
�����ͳ�������������ģ
����ƽ, �� ��
(���ϴ�ѧ ���繤��ѧԺ, ���� ��ɳ, 410083)
ժ Ҫ��
����ģ�����о������ͳ�������������ʱ������������������, ���һ������˫���Ӹ����ͳ�������; ��������ĶԳ��Խ����˶���������������ģ��; ����������������Ķ���ͬʱ����Hamilton����, �Ƶ��˿������������ЧӦ�Ķ������������ַ����붯���߽�����; ����Maple�����Զ����˶��ַ��̽������, ����˶�����������Ƶ��; ��������Ԫģ����һά����ģ�ͶԶ��ӵ���������Ƶ�ʽ��жԱȼ���, ��������ԭ�ͻ��Ĺ���Ƶ�ʽ��вⶨ�� �о��������: ����ģ�ͱ�һά����ģ�;��и��ߵķ�������; ���������ʵ��ֵ������Ԫ����ֵ�Ǻϡ�
�ؼ���: ��������; ѹ���մ�; ����Ƶ��; ������; ������
��ͼ�����:TM356 ���ױ�ʶ��:A ���±��: 1672-7207(2005)03-0452-06
Modeling of longitudinal vibration of hybrid ultrasonic motor
YI You-ping, ZHONG Jue
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: One-dimensional model will lead to analytical error when the vibration characters of hybrid ultrasonic motor are considered. A new type of hybrid ultrasonic motor with 2 stators was developed. Considering the symmetrical properties of this motor, a physical model for longitudinal vibration analysis of the stator was established. By introducing the kinetic energy of the vibrations in longitudinal and transversal directions into the Hamilton equation, the differential equation for longitudinal vibration analysis and the dynamical boundary conditions were deduced, in which the transversal vibration effect was considered. The Maple software was used to solve these differential equations and the eigenfrequency of longitudinal vibration for the stator was obtained. For the purpose of comparison with the refined theoretical model, a finite element model and a one-dimensional model were used to compute the eignefrequency of longitudinal vibration. Furthermore, the eignefrequency of this motor prototype was measured in the experiment. The research results show that the theoretical model proposed has much higher accuracy than one-dimensional model. The analytical results agree well with the experimental results and the calculted results obtained by the finite element method.
Key words: ultrasonic motor; piezoceramic; eigenfrequency; longitudinal vibration; transversal vibration
����������һ������ѹ���մɵ���ѹ��ЧӦʵ�ֻ�������ת������������, ���������е��ٴ�Ť�ء� ��Ӧ�졢 �������Ժá� ���ܴų�Ӱ�켰�˶�ȷ����������, �ں��պ��졢 �����ˡ� �ͻ�е���Զ����Ƶ�������й�����Ӧ��ǰ��[1-3]��
�����ͳ���������һ���ݡ�Ť������֮����ϵͳ, ������������ѹ���մ�(PZT)�������, 2�������ڶ����зֱ�2����������ģ̬, ��������PZT����ʹ���Ӳ���Ťת��ģ̬, ͨ������ ת�Ӽ��Ħ��������ת���˶�; ����PZT���Ӳ���������ģ̬, ���ƶ��� ת�Ӽ��Ħ����, ��˫��Ťת��ת��Ϊת�ӵĵ����˶�[4,5]�� ���ڸ����ͳ���������в��ͳ���������и����������غ��õĵ����ȶ���, �Է��������ڳ��������о������ܵ�������ѧ�ߵ��ձ��ע[6-13]�� Ȼ��, �����ͳ�������ֻ��10����ķ�չ��ʷ, �������������ϵ��������, Ŀǰ��������������ģ�Ͷ�����һά����, �������ĺ�����α�����[14-18]�� ��ʵ��, �����ͳ��������Ѳ���ֻ��ϸ����, ������һά���۵���������, ���, �����ͳ�������������������ģ���д���һ���о��� Ϊ��, ���������һ��˫���Ӹ����ͳ�������, �乤��ԭ����S.Ueha����Ƶĵ����Ӹ����ͳ�����������[2], ��ͬ������������ĸ��������ﺬ��2������, ���ڶ����������2��֧�Ż��� ��Բ���һά����ģ�ͷ��������ͳ��������������д��ڵ�����, ��������ĶԳ��Խ���������������������ģ��; ����Hamiltonԭ���Ƶ��������������ЧӦ�Ķ��������������ַ����붯���߽�����; ��������Ԫģ����һά����ģ�ͶԶ��ӵĹ���Ƶ�ʽ��м���, ��������ԭ�ͻ��Ĺ���Ƶ�ʽ��в��ԡ�
1 ����������ģ������ϱ�������
˫���Ӹ����ͳ�������Ϊ�Գƽṹ, ת�ӵĺ�Ƚϱ�, ��������������ģ�͵ı߽����Ϊһ�˹̶��� һ�����ɡ� ���ڶ����м������ݡ� Ť�������, ����������ģ�Ϳ���ͼ1��ʾ������,uiΪ�ֲ�����zi�����λ�ơ�
������ѹ�����ۿ�֪, ��Ӧ��S�͵糡ǿ��EΪ�Ա�������������PZT���ϵı�������Ϊ:
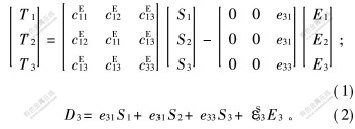
����: TiΪӦ������; SiΪӦ�����; DiΪ��λ�Ʒ���; cEijΪ�㶨�糡�µĵ��Գ���; eijΪѹ��Ӧ������; ��SijΪ�㶨Ӧ���µĽ�糣����
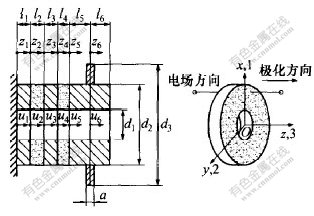
ͼ 1 ����������������ģ��
Fig. 1 Physical analysis model of longitudinal
vibration of stator
���Ծ���Ӧ��, ��T1=T2=0, ��ʽ(1)��(2)��Ϊ:
��һ���õ���������PZT���ϵı�������Ϊ:

�ڷ���������ʱ, ����б�����PZT�������Ӧ��Ϊ:
![]()
���ں���б�����PZT, ͬ������T2=T3=0, �õ����й�ϵʽ:
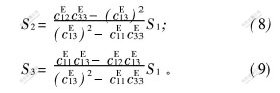
������(8)��(9)���뷽��(7)��:

����: Y4Ϊ����б�����PZT�ĵ���ģ����
2 ������������ģ��
2.1 �������ַ��̵�ͨ����ʽ
����������������ģ��(ͼ1), Hamilton���̾���������ʽ:
![]()
����: [AKT^]iΪϵͳ�Ķ���; [AKH^]iΪϵͳ����; ��WiΪ����ϵͳ�����鹦��
һά����ֻ�����˲��ϵ��������, �����Ӻ����ϴ�ʱ, Ϊ��þ�ȷ����������ģ��, Ӧ�����侶����Ρ� ��ͼ1��ʾ������ϵ��֪, ����������һ����ٶ�ʸ���ɱ�ʾΪ:
![]()
����: u��ʾλ��; (�B)��ʾ��ʱ����
��S1=S2, ��ϵͳ�Ķ��ܱ���ʽΪ:
����: IpΪ�����Ծ�; AΪ���Ӻ�����; ��<sub>LiΪ���Ӳ��ϵ������ܶȡ� �����ת�뾶ip,��Ip=i2pA, ����(13)�ɽ�һ����Ϊ:
���ݲ��ϱ�������(1), (2)�Լ�������������ģ��, ��������������ЧӦ��ϵͳ���ܹ�ϵʽ���¡�
����������PZT,��:

����������,��:
����: ��iΪ���ɱ�; (��)��ʾ�������ƫ������
��������PZT����Ϊ:
![]()
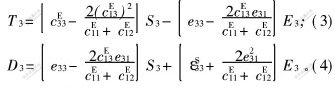
�����ϱ�������(3)��(4)����ʽ(17), ��:

���Բ�����Ť����PZT����Ϊ:

�ڶ�·������, ����ϵͳ�������鹦��Wi=0��
����������(15), (16), (18)��(19)����Hamilton����(11)��������:

���ݷ���(20),�ɵõ������������ַ���Ϊ:
��г��������, ��������������ʽ:u(z,t)=U(z)��ej��t,E3(z,t)=E3(z)��ej��t,��(t)=�ա�ej��t,D3(t)=D3��ej��t,���뷽��(21)��(22)��:
![]()
��Ϊ��Ƶ�ʡ�
����(23)��ͨ����ʽΪ:

����: C1i��C2iΪ�������ֳ���, ������ı߽�����������������ȷ����
2.2 �߽�����
�ɶ�����������ģ�Ϳ�֪, ���������߽�����Ϊһ�˹̶��� һ������, ���,�������¹�ϵʽ:
U1(0)=0;(25)
U6��(l6)=0��(26)
��������������, �ڽ���z1=l1, z2=l2, z3=l3, z4=l4��z5=l5��, λ���������з���:
Ui(li)=Ui+1(0), i=1,��,5��(27)
�ڽ���z5=l5��, ���������˵�����, ���ӵ�����m��ʹ�ý��������������F�����仯, ���Ŀ����ڷ����б�����, �������������� ������������ͼ2��ʾ��
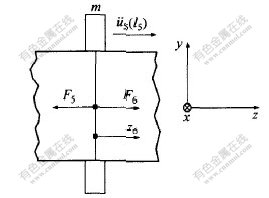
ͼ 2 ����z5=l5�Ķ����߽�����
Fig. 2 Dynamical boundary condition on
cross section z5=l5
��ţ�ٶ��ɿɵý���z5=l5���Ķ�����������Ϊ:
Y5AU5��(l5)-Y6AU6��(0)=m��2U5(l5)��(28)
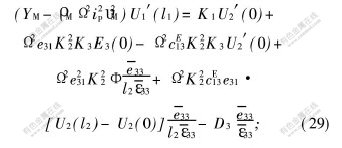
�ɷ���(20)�õ����¶��Ӹ�����Ķ�������������
a. ������1��2�����Ӵ�:
b. ������3��4�����Ӵ�:
c. ������4��5�����Ӵ�:
(YM-��M��2i2p��2M)U3��(l3)=(Y4-��4��2i2p��24)U4��(0);(31)
d. ������4��5�����Ӵ�:
(YM-��M��2i2p��2M)U5��(0)=(Y4-��4��2i2p��24)U4��(l4)��(32)
����:YM��ʾ���Բ��ϵĵ���ģ��; ��MΪ���Բ��ϵIJ��ɱ�; ��MΪ���Բ��ϵ������ܶȡ�
����(24)��12�����ֳ���, ��ͨ��12���߽���������(25), (26), (27)(��5���߽���������), (28), (29), (30), (31)��(32)��⡣
3 ��������Ƶ�ʷ���
�������������ַ���ͨ����������������붯���߽�����, �ɵõ��������ַ�����ı�����ʽ:
AC=r��(33)
����: AΪϵ������; CΪ���ֳ�������; C=(C11, C12, C21, C22, ��, C61, C62); rΪ��������
����(33)���з����ı�Ҫ����Ϊ:
det(A)=0��(34)
����(34)��Ϊ������Ƶ�ʷ���, ͨ���÷��̿��Զ�˫���Ӹ������������������ṹ�����Ż��� �����ӵIJ��ϲ���(��1)����������Ƶ�ʷ���, ����Maple�������þ��̡�
Ϊ��֤������ģ�͵ľ�ȷ��, �ֱ����һά����ģ�͡� ����Ԫģ�ͶԶ��������������ۼ���,ͬʱ��������������ʵ���о�, �ⶨ�˶��ӵ�������Ƶ�ʡ� ��Աȷ��������ͼ3��ʾ��
���ñ��ĵľ�ȷģ�ͼ���õ��ĵ�һ����Ƶ��Ϊ20.5 kHz, ʵ�����ֵΪ19.48 kHz, ����Ԫ����ֵΪ20.75 kHz, һά����ģ�͵ļ�����Ϊ22.8kHz�� ��Ȼ, �ڽ�ģ������,���ڿ����˶��ӵĺ������,ģ�ͼ���ֵ��ʵ�ʽ����Ϊ�ӽ��� ���Ľ����Ķ���������������ģ�͵ľ��ȸ���һά����ģ��, ����������ʵ�������Լ�����Ԫ����Ǻϡ�
�� 1 ������ϲ���
Table 1 Material parameters of motor 
1��ʵ����; 2����ȷģ�ͽ��;
3������Ԫģ�ͽ��; 4��һά����ģ�ͽ��
ͼ 3 ������һ����Ƶ�����۷������
��ʵ����
Fig. 3 Analysis and experiment results for the
first order eigenfrequency of longitudinal vibration
4 �� ��
a. ����������ĸ����ͳ�������ĶԳ����Լ��ݡ� Ť������ص�, �����˶���������������ģ����߽�������
b. ����������������Ķ���ͬʱ����Hamilton����, �Ƶ��˿������������ЧӦ�Ķ���������������ģ��, ����Maple�����Զ�����������ģ�ͽ�����⡣
c. ������������ģ�ͱ�һά����ģ�;��и��ߵķ�������, ���������ʵ��ֵ������Ԫ����ֵ�Ǻϡ�
�����:
[1]Sashida T, Kenjo T. An introduction to ultrasonic motors[M]. Oxford: Clarendon Press, 1993.
[2]Ueha S, Tomikawa Y. Ultrasonic motors����theory and applications[M]. Oxford: Clarendon Press, 1993.
[3]Wallaschek J. Piezoelectric ultrasonic motors[J]. Journal of Intelligent Material Systems and Structures, 1995,6(1): 71-83.
[4]Nakamura K, Kurosawa M, Ueha S. Design of a hybrid transducer type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1993, 40(4): 395-401.
[5]Nakamura K, Kurosawa M, Ueha S. Characteristics of a hybrid transducer-type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1991, 38(3): 188-193.
[6]�����, ����. ��Ť�����ͳ������Ԥѹ�������Ť�صĹ�ϵ[J]. Ħ��ѧѧ��, 2001, 21(1): 51-54.
SUN He-min, GUO Hui. The relation of pre-pressure and output-torque of longitudinal and torsional ultrasonic motor[J]. Tribology, 2001, 21(1): 51-54.
[7]Satonobu J, Friend J, Nakamura K, et al. Numerical analysis of the symmetric hybrid transducer ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferro-electrics and Frequency Control, 2001, 48(6): 1625-1631.
[8]Kurosawa M, Ueha S. Hybrid transducer type ultrasonic motor[J]. IEEE Transactions on Ultrasonics, Ferro-electrics and Frequency Control, 1991,38(3): 89-92.
[9]Tomikawa K, Adachi M, Aoyagi T, et al. Some constructions and characteristics of rod type piezoelectric ultrasonic motors using longitudinal and torsional vibrations[J]. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 1992, 39(5): 600-608.
[10]Aoyagi M, Tomikawa Y. Improvement in performance of longitudinal and torsional vibrator combination-type ultrasonic motor[J]. Jpn J Appl Phys, 1999, 38(5B): 3342-3346.
[11]Takahashi S. Multilayer piezoelectric ceramic actuators and their applications[J]. Jpn J Appl Phys, 1985, 24(2): 41-45.
[12]������.����ʽѹ�糬��Ťת�����������[J].ѹ��������,1994,16(1):24-28.
LIN Shu-yu. Design of piezoelectric ceramic ultrasonic trosional sandwich transducers[J]. Piezoelectrics & Acoustooptics, 1994,16(1):24-28.
[13]����ѵ,κ�ඨ,������,��.��Ť�����ͳ��������ѹ�����ӵ����[J].ѹ��������,2000,22(5):341-344.
GUO Hai-xun, WEI Yan-ding, GUO Ji-feng, et al. The devign of the piezoelectric vibrator of the congitudinal-torsional composite USM[J]. Piezoelectrics & Acoustooptics, 2000, 22(5): 341-344.
[14]Aoyagi M, Tsuchiya S, Murasawa Y. Trial production of an ultrasonic motor using longitudinal and torsional vibrations of a rod vibrator driven by piezo-ceramic plates inserted in its axial direction[J]. Jpn J Appl Phys, 1997, 36(9B): 6106-6109.
[15]Ԭ����, ������, ������,��. ����Ť�ݸ����ͳ����������ѧģ�͵�ģ�����[J]. ѹ��������, 2002, 24(4): 318-322.
YUAN Shi-ming, JIANG Kai-li, QU Jian-jun, et al. A dynamic model of longitudinal and torsional hybrid type ultrasonic motor[J]. Piezoelectrics and Acoustooptics, 2002, 24(2): 318-322.
[16]����, ����, ʱС��. ��Ť�����������ѧģ��[J]. ��ѧѧ��, 2003, 28(3): 223-228.
XU Xu, LIANG Yan-chun, SHI Xiao-hu. Mechanical modeling of a longitudinally vibration ultrasonic motor[J]. Acta Acustica, 2003, 28(3):223-228.
[17]Aoyagi M, Tomikawa Y, Takano T. Simplified equivalent circuit of an ultrasonic motor and its applications[J]. Ultrasonics, 1996, 34(4): 275-278.
[18]LIN Shu-yu. Study on the sandwiched piezoelectric ultrasonic torsional transducer[J]. Ultrasonics, 1994, 32(6): 461-464.
�ո�����:2005 -03 -28
������Ŀ:������Ȼ��ѧ�����ش���Ŀ(50390064); ���ҡ�973���ƻ���Ŀ(2003CB716202)
�����:����ƽ(1966-), ��, ������̶��, ��ʿ, ���о�Ա, ���³��������������ӷ�װ���о�
������ϵ��: ����ƽ, ��, ��ʿ; �绰: 0731-8836499(O); E-mail: yyp@mail.csu.edu.cn
ժҪ: ��Բ���һά����ģ�����о������ͳ�������������ʱ������������������, ���һ������˫���Ӹ����ͳ�������; ��������ĶԳ��Խ����˶���������������ģ��; ����������������Ķ���ͬʱ����Hamilton����, �Ƶ��˿������������ЧӦ�Ķ������������ַ����붯���߽�����; ����Maple�����Զ����˶��ַ��̽������, ����˶�����������Ƶ��; ��������Ԫģ����һά����ģ�ͶԶ��ӵ���������Ƶ�ʽ��жԱȼ���, ��������ԭ�ͻ��Ĺ���Ƶ�ʽ��вⶨ�� �о��������: ����ģ�ͱ�һά����ģ�;��и��ߵķ�������; ���������ʵ��ֵ������Ԫ����ֵ�Ǻϡ�
�ؼ���: ��������; ѹ���մ�; ����Ƶ��; ������; ������
��ͼ�����:TM356 ���ױ�ʶ��:A ���±��: 1672-7207(2005)03-0452-06
