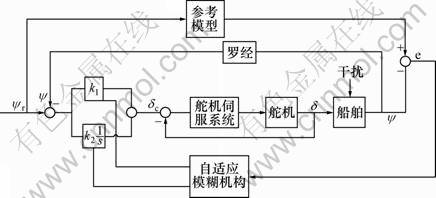
ͼ1 ����Ӧģ�����Ʋٶ�ϵͳ
Fig.1 Adaptive fuzzy control system
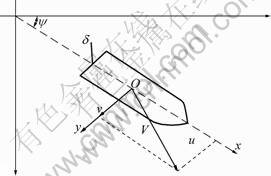
ͼ2 ����ƽ���˶�����ϵ
Fig.2 Ship plane motion co-ordinate
1.4 ����ŷ�ϵͳ
����ŷ�ϵͳ����2���綯Һѹת����ϵͳ��Һѹת���ŷ�����ϵͳ�ͷ�����ŷ�ִ����������ŷ�ϵͳ��������Դ���Զ���ʻ�ǣ�����Ϊ���Ʒ���ƫ���(��c)�������ʵ�ʴ����(��)��
2 �����������������
��ģ����������Ƶ�����Ӧ����[12]��ֻҪ����ϵͳ��ģ����Ϣ����ģ���������д�����ƹ���������Ϻ����Ŀ������á����⣬ģ���㷨�Ƚϼ���������ʵʱ���ƣ��ṩ��һ��ʵ������Ӧ���Ƶķ�����
2.1 ģ�Ͳο�����Ӧģ�������㷨
ģ�Ͳο�����Ӧģ�������ǽ�����Ӧ����ͨ��ģ���㷨��ʵ����ͼ1��ʾ��ͼ��k1��k2Ϊ�ɵ����������ģ�Ͳο�����Ӧģ���������Ĺؼ��������ģ������Ӧ��������Ʒ���������ƻ���ģ���������ķ�����ȫ��ͬ�������Ƚ���ȷ��ģ���������ͨ��ģ�����㣬�����ģ���о�������������
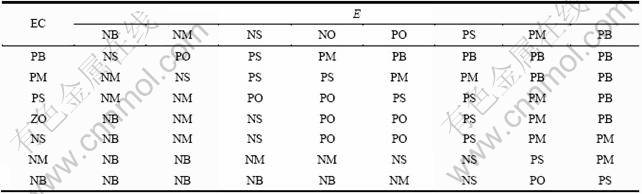
��1��2���зֱ�Ϊ�ٶ�ϵͳ�ɵ�����k1��k2�Ŀ��ƹ�����ƫ�ƫ��仯�Լ���Ӧ���ƹ�����ģ�������ϳɺ�ģ���о�����ɲ���k1��k2������Ӧ�������Ӷ�ʵ��ϵͳ������Ӧ��
��1 k1�������Ʊ�
Table 1 Control parameter for k1
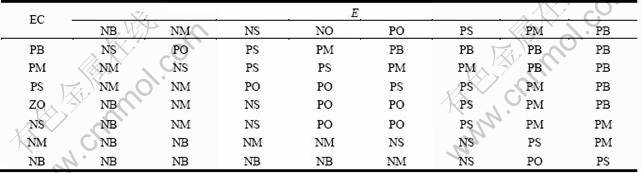
��2 k2�������Ʊ�
Table 2 Control parameter for k2
2.2 ����������Ա����������Ⱥ������趨
Ϊ���������ͨ���������ӣ��������������������ͳһΪ[-6��6]��
����������£�
(1) ����ƫ�e=��r-�ס����Ա���ȡֵ������(NB)������(NM)����С(NS)������(NO)������(PO)����С(PS)������(PM)������(PB)��
(2) ����ƫ��仯�ʣ�ec=de/dt�����Ա���ȡֵ������(NB)������(NM)����С(NS)����(ZO)����С(PS)������(PM)������(PB)��
�������Ϊ��k1��k2�����Ա���ȡֵ������(NB)������(NM)����С(NS)������(NO)������(PO)����С(PS)������(PM)������(PB)��
4�������������Ⱥ��������öԳơ����ȷֲ��������κ��������������������������������ͼ3��ʾ��
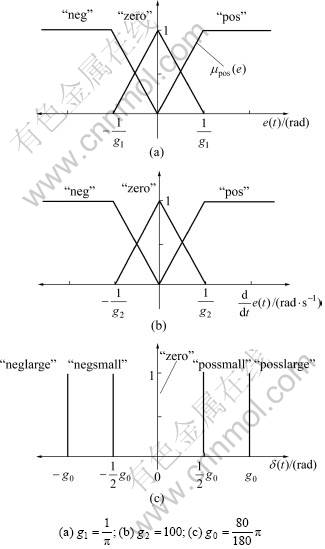
ͼ3 �������������������������
Fig.3 Membership functions for inputs and output
2.3 ģ�����ƹ�������
���ݾ����Ϊ�ḻ�Ĵ�����ʻ��Ա�������ݹ����������ܽ������Ȼ��Ϊ��ת��ģ�����ƹ���1��2���зֱ�Ϊ�����ٶ�ϵͳ�ɵ�����k1��k2�Ŀ��ƹ���
2.4 ģ����������ģ����
ģ����������Mamdani���㷨����ģ�����������ķ���
3 ϵͳ����
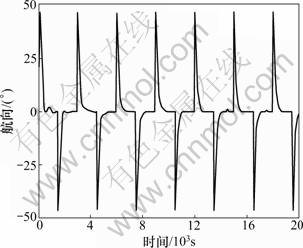
��������Զ���ż�װ�䴬shanghai��ʵ�����ݽ��з��棬��Matlab������Է����Դ����������ٿ���ϵͳ����������Ӧģ�����Ʒ��������з����о�������350 m������39.8 m�����س�ˮ15 m�������贬��Ϊ5 m/s����õ���ͼ4��9��ʾ�Ĵ����������ٿ��Ʒ�������
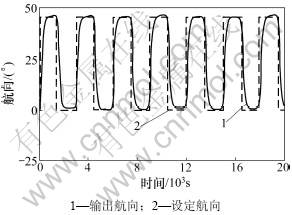
ͼ4 ���������ʷ����
Fig.4 Ship heading (sold) and desired ship heading (dashed)
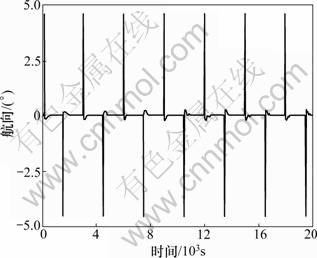
ͼ5 ��������ʷ����
Fig.5 Rudder angle
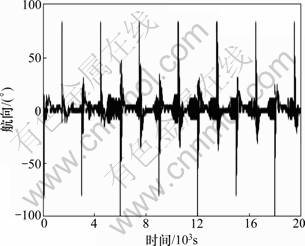
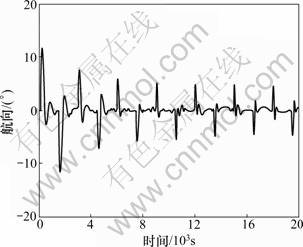
ͼ6 ����������趨����֮����ʷ����
Fig.6 Ship heading error between ship heading and desired heading
ͼ7 ƫ����
Fig.7 Change in ship heading error
ͼ8 ���������ο�ģ�ͺ���֮����ʷ����
Fig.8 Ship heading error between ship heading and reference model heading
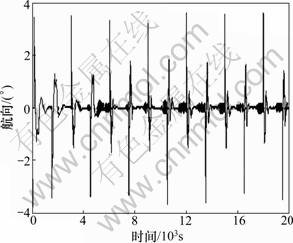
ͼ9 ƫ����(���������ο�ģ�ͺ���֮��)
Fig.9 Change in heading error between output and reference model
��ͼ4��ͼ5���Կ������ÿ���ϵͳ���нϺõĿ������ܣ�����ʹʵ���������(ʵ��)���Խ������������ĺ���ο��켣(����)������ʱ��϶̣�ʩ����������ϲٶ���ɡ���ͼ6��9���Կ�������������С�����н�ǿ����Ӧ�ԡ�
4 ����
���о���Ƶ�����Ӧģ�����ƴ���������ٿ�������Ϊ������������ṩ��һ����Ч�ķ����������о��Ľ����������ϵͳ���н�ǿ��³���Ժ����õ��ȶ��ԡ�
�ο����ף�
[1] Enab Y M. Intelligent controller design for the ship steering problem[J]. IEE Proc-Control Theory Application, 1996, 143(1): 17-24.
[2] Pacini P J, Kosko B. Adaptive fuzzy systems for target tracking[J]. Intelligent Systems Engineering, 1992, 1(1): 3-21.
[3] ��׳, ��¾�, ����. һ������ģ��-PID���ƺ����Զ���[J]. �������ӹ���, 1999, 6: 21-25.
MA Zhuang, WAN De-jun, HUANG Lin. A new fuzzy-PID controller for ship navigation[J]. Ship Electronic Engineering, 1999, 6: 21-25.
[4] �Ź�, �ι�. ����������PID�����Զ���������ʵ��[J]. �й��촬, 2007, 48(30): 44-48.
ZHANG Gui-chen, REN Guang. Design and implementation of self-tuning PID marine automatic steering[J]. Ship Building of China, 2007, 48(30): 44-48.
[5] ��Ծ��. �����Կ���ϵͳ������Ӧ��[M]. ����: ������ҵ������, 2002.
HU Yue-ming. Non-linear control system theory and application [M]. Beijing: National Defense Industry Press, 2002.
[6] ������. ���ܿ���[M]. ����: ���ӹ�ҵ������, 2005.
LIU Jin-kun. Intelligent control[M]. Beijing: Electronic Industry Press, 2005.
[7] Astrom K J, Wittenmark B. Adaptive control[M]. New York, US: Addison-Wesley, 1995.
[8] ������, ������. �����˶���ѧģ��[M]. ����: �������´�ѧ������, 1998.
JIA Xin-le, YANG Yan-sheng. Ship motion mathematic model[M]. Dalian: Dalian Maritime University Press, 1998.
[9] �Ź���. ģ�����Ƽ���MATLABӦ��[M]. ����: ������ͨ��ѧ������, 2002.
ZHANG Guo-liang. Fuzzy control and Matlab application[M]. Xi��an: Xi��an Jiaotong University Press, 2002.
[10] �����. �������������Ͳ���[M]. ����: ����ͨ������, 1999.
WU Xiu-hen. Ship maneuverability and seakeeping[M]. Beijing: China Communications Press, 1999.
[11] ������, ������. �����Զ�����Ƽ�����չ�о�[J]. ������Զ����������, 2000, 8(6): 2-4.
CHENG Qi-ming, LIU Qi-ming. The study on development of the control techniques on ship autopilot[J]. Computer Automated Measurement & Control, 2000, 8(6): 2-4.
[12] �. ģ������ԭ����Ӧ��[M]. ����: ��е��ҵ����, 1995.
ZHU Jing. Fuzzy control theory and application[M]. Beijing: Mechanical Industry Press, 1995.
(�༭ ����)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ���Ϻ����´�ѧ���л���������Ŀ(09-15)
ͨ�����ߣ�����ǿ(1984-)���У�ɽ���Ͳ��ˣ�˶ʿ�о��������´������ƹ����о����绰��13621775863��E-mail: 916916618@163.com
ժҪ������������������һֱ�Ǵ����˶����Ƶ���Ҫ�о�����֮һ�����봬�����еľ����ԡ���ȫ�Ժ�������������ء����ڴ����Ķ�̬���д���ԡ���ʱ�ͺͷ����Ե��ص㣬����ģ�Ͳ����㶯�Լ������˶��з硢�ˡ����������ŵ�Ӱ�죬ʹ�ÿ���������Ƴ�Ϊһ�����ӵ����⡣�о������������ٿ������⣬��������Ӧģ�����Ʒ�������ƴ����������ٿ�������Ӧ��Matlab���湤����һ��ģ�ʹ�Ϊ������ƵĿ��������м���������о�������������������ʵ�ʺ����ܹ����������������ﵽ�����Ч������֤����ƿ���������Ч�ԡ�
