
һ�ֻ��ڹ���ϵ�ͽ���������˶�������ʼ������
���ٲţ�л�ᣬ����ǿ���δ��ף��ܽ���
(����������ѧ �Զ���ѧԺ��������100081)
ժ Ҫ��
����λʧ�ǹ���Ӱ��Ѱ�����ȵ����⣬������ڹ�������ϵ�Ķ����������������У��ڻ��ڹ�������ϵ���˶����������������ϣ����ݺ�λ����켣������ԭ��������������DZջ�������·������ȵļ�С���ڴֶ�����ĵ�2��ͣ����������λ����������֤�����ֶ�������ڹ���ϵ�Ķ������;����м���ջ�������·������ؼ�С�˴ֶ��Զ��ȵ�Ӱ�죬��ǿ���س��Ļ�����������������˹ߵ�ϵͳ�Ķ����ȣ��ڹ����д��ڹ�����Ӧ��ǰ����
�ؼ��ʣ�
��ͼ����ţ�TP274+.1 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0473-05
SINS alignment algorithm with inertial frame for moving bases
SUN Shou-cai, XIE Ling, HAN Yong-qiang, SONG Chun-lei, ZHOU Jian-jun
(School of Automation, Beijing Institute of Technology, Beijing 100081, China)
Abstract: A new algorithm based on inertial frame was introduced in coarse alignment for SINS to reduce the azimuth error. In accurate alignment, an algorithm based on closed loop feedback system was used to reduce the position error caused by the second short stop and the azimuth error in coarse alignment. The results of aligning experiments show that the alignment algorithm with above-mentioned algorithms can reduce position error, and improve the alignment accuracy for SINS. It has a wide application prospect.
Key words: moving base; SINS; self-alignment; vehicle-based
���ý����ߵ�ϵͳ�ĵ���ϵͳ���ڽ��е�������֮ǰ������ɹߵ�ϵͳ�ij�ʼ������ʼ���ǽ��н������Ե�����ǰ�ᡣ��ʼ��һ���Ϊ�ֶ��;����������̣��ֶ���Ŀ���Ǹ������ľ����ṩһ����ȷ����̬��ʼֵ��������Ŀ���������������ϵb�������ο�����ϵn֮��������̬��ϵ����(![]() )�ij�ʼֵ��ȷ���㡣��ʼ���ֿɷ�Ϊ��ֹ�������˶�������ʼ���ȡ�Ŀǰ��½�ý������Ե���ϵͳ�����þ�������ʼ�������س����־�ֹ״̬�£�5~10 min������ɶ�����������Խϸߣ��������Բ������������������У���硢��Ա�ζ������������ŵȶ���Զ���������ϴ��Ӱ�졣Ϊ��߿��ٷ�Ӧ��������ǿ�س������ԣ�����[1]���һ�ֻ��ڹ�������ϵ���˶�������ʼ�����������ù�������ϵ��Ϊ�ο�ϵ������2��ͣ���۲��������ʸ���ڹ���ϵ�µı仯ʵ������ϵ�뱾�ص�������ϵ��̬�������⣬���ø��Է�λ�ǽ����̼Ƽ���λ�ñ仯������2��ͣ�������λ�ƶ�����λ�ñ仯������Ķ�ƫ����в��������ַ�����Ӱ��ϵͳ�����ȵ���Ҫ�����Ǹ��Է�λ�ǵIJ������ȼ�λ��������ʵ���س������£���ͳ�����ֶ������ĸ��Է�λ�����Ϊ5��~10�㣬���ܾ�ȷ���2��ͣ�����λ�ƽ���������Ӱ������ȡ������������������⣬������������ڴֶ���������ڹ�������ϵ�Ķ����������ھ����м��뷽λ�DZջ�������·���Ӷ���һ�����ϵͳ�˶�������ʼ�����ȡ�
)�ij�ʼֵ��ȷ���㡣��ʼ���ֿɷ�Ϊ��ֹ�������˶�������ʼ���ȡ�Ŀǰ��½�ý������Ե���ϵͳ�����þ�������ʼ�������س����־�ֹ״̬�£�5~10 min������ɶ�����������Խϸߣ��������Բ������������������У���硢��Ա�ζ������������ŵȶ���Զ���������ϴ��Ӱ�졣Ϊ��߿��ٷ�Ӧ��������ǿ�س������ԣ�����[1]���һ�ֻ��ڹ�������ϵ���˶�������ʼ�����������ù�������ϵ��Ϊ�ο�ϵ������2��ͣ���۲��������ʸ���ڹ���ϵ�µı仯ʵ������ϵ�뱾�ص�������ϵ��̬�������⣬���ø��Է�λ�ǽ����̼Ƽ���λ�ñ仯������2��ͣ�������λ�ƶ�����λ�ñ仯������Ķ�ƫ����в��������ַ�����Ӱ��ϵͳ�����ȵ���Ҫ�����Ǹ��Է�λ�ǵIJ������ȼ�λ��������ʵ���س������£���ͳ�����ֶ������ĸ��Է�λ�����Ϊ5��~10�㣬���ܾ�ȷ���2��ͣ�����λ�ƽ���������Ӱ������ȡ������������������⣬������������ڴֶ���������ڹ�������ϵ�Ķ����������ھ����м��뷽λ�DZջ�������·���Ӷ���һ�����ϵͳ�˶�������ʼ�����ȡ�
1 �˶������»��ڹ�������ϵ�� ��
���ؽ����ߵ�ϵͳ��ʼ����Ŀ������ȷ����������ϵb�뵼���ο�����ϵn֮��������̬��ϵ![]() ������ϵ���ڹ��Կռ������̲���������ϵ��ѡ���ʼʱ�̵���������ϵΪ����ϵ����
������ϵ���ڹ��Կռ������̲���������ϵ��ѡ���ʼʱ�̵���������ϵΪ����ϵ����![]() ������ϵ��������ϵ�ı仯���ɽ����������е���ͨ�����ַ��̣����Եõ�����ʱ�̵�
������ϵ��������ϵ�ı仯���ɽ����������е���ͨ�����ַ��̣����Եõ�����ʱ�̵�![]() ����ʽ(1)��
����ʽ(1)��
![]() (1)
(1)
tʱ�̵�����ʸ���ڹ���ϵi�е�ͶӰ��ʾΪ��
 (2)
(2)
���У�![]() Ϊͨ��������ƽ�õ�����̬�Ǿ���gΪ����������
Ϊͨ��������ƽ�õ�����̬�Ǿ���gΪ����������
ͣ��״̬�£�IMU��������ʸ��g�ڹ���ϵ�������һ���������˶�����ʼʱ��t0����ǰʱ��t��g�Ĺ켣�γ�һ���棬2��ʱ������ʸ���ֱ�Ϊ![]() ��
��![]() ����ͼ1��ʾ��
����ͼ1��ʾ��
��ʱ��t�ڣ�����ת��![]() �Ƕȣ�����ϵ(bϵ)��ԭ���Oi���е���On(b)��
�Ƕȣ�����ϵ(bϵ)��ԭ���Oi���е���On(b)��
��![]() ��
��![]() ��
��![]() ���ɼ���
���ɼ���![]() ��
��![]() ��
��![]() �����ԭ����Om���ֱ�ָ���ص���������ϵ����������ϵ����Ϊ�м��������ϵ(mϵ)����mϵ��iϵ��ת������Ϊ��
�����ԭ����Om���ֱ�ָ���ص���������ϵ����������ϵ����Ϊ�м��������ϵ(mϵ)����mϵ��iϵ��ת������Ϊ��
![]() (3)
(3)
��tm=(t-t0)/2ʱ�̣�mϵֻ����y��ת���ǶȦ¼��뵱ʱ���ص�������ϵL(tm)ϵ(NtmEtmDtm)�غϣ�����ϵ�任�ķ�����������Ϊ![]() ��
��
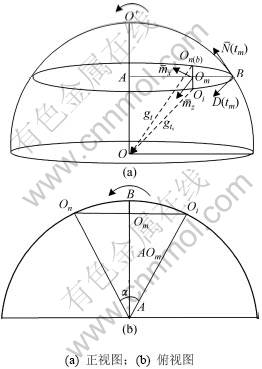
ͼ1 ʸ��g�ڹ���ϵ���˶�
Fig.1 Moving of vector g in inertial frame
ѡ�ñ��ص�������ϵ��Ϊ����ϵ��tmʱ�̵ĵ���ϵN(tm)�Ƶ�����ת����ת��/2�Ƕȼ��ɵõ�tʱ�̵ĵ���ϵN(t)����һ��ת��ͨ����Ԫ������ʵ�֣���Ӧ�ķ�����������Ϊ![]() ��
��
��ˣ��ɸ�����ʽ�����bϵ��Nϵ�ķ����� ����
![]() (4)
(4)
2 ��̼ƺ�λ����������ԭ��
�ڳ��غ�λ����ϵͳ���ٶȺ�λ�ü������Ƚ�С���������Ư�ƺ�С�����س���ʻʱ��϶̣�����Ϊ��̬���Ǻ���̼ƿ̶�ϵ��������س���ʻ������Ϊ��ֵ![]() ��
��![]() ���ɵ�
���ɵ�
![]() (5)
(5)
���У�![]() Ϊ��λ�����ۻ�λ�������س�����һȦ�ص�ԭ��ʱ��
Ϊ��λ�����ۻ�λ�������س�����һȦ�ص�ԭ��ʱ��![]() �����λ�����
�����λ�����![]() ҲΪ0��
ҲΪ0��
ͨ��ˮƽ��̬��![]() ��
��![]() ���Ƚ�С����һ���������ǵ�Ӱ��ã�
���Ƚ�С����һ���������ǵ�Ӱ��ã�
![]() (6)
(6)
����![]() ��
��![]() Ϊ������̬���ǡ�ʽ(6)��ˮƽ����ͶӰ�ɵã�
Ϊ������̬���ǡ�ʽ(6)��ˮƽ����ͶӰ�ɵã�
![]() (7)
(7)
Ϊ��������������ͨ���ߵ�ϵͳ����̼ƺ�λ�����2���켣Ϊr��r�䣬�ɴ˿���Ϊ��λ�����2���켣r��r�����ƣ���ͼ2��ʾ��
������r�����r�䣬����ri��d0ת���½��ٳ��Ա���ϵ��k���![]() ������d0Ϊԭ�㣬ri��
������d0Ϊԭ�㣬ri��![]() ������ֱ�Ϊ
������ֱ�Ϊ![]() ��
��![]() ���Ҧ½���С�ǣ���ʸ��ri��
���Ҧ½���С�ǣ���ʸ��ri��![]() ֮��Ϊ��
֮��Ϊ��
 (5)
(5)
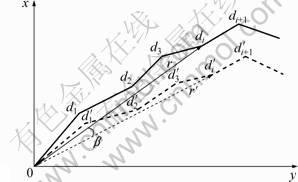
ͼ2 ��̼ƺ�λ����������
Fig.2 Similarity of DR algorithm with speedometer
ͨ����λ�DZջ�������·���㵥��ת���Ǧ£��������������ι켣��������ϱ������λ�����Ӷ���һ���������س���2��ͣ��λ�ñ仯����ķ�λ����
3 ������
�˶�������ʼ��Ŀ����Ҫ���ﵽ��2��ͣ��֮��ɻ�����ʻ��������������ͣ��λ�ñ仯�Է�λ�����Ӱ�죬���γɷ�λ�����Է�λ�ǵIJ����ɸ����ϱ��Ͷ�����������λ�������㡣
�ɶ����������λ�Ʀ�ew����ķ�λ�����Ϊ
![]() (8)
(8)
2��ͣ�������������λ�Ʀ�ew�Դ�t0ʱ�̵�tʱ��������ת���ĽǶȦ�����Ӱ�졣
����������������
![]() (9)
(9)
�ϱ��������λ�Ʀ�sn����ķ�λ�����Ϊ��
![]() (10)
(10)
��λ����һ�β����ǿ�������ϵͳ����ͼ3��ʾ�������������ڣ���˴ֶ������ĸ��Է�λ�����ϴ�λ���ǵIJ������Ƚϵ͡�
�ջ�����ϵͳӦ�÷����������ֶ������ĸ��Է�λ�ǣ��Լ�С���Է�λ�ǵ�����С��̼ƺ�λ���㶫������ϱ������λ�Ƶ����Ӷ�����������ȣ����ǿɸ�����̼ƺ�λ����������ԭ�����бջ���λ�������������ͼ4��ʾ��
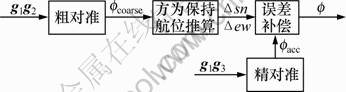
ͼ3 ��λ���ǿ�������ԭ��ͼ
Fig.3 Azimuth error compensation with open loop algorithm

ͼ4 ��λ���DZջ���������ԭ��ͼ
Fig.4 Azimuth error compensation with closed loop feedback system algorithm
���巽�����£��ڳ�������ǰ����ʼʱ�̣��ߵ�ϵͳ�ӵ磬��������ƽ���������ʸ��g1��֮���϶�ʱ����(Լ30 s)����е�2����������ƽ��������ʸ��g2����g1��g2����ǰ����ԭ���ɼ����ʧ�Ǻ�С�ĸ��Է�λ�ǣ�Ȼ���м�����س�������ʻ�����ý����ߵ�ϵͳ�����¼��̬�仯�������ý���ķ�λ�ǣ������̼�������к�λ���㣬���㶫������ϱ������λ�ƣ�������ʻһ��ʱ���ʱͣ�����ٴ���������ƽ��������ʸ��g3�����������ͬʱ����g1��g3���ö�ԭ����������ϵ�뵼��ϵ�Ĺ�ϵ�����������λ����Ϣ������̼ƺ�λ����������ԭ�����ж�η�λ�DZջ�����������ʵ���˶�������ʼ����
4 �ܳ�����
�����豸��Ҫ�ɹ��Բ�����Ԫ(IMU)���������������̼ƺ���λ��������ɡ����й��Բ�����Ԫ(IMU)�ɶ�Ƶ�����������ݺ�ʯӢ���Լ��ٶȼ���ɣ��ֱ����ڲ����س��Ľ��˶���Ϣ�����˶���Ϣ����ͼ5��ʾ��ѡ��PC104�ĵ�����������Բ�����Ԫ(IMU)����źž�����Ч��������뵼�����㣬ʵʱ������س�����̬���뷽λ�ǵ���Ϣ����̼���Ҫ�������к�λ���������س���λ����Ϣ����λ����װWindows����ϵͳ�����˶�������ʼ������Ӧ�����������õ�������������������̬λ����Ϣ���ж����㡣����ʵ���豸��װ���ƶ�����ƽ̨�ϣ���ͼ6��ʾ��
�ܳ�����·��ѡ���ڱ���������ѧ�����������ϣ��ܳ���·ͼ��ͼ7��ʾ��ȫ�̴�Լ15 km�����У�2��ͣ��A���B���λ�þ���DGPS ���������Ϊ0.11 m���������ij�ʼ���������£��س���A�㴦װ�ظõ������꣬�ڷ��������������ֳ���ԭ�ؾ�ֹ״̬�£�����30 s�Ĵֶ���ø��Է�λ�ǣ�Ȼ��ʻ��B�㣬���ʱ�ٴﵽ80 km/h��Լ13 min���س�ʻ��B��ͣ��15 s����з�λ���DZջ������벹�������������õ���״̬�µ���̬�Ǻͷ�λ�ǡ�
��ϵͳ�ľ�������ʼ���ľ���Ϊ0.045�㣬��˿����Ծ��������ķ�λ��Ϊ�ο�������������ʼǰ����ɺ�������ԭ�ؾ�ֹ״̬�·ֱ����3�ξ�������ʼ������ȡƽ��ֵ��Ϊ��ʼ���ο�ֵ�����鰴���ϲ������5�飬ͬʱ�洢��������й������(IMU)����̼Ƶ�����ʵʱ���ݣ�Ȼ��ͨ�����߷�����㣬�ɼ���ó��ڴ�ͳ�����ֶ��벻���÷�λ�����ջ������Ķ�������ʼ�������

ͼ5 ��������ߵ�ϵͳ
Fig.5 Strapdown inertial navigation system (SINS)

ͼ6 ���鳵
Fig.6 Vehicle with SINS
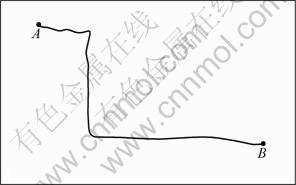
ͼ7 �ܳ�����·��ʾ��ͼ
Fig.7 Circuit diagram of experiments
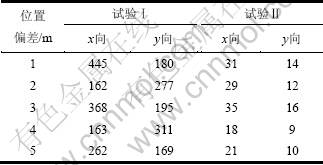
�������ô�ͳ�����ֶ��Ҳ����÷�λ�����ջ����������߷��棻�������û��ڹ���ϵ�Ĵֶ��������÷�λ�����ջ����������������1~3��ʾ��
�ӱ�1���Կ��������ù���ϵ�ֶ��ķ�λ���ȿ��Դﵽ1�����ڣ�ԶС�ڲ��ô�ͳ�����ֶ��ľ��ȡ��ӱ�2���Կ��������÷�λ�����ջ�����������ķ�λ�Ƕ����ȿ��Դﵽ0.06�㣬�������ڲ��õ��β����Ķ����ȡ��ӱ�3���Կ�����������̼ƺ�λ����켣������ԭ����αջ�������λ�������λ�ö�λ��������Լ�С�������λ���������ȡ�
��1 2�����������µĴֶ����
Table 1 Azimuth error with two experimental conditions in coarse-alignment

��2 2�����������µĶ����������
Table 2 Azimuth error with two experimental conditions in alignment

��3 2�����������µĶ�λ���
Table 3 Position error in two experimental conditions
6 ����
�˶�������ʼ�ֶ���Ӧ�û��ڹ���ϵ�Ķ�����������������ջ��������ڣ�����ʵ�����س����˶������µij�ʼ���������������س��Ļ����ԺͿ��ٷ�Ӧ���������ң�ͨ������ջ��������ڣ���������˶�λ���ȣ�ͬʱ����ǿ�˶Դֶ����ݴ��ԣ������ϵͳ�Ķ����ȡ�
�ο����ף�
[1] ������, ������, ����ƽ, ��. ����SINS�н����ʼ������[J] .�й����Լ���ѧ��, 2007, 15(2): 156-159.
LIAN Jun-xiang, WU Wen-qi, WU Mei-ping, et al. SINS initial alignment algorithm for marching vehicles[J]. Journal of Chinese Inertial Technology, 2007, 15(2): 156-159.
[2] Napolitano F, Gaiffe T, Cottreau Y, et al. PHINS: The first high performances inertial navigation system based on fiber optic gyroscopes[C]//Proceedings of 9th Saint Petersburg International Conference on Integrated Navigation systems. Saint Petersburg, 2002: 296-304.
[3] ������. �����ߵ����������·���������������Ƽ����о�[D]. ��ɳ: �����Ƽ���ѧ���繤�����Զ���ѧԺ, 2007: 11-20.
LIAN Jun-xiang. Research on a new moving-base alignment approach and error depression of strapdown inertial navigation system[D]. Changsha: National University of Defense Technology. School of Electrical Engineering and Automation, 2007: 11-20.
[4] �Ϲ���, ����Ԫ, ����Ƽ. ���ص���ϵͳ��̬�߾��ȳ�ʼ������[J]. ϵͳ��������Ӽ���, 2006, 28(9): 1404-1407.
YAN Gong-min, QIN Yong-yuan, MA Jian-ping. High precision dynamic initial alignment technique for vehicular navigation system[J]. Systems Engineering and Electronics, 2006, 28(9): 1404-1407.
[5] Lingjuan M, Jun S, Wei L, et al. Initial alignment technique for SINS of vehicles in the moving state[J]. Journal of Beijing Institute of Technology, 2002, 11(3): 234-239.
(�༭ �Կ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��������Ȼ��ѧ����������Ŀ(2005-2010)
ͨ�����ߣ����ٲ�(1986-)���У�ɽ�������ˣ�˶ʿ�о��������µ����Ƶ�������о����绰��15210515770��E-mail��sunshoucaibit@yahoo.cn
ժҪ����Դ�ͳ�����ֶ���λʧ�ǹ���Ӱ��Ѱ�����ȵ����⣬������ڹ�������ϵ�Ķ����������������У��ڻ��ڹ�������ϵ���˶����������������ϣ����ݺ�λ����켣������ԭ��������������DZջ�������·������ȵļ�С���ڴֶ�����ĵ�2��ͣ����������λ����������֤�����ֶ�������ڹ���ϵ�Ķ������;����м���ջ�������·������ؼ�С�˴ֶ��Զ��ȵ�Ӱ�죬��ǿ���س��Ļ�����������������˹ߵ�ϵͳ�Ķ����ȣ��ڹ����д��ڹ�����Ӧ��ǰ����
