
ʱ���������ϵͳ���������ģ��Ԥ�����
л����1����ά��2
(1. ���ݹ�ѧԺ ������Ϣ���������ѧԺ, ���� ���ݣ�213002��
2. �Ͼ�������ѧ �Զ���ѧԺ������ �Ͼ���210094)
ժ Ҫ��
��Լ���IJ�ȷ��ʱ���������ϵͳ�������������Ԥ��������⡣���Ǵ�����ʱ����������������ִ�����¼������Լ�������һ���������ڵIJ�ȷ��ʱ�ӣ���������״̬�۲������������ϵͳ����ģ�͡�����³��ģ��Ԥ��������ۣ����þ���ʽ�����Ƶ�����������Լ���ұջ�ϵͳ�����ȶ��ij�����������ڴˣ��ۺ������������Ԥ������ɡ���������˵���˱���������Ч�ԡ�
�ؼ��ʣ�
�������ϵͳ��³��ģ��Ԥ�����������ʽ���ȶ�����
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0370-06
Output feedback model predictive control for networked control systems with time-delay
XIE Cheng-xiang1, HU Wei-li2
(1. School of Electronic Information and Electric Engineering, Changzhou Institute of Technology,
Changzhou 213002, China;
2. School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)
Abstract: An off-line output feedback model predictive control scheme for a class of networked control systems (NCS) with input constraints and uncertain time-delay was studied. Considering time-driven sensors, event-driven actuators and the controller, and the uncertain time-delay no more than one sampling period, an augmented mathematic model for the NCS based on state observer was developed. According to robust model predictive control theory, matrix inequalities method was used to derive the sufficient condition of asymptotic stability of closed loop system for NCS and at the same time satisfy the input constraints. Based on this idea, the off-line output feedback model predictive control law was synthesized. The simulation example shows the effectiveness of the proposed technique.
Key words: networked control systems; robust model predictive control; matrix inequalities; stability
�����������ϵͳ���пɿ��Ըߡ������ǿ��ϵͳ�и���������ʵ����Ϣ��Դ�Ĺ������ŵ㣬Խ��Խ��Ŀ���ϵͳ�����˿������缼������ͨ���������뵽����ϵͳ�У����ɱ���ص�����Ϣ�ڴ�������ִ�����Ϳ�����֮�䴫��ʱ�����˲�ȷ��ʱ�ӣ��Ӷ�������ϵͳ�����ܣ�����ʹϵͳ���ȶ������ڲ�ͬ��ʱ�����ԣ��ɲ��ò�ͬ�ķ�������Ʒ���[1-3]��
��ʵ�ʵ��������ϵͳ�У��������ڲ�ȷ��ʱ�ӣ����ҿ���������������һ����Լ����ͬʱ�����ڻ�������������Լ����ʱ���ܲ�����ϵͳ��ȫ��״̬��Ϣ����ֻ�ܵõ�������Ϣ���Դˣ���ռ֥���о��˶�ʱ������¶�̬�������NCS��³���������� ��[4]�������ܿ��������[5]�Լ����ڹ۲�����NCS³�����������[6]�����⣬����������Լ����NCS���о��в������
ģ��Ԥ������ܽϺõش��������е�Լ�����⣬��ˣ���������������Դ�����ʱ����������������ִ�����¼�������������Լ���Ķ�ʱ���������ϵͳ���о����ڹ۲�����³��ģ��Ԥ��������⣬������³��Ԥ������ɴ��ڵ��������ڴ˻����ϣ���������[8]��˼·���ۺ��������������ģ��Ԥ������ɣ���ͨ������������֤�˱��ķ�������Ч�ԡ�
1 �������NCS����ѧģ��
��u��y�ֱ��ʾ���ض���Ŀ���������������k���������ڴ�������������֮��������յ�ʱ�Ӽ�Ϊ![]() ����������ִ����֮��������յ�ʱ��Ϊ
����������ִ����֮��������յ�ʱ��Ϊ![]() ��ϵͳ�и��ڵ��豸�����ݴ���ʱ�ӿɲ�����������ʱ���С�Ϊ�������㣬���裺(1)������ʱ������, ������T���������(2)��������ִ�������յ�������Ϣ�������Ϣ����������Ӧ�IJ�����(3)���ݵ�������, ��ʱ����ҺͰ���ʧ��(4)�����ջ���·�������յ�ʱ�Ӽ�Ϊ
��ϵͳ�и��ڵ��豸�����ݴ���ʱ�ӿɲ�����������ʱ���С�Ϊ�������㣬���裺(1)������ʱ������, ������T���������(2)��������ִ�������յ�������Ϣ�������Ϣ����������Ӧ�IJ�����(3)���ݵ�������, ��ʱ����ҺͰ���ʧ��(4)�����ջ���·�������յ�ʱ�Ӽ�Ϊ![]() ��
��![]() ��
��![]() ��ȷ��, ����
��ȷ��, ����![]() ��T��(5)�����ǹ��̸��źͲ���������
��T��(5)�����ǹ��̸��źͲ���������
�������ϼ��裬���ض���ɱ�ʾΪ
![]() (1)
(1)
���У�x(t)![]() RnΪ���ض����״̬��u(t)
RnΪ���ض����״̬��u(t)![]() RrΪ��������������Լ��|uj|��uj,max��j=1, 2, ��, r��y(t)
RrΪ��������������Լ��|uj|��uj,max��j=1, 2, ��, r��y(t)![]() RmΪ���ض���������A��B��CΪ��ά��������
RmΪ���ض���������A��B��CΪ��ά��������
���ǵ���k![]() [0, T]����������u(t)��һ�����������ڷֶ���������������Ϊ��
[0, T]����������u(t)��һ�����������ڷֶ���������������Ϊ��
![]() (2)
(2)
��ˣ����ض������ɢ��ģ�Ϳɱ�ʾΪ��
![]() (3)
(3)
���У�Ad=eAT,![]() ��D��EΪ��������
��D��E��������
F(��k)���kʱ��������FT(��k)F(��k)��I��D, E��ȡֵ�ο�����[7]��
������[4-6]������ģ����ȣ�����ģ�͵ı����ʽ(������ȷ����ʱ)���������յ�ʱ��Ϊ0ʱ�ı��ض���ģ�ͣ��������������ȷ������ɿ���һ����Եõ���֤������[4-6]�����ñ��ģ�Ͳ��ɿأ��ʲ������ڿ������ȶ�ϵͳ��
�����ܵõ�ϵͳ�������Ϣʱ���ɹ���״̬�۲������ع�ϵͳ��״̬�������ع���״̬��ʵ��״̬�������ơ�����[Ad, C]�ɹ۲⣬�����ϵͳ����״̬�۲������£�
![]() (4)
(4)
���У�![]() �ǹ۲�����״̬��
�ǹ۲�����״̬��![]() �ǹ۲�������������������
�ǹ۲�������������������
ȡ������Ϊ
![]() (5)
(5)
��ɵ���������������ϵͳ�ıջ�����Ϊ
 (6)
(6)
2 ³��Ԥ����������
������ʵ״̬���ܾ�ȷ��֪�������ù۲���״̬����������ʱ������ָ�꣺
![]()
![]() (7)
(7)
���У�![]() ��ʾ����
��ʾ����![]() ��k+iʱ�̵Ĺ۲���Ԥ��״̬��
��k+iʱ�̵Ĺ۲���Ԥ��״̬��![]() ��kʱ�̵�i��Ԥ����ơ�
��kʱ�̵�i��Ԥ����ơ�
���ù۲�״̬���췴�������ɣ�
![]() (8)
(8)
��ʱ���������ģ��Ԥ����������ת��Ϊ������µ���С�����⣺
![]() (9)
(9)
s.t. ![]()
![]()
![]() (10)
(10)
![]() (11)
(11)
�ڿ�����ʽ(8)�����£��ջ�ϵͳ���̿��Ա�ʾΪ��
 (12)
(12)
���� ��
��
����1[9]����M��N��FΪ�����ʵ�ά����ʵ��������F����FTF��I����ô���ڳ�����>0��ʹ��
![]()
����1����![]() ��ϵͳ�ڲ���kʱ�̵Ĺ۲���״̬��ϵͳ���÷���������ʽ(8)��ʹ��ϵͳʽ(12)�����ȶ���ʹ������ָ��ʽ(7)��С�ij�������Ǵ��ڶԳ���������X��Y��������>0�ͦ�>0���������ʽԼ�����Ż����⣬����
��ϵͳ�ڲ���kʱ�̵Ĺ۲���״̬��ϵͳ���÷���������ʽ(8)��ʹ��ϵͳʽ(12)�����ȶ���ʹ������ָ��ʽ(7)��С�ij�������Ǵ��ڶԳ���������X��Y��������>0�ͦ�>0���������ʽԼ�����Ż����⣬����
![]() (13)
(13)
s. t.
 (14)
(14)
![]() (15)
(15)
 (16)
(16)
![]() (17)
(17)
����

![]()
֤������������ͺ���
![]() (18)
(18)
����
![]() ��
��
��Lyapunov������֪���ջ�ϵͳʽ(12)�����ȶ��ij��������
![]() (19)
(19)
��ʽ(12)��(18)����ʽ(19)���ɵ�
![]() (20)
(20)
��Schur��������ʽ(20)�ȼ���
![]() (21)
(21)
����
���ǣ�ʽ(21)����д��
![]() (22)
(22)
������1��Ҫʹʽ(22)������ֻҪ���������ţ�ʹ�ò���ʽ
![]() (23)
(23)
����������Schur������1������X=��P-1����=�æţ�ʽ(23)�ȼ���ʽ(18)����ʽ(18)�����DZջ�ϵͳʽ(12)�����ȶ��ij��������
�ٶ�������ͺ���
![]()
��ʩ�����µ�Լ����
![]()
![]() (24)
(24)
��Ȼ�����ջ�ϵͳʽ(12)�����ȶ�ʱ��![]() ��
��![]() ����ˣ���ʽ(24)��i=0��i=�����ۼӣ��õ�
����ˣ���ʽ(24)��i=0��i=�����ۼӣ��õ�![]() ����
����
![]() (25)
(25)
����Schur����������![]() ����ɵõ�ʽ(15)��
����ɵõ�ʽ(15)��
Ӧ��ʽ(10)��Լ��ʽ(24)�ȼ���
![]() (26)
(26)
���У�![]() ������������ʽ(26)��ʡ��
������������ʽ(26)��ʡ��![]() ��(�ȼ��ڽ��ڿ���������ʱ������״̬�۲����ļ���)[7]������ʽ(26)�ȼ���
��(�ȼ��ڽ��ڿ���������ʱ������״̬�۲����ļ���)[7]������ʽ(26)�ȼ���
![]()
![]() (27)
(27)
����Schur��������ʽ(27)�ȼ���
![]() (28)
(28)
ʽ(28)����д��
![]()

������Schur����������ʽ�ȼ���
 (29)
(29)
����ʽ(29)�Ƿ����Ծ���ʽ���������ñ���������������ʽ(29)��ˡ��ҳ�![]() ����
����![]() ��ɵõ�ʽ(21)��
��ɵõ�ʽ(21)��
�������о�����Լ���Ĵ�������������[10]�еķ���������
![]()
��ϵͳʽ(10)�IJ��伯�����ԣ����ڵ�j�����Ʒ�����Ӧ��Cauchy-Schwarz����ʽ����
![]()
�����������ڶԳƾ���U��![]() ����ʽ(17)
����ʽ(17)
����Ա�֤![]() ��[֤��]
��[֤��]
�������Ƶ���֪������ʽ(14)��֤�˱ջ�ϵͳ�����ȶ���ʽ(15)ȷ��������ָ����Ͻ磬ʽ(16)��֤![]() ����״̬�۲����ʱ�ĵ����ݼ��ԣ�ʽ(17)Լ��ʹ�ÿ������Ĵ�С�ڹ涨�ķ�Χ�ڡ�
����״̬�۲����ʱ�ĵ����ݼ��ԣ�ʽ(17)Լ��ʹ�ÿ������Ĵ�С�ڹ涨�ķ�Χ�ڡ�
����1���Ż�������˫���Ծ���ʽ(BMIs)Լ�����Ż����⣬������MATLAB����������PENBMI���������[11]�������ʱ����������������ʹ�ã�Ϊ�ˣ����Ǹ����������ϵͳ�������������ģ��Ԥ������㷨��
�㷨1�������������ģ��Ԥ������㷨
(1) ���ߵأ�ѡ��״̬��![]() ��i
��i![]() {1, ��, N}��
{1, ��, N}��![]() �滻ʽ(15)�е�
�滻ʽ(15)�е�![]() (k|k)�����ʽ(13)���õ���Ӧ�ľ���Yi���������������Ki������
(k|k)�����ʽ(13)���õ���Ӧ�ľ���Yi���������������Ki������![]() ��ע��
��ע��![]() ��ѡ��Ӧ��ʹ��
��ѡ��Ӧ��ʹ��![]() ��
��
(2) ���ߵأ��ڳ�ʼʱ��k=0��ȷ��![]() ��i=i0��
��i=i0��
��![]() Ȼ�����Ȳ���
Ȼ�����Ȳ���![]() ��
��
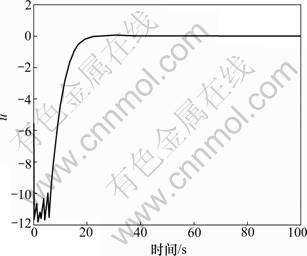
(3) ���ߵأ���ÿ��k>0ʱ�̣����� ���ڸ��㷨�������½��ۣ� ����2 ������ʽ(3)��ʽ(5)��������ϵͳ�����������������������ģ��Ԥ������㷨���ջ�ϵͳ�����ȶ��ij�������� ֤�������ݶ���1������ ����������ԭ�㡣[֤��] 3 �������� ����һ���������ȶ��ı��ض��� ���贫�����ڵ�IJ�������T=0.5 s�������е���Ϣ������ʱ�Ӧ�k ȡ����ָ�����ΪQ=I��R=1��L= [0.173 2 0.340 2]��ʹ��Ad-LC�ļ���Ϊ0.7��0.8��ѡ�� ͼ1 �ջ�ϵͳ��״̬�켣ͼ Fig.1 State trajectories of closed-loop system ͼ2 ���������ź� Fig.2 Control input signal 4 ���� �������һ���������Լ���IJ�ȷ��ʱ���������ϵͳ���ڽ��ܻ�ñ��ض��������Ϣ�������£�ͨ������۲������ع�ϵͳ��״̬��Ϣ�����ù۲�״̬��������ָ�꺯�����ۺ����������ģ��Ԥ����ơ��Ծ���ʽ����ʽ������ʹ�ñջ�ϵͳ�����ȶ�����������ӲԼ��������ʱ������ָ�꼫С�ij��������ͨ��������ʽ�ɵõ��������ģ��Ԥ������ɡ����ĸ����Ŀ��Ʒ�������˾�������Լ���IJ�ȷ��ʱ���������ϵͳ���������Ԥ����Ƶ��ȶ����ۺ����⡣ �ο����ף� [1] Lian F L, Moyne J, Tilbury D. Modeling and optimal controller design of networked control systems with multiple delays[J]. International Journal of Control, 2003, 76(6) : 591-606. [2] Xie L, Zhang J M, Wang S Q. Stability analysis of networked control system[C]//Proc of the First International on Machine and Cybernetics. Beijing, 2002: 757-759. [3] ������, �ܴ�, ��ά��. ��ʱ���������ϵͳ��³��H2/H��״̬�۲������[J]. ���������, 2005, 20(3): 280-284. [4] ��ռ֥, ������. ��̬��������������ϵͳ³�����������[J]. ϵͳ����ѧ��, 2007, 22(2): 176-180. [5] ��ռ֥, ������, ����. ��ȷ��ʱ������������绯ϵͳ�����ܿ���[J]. ����������Ӧ��, 2007, 24(2): 274-278. [6] ��ռ֥, ������. һ����ڹ۲������������ϵͳ³�����������[J]. ���������, 2007, 22(10): 1165-1169. [7] л����, ������, ��ά��. һ���ʱ���������ϵͳ�Ľ�ģ�Ϳ��Ʒ���[J]. �Ͼ�������ѧѧ��, 2009, 33(2): 156-160. [8] ������, ����. Լ��ʱ�䲻ȷ����ɢϵͳ���������Ԥ������ۺ�[J]. �Զ���ѧ��, 2007, 33(1): 78-83. [9] ����. ³������-���Ծ���ʽ��������[M]. ����:�廪��ѧ������, 2002: 87-88. [10] Kothare M V, Balakrishnan V, Morari M. Robust constrained model predictive control using linear matrix inequalities[J]. Automatica, 1996, 32(10): 1361-1379. [11] Henrion D, Lofberg J, Kocvara M, et al. Solving polynomial static output feedback problems with PENBMI[C]//Proceedings of 44th IEEE Conference on CDC-ECC��05. 2005: 7581-7586. (�༭ ���) �ո����ڣ�2011-04-15�������ڣ�2011-06-15 ������Ŀ��������Ȼ��ѧ����������Ŀ(60964004) ͨ�����ߣ�л����(1970-)���У����յ�ͽ�ˣ���ʿ�����ڣ������������ϵͳ��Ԥ����Ƶȷ�����о��� �绰��13921592720��E-mail: xiechx701008@163.com![]() �����������������㣬����������������Ҫ��
�����������������㣬����������������Ҫ��![]() �л���
���![]() (i��
(i��![]() (30)
(30)![]() ��
��![]() ��ʹ�ñջ�ϵͳ�����ȶ������ԣ�����������n0��ʹ��
��ʹ�ñջ�ϵͳ�����ȶ������ԣ�����������n0��ʹ��![]() ��Ӧ����n0�κ�ʽ(30)�Ԧ�=0��i1��N���㣬��
��Ӧ����n0�κ�ʽ(30)�Ԧ�=0��i1��N���㣬��![]() ����ʱ����
����ʱ����![]() ��
��![]() ��ȡ�������Ƶأ����ʵ���ʱ����
��ȡ�������Ƶأ����ʵ���ʱ����![]() ��ȡ��
��ȡ��![]() ���Դ����ƣ��������״̬
���Դ����ƣ��������״̬
![]() [0, 0.5 s]������ʱ�䡢��ȷ���ģ��������ڵ��ִ�����ڵ�������¼�������������������|u|��12����������[7]�ṩ�ķ�����ȡ��1=0.512 7����2= 0.398 0������ֵ��1=0.1����2=-0.95���Ӧ���ɵã�
[0, 0.5 s]������ʱ�䡢��ȷ���ģ��������ڵ��ִ�����ڵ�������¼�������������������|u|��12����������[7]�ṩ�ķ�����ȡ��1=0.512 7����2= 0.398 0������ֵ��1=0.1����2=-0.95���Ӧ���ɵã�![]()
![]()
![]()
![]()
![]() ��ai=15��14��12��10��8��5��3��2��bi=5��4.5��4��3.5��3��2.5��2.1���õ�������������K1��K8��Ȼ��ѡ��ѡ���ʼ״̬Ϊ
��ai=15��14��12��10��8��5��3��2��bi=5��4.5��4��3.5��3��2.5��2.1���õ�������������K1��K8��Ȼ��ѡ��ѡ���ʼ״̬Ϊ![]() ��
��![]() �������㷨1���ɵñջ�ϵͳ�Ĺ۲�״̬��ʵ��״̬��ͼ1��ʾ��ͼ2��ʾ����Ӧ�Ŀ��������źš�
�������㷨1���ɵñջ�ϵͳ�Ĺ۲�״̬��ʵ��״̬��ͼ1��ʾ��ͼ2��ʾ����Ӧ�Ŀ��������źš�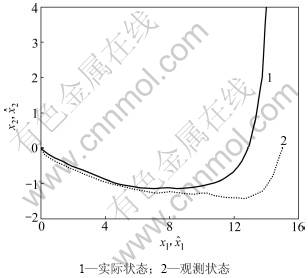
ZHU Zhang-qing, ZHOU Chuan, HU Wei-li. Design of robust H2/H�� states observer for networked control systems with short time-delay[J]. Control and Decision, 2005, 20(3): 280-284.
QIU Zhan-zhi, ZHANG Qing-ling. Robust controller design for dynamic output feedback networked control systems with uncertain time-delay[J]. Journal of System Engineering, 2007, 22(2): 176-180.
QIU Zhan-zhi, ZHANG Qing-ling, LIU Ming. Guaranteed performance control for output feedback networked control systems with uncertain time-delay[J]. Control Theory and Application, 2007, 24(2): 274-278.
QIU Zhan-zhi, ZHANG Qing-ling. Robust controller design for a class of networked control systems based on state observer[J]. Control and Decision, 2007, 22(10): 1165-1169.
XIE Cheng-xiang, FAN Wei-hua, HU Wei-li. Modeling and control method of a class of networked control systems with short time-delay[J]. Journal of Nanjing University of Science and Technology, 2009, 33(2): 156-160.
DING Bao-cang, ZOU Tao. Synthesizing output feedback predictive control for constrained uncertain time-varying discrete systems[J]. ACTA Automatica Sinica, 2007, 33(1): 78-83.
YU Li. Robust control-linear matrix inequalities method[M]. Beijing: Tsinghua University Press, 2002: 87-88.
ժҪ���о�һ���������Լ���IJ�ȷ��ʱ���������ϵͳ�������������Ԥ��������⡣���Ǵ�����ʱ����������������ִ�����¼������Լ�������һ���������ڵIJ�ȷ��ʱ�ӣ���������״̬�۲������������ϵͳ����ģ�͡�����³��ģ��Ԥ��������ۣ����þ���ʽ�����Ƶ�����������Լ���ұջ�ϵͳ�����ȶ��ij�����������ڴˣ��ۺ������������Ԥ������ɡ���������˵���˱���������Ч�ԡ�
