
DOI�� 10.11817/j.issn.1672-7207.2019.09.009
�����˻���ê����۹����ռ�������켣�滮
��ѩ��,����ƽ,����ƽ,л�º�,�ž���,����,�����,����
���й���ҵ��ѧ�������� ��������Ϣ����ѧԺ��������100083��
ժ Ҫ��
���۾������¹��ʸߡ�Ч�ʵ͵Ĺ��������Լ�ê��֧���Զ��������ܻ��������һ�������ܾ�֧ê���ϻ������Ļ����˻���ê������������й����ռ�����켣�滮�����ȣ�����D-H��������ê������Ͳ����۽ṹ���˶�ѧģ�ͣ��������ؿ���α�����������4����۽��й����ռ��������Σ�����������Эͬ�ֹ���ҵ����λ�����б��ϵ������Ŷ���Ͳ����۵Ĺؽ��˶��ף���������ʽ��ֵ���õ����ؽ���ʱ����˶��켣���̣�������˶�ѧģ�ͽ�������ĩ�˵��˶��켣���о���������������˻���ê�������ռ������㳤����Ϊ5 500 mm �� 3 600 mm�����������֧��Ҫ�����ĩ�˹켣����ʱ֧��֧����С����Ϊ100 mm��������ۺͲ����۱�λ�����о�������֧�ܷ������档
�ؼ���:D-H���������ؿ��巽���������ռ䣻�켣�滮����ê��
��ͼ�����:TP242 ���ױ�־��:A ���±��:1672-7207��2019��09-2128-10
Workspace analysis and trajectory planning of drill arm of roboticized bolting truck
HAO��Xuedi, JING��Xinping, ZHANG��Zhongping, XIE��Yonghou,ZHANG��Jinglin, LIU��Bing, LIANG��Zenan, WU��Miao
(School of Mechanical Electronic & Information Engineering, China University of Mining & Technology��Beijing��, Beijing 100083, China)
Abstract: To solve the engineering problems of high accident rate and low efficiency of fully mechanized excavation face in deep dangerous coal seam and the need of automation and intellectualization of bolt support, a kind of roboticized bolting truck matched with excavating-supporting-bolting machinery unit was proposed, and its workspace analysis and trajectory planning were carried out. Firstly, the kinematics models of roboticized bolting truck��s roof and side arms structure were established by D-H method, and the workspace of roboticized the four drill arms of the bolting truck was analyzed based on Monte Carlo pseudo-random number method; Secondly, to meet the demand of obstacle avoidance in the process of cooperative division of the left and right drill arm and displacement, the joint motion spectra of the roof and side arms were compiled, and the motion trajectory equation of each joint with time was obtained by using the five-term interpolation method, and the motion trajectory of the end of each drill rig was solved. The results show that roboticized workspace of the bolting truck can meet the support requirements of the test roadway for 5 500 mm��3 600 mm specification. The minimum distance from the end of the rig to the temporary support bracket is 100 mm, and the top and bottom side of the drill arm will not interfere with the bracket during the displacement.
Key words: D-H method; Monte Carlo method; workspace; trajectory planning; roboticized bolting truck
ú̿���ҹ���������Դ������dz��ú��Ŀݽߣ������������ú�����죬�����ú̿����Σ��ϵ����[1-5]��������в���¹��˵�������ȫ���о�������ú����������¹��������Ա���������ص��ֺ�֮һ[6]��ê�˻���ú�����֧���ؼ��豸����Ҫ��Ϊ����ê�����������ê�������ê���공�����У�����ê�˻��������豸Ӧ����㷺[7-8]�����������ê�����Ӧ�ý϶�[9]������2��װ���������ӣ���Ա����Σ���Դ����������״�����ҵ���������êʧ�����⡣���������ҹ��������з��˽��Ƚ���ê���공���簢����˹���տ�Boltec Sê��̨���������ʵ�ָ�Ч����ȫ��е��ê����ҵ�������������������豸����ʹ�ã��ҹ������з�CMM10-30��ʮ��ê���공[10]�����ê����������ú�����������������پ������װ�������������ڶ���Ϻ�������һ���ն������[11]����ˣ�ȱ��һ�ֿ���ʵ�־�֧ê������ҵ���������������������ҹ��ú�����������ê���공��Ŀǰ������о���Ա��ê��������˶�ѧ���Խ����˴����о�����ȡ��һ���ijɹ����Ĺ�����[12]��ê�������������˶�ѧ���Խ����о���ͨ������ê�������������������˶�ѧģ�ͣ���Ⲣ������֤������Ч�����ռ䡣�����µ�[13]��ê������ֶ��˶��Ŀ��Ʒ��������о���ͨ��ê����������˶�ѧ���̵õ����ؽ��˶��ǶȵĿ���ģ�ͣ��Ӷ�ȷ��ê������ڲ�ͬ����߶������µĹ�����Χ�������ҵ�[14]��ȫ��λ��������̬����װ�ý����о�������D-H��������������ϵ���������ṹ���˶�ѧ���̣�����������������Ч�����ռ䡣ë����[15]������D-H������Ϊ�������ھ����λ��Ӱ���µ�7���ɶȾ�êһ����˶�ѧģ�ͣ������˾�êһ������˶�ѧ���Ժ���ͷ�Ĺ����ռ䡣���ǣ���Щ�о�����������ê�������ͷ���ܵ���Ĺ����ռ䡣���뽭��[16]�ڷ�������ê����������ռ�Ļ����ϣ�����ADMAS���������ê�������ͷ���˶�ѧ���ԣ�������˵��ê��������ԴﵽԤ���Ķ����������ܱ�֤���˶������бܿ������ϰ����ڴˣ��������߽���Σ��ú���۾�������ܻ������˻�����[17-20]�����һ�ֻ����˻���ê����ʵ��ȫ�Զ���������ê��ҵ���ұ�֤���˶�������绷�����������档�ڻ����˻���ê��ԭ�����������ϣ��Զ�����ۺͲ����۽��й����ռ������ȷ�������˻���ê�����������Χ���������ĩ��·�����й켣�滮��ȷ����۸��ؽ��˶���Ŀ�����й켣���ߣ�����������˶�����������ʱ֧��֧��֮�䷢�����档���о�Ϊʵ�ֻ����˻���ê��������ܻ��˶�ѧ�����ṩ�ο���
1 �����˻���ê���ṹ�����ܼ��˶�ѧ��ģ
1.1�������˻���ê���ṹ���ܽ���
����Σ��ú�������Ҫ��Ϊ��߾����ҵ��ȫ����߾��Ч�ʣ���������ܻ���֧ê���ϻ���[21]�����У��۾��ʵ�����������߱�������λ��������ƫ�ͽظ�����Ӧ�ȹ��ܣ���ʱ֧������ʵ�������ʱ֧������ê����ɶ���������֧����ê�̡��������֧���Զ��������ܻ����������һ�����֧ê���ϻ������Ļ����˻���ê������װ�����������������Ĺ����У�ͨ����ê������ף�װê�̼���װê������ȫ�Զ�����ê��ҵ������ͬ������������������֧�������Ҿ߱�������λ�����Э������Ӧ�ȹ���[22-23]��
Ϊ�����������Ͱ��ê��Ҫ�����˻���ê�����Ϊ˫���ı�ʽ�ṹ��ͼ1��ʾΪ�����˻���ê��ԭ����������ͼ1�ɼ��������˻���ê������������ۡ������ۡ����塢ê���洢�����ͻ�������ʱ֧�����������У�������ۺͲ����۾��ԳƲ����ڳ���ǰ���복��֮����ת������ƽ�Ƹ����ᡣ������ۿ����ڳ�����ˮƽ�ƶ�����תһ���Ƕȣ������ۿ����ڳ��������ƶ�����תһ���Ƕȡ�ͼ2��ʾΪ��۽ṹͼ����ͼ2�ɼ��������Ҫ����ܡ�ê�˴洢����װװ�á�ê�̼���עװ�ú����װжװ����ɣ�����ۿ���ʵ����ê�ס�װê�̼���װê������ȫ�Զ�����ҵ��
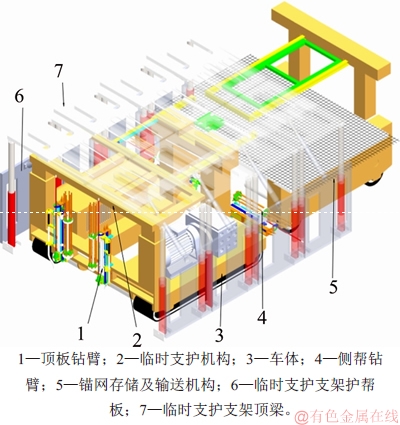
ͼ1�������˻���ê��ԭ��ʾ��ͼ
Fig. 1��Schematic diagram of roboticized bolting truck
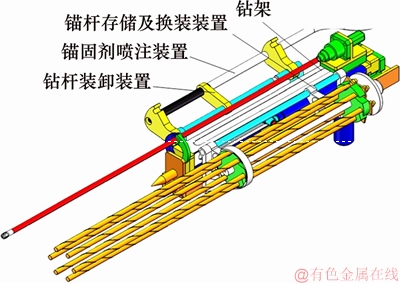
ͼ2����۽ṹͼ
Fig. 2��Diagram of drill arm structure
1.2����ê������˶�ѧ��ģ
������ۺͲ���������ê�������Ͼ�Ϊ�ԳƲ��ã���ˣ�ֻ��Ҫ��ѡȡ����һ����۽��з������ɵ�֪��һ����۵��˶�������ֱ�ѡȡ��������ۺͲ������۽����˶�ѧ��ģ��
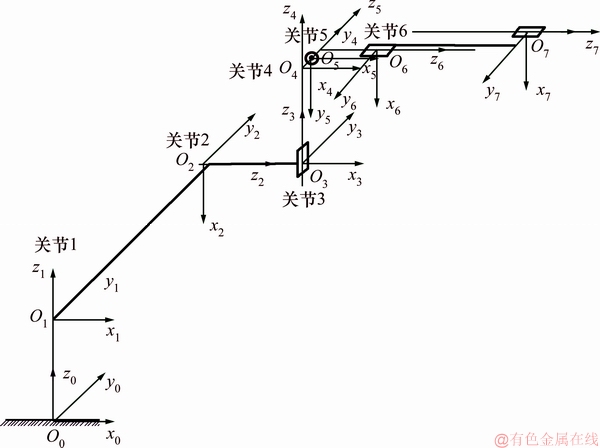
����ê����۵�ЧΪ������ͬ�ĸ˼��ؽڣ�����D-H����ϵ�������Ը���ê��е������ϵ�Ľ��������¹涨������ê��������ۺ����ƶ��������������������������Ϊ��ʼ������ϵO0x0y0z0���ڵ�i���ؽ��ϵ�����ϵΪOixiyizi������i������ԭ��λ�ڹؽ�i��ؽ�i+1���ߵĽ��㴦������i��z����ؽ�i+1�������غϣ�����i��x���ڹؽ�i���ߺؽ�i+1���ߵĹ��������ϣ�����ӹؽ�i����ָ��ؽ�i+1���ߣ�����i��y�������ֶ�����ȷ����
1.2.1��������������˶�ѧ��ģ��
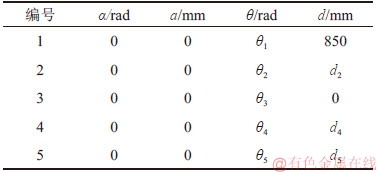
���������涨������ê�����������ÿ���ؽڽ�������ϵ��ͼ3��ʾΪ���������D-H����ϵ���ɶ�����۵�ʵ�ʳߴ�õ���������۵�D-H���������1��ʾ�����У�aΪ���˳��ȣ���Ϊ�������˵�Ť�ǣ�dΪ�������˵ľ��룬��Ϊ����2�����˵ļнǡ�
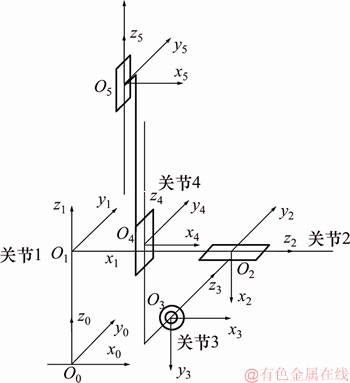
ͼ3�����������D-H����ϵ
Fig. 3��D-H coordinate system of the right top drill arm
��1�����������D-H����ϵ����
Table 1��D-H coordinate system parameters of the right top drill arm
���ݽ�����D-H����ϵ���������ͨ��������ڹؽ�����ϵ֮��ľ���任�õ����ĩ��ê���������ڻ�����ϵ�������˶�ѧģ�ͣ���ê���������ڻ�����ϵ�Ŀռ�λ�ˡ��������������任��ʽ���£�


ʽ�У�R(x, ��)��ʾ��ǰ����ϵ��x����ת�ȽǶȣ�R(z, ��)��ʾ��ǰ����ϵ��z����ת�ȽǶȣ�[nx,ny,nz]��[ox,oy,oz]��[ax,ay,az]�ֱ�Ϊĩ��ִ��������ڻ�����ϵ����̬������[px,py,pz]Ϊĩ��ִ��������ڻ�����ϵ��λ��������

������任����Ϊ
����������˶�ѧ����Ϊ
1.2.2���������������˶�ѧ��ģ��
����D-H����ϵ������������ê���������۵�D-H����ϵ����ͼ4��ʾ���ɲ����۵�ʵ�ʳߴ�õ���������۵�D-H���������2��ʾ��
ͼ4����������D-H����ϵ
Fig. 4��D-H coordinate system of the right side drill arm
��2����������D-H����ϵ����
Table 2��D-H coordinate system parameters of the right side drill arm
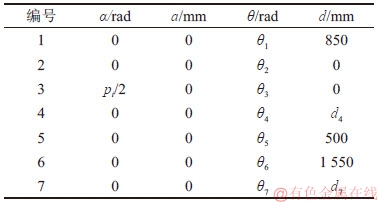
���ݽ�����D-H����ϵ���������ͨ��������ڹؽ�����ϵ֮��ľ���任���õ���������ĩ��ê���������ڻ�����ϵ���˶�ѧģ�ͣ�

ʽ�У�
������任����Ϊ
ʽ�У�
���������˶�ѧ����Ϊ
2 ��ê����۹����ռ����
�����ռ���ָ�����ܹ��ﵽ��Ŀ���ļ��ϣ�����ê����۹����ռ���ָ��ê����ͷ���ܸ��ǵĿռ�㼯���������ؿ���α�����������ȡ�����������˶�ѧ���̣�������ê��4����ۿɵ���Ĺ����ռ䣬ͼ5��ͼ6��ʾ�ֱ�Ϊ��ê����۹����ռ估��xOzƽ��ͶӰ�����У���Ϊ�������۹����ռ䣬��Ϊ��������۹����ռ䣬��Ϊ��������۹����ռ䣬��Ϊ�������۹����ռ䡣
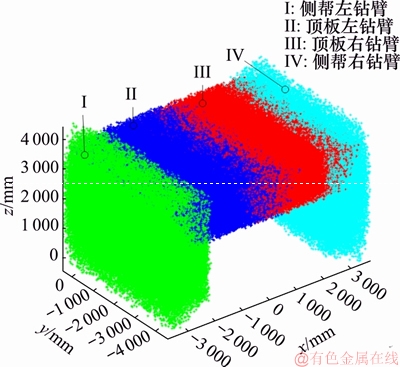
ͼ5����ê����۹����ռ�
Fig. 5��Working space of drill arm of bolting turck
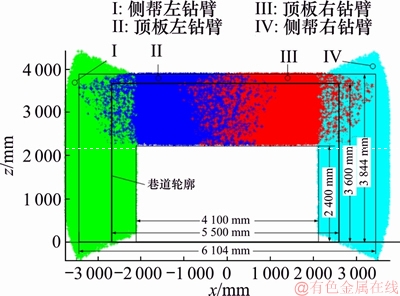
ͼ6����۹����ռ�xOzƽ��ͶӰ
Fig. 6��Projection of drill arm workspace in xOz plane
��ͼ5��ͼ6 �ɼ�����ê����������������������Ϊ6 104 mm��3 844 mm����СΪ4 100 mm��2 400 mm���ܸ��dz�����Ϊ5 500 mm��3 600 mm������ռ�����ê�ף��������֧��Ҫ��
ͼ7����������۸��ؽ��˶�����
Fig. 7��Movement steps of the right top drill arm joints
3 ��ê����۹켣�滮
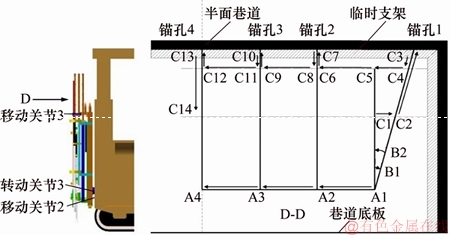
ͨ�������ռ�������Եõ������ĩ�����ܴﵽ�Ŀռ䷶Χ��������۱�λ���������ĩ�����׳�������ʱ֧��Һѹ֧�ܻ�װ�֮����ײ��������ˣ�����Ի����˻���ê������˶��켣���й滮����ʵ����ȫ�Զ���������ҵ�ж���ϰ�����ȷ��ê���ܡ������˻���ê����ȫ�Զ�����ê��ҵ�У�������۶Զ���7��ê����ê�̣������Ҷ������ê�����һ��4��ê�ף����Ҳ����۷ֱ�����Ұ��5��ê����ê�̡�
3.1����������۹켣�滮
��ê���������Ϊ���ҶԳƲ��ã�ѡ��Զ�������۵��˶��켣�����о�������ʵ�ʹ������趨��ê���������������������4��ê����ê�������˶�ʱ�乲120 s������˶�ʱ�䲻���������ê��ҵʱ�䡣ͼ7��ʾΪ��������۸��ؽ��˶����裬��3��ʾΪ��������۹ؽ��˶��ף����У�A�����ƶ��ؽ�2��B����ת���ؽ�3��C�����ƶ��ؽ�4����ͼ3�йؽڶ�Ӧ����ͷָ��Ϊ�ùؽڵ��ƶ�����
��3����������۹ؽ��˶���
Table 3��Articulation spectrum of the right top drill arm

��������˶��켣��Լ�����������ζ���ʽ��ֵ�켣�滮�Ѳ���������۵Ĺ���Ҫ�������������ʽ��ֵ�����滮���ĩ���˶��켣��������������۹ؽ��˶��Ĺ涨�����ƶ��ؽ�2Ϊ�����ߴζ���ʽ��ֵ�����ȶԹؽ�2��20~40 s���˶��켣���м��㣬ͨ��ʵ����6��Լ���������Թؽ�2���˶����̽�����⡣
��ؽ�2����ʱ����˶�����Ϊ
S(t)=a0+ a1t+ a2t2+ a3t3+ a4t4+ a5t5 (7)
�����˶�������λ��Լ���У�
S(20)=x1��
S(40)=x2��
S(30)= 
�����˶��������ٶ�Լ���У�
S��(20)=S��(40)=0
�����˶��������ٶȵ�Լ���У�
S��(40)=0
�����з���д�ɾ�����ʽΪ

��ʽ(8)��֪��6�������Ϊ6�����ԣ����̴���Ψһ�⣬��ʽ(8)��⣬�õ�����ϵ��a0=-6.26��a1=1.43��a2=-0.10��a3=0.003 5��a4=-0.000 06�� a5=-0.000 004��
ͬ�����Թؽ�2���ؽ�3�ؽ�4�ڸ�ʱ����ڵ��˶��켣����ϵ����⡣����������۹ؽ�2���ؽ�3�ؽ�4��1�������ڸ��ؽ���ʱ����˶��켣���̴��뵽�˶�ѧ����ʽ�У��õ����ĩ�˵��˶��켣��ͼ8��ʾΪ����������ĩ���˶��켣��
��ʱ֧��֧�ܶ�����200 mm���������75 mm����ͼ8�ɼ������ĩ����x�����λ��Ϊ2 370 mm��������ʱ֧�ܻ�����ڲ�Ϊ205 mm��z�����λ��Ϊ3 600 mm, ���ĩ�˿ɴﵽ��Ҫ����Ŀ��ê��λ�ã���λ������z��λ��Ϊ3 250 mm������֧�ܶ����±߽�150 mm����ˣ��ڶ�������˶��пɱ�����֧�ܶ����ͻ����֮��������档
3.2���������۹켣�滮
��ʽ(5)��������ê��������������ϵ�У��˼�1���˼�2���˼�4Ϊ����˼���������˶�ʱ������ȡ��Ӧ�̶�ֵ���ɡ��Թؽ�3���ؽ�5�ؽ�6���˶������¹涨��
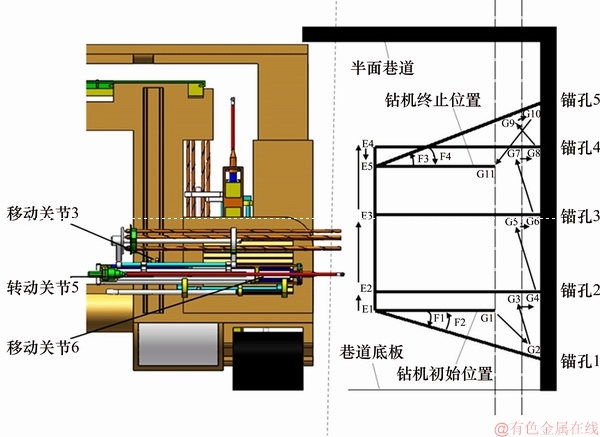
��ê�������������������5��ê����ê�������˶�ʱ�乲150 s������˶�ʱ�䲻���������ê��ҵʱ�䡣ͼ9��ʾΪ�������۸��ؽ��˶����裬��4��ʾΪ�������۹ؽ��˶��ף����У�E�����ƶ��ؽ�3��F����ת���ؽ�5��G�����ƶ��ؽ�6����ͼ4�йؽڶ�Ӧ����ͷָ��Ϊ�ùؽڵ��ƶ�����
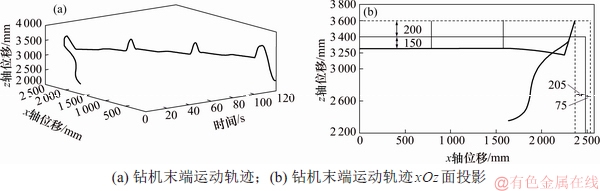
ͼ8������������ĩ���˶��켣
Fig. 8��Trajectory of the end of the top drill arm
ͼ9���������۸��ؽ��˶�����
Fig. 9��Movement steps of the right side drill arm joints
��4���������۹ؽ��˶���
Table 4��Articulation spectrum of the right side drill arm joint

ͬ��ʹ�øߴζ���ʽ�ؽڹ켣�滮�ķ����Թؽ�3���ؽ�5�ؽ�6���йؽڹ켣�滮�������õ��ĸ��ؽ��˶��켣��������ʽ(6)�У��õ�������ĩ�˵��˶��켣��ͼ10��ʾΪ��������ĩ���˶��켣��

ͼ10����������ĩ���˶��켣
Fig. 10��Trajectory of the end of the right side drill arm
��ͼ10�ɼ������ĩ����x������λ��Ϊ2 750 mm����λ�����У��������250 mm, ����ʱ֧��֧�ܻ�����ڲ�175 mm��z������λ��Ϊ3 300 mm���������֧�ܶ���100 mm����Сλ�Ƹ��ڵװ�250 mm����ˣ��������˶��пɱ�������ʱ֧��֧�ܼ��װ�������档
4 ����
1) �����һ��������ʽ���������ʱ֧���������Ļ����˻���ê�����Ҹ�װ���߱�ȫ�Զ���������ê��ҵ��������λ�����Э������Ӧ�ȹ��ܡ�
2) �����˻����˻���ê������˶�ѧģ�ͣ������˶�����ۺͲ����۹����ռ䣬�����˻���ê�������ռ��ܸ��������Ϊ6 104 mm��3 844 mm����С������Ϊ4 100 mm ��2 400 mm������������㳤����Ϊ5 500 mm��3 600 mm�����������֧��Ҫ��
3) ����ê����۵��˶��ؽڽ����˹켣�滮��ȷ����۹ؽ��˶��ף������ڶ���ʽ��ֵ������Ĺؽ��˶��켣����������Ӧ�������˶�ѧ�����У��õ����ĩ�˵��˶��켣��������������������۱�λ���������ĩ�˾��붥��350 mm�����������ʱ֧��֧�ܶ���150 mm�������۱�λ�����ĩ�˾������250 mm����֧�ܻ�����ڲ�175 mm����ˣ�����Ͱ�����ĩ�˵��˶��켣����������ʱ֧��֧�ܷ������棬���㹤��Ҫ��
�ο����ף�
[1] ZHANG Guangchao, HE Fulian, LAI Yonghui, et al. Ground stability of underground gate road with 1 km burial depth: a case study from Xingdong coal mine, China[J]. Journal of Central South University, 2018, 25(6): 1386-1398.
[2] ������, ��ӵ��, �ν�, ��. ������ѹ���ê��֧�������о���ʵ��[J]. ú̿ѧ��, 2015, 40(10): 2225-2233.
KANG Hongpu, WU Yongzheng, HE Jie, et al. Rock bolting performance and field practice in deep roadway with rock burst[J]. Journal of China Coal Society, 2015, 40(10): 2225-2233.
[3] ������, ������, ������, ��. ú��ǧ���Χ�ҿ��Ƽ����ܿ��ɼ�������[J]. ú̿ѧ��, 2018, 43(7): 1789-1800.
KANG Hongpu, WANG Guofa, JIANG Pengfei, et al. Conception for strata control and intelligent mining technology in deep coal mines with depth more than 1000m[J]. Journal of China Coal Society, 2018, 43(7): 1789-1800.
[4] �����. �»�����ˮ������ǰ���������о���Ӧ��[J]. ú̿ѧ��, 2014, 39(6): 1112-1117.
ZHAO Qingbiao. Ordovician limestone Karst water disaster regional advanced governance technology study and application[J]. Journal of China Coal Society, 2014, 39(6): 1112-1117.
[5] �ſ�ѧ. �������������������»ز���������ѹ�����о�[J]. ��ʯ��ѧ�빤��ѧ��, 2017, 36(4): 1040.
ZHANG Kexue. Mechanism study of coal bump under tectonic and ultra-thick conglomerate coupling conditions in mining roadway[J]. Chinese Journal of Rock Mechanics and Engineering, 2017, 36(4): 1040.
[6] ����, ������, ��Ϊ��, ��. ���ڵ���Ԥ����ú�ﶥ���¹ʷ����о�[J]. �ɿ��밲ȫ����ѧ��, 2012, 29(1): 14-20.
WANG Qi, LI Shucai, LI Weiteng, et al. Prevention of coal roadway roof accidents based on geological forecast technology[J]. Journal of Mining & Safety Engineering, 2012, 29(1): 14-20.
[7] ������. �ҹ�ú�����ê��֧��������չ60�꼰չ��[J]. �й���ҵ��ѧѧ��, 2016, 45(6): 1071-1081.
KANG Hongpu. Sixty years development and prospects of rock bolting technology for underground coal mine roadways in China[J]. Journal of China University of Mining & Technology, 2016, 45(6): 1071-1081.
[8] ������.�ҹ�ú��ê���공��Ӧ����״�뷢չ����[J].ú̿����, 2010, 42(6): 101-103.
ZHANG Youzhen. Application status and development trend of coal mine bolt drilling cars in China[J]. Coal Engineering, 2010, 42(6):101-103.
[9] ����. �ҹ��ۺϻ�е�����������չ40a[J]. ú̿ѧ��, 2010, 35(11): 1815-1820.
WANG Hong. The 40 years developmental review of the fully mechanized mine roadway heading technology in China[J]. Journal of China Coal Society, 2010, 35(11): 1815-1820.
[10] ������. CMM10-30��ê���공��������Ӧ��[J]. ú̿����, 2018, 37(3): 245-246.
SONG Mingjiang. Application of CMM10-30 roof bolter in Shendong mining area[J]. Coal Technology, 2018, 37(3): 245-246.
[11] �½���. ú��������װ���ؼ�������״��չ��[J]. ú̿��ѧ����, 2014, 42(8): 69-74.
HAO Jiansheng. Present status and outlook of key technology for mine roadway heading equipment[J]. Coal Science and Technology, 2014, 42(8): 69-74.
[12] �Ĺ���, �Ժ�ǿ, Ф��, ��. ȫҺѹ�Ĵ�ʽê�������������˶�ѧ�������о�[J]. �人������ѧѧ��, 2012, 34(10): 132-136.
WEN Guochen, ZHAO Hongqiang, XIAO Hua, et al. Kinematics analysis and research of hydraulic roof bolter luffing mechanism[J]. Journal of Wuhan University of Technology, 2012, 34(10): 132-136.
[13] ������, ����, ��Ӣ. ����ê������ֶ�ʽ���Ʒ����о�[J]. �������ѧ��, 2015, 22(1): 72-77.
YUE Lixin, ZHANG Pei, MA Ying. Research on the sectional control method of airborne jumbolter[J]. Chinese Journal of Engineering Design, 2015, 22(1): 72-77.
[14] ������. ȫ��λ��������̬����װ���о�[J]. ú̿����, 2015, 34(12): 207-209.
XIN Dezhong. Research of all directions posture adjustment mechanism of coal mine rig[J]. Coal Technology, 2015, 34(12): 207-209.
[15] ë��, �ϻ�, �º���, ��. ���������ê������˶�ѧ������켣����[J]. ��е���, 2016, 33(4): 42-47.
MAO Jun, MENG Hui, CHEN Hongyue, et al. Kinematics analysis and track simulation of jumbolter mounted on road header[J]. Journal of Machine Design, 2016, 33(4): 42-47.
[16] ���뽭. �����ê��֧����ҵƽ̨�ؼ������о�[D]. ����: ����������ѧ��е����ѧԺ, 2015: 60-67.
MA Qijiang. Key technology research of monorail operating platform in anchor bolting[D]. Huainan: School of Mechanical Engineering. Anhui University of Science & Technology, 2015: 60-67.
[17] ������. �к�ú�����ܻ����������˸�Ч���ɹؼ������о���Ӧ��[J]. ú��, 2016, 21(3): 31-35.
LI Mingzhong. Key technology of minerless high effective mining in intelligent working face with medium-thickness seam[J]. Coal Mining Technology, 2016, 21(3): 31-35.
[18] ����, ���ױ�, ������, ��. ú���۲ɹ��������˻����ɵ��ں���ʵ��[J]. ú̿��ѧ����, 2014, 42(9): 26-29, 51.
ZHANG Liang, LI Shoubin, HUANG Zenghua, et al. Definition and realization of unmanned mining in fully- mechanized coal mining face[J]. Coal Science and Technology, 2014, 42(9): 26-29, 51.
[19] �ſ�ѧ. �۾��������ܻ����ɼ����о�[J]. ú̿��ѧ����, 2017, 45(7): 106-111.
ZHANG Kexue. Study on intelligent mining technology of fully-mechanized heading face[J]. Coal Science and Technology, 2017, 45(7): 106-111.
[20] ������. ���ܻ���úװ���Ĺؼ�����[J]. ú̿��ѧ����, 2014, 42(9): 7-11.
GE Shirong. Key technology of intelligent coal mining equipment[J]. Coal Science and Technology, 2014, 42(9): 7-11.
[21] ��ѩ��, ��ΰ��, ����ƽ, ��. ���ڻ����˻���֧ê���ϻ�����۵�ʽ�공��۹����ռ����[J]. �й�ú̿, 2018, 44(9): 64-70.
HAO Xuedi, JI Weiliang, JING Xinping, et al. Analysis of drill boom work space of folding drill carriage based on roboticized excavation-support-bolting combined unit[J]. China Coal, 2018, 44(9): 64-70.
[22] GUO Yinan, CHENG Wei, GONG Dunwei, et al. Adaptively robust rotary speed control of an anchor-hole driller under varied surrounding rock environments[J]. Control Engineering Practice, 2019, 86: 24-36.
[23] ��һ�, ½ϣ��, ����, ��.��Ƶ�ÿ�ê����۰ڽǶ�̬��ģ����Ӧ����[J/OL].����������Ӧ�ã� 2019-03-19. http://kns.cnki.net/kcms/detail/44.1240.TP.20190318.1045.024.html.
GUO Yinan, LU Xiwang, ZHANG Zhen, et al. Dynamic sliding-mode adaptive control for the rotation angle of an anchor-hole drilling arm driven by a variable-frequency pump[J/OL]. Control Theory & Applications, 2019-03-19. http://kns.cnki.net/kcms/detail/44.1240.TP.20190318.1045.024.html.
���༭ �Կ���
�ո����ڣ� 2018 -12 -27; �����ڣ� 2019-03 -24
������Ŀ(Foundation item)�������ص�����о���չ�ƻ�(973�ƻ�)��Ŀ(2014CB046306) (Project(2014CB046306) supported by the National Basic Research Development Program(973 Program) of China)
ͨ�����ߣ���ѩ�ܣ���ʿ�������ڣ����¿�ɽ��������̷���Դ�������о���E-mail��haoxd@cumtb.edu.cn
ժҪ:����Σ��ú���۾������¹��ʸߡ�Ч�ʵ͵Ĺ��������Լ�ê��֧���Զ��������ܻ��������һ�������ܾ�֧ê���ϻ������Ļ����˻���ê������������й����ռ�����켣�滮�����ȣ�����D-H��������ê������Ͳ����۽ṹ���˶�ѧģ�ͣ��������ؿ���α�����������4����۽��й����ռ��������Σ�����������Эͬ�ֹ���ҵ����λ�����б��ϵ������Ŷ���Ͳ����۵Ĺؽ��˶��ף���������ʽ��ֵ���õ����ؽ���ʱ����˶��켣���̣�������˶�ѧģ�ͽ�������ĩ�˵��˶��켣���о���������������˻���ê�������ռ������㳤����Ϊ5 500 mm �� 3 600 mm�����������֧��Ҫ�����ĩ�˹켣����ʱ֧��֧����С����Ϊ100 mm��������ۺͲ����۱�λ�����о�������֧�ܷ������档
[2] ������, ��ӵ��, �ν�, ��. ������ѹ���ê��֧�������о���ʵ��[J]. ú̿ѧ��, 2015, 40(10): 2225-2233.
[3] ������, ������, ������, ��. ú��ǧ���Χ�ҿ��Ƽ����ܿ��ɼ�������[J]. ú̿ѧ��, 2018, 43(7): 1789-1800.
[4] �����. �»�����ˮ������ǰ���������о���Ӧ��[J]. ú̿ѧ��, 2014, 39(6): 1112-1117.
[5] �ſ�ѧ. �������������������»ز���������ѹ�����о�[J]. ��ʯ��ѧ�빤��ѧ��, 2017, 36(4): 1040.
[6] ����, ������, ��Ϊ��, ��. ���ڵ���Ԥ����ú�ﶥ���¹ʷ����о�[J]. �ɿ��밲ȫ����ѧ��, 2012, 29(1): 14-20.
[7] ������. �ҹ�ú�����ê��֧��������չ60�꼰չ��[J]. �й���ҵ��ѧѧ��, 2016, 45(6): 1071-1081.
[8] ������.�ҹ�ú��ê���공��Ӧ����״�뷢չ����[J].ú̿����, 2010, 42(6): 101-103.
[9] ����. �ҹ��ۺϻ�е�����������չ40a[J]. ú̿ѧ��, 2010, 35(11): 1815-1820.
[10] ������. CMM10-30��ê���공��������Ӧ��[J]. ú̿����, 2018, 37(3): 245-246.
[11] �½���. ú��������װ���ؼ�������״��չ��[J]. ú̿��ѧ����, 2014, 42(8): 69-74.
[13] ������, ����, ��Ӣ. ����ê������ֶ�ʽ���Ʒ����о�[J]. �������ѧ��, 2015, 22(1): 72-77.
[14] ������. ȫ��λ��������̬����װ���о�[J]. ú̿����, 2015, 34(12): 207-209.
[15] ë��, �ϻ�, �º���, ��. ���������ê������˶�ѧ������켣����[J]. ��е���, 2016, 33(4): 42-47.
[16] ���뽭. �����ê��֧����ҵƽ̨�ؼ������о�[D]. ����: ����������ѧ��е����ѧԺ, 2015: 60-67.
[17] ������. �к�ú�����ܻ����������˸�Ч���ɹؼ������о���Ӧ��[J]. ú��, 2016, 21(3): 31-35.
[18] ����, ���ױ�, ������, ��. ú���۲ɹ��������˻����ɵ��ں���ʵ��[J]. ú̿��ѧ����, 2014, 42(9): 26-29, 51.
[19] �ſ�ѧ. �۾��������ܻ����ɼ����о�[J]. ú̿��ѧ����, 2017, 45(7): 106-111.
[20] ������. ���ܻ���úװ���Ĺؼ�����[J]. ú̿��ѧ����, 2014, 42(9): 7-11.
