
�绡¯�缫����ϵͳ�ķ������Ի�³������
���£���С�ӣ�ʷ����
(������Ϣ�Ƽ���ѧ �Զ���ѧԺ��������100192)
ժ Ҫ��
����ϵͳ�ķ������Ի�³���������⡣Ӧ���ּ��ε����Է��������Ե绡¯�缫����ϵͳ�ķ����Բ��ֽ��д��������ڴ˻��������³��������������MATLAB���ַ��档�������������������Ի�³�����ƾ��и���ĸ������ܣ���������С����PID�͵����ķ������Ի�����Ч���á�
�ؼ��ʣ�
�绡¯�缫�������������Ի���³��������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0228-05
Feedback linearization robust control of
arc furnace electrode regulator system
GAO Yuan, LIU Xiao-he, SHI Shu-dong
(School of Automation, Beijing Information Science and Technology University, Beijing 100192, China)
Abstract: The method of feedback linearization robust control for arc furnace electrode regulator system is discussed. With the linear feedback method of differential geometry dealing with non-linear part of electric arc furnace system, the controller was designed, and several simulations was done. Simulation results show that the feedback linearization robust control has shorter response time and smaller overshoot than the PID control and simplex feedback linearization control have.
Key words: arc furnace electrode regulator; feedback linearization; robust control
�绡¯��һ�����õ绡��Ϊ��Դ��¯�ӣ���ĿǰӦ�õ���Ϊ�ձ��һ�����ַ������绡¯ϵͳ��һ��������������ԡ�ǿ��ϵ�ʱ��ϵͳ������������ء���ˣ����ͨ���缫����ϵͳ���ƺ��ʵĻ�����ʹ֮�ȶ����ǵ绡¯����ϵͳ����Ҫ�о����档���������ܶ�ѧ�߽����ܿ��Ƶȷ���Ӧ���ڵ绡¯�缫����ϵͳ�У�����ȡ����һ���ɹ���������������֪ʶ��ȱ�����Ӷ����¿���Ч����Ҫ��ʵ��Ӧ���н��н�һ���ĸĽ�[1-2]���������Ի�³�������ǽ��������Ի��Ŀ��Ʒ�����³����ϣ��γɵ�һ�ֻ�Ͽ��Ʒ����������˼����ͨ���ʵ��ķ�����״̬�����ͷ���������任����һ��������ϵͳ�任��Ϊһ������ϵͳ��Ȼ���ٶ�ϵͳ����³��������������ϵͳ���ܣ���ǿϵͳ��³���ԡ��������߽����ֿ��Ʒ���Ӧ�õ��绡¯�缫����ϵͳ�У���Ч�ؿ˷��˲�ȷ���Ը��Ŷ�ϵͳ��Ӱ�죬ʹϵͳ�Ķ���̬Ʒ�ʵõ��˽�һ��������
1 �绡¯�缫����ϵͳ������
�绡¯�缫����ϵͳ������һ�������Դ��������������䶯̬���ԡ����У��缫�������������Դ��ݺ����������绡¯����·����һ�������״̬���������������ڵ���绡¯ϵͳ�����ѵ绡¯����·��Ϊ���绡����ӳ��Ϊ�绡�����ķ����Ի��ڣ���
![]() (1)
(1)
���У�IΪ�绡������Чֵ��LΪ�绡�������绡¯������ϵͳ��ͼ��ͼ1��ʾ��ͼ�зŴ�������������ٷ����Լ�������Ϊ����ϵͳ��
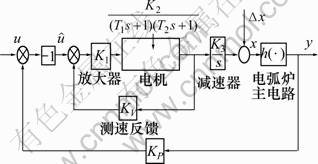
ͼ1 ����绡¯�缫����ϵͳ����ͼ
Fig.1 Block diagram of simple-phase arc furnace electrode regulation system
��ͼ1��ϵͳ�ַ���Ϊ
![]()
![]() (2)
(2)
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��
![]() ��
��![]()
��![]() ��
��![]() ��
��
![]() ��
��
���绡¯ϵͳ������Ϊ���·���ϵͳ����ʽ
![]() (3)
(3)
���� ��
�� ��
��
2 �绡¯�缫����ϵͳ�ķ����� �Ի�
2.1 �����뵥���ϵͳ�ķ������Ի�
�������µ����뵥���ϵͳ��
![]() (4)
(4)
ʽ�У�![]() ��nά������f(x)��g(x)Ϊnά�⻬����������u��yΪ������h(x)Ϊ������������ϵͳ(4)����Խ���ϵͳ�Ľ�����ͬʱ��ϵͳ���Ծ�ȷ�������Ի�������״̬������ʽ
��nά������f(x)��g(x)Ϊnά�⻬����������u��yΪ������h(x)Ϊ������������ϵͳ(4)����Խ���ϵͳ�Ľ�����ͬʱ��ϵͳ���Ծ�ȷ�������Ի�������״̬������ʽ
![]()
�����������Ϊ![]() ��ʽ�У���Ϊ������vΪ���������źš�
��ʽ�У���Ϊ������vΪ���������źš�
2.2 �绡¯ϵͳ�ķ������Ի�
����ϵͳ(3)����Lie�����ɵã�ϵͳ��Խ�r=3����ϵͳ����n��ͬ�����Ե绡¯�缫����ϵͳ���Ծ�ȷ�������Ի���
��![]() ��
��![]() ��
��![]() ���������Ի��е�״̬�������Ի���Ϊ��
���������Ի��е�״̬�������Ի���Ϊ��
![]()
![]() (5)
(5)
��ô�����Խ�ԭ������ϵͳ�任Ϊ����ϵͳ��
 (6)
(6)
ʽ(6)��д����
![]() ��
��
���� ��
��![]() ��
��![]() ��
��
3 �绡¯�缫����ϵͳ³������
3.1 ��ȷ��������ϵͳ��³������
�������²�ȷ��������ϵͳ
![]() (7)
(7)
���У�![]() Ϊϵͳ��״̬������
Ϊϵͳ��״̬������ ![]() ��
��![]() �ֱ���ϵͳ�����������������?f(x)��?g(x)�ֱ���ϵͳ��״̬��ȷ���Լ����벻ȷ���ԣ�f(x)��?f(x)��g(x)��?g(x)�ǹ⻬��������
�ֱ���ϵͳ�����������������?f(x)��?g(x)�ֱ���ϵͳ��״̬��ȷ���Լ����벻ȷ���ԣ�f(x)��?f(x)��g(x)��?g(x)�ǹ⻬��������
����1 ϵͳ(7)�IJ�ȷ��������ƥ�����������ڹ⻬����D(x): Rn��Rm��E(x): Rn��Rm��mʹ�ö�![]() ����?f(x)=G(x)D(x)��
����?f(x)=G(x)D(x)��![]()
![]() ����������[3]����ϵͳ����任Ϊ
����������[3]����ϵͳ����任Ϊ![]()
![]() ��NΪά���ʺϵľ��������������ڣ���ô��ϵͳ(7)�ɽ������Ի��任���������Ի�������Ϊ
��NΪά���ʺϵľ��������������ڣ���ô��ϵͳ(7)�ɽ������Ի��任���������Ի�������Ϊ
![]() (8)
(8)
��![]() �������������
�������������![]() �����������
�����������
![]()
�������Ի���(8)������д��ϵͳ(7)����̬������
![]()
![]() (9)
(9)
����(M, N)�ܿأ�����ڷ�����![]() ��
��![]() ��ʹ����M-NK�������������и�ʵ����
��ʹ����M-NK�������������и�ʵ����
����2 ����![]() �����ڷǸ���������
�����ڷǸ���������
��1(x)�ͦ�2(x)��
![]() (10)
(10)
![]() ��(11)
��(11)
���У�||��||��ʾRm�ռ��2������||��||ico��ʾRm��m�ռ���������
Ϊ��ʹϵͳ���y����ָ�����ɸ����������yd���䲹����ȷ���Զ�ϵͳ��Ӱ�죬���ղ���ԭ����ƵĿ����ź�v��Ϊ����2������
![]() (12a)
(12a)
![]() (12b)
(12b)
 (12c)
(12c)
���У�![]() ���źͦ��Ǹ����ij������� >0��
���źͦ��Ǹ����ij������� >0��![]() ��
��![]() �Ǿ���P���������ֵ��P�������Գ���Ϊ����������ŵ�̵Ľ�
�Ǿ���P���������ֵ��P�������Գ���Ϊ����������ŵ�̵Ľ�
![]() �� (13)
�� (13)
����[4]�������ȷ��������ϵͳ(7)�������1�ͼ���2����ô�ڿ�����(8)��(12)�������£����y����ָ�����ɸ����������yd��
3.2 �绡¯ϵͳ��³������
�ڵ绡¯�缫����ϵͳ���ڻ������ŵ�����£����軡������Ϊ?x (�н��������x1�Ƚ�С)������ʱ��ɱ䡣�����Ŵ���ʽ��(3)��֪��
![]() (14)
(14)
�����ɵã�
![]() (15)
(15)
��![]() ��
��![]() ��
��
![]() ����ϵͳ�ɼ�����
����ϵͳ�ɼ�����
![]() (16)
(16)
�������о��У���![]() ���Ƶ绡¯����·������ʵ��ϵͳģ�ͻ�����һ�������ɽ�������������绡¯ϵͳ�Ļ�������dxһ���ǣ�����ϵͳ�IJ�ȷ���ԣ�����?f(x)����绡¯�缫����ϵͳ�ɱ�ʾΪ����ʽ��
���Ƶ绡¯����·������ʵ��ϵͳģ�ͻ�����һ�������ɽ�������������绡¯ϵͳ�Ļ�������dxһ���ǣ�����ϵͳ�IJ�ȷ���ԣ�����?f(x)����绡¯�缫����ϵͳ�ɱ�ʾΪ����ʽ��
![]() (17)
(17)
�������![]()
![]() ��
��
��Ϊ![]() ��
��![]() �����ԣ��ɵ�
�����ԣ��ɵ�![]() ������ϵͳ(7)�Աȣ���֪
������ϵͳ(7)�Աȣ���֪![]() ��������ʽ(12)�еĿ����ź�Ϊ��
��������ʽ(12)�еĿ����ź�Ϊ��
![]() (18)
(18)
 (19)
(19)
�����Ͽ����������£����y������ָ�����ɸ����������yd��
4 �����о�
�����Ե���绡¯�缫����ϵͳ�Ŀ���Ϊ��������֤�����������Ի�³�����Ƶ�Ӧ��Ч�����������������Ƕ��ڸ����绡��������Ѹ�ٵ��ڵ��ʹ��������Եõ����ʵĵ绡����L���Ӷ���ú��ʵĵ绡�����������������绡¯�缫����ϵͳ(ͼ1)�еIJ���ֵ���£�K1=30.49��K2=2.45��K3=0.038��T1+T2=0.172��T1T2=0.000 425��KV=0.05��KP=1��
�ο�����ϵͳ����Ϊ![]() ��
��
ѡȡc0=19 000��c1=2 900��c2=45��
�������Գƾ���ΪP������������ŵ��![]() ��������ã�
��������ã�
 ��
��![]() ����=2���� =0.01��
����=2���� =0.01��
��ˣ�
![]()
�����������![]() ����������·���֡�
����������·���֡�
��ϵͳ�����Ծ�źźͷ����źŵķ�������ͼ2��ͼ3��ʾ����ͼ2��ͼ3���Կ������������Ի�³�����Ʊȵ����ķ������Ի����Ƶĵ���ʱ��̣���������С����ϵͳ������������ţ���������ͼ4��ʾ����ͼ4���Կ������������Ի�³�����ƵĿ�����������PID�͵����ķ������Ի�����Ч��Ҫ�á�

ͼ2 ��Ծ��Ӧ������
Fig.2 Simulated result of step response

ͼ3 ������Ӧ������
Fig.3 Simulated result of square-wave response

ͼ4 ���ڰ���������ʱ���ֿ��Ʒ����Ա�
Fig.4 Comparison of different control methods by adding white noise
5 ����
��Ե绡¯�缫����ϵͳ��һ������ϵͳ�������˷������Ի��ķ�������ϵͳ�ķ����Բ��֣��������³������������ϵͳ���ڽ�С����ʱ������Ч�����Ƹ��ţ��Ż�ϵͳ���ܡ�ͨ���Ե���绡¯�缫����ϵͳ�ķ������������Կ������ÿ��Ʒ������ڹ��̽϶̣���������С��������������PID�͵����ķ������Ի�����Ч��Ҫ�á�����������ͬ�������ϵͳ��³�����ƣ����н�ǿ����������Ͳο���ֵ��
�ο����ף�
[1] �����, ��Ƽ, ��С��. �绡¯�ļ������Ӧģ��³������[J]. ������Ϣ�Ƽ���ѧѧ��, 2009, 24(4): 51-56.
ZHANG Xiang-jun, GUAN Ping, LIU Xiao-he. Indirect adaptive fuzzy robust control of arc furnace[J]. Journal of Beijing Information Science and Technology University, 2009, 24(4): 51-56.
[2] ������ �Ի�. BP�������PID�ڵ绡¯�缫����ϵͳ�е�ʵ��[J]. ���������ѧѧ��, 2010, 26(2): 50-53.
HUANG Liang, ZHAO Hui. Implementation of BP network rules PID in electrode regulator system of arc furnace[J]. Journal of Tianjin University of Technology, 2010, 26(2): 50-53.
[3] ������, ��ѩ��.��ͧ��̬����ϵͳ���о�[J]. Ӧ����ѧ����ѧ, 2006, 2(7): 806-811.
WANG Xiao-liang, SHAN Xue-xiong. Study of airship attitude tracking system[J]. Applied Mathematics and Mechanics, 2006, 2(7): 806-811.
[4] LI Lin-lin, YANG Guo-jun, ZHAO Chang-an. Robust controller design for satellite attitude tracking system[J]. Chinese Journal of Aeronautics, 2001, 14(2), 94-99.
[5] ��ҫ��, ��С��. ���ڷ������Ի��ĵ绡¯�缫����ϵͳ����[J]. ������Һѹ, 2008, 36(7): 264-267.
ZHANG Yao-hui, LIU Xiao-he. Control of regulator system of arc furnace based on feedback linearization[J]. Machine Tool & Hydraulics, 2008, 36(7): 264-267.
[6] Marino R, Tomei P. ������ϵͳ���[M]. Ҧ��, �ط绪, ��. ����: ���ӹ�ҵ������, 2006: 122-138.
Marino R, Tomei P. Nonlinear control design[M].YAO Yu, HE Feng-hua, transl. Beijing: Publishing House of Electronics Industry, 2006: 122-138.
(�༭ �°���)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(51077004)����������Ȼ��ѧ����������Ŀ(4082010)
ͨ�����ߣ���С��(1955-)���У����������ˣ���ʿ�����ڣ���ʿ����ʦ�����·�����ϵͳ���ƺ�����Ӧ���Ƶ��о����绰��13910235819��E-mail��liuxiaohe551026@163.com
ժҪ�����۵绡¯�缫����ϵͳ�ķ������Ի�³���������⡣Ӧ���ּ��ε����Է��������Ե绡¯�缫����ϵͳ�ķ����Բ��ֽ��д��������ڴ˻��������³��������������MATLAB���ַ��档�������������������Ի�³�����ƾ��и���ĸ������ܣ���������С����PID�͵����ķ������Ի�����Ч���á�
