
����Matlab�Ķ�Լ���Զ�ƽ�в����켣�滮
���1������1, 2��������1�������1
(1. ���ϴ�ѧ ���������Ƚ������������ص�ʵ���ң����� ��ɳ��410082��
2. ���ִ�ѧ ��̬ģ������ص�ʵ���ң����� ������130022)
ժ Ҫ��
���ص㣬�����й켣��������������µĹ켣������ͨ����ʵ�ʲ����켣�����֤���ú����Ŀ����ԡ��������������д��ڵĿ�����ײ�㣬������Ӧ�ı�ײԼ���������Բ��������ϰ�Լ����������������Լ����������ʼ�㷽λԼ���������յ�λ��Լ��Ϊ�켣������Լ���������Բ����յ㳵���복λ�н���СΪĿ�꺯��������Ŀ���Լ���켣���̡��ֱ��һ�㲴����������С�ռ䲴���������в����켣�滮������Matlab����������Լ���Ż�������ù켣��������������������������һ�㲴���������÷��������㲴���켣���������ԣ�ʹ��������ײ���복λ����ʹ�����복λƽ�У�������С�ռ䲴����������δ��ʹ�����복λƽ�У���ʵ���˳�������ײ�ز�����λ����֤�켣���ʵ������ԡ��ɴ˿�֪�÷�����ʵ�ֳ�������ײ�ز�����λ��������켣����������Ҫ����Ч�ؽ���˲���������ͣ��ת�����⡣
�ؼ��ʣ�
�켣�滮���Զ���������ײ����Լ�����Ż���
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2013)01-0101-07
Trajectory planning of automatic parallel parking with multi-constraints based on Matlab
LI Hong1, GUO Konghui1, 2, SONG Xiaolin1, LI Feilong1
(1. State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body, Hunan University, Changsha 410082, China;
2. State Key Laboratory of Automobile Dynamic Simulation, Jilin University, Changchun 130022, China)
Abstract: Parking trajectory characteristics were analyzed, and a new trajectory function was proposed based on the known trajectory functions. It was proved that the new function was feasible for trajectory planning by parking trajectory fitting comparison. Potential collision points were analyzed and constraint equations were established accordingly. The orientation constraints at the start point, the location constraint at the parking point and the restriction of vehicle were considered, and the constraint equations were established respectively. Parking trajectory optimization function was presented to minimize the vehicle orientation angle at the parking point with restrictions mentioned above. The approach was used by trajectory planning for general parking space and tight parking space, and the trajectory function was solved using Matlab software. The simulation results show that the car can reverse into parking set safely in general parking space, with the continuously trajectory curvature and the car paralleled with the parking set at the parking point. This approach fails to make the car paralleled with the parking set in tight parking space, but the car can move into parking set safely with the continuous trajectory curvature. It is proved that the approach proposed can find a collision-free path in different parking spaces and meet the demand of continuous trajectory curvature, so the problem of shutting down to steer the wheel in parking process is solved.
Key words: trajectory planning; automatic parking; collision-free; multi-constraints; optimization
�Զ���������(auto-parking system, APS)������������������Ҫ��ɲ��֣���Ŀ���Ǹ������������ʻԱ��ɳ����İ�ȫ��λ������������ҵ�ķ�չ�����ó������ռ������в����ռ�Խ��ԽС�������˼�ʻԱ���������ѣ���ˣ��Զ������������������ܼ�������������Ҫ��������ѧ�߶��Զ����������������о����磺Mukherjee��[1]���Զ������ķ�����Լ��·���滮�������о���Divelbiss��[2]�Գ����켣���ٿ��ƽ������о���Chang��[3]����ģ�����Գ����������Զ��������ƣ�Paromtchik[4]�о����Զ�������ת���ٶȵ�Ҫ��Zhao��[5]����ģ��������С�ռ䲴��³���Խ������о���Young��[6]���ڸĽ���ģ�������ƶ�δ����Odometry���Զ�����³�������о���Lee��[7]�����˻��ڹ켣���ٿ������IJ��������о����Ż�[8]�����˽γ��Զ�����ת����Ƽ����Ƶ��㷨��ģ�����㷨�о���κ�Ի�[9]�����˻����Ӿ��ij������ϰ������㷨�о����ν����[10]�ں϶���ѧԼ�����Զ�ƽ�в����켣�������о�������[11]����ģ�������Զ�ƽ�в���ת���������������ƣ�������[12]������ƽ̹���������۽��������������켣�滮�о���Ŀǰ��ֻ������������˾����ڡ������ŵ���ѿ�������ص��Զ�������Ʒ����������װ���ߵ��γ��У����ҹ���δ������֪ʶ��Ȩ���Զ�����ϵͳ��·���滮���Զ�����ϵͳ�е���Ҫ��ɲ��֣�Ϊ�ˣ��������߶Զ�Լ������µIJ����켣�����о���
1 �Զ�����ϵͳ��������
�Զ�����ϵͳ����������ͼ1��ʾ���Զ�����ϵͳ���������ص�·������ʻ��ͨ����������֪����������Ϣ�����ͣ���ռ估�����ϰ�����ͣ���ռ��С��������Ҫ���������ʻ���ҵ����㲴���ռ�Ҫ��ij�λ��ȷ��������ʼ�㼰Ŀ��λ�ã����������켣���꣬���ݻ����ϰ���Ϣ������������Ϣ�滮����·�������滮�ɹ�������ʾ��ʻԱ�Ƿ��ȡ�Զ������������ɹ����������ʻ��Ѱ����һ����λ������·���滮�ɹ�������ʻԱ�����Զ�����������ϵͳ���Ƹ��ݴ������ɼ��ij��ټ������ϰ���Ϣ���Ʒ�������ɲ���������ʻԱ�������Զ����������Զ�����ϵͳ�رա����⣬�Զ�����ϵͳ���豣֤��ʻԱ����ʱ�ӹܲ����Ƴ������Ա�֤���������еİ�ȫ�ԡ�
�Զ�ƽ�в����Ĺ켣�滮������������£���������ʼ������ֹ��֮���ҵ�1�����ʲ�����1/Rmin(RminΪ������Сת��뾶)ƽ�������ߣ�ʹ�����ظù켣�˶�ʱ������Χ���巢����ײ��Ϊ������ڲ���������ԭ��ת��Ҫ����������������Ϊ������ڲ�����ʼ��ԭ��ת����Ҫ�����߳�ʼ���ʾ���С����Ϊ0������ͣ�ŵĹ淶��Ҫ����Ӧ���������복λƽ�У��ʲ����켣�������յ㴦�������복λ�Գ��нǾ���С��������ʽ�ɸ��ݳ�λ�����Ϊƽ�в�������ֱ������б�������ݲ������ӳ̶ȿɷ�Ϊ����ʽ�����Ͷ�ν���ʽ���������Ľ��Ժ���ʽƽ�в��������о���
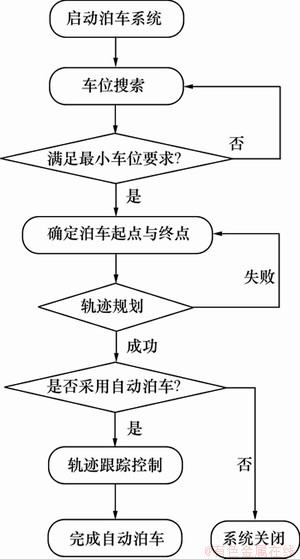
ͼ1 ƽ���Զ�����ϵͳ��������
Fig.1 Flow chart of parallel parking process
2 �����켣�滮
2.1 �����켣����
���Զ����������У�Ϊ����ͣ��ת����ɵ���̥ĥ��Ҫ���켣���������������ҹ켣�������Ϊ0����С���Խ��ͳ��ֳ�ʼת��ǣ�ͬʱ�������켣������ʼ�����߾��������복λ������ƽ�У��Խ��ͶԳ���������ʼ��λ�ǵ�Ҫ������[11]��ѡ��Sigmoid�����뷴���к���Ϊ�����켣������
 (1)
(1)
 (2)
(2)
ʽ(1)��(2)������켣�������ʵ������ԣ�����������켣���ΪС���ʻ������ʵ�Ҫ�ʳ���ԭ��ת�����⣬�ҹ켣��ʼ�������복λ�����нǽϴ�������нϴ�ij�ʼ��λ�Dz��ܳɹ�����ͣ����λ���ۺϿ��Ƿ����к���������ʽ����������origin�����Զ��幫ʽ��Ϲ��ܱ༭�����������еIJ����켣���߽�����ϲ��Ľ����ó��µĹ켣��Ϻ�����

 (3)
(3)
ͨ����ijһ�����켣�������ͼ��ͼ��֪���ù켣�����������㲴���켣���������Լ���ʼ��С���ʻ������ʵ�Ҫ���ҳ�ʼ�������복λ�����нǽ�С��
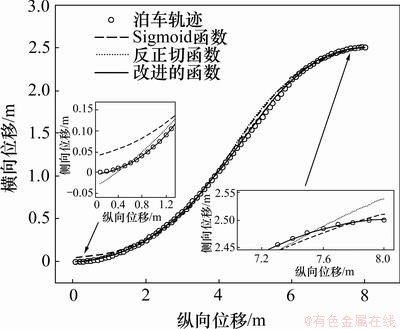
ͼ2 3�������켣��Ͻ���Ա�
Fig.2 Fitting result of three functions
2.2 �����������Լ���켣ģ��
�켣�滮���ҵ�1��ƽ�����������ߣ���������������������ʻʱ���ƹ���Χ�������ϰ�����ȫ�ؽ���ͣ��λ�У���ˣ��ڽ��й켣�滮ʱ������Ӧ�Բ��������е��ϰ�Լ�����з�����
ѡ������е�켣Ϊ���IJ����켣�滮�����Ըõ��ʼλ��Ϊ����ԭ�㣬������е�켣�յ�Ϊ(so-Lr��ho+W/2)����ͼ3��ʾ��ͼ3�У�soΪ�����е�λ���߾��룻hoΪ�����е���ϰ��������룻hΪ·����LrΪ�����е�����˾��룻LfΪǰ���е���ǰ�˾��룻LΪ������ࣻWΪ������L1��L2�ֱ�Ϊ��λ���Ϳ���A��B��C��D�ֱ�Ϊ�����Һ�˵㡢��ǰ�˵㡢��ǰ�˵�����˵㣻��Ϊ������λ�ǣ���Ϊǰ���е��Чת�ǡ�
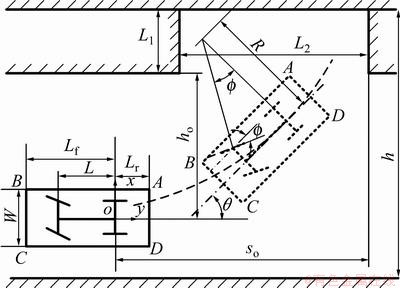
ͼ3 ƽ�в�������ʾ��ͼ
Fig.3 Parameters of parallel parking process
�ɺ����е�켣�����ɵò��������г���������㷽λ�Ǧȼ����ʦ�Ϊ��
 (4)
(4)
 (5)
(5)
�ɼ��ι�ϵ�ɵ�A��B��C��D������е��ƶ��켣Ϊ��
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
��������Χ�ϰ��п��ܷ�����ײ��λ�ù���4����(a) ��������������������·�߽����ײ�����������ʻ���������ײ��(b) �������복λǰ���Ҳ��ϰ�����߳�������ײ��(c) �������복λ����ǰ�����Ҳ��ϰ������ǰ����λ�еij�������ײ��(d) �������복λ���Һ�����Ҳ��ϰ�����ߵ�·�߽����ײ����ͼ4��ʾ��
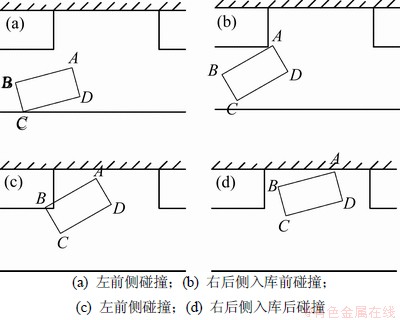
ͼ4 ���������г���������ײ��ʾ��ͼ
Fig.4 Possible collision points in parallel parking
Ϊ���������Χ�ϰ�����ײ���켣��������������Ҫ��
��xA��[0 so-L1]ʱ��yA��ho��
��xA��[0 so-Lr]ʱ��yA��ho+L2��
��xB��[0 so-L1]ʱ��yB��ho��
��xB��[0 so-Lr]ʱ��yB��ho+L2��
��x��[0 so-Lr]ʱ��yC��ho+L2-h��
��x=so-Lrʱ��yC��ho��
��x=so-Lrʱ��yD��ho��
Ϊʹ�켣����ͨ��������ʼ�����ֹ�㣬����������Ҫ��
��x=0ʱ��y=0��
��x=so-Lrʱ��y=ho+L2/2��
Ϊ������ڲ����ڳ�ʼ��ԭ��ת��λ�����⣬����������Ҫ��
��x=0ʱ����=0��
��x=0ʱ����=0��
Ϊ����ͣ���Ĺ淶�ԣ��켣�յ㷽λ��Ӧ��С���Ϊ0����������Լ�����¡�
��Ackerman��ϵ��֪��
 (10)
(10)
 (11)
(11)
��ʽ(5)��(10)��(11)�ɵ�ǰ��ת�ǣ�
 (12)
(12)
 (13)
(13)
 (14)
(14)
��ʽ(13)~(14)�ɵã�
 (15)
(15)
�������ܵ�Լ����Ҫ������2�����棺
(1) ��Сת��뾶Լ�����������е�켣���ʦѡ�1/Rmin��
(2) ����ת�ǽ��ٶ�Լ������ ��
��
��ˣ�������������Լ����
��x��[0 so-Lr]ʱ�� ����
����  ��
��
�Բ����յ㷽λ����С��ΪĿ�꽨���������Լ���켣���̣�

 (16)
(16)
3 ����ʵ��������
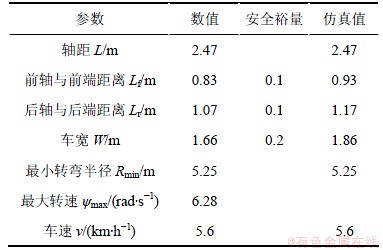
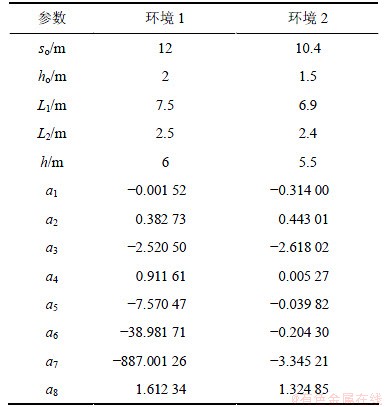
����ʵ���Զ������д������IJ�����Ϊ��֤�����İ�ȫ�ԣ�ѡ��ȫ����[13]���������γߴ�����0.1 m��������������ȫԣ������1����������Լ����ѧģ�ͣ�������[14]��ѡ��һ�㲴����������С�ռ䲴���������������ֱ������в����켣�滮������Matlab���������Զ�Լ���Ż�����fmincon�����Ӧ�����켣���������������������2���ݷ���ģ�����÷�������ͼ5��ͼ6��
��1 ��������
Table 1 Vehicle parameters
��2 �����������켣����
Table 2 Parameters of parking environment and trajectory functions
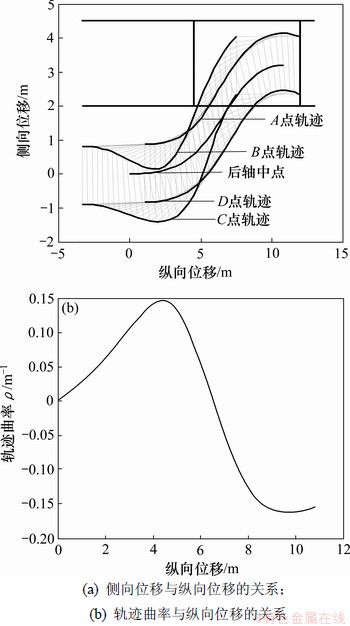
ͼ5 ����1�в����켣������
Fig.5 Parallel parking trajectory and curvature curves in the first condition
��ͼ5��ʾ�IJ����켣��֪�����������������У���������������Χ�����ϰ����㣬��֤������ʵ��������ײ�ؽ��복λ�����Ҳ������������복λ����ƽ�У������˶��Զ�����ϵͳ�����淶��Ҫ���ɲ����켣���ʿ�֪���켣���������仯�ҳ�ʼ�㴦����Ϊ0������˲�����������ͣ��ת������⡣�ɳ�����Сת��뾶��֪�����켣���ʲ�����1/Rmin����0.191���ɹ켣�������߿�֪���켣������[-0.19,0.19]��Χ�ڣ����㳵����Сת��뾶Լ������ͼ6��֪�����ڲ����ռ�����ƣ�����������δ��ʹ�����복λƽ�У���ʵ��������ײ�ؽ��복λ�������˱���Լ��Ҫ���ɹ켣�������߿�֪���켣���������仯����ʼ�㴦����Ϊ0.005 7 m-1����������ʼת��Ϊ0.41�㣬�ɺ��Բ��ƣ��켣������[-1.9,1.9]��Χ�ڣ������˳�����������Լ������˿�֪���������ռ��㹻��ʱ������ͨ�������������һ�麯����������1�����㳵������Լ���ͳ�����Сת��뾶Լ�������Ĺ켣���ߣ���ʵ�ʲ��������У�ͨ����������λ���жϺ��ʵķ�����ת�ǣ��������ڷ�����ת�ǣ�ʹ���������е������滮�Ĺ켣�ƶ�ʵ�ֳ�����ȫ���복λ���Ҿ��й淶����������
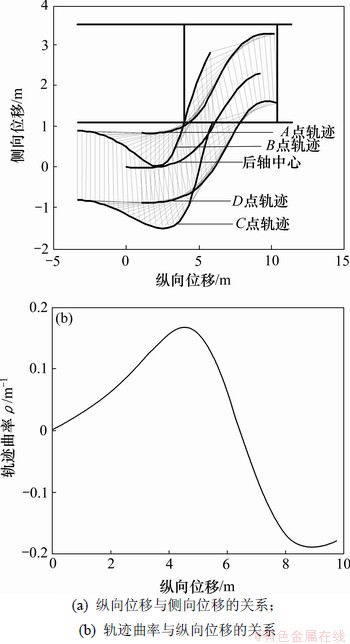
ͼ6 ����2�в����켣���켣����
Fig.6 Parallel parking trajectory and curvature curves in the second condition
4 ����
(1) Ϊ���Ⲵ��������ͣ��ת���������̥��ĥ�������в����켣��������������µIJ����켣��������ͨ����ʵ�������켣���ߵ���϶Ա�֤�������ߵĿ����ԡ�
(2) �Բ��������п�����ײ����з�����ͨ�������˶�ѧ��ϵ��������Լ���������Գ�����ʼλ�ü���λ��Լ�����з���������λ�ü��Ƕ�Լ�����������ݳ�����������Լ�������������켣��Сת��뾶Լ��������Ϊ���㲴���淶�ԣ�ѡ��켣�յ㴦�����복λ�н���СΪ�Ż�������������Ŀ���Լ�������켣���̡�
(3) ѡ��2�ֲ�������������Matlab�����������Լ���Ż�������Ⲵ���켣���̣��õ����й켣���ߡ��������������������ռ��㹻��ʱ��ͨ���÷����������1���켣���߿�ʹ��������ײ�ؽ��복λ�����복λ����ƽ��ͣ�ţ��������ռ���Сʱ��������ù켣���ߣ���������Ȼ���ܱ�֤����ͣ�ŵĹ淶�ԣ����ܱ�֤��������ײ�ؽ��복λ�������˲�����ȫ��Ҫ��
(4) ��Բ����ֱ�ߡ�Բ���켣�滮������ȣ��÷����õ��IJ����켣��������������˲�����������ԭ��ת������⣬������ת�����Ĺ�����������̥ĥ����ģ����������������������ʵ�飬��ʡʱ�������Ч�ʣ���Ϊ�Զ������ṩһ���ο���
�ο����ף�
[1] Mukherjee R, Anderson D P. A surface integral approach to the motion planning of nonholonomic systems[J]. ASME Journal of Dynamic Systems, Measurement and Control, 1994, 116(9): 315-325.
[2] Divelbiss W A, Wen J T. Trajectory tracking control of a car-trailer system[J]. IEEE Transactions on Control Systems Technology, 1997, 5(3): 269-278.
[3] Chang S J, Li T H S. Design and implementation of fuzzy parallel-parking control for a car-type mobile robot[J]. Journal of Intelligent and Robotic Systems, 2004, 34(2): 175-194.
[4] Paromtchik I. Steering and velocity commands for parking assistance[C]//Proceedings of the 10th IASTED International Conference on Robotics and Applications. Honolulu, Hawaii, USA, 2004: 178-183.
[5] ZHAO Yanan, Jr Cdlins E G. Robust automatic parallel parking in tight space via fuzz logic[J]. Robotics and Autonomous Systems, 2005, 51: 111-127.
[6] Young W R, Se Y O, Senior M. Robust automatic parking without odomety using enhanced fuzzy logic controller[J]. IEEE International Conference on Fuzzy System. Vancouver B C, Canada, 2006: 521-527.
[7] Lee K, Kim D, Chung W, et al. Car parking control using a trajectory tracking controller[C]//SICE-ICASE International Joint Conference. Bexco, Korea, 2006: 2058-2063.
[8] �Ż�. �γ��Զ�����ת����Ƽ����Ƶ��㷨��ģ�����㷨�о�[D]. ����: ���ִ�ѧ��������ѧԺ,2007: 11-57.
ZHANG Hui. Research on geometry algorithm and fuzzy logic for automatic garage parking of sedan[D]. Changchun: Jilin University. College of Automotive Engineering, 2007: 11-57.
[9] κ�Ի�. �����Ӿ��ij������ϰ������㷨�о���ʵ��[D]. ����: ������ѧ��Ϣ��ѧ�빤��ѧԺ, 2008: 19-59.
WEI Yanhua. Research and implementation of vehicle back-over obstacle detection algorithm based on vision[D]. Shenyang: Northeastern University. College of Information and Engineering, 2008: 19-59.
[10] �ν���, ����, ������, ��. �ں϶���ѧԼ��������ƽ�в����켣���ɷ���[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2009, 40(1): 135-141.
SONG Jinze, DAI Bin, SHAN Enzhong, et al. Trajectory planning approach of autonomous parallel parking with kinodynamic constraints[J]. Journal of Central South University: Science and Technology, 2009, 40(1): 135-141.
[11] ����. �Զ�ƽ�в���ϵͳת����Ʋ��Ե��о�[D]. ����: ���ִ�ѧ��������ѧԺ, 2010: 25-105.
JIANG Hui. Research on strategies of automatic parallel parking steering control[D]. Changchun: Jilin University. College of Automotive Engineering, 2010: 25-105.
[12] ������. ������ƽ̹���������۵����������켣�滮�о�[D]. ��ɳ: ������ѧ������ѧ���繤�����Զ���ѧԺ, 2009: 32-61.
SHAN Enzhong. Research on trajectory planning of auto-parking based on differential flatness and spline theory[D]. Changsha: National University of Defense Technology. College of Mechatronic Engineering and Automatic, 2009: 32-61.
[13] Moritz O. Parkmate enhanced odometry[D]. Zurich: Swiss Federal Institute of Technology Zurich, Department of Information Technology and Electrical Engineering, 2004: 47-76.
[14] JGJ 100��98, �����⽨����ƹ淶[S].
JGJ 100��98, Design code for garage[S].
(�༭ �²ӻ�)
�ո����ڣ�2011-11-28�������ڣ�2012-03-15
������Ŀ��������Ȼ��ѧ����������Ŀ(51175159)������ʡ�Ƽ��ƻ���Ŀ(2012GK3161)
ͨ�����ߣ����(1984-)��Ů��ɽ�������ˣ���ʿ�о���������������̬ģ��������о����绰��15604465313��E-mail: lihong3729@163.com
ժҪ�����������켣�����ص㣬�����й켣��������������µĹ켣������ͨ����ʵ�ʲ����켣�����֤���ú����Ŀ����ԡ��������������д��ڵĿ�����ײ�㣬������Ӧ�ı�ײԼ���������Բ��������ϰ�Լ����������������Լ����������ʼ�㷽λԼ���������յ�λ��Լ��Ϊ�켣������Լ���������Բ����յ㳵���복λ�н���СΪĿ�꺯��������Ŀ���Լ���켣���̡��ֱ��һ�㲴����������С�ռ䲴���������в����켣�滮������Matlab����������Լ���Ż�������ù켣��������������������������һ�㲴���������÷��������㲴���켣���������ԣ�ʹ��������ײ���복λ����ʹ�����복λƽ�У�������С�ռ䲴����������δ��ʹ�����복λƽ�У���ʵ���˳�������ײ�ز�����λ����֤�켣���ʵ������ԡ��ɴ˿�֪�÷�����ʵ�ֳ�������ײ�ز�����λ��������켣����������Ҫ����Ч�ؽ���˲���������ͣ��ת�����⡣
