
DOI: 10.11817/j.issn.1672-7207.2016.07.011
����Сֱ���ܵ�����̽�˵Ĵ��������÷����Ż�
��ΰ1��������2��������1��л��2���쿡2������ǿ1��Ф����2
(1. �㶫������˾������ѧ�о�Ժ���㶫 ���ݣ�510080��
2. �人��ѧ �������еѧԺ������ �人��430072)
ժ Ҫ��
�Ե����ر��ڽ����ܵ���Ƶɢ���ԡ�ģ̬ת����ȱ�ݶ�λ��Ӱ����ɡ��䲽��Ϊ�����ȣ�����ANSYS������������Сֱ������ȱ�ݹܵ���ȱ�ݹܵ�����Ԫģ�ͣ�����˲̬����ѧ�����������Թܵ��˲�������ڵ�ʩ������˲ʱλ���غɣ�ģ�ⳬ������������L(0,2)ģ̬������������-�ز��źŵ�ʱ���������ߣ�����ز��ֱ��ʡ�����ϵ������Σ�����ȱ�ݵ�����λ�þ����Լ�4�ִ��������÷����Ե���Ƶɢ��ģ̬ת��������λ�ͷ���ϵ����Ӱ�졣�о�������������Ӵ�������������Ч��������ģ̬�͵���Ƶɢ�ķ���������ǿ�ز��źŵķ�ֵ��������������С��4��ʱ�����Զ�����ȱ�ݽ�������λ������ϵ���洫�������������ӳ���������
�ؼ��ʣ�
�ܵ���������������������Ƶɢ����������ϵ����
��ͼ����ţ�TM8��TM113 ���ױ�־�룺A ���±�ţ�1672-7207(2016)07-2254-06
Optimization of guided wave sensors distribution along thin-walled small-diameter pipe
WANG Wei1, YOU Penghui2, ZHONG Wanli1, XIE Tao2, XU Jun2, ZHONG Liqiang1, XIAO Xiaohui2
(1. Electric Power Research Institute of Guangdong Power Grid Company, Guangzhou 510080, China;
2. College of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract: The influence of sensor distribution scheme on the frequency dispersion characteristics, modal conversion and defect localization of guided wave along thin-walled metal pipe was investigated. The procedures were as follows. Firstly, the models of defective and non-defective finite element pipes were built using ANSYS software. Axial displacement was exerted to circumferential nodes in the end of pipe based on the transient dynamic analysis methods, and ultrasonic sensor activating L(0,2) mode was simulated. Then, according to time-history curves of the pulse-echo, characteristic parameters such as echo resolution and reflection coefficient were defined. Secondly, the axial defect location precision, as well as the influence of four sensor distribution schemes on the guided wave dispersion, modal conversion, circumferential localization and reflection coefficient were analyzed. The results show that bending modal and wave dispersion can be inhibited effectively while amplitude of echo signal can be amplified by adding sensors. It is difficult to locate crack defects circumferentially when the number of sensors is less than 4.And the reflection coefficient increases linearly with the increase of the number of sensors.
Key words: pipe; guided wave; sensor distribution; dispersion characteristics; reflection coefficient
���ڽ����ܵ��ڷ��۹��������ڸ�ʴ���ϻ���������ɵ�ȱ�ݳ������¹ܵ�����й©�¹ʣ�������ɾ�����ʧ�����Ҷ���̬���������в����ˣ�ȱ�ݼ��Թܵ���ȫ������Ҫ����Խ����ܵ�ȱ�ݣ���������һ����Ч�ļ���;�������г�����������д������Զ�����Ч�ʸߵ��ŵ���й�����Ӧ��ǰ����������������������⼼����չѸ�٣�Ƶɢ���Ժ��źŴ�����ֵ�ǹܵ�ȱ�ݼ�����ҪӰ�����أ�������������������ѡ���벼�÷������о��Ĺؼ����ڵ������۷��棬FLETCHER��[1]���ù�ͬԴ(CSM)�ķ����ϳɼ��е�����ʹ����ϵ������1���������ȱ�ݼ��������ȣ�DEMMA��[2]������Ȼ��ƵŤת����������ȱ�ݲ����У���������������нϴ�����ߴ��ȱ�ݣ�YUEMIN��[3]�Ƶ��˵����ڹܵ��д�����������۹�ʽ��������������ģ���ʵ���о����õ����������ü�϶���㹫ʽ����ģ���ʵ���о����棬ALLEYNE��[4]��������ز����������������壬������ȱ������Ļز��źŽ��з�����ͨ���ز����ж�ȱ�ݵij̶ȣ�WANG��[5]ʹ��L(0,2)ģ̬���о���ȱ������Ͳ�ͬ�ߴ����ȱ�ݵķ����źţ�����ȷ����ȡ�ܵ�ȱ�ݳߴ磬�о�ȱ�ݶԵ����ķ�����ɣ� GALVAGNI��[6]����T(0,1)ģ̬ͨ��ģ���ʵ���о��˿��ǹܵ�֧���µĹܵ�����������������Ƶɢ���ߣ��ó�����ȱ�ݺͼ�֧�ŵķ�����YANG��[7]ģ�ⲻͬƵ��ģ̬�����ֱ�ܺ����ȱ�ݣ��ó��ܵ�ȱ�ݶ�λ�����Ƶ�ʵ����������ALLEYNE��[8]�о�ָ��ģ̬T(0,1)��ģ̬L(0,2)�������������ڳ�Һ�ܵ���˵��ģ̬L(0,2)������Ȼή�ͣ����ײ���ģ̬ת����������У�PETER��[9]�������MP �������ݣ������������ȣ����ҿ���ֱ�ӡ�ȷ���ж���������λ�á����ڽ������ó����������йܵ��������ۺ�ʵ���о������ر��[10]�Գ��������ڹܵ�����ȱ�ݼ���������ֵģ�⣬�õ��˹ܵ����������Ƴ��ȺͿ��ȶԻز��ź�Ӱ��Ĺ�ϵ����Ϊ�ٵ�[11]��������Ԫ����������Ŀǰ�ֳ������Ӧ�õ�L(0,2)��T(0,1)ģ̬�����ڹ��д������̽�����ֵģ���о���������ȱ�ݻز�����ϵ����ȱ�ݺ�������Ӱ������֮��Ĺ�ϵ���ߣ������ж�ȱ�ݵļ��γߴ磻��㿪��[12]Ӧ��ANSYS����Ԫ��������ģ�ⳬ�������Ĵ���������ȱ�ݵķ���ز��������ȷ�ض�λ��ȱ��λ�ã���˫��[13]ģ���˲�ͬģ̬��Ƶ�ʺ����ڵĵ�������ȱ�ݹܵ��еĻز��������ж��ܵ�ȱ�����˳̶ȼ�������λ�����ð���[14]�����ɹܲ���ͨ��ʵ���о��˵�����ֵ�Ͳ��������洫������ı仯������δ渻��[15]������ԳƼ������յķ�����ͨ������ʵ��Ե�������д�����������Ƶ�����Խ������о������ó�����ز���ֵ�봫�����Ĺ��������йأ��������[16]�����˲�ͬ���γߴ�ܵ��� L(0,2)�� L(0,1)������Ƶɢ�ε�����Ƶ�ʣ��ó�������С��ȱ�ݻز��ֱ����ɻ����ѵĵ��������ź����ڼ����Ƶ�ʻ�Ƶ�εĽ��ۣ��������[17]�о��˹ܵ���L(0,2)������ʼ��ֹƵ����ܵ�ֱ���ͱں�ı仯��ϵ���о�����Ϊ������Ƶ�ʷ�Χ�ڽ�һ��ѡ����ʵļ��Ƶ���ṩ�˲ο����������о������֪������Ƶɢ���Ժ��źŴ�����ֵ��Ӱ��ܵ�������Ҫ���أ�Ȼ��Ŀǰ�о���Ҫ�����ڹܵ��ߴ����Ӱ�췽�棬���Դ����������Ե�����Ƶɢ���Լ��źŴ�����ֵ��Ӱ���о����٣�Ϊ�ˣ��������߶Դ��������������о����Ա�Ϊ�ܵ�ʵ�ʼ���ṩָ����Ϊ�˲����عܵ���������ԳƵ�������Ҫ���㹻�����Ĵ������ȼ����عܵ�Բ�ܷ����ã����ǵ��糧ʵ�ʹܵ�ֱ���������������ܵ����ƣ������ڲ�ͬ����������������£�����L(0,2)ģ̬�����Թܵ����Ƽ�������ֵģ�⣬�о����������öԵ���Ƶɢ���ԡ�ģ̬ת��������ϵ����Ӱ�죬������������ϵ���ʹ���������֮��Ĺ�ϵ���ߡ�
1 ���ڹ��еĵ���
1.1 ������ģʽ��Ƶɢ����
���е�����3��ģʽ������ģʽ(Lģʽ)������ģʽ(Fģʽ)��Ťתģʽ(Tģʽ)����3��ģʽ�ĵ����ֱ���L(n,m)��F(n,m)��T(n,m)��ʾ������n��m�ֱ��������;���ģ̬�����Ҿ�Ϊ������Lģʽ��TģʽΪ��Գ�ģʽ��FģʽΪ����Գ�ģʽ��
�ɵ��Զ���ѧ�������ȵõ���������Բ�����е���������Ƶɢ���̣�ͨ����Ƶɢ�������ɵõ�����Բ���е���������Ƶɢ���ߡ����ڵ�����Ƶɢ�Ͷ�ģ̬���ԣ�ʹ�õ����Խ����ܵ���ȱ�ݶ�λ�dz����ѣ���ˣ��������Ƶɢ���ߵ��ص㣬ѡ���ض��ĵ���ģ̬������ֵģ�⡣
���ķ�����õ���L(0,2)ģ̬����ģ̬��2���������ŵ㣺���ȣ��ݲ�L(0,2)��40~200 kHz��Χ�ڼ���û��Ƶɢ���������źŲ����ڴ��������в��ᷢ�����Եı��ζ�������ʶ����Σ���ģ̬�������ٶ���죬��ˣ����ȵ���ľ���Ŀ���źţ��ܹ��������ʶ��ľ��ȡ�
1.2 ���������������
�����عܵ������IJ���ֻ����ϵ������йأ����ݲ�����Ϊ[18]

ʽ�У�cLΪL(0,2)ģ̬�����ڹ��еĴ����ٶȣ�m/s��EΪ���ϵ���ģ����Pa�� Ϊ�����ܶȣ�kg/m3��
Ϊ�����ܶȣ�kg/m3�� Ϊ���ɱȡ�
Ϊ���ɱȡ�
���ݵ����ź�ʱ��ͼ���ɵó����β���ȱ�ݻز��źŵ����ʱ����Dt����ȱ����ܶ˾���Ϊx���������¹�ϵ�� ������β��������Ծ�ȷȷ��ȱ����ܵ������˵ľ��룬���Ҹ÷�������������������ϣ��Ƚ���ϳ��IJ����Ƿ������۲������Ǻϡ�
������β��������Ծ�ȷȷ��ȱ����ܵ������˵ľ��룬���Ҹ÷�������������������ϣ��Ƚ���ϳ��IJ����Ƿ������۲������Ǻϡ�
2 ���ڹܵ��г�����������ֵģ��
2.1 ����Ԫģ�͵Ľ���
�ܵ�ģ�Ͱ�����ȱ�ݹܵ���ȱ�ݹܵ����ܵ�ģ�ͼ��β�����������l���ھ�r�ܱں�h�����ϲ�����������ģ��E�������ܶ��Ͳ��ɱ�������ȱ�ݹܵ�ģ��ʱ��ֱ�ӽ����������Ƶ���ά�ܵ�ģ�͡�Ϊ�˼����ڻ���ʱ����Ԫ�Ļ��䣬��������ǰ�Թܵ�ģ�ͽ����ʵ��и�����ģ������������ȱ�ݳߴ���������༤�������������l1������Ƕ�q���������R������W����ͼ1��ʾ��
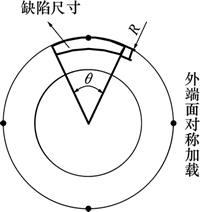
ͼ1 �ܵ�ȱ�ݳߴ����
Fig. 1 Parameters of pipe defect
����Ԫģ�Ͳ���solid45��Ԫ���͡����ݵ�Ԫ��ʱ��������㹫ʽ��ģ�͵�Ԫ����LE���ܼ���ʱ��T��ʱ�䲽��D��Ϊ����㾫�ȣ�ȱ�ݴ������С��������Ԫ����ΪLE0��ȱ�ݹܵ�ģ����ͼ2��ʾ��
ʵ�ʼ��ʱ���ܵ��а�������ұ�����ˮ�¡����������������У��߽�״�����ӣ������ڴ������İ�װ�����Ķ������о������������͵�������ϵ��֮��Ĺ�ϵ����ˣ��Թܵ�ģ�͵ı߽��������м�����ʱ���ܵ�ģ�͵����ⶼ��Ϊ��գ��Թܵ��ķǼ�������ʩ�ӹ̶�Լ����
�������ģ�ͣ�����ANSYS˲̬����ѧģ������ȫ˲̬���������г������������ֵģ�⡣
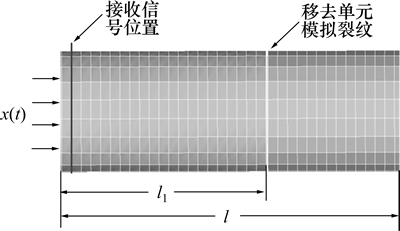
ͼ2 �ܵ�ģ��ʾ��ͼ
Fig. 2 Schematic diagram of pipe model
2.2 �������������
�ڹܵ���˲���������ģ̬����L(0,2)�����ڶ˲��Ľڵ��ϼ��ض�Ӧ��λ�����ߣ�ѡ����Ƶ��Ϊ140 kHz�������źŲ��õ��Ƶ�10���������źš����ּ����źŵ�Ƶ���������У�����Ч�ؽ��������ķ�ɢ�����Ƶ�����Ƶɢ�������źŵı���ʽΪ[13]
ʽ�У�nΪѡ�õĵ���Ƶ��Ŀ��fcΪ�ź�����Ƶ�ʣ�Hz��tΪʱ�䣬s��
ͨ���Թܵ���˵Ķ˲�������ڵ�Ԥ������˲ʱλ���غ�ģ���������䵼�������ڵ�λ�ƽ��շ��䲨�������ź�λ�þർ���źż�����1����Ԫ���ȣ���ͼ1��ͼ2��ʾ��
2.3 �ز��ź�������ȡ
���ƹܵ��Ļز��ź�ʱ��������ͼ3��ʾ�����սڵ��3���źţ������ź�x(t)�������Ʒ�������Ļز��ź� ���ӹܵ�ĩ�˷�������Ļز��ź�d(t)��
���ӹܵ�ĩ�˷�������Ļز��ź�d(t)��
�IJ���ʱ�����x(t)�IJ���ʱ���������ӣ������ֵ����������̵�ƵɢЧӦ��Ϊ�����������ź��ڴ��������е�Ƶɢ�̶Ⱥ���ȡ����ز��źţ���������2��������
1) �ز��ֱ���S��Ϊ�˲��ز��ź�d(t)��ʱ���ϵij���ʱ��T1�뼤���ź�x(t)��ʱ���ϵij���ʱ��T0֮�ȣ���S=T1/T0��SԽ��ƵɢԽ���ء�
2) ����ϵ��C��Ϊ����ز��ķ�ֵA1�����䲨�ķ�ֵA0֮�ȣ���C=A1/A0��
�����ڹܵ�ȱ�ݺͶ��洦�ᷢ�����䣬��ȱ�ݴ��ķ���ϵ������ͬ��������λ�õķ���ϵ����
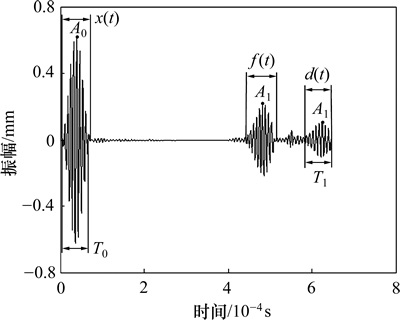
ͼ3 ȱ�ݻز�ʱ������
Fig. 3 Time history of defect echo
3 ��������
3.1 ���湤��
�ܵ��ļ��γߴ���Ҫ�Ǹ���ʵ�ʼ��ܵ��ͷ�������������������о�ģ��Ĺܵ����β���Ϊ��l=1 500 mm��r=76 mm��h=5.5 mm��ȱ�ݳߴ����Ϊ��l1=1 m��q=50�㣬R=5.5 mm��W=1 mm���ܵ��IJ���ѡ��ΪT24�֣�����ϲ���Ϊ��r=7.890 t/m3��E=2.0��1011 Pa��u=0.3��
�����ܵ�����ģ�ͼ�ȷ�������õĵ�Ԫ֮��Թܵ�ģ�ͽ������֡��ܵ���Բ�ܻ�������ʵ��ܵ������õĴ�������������[15]��������Ϊ���ش�����������1~3�������ݷ�����㾫�Ⱥͼ�������ã�ģ��Բ�ܷ����������Ϊ32������ȷ����������Ϊ2������������Ϊ19 200�������õļ������Ϊ��T= 0.68 ms��LE0=5 mm��D=0.8 ��s��
������ȱ�ݹܵ���ȱ�ݹܵ����ֱ�ԶԳƼ���4�ִ�����������2��ģ�ͽ�����ֵģ�⡣
3.2 ������ϼ�����λ
���Ƶ�����λ�Ǹ���ʽ(2)����õ���ͨ���� �����ܵ����淴�䲨�ĵ���ʱ�̼���õ�Dt=5.788 2��10-4 s��������ģ���ٶ�Ϊ5 171.2 m/s����ʽ(1)֪�����ٶ�����ֵΪ5 277.8 m/s����Ͻ���Ϻá�
���ݼ������ܵ����Ʒ��䲨�ĵ���ʱ�̲��Dt=4.06��10-4 s�������������Ϊ1.05 m������ʵ���������Ϊ1 m��ȱ�ݶ�λ���Ϊ5%���ڼ����Χ�ڡ�
3.3 ����Ƶɢ
Ƶɢ������ʱ���еı���Ϊ��ijһģ̬���İ������洫����������Ӳ������������ؽ����˼���źŵ�����ȣ�����Ӧģ̬����Ƶɢ�������أ����źŵİ�����Ҳ���ױ����Ϊ���ⲻ����ܵ�ȱ�ݶԵ���Ƶɢ��Ӱ�죬������ȱ�ݹܵ����з��棬�Խ����ź�λ�ô�����32���ڵ��λ��ʱ�����߽��м��ӣ���������������Ӱ�졣
���ò�ͬ��������������ȱ�ݹܵ����淴��ϵ����ͼ4����ͼ4��֪����������������32����С��4��ʱ���ز��ֱ���S��1.12����1.49��L(0,2)ģ̬���淴��ز������߱����ͬʱ�źŷ�ֵ����˥����죬���Ӱ�쵼���ļ����룬����ʵ��Ӧ����ɲ���Ӱ�죬��ֱ��ʡ����Ⱥͼ������С�����ԣ�Ӧ�����㹻�Ĵ����������Ƶ���Ƶɢ��
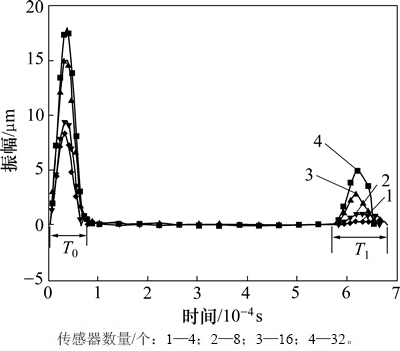
ͼ4 ��ͬ��������������ȱ�ݹܵ�����ز�ʱ������
Fig. 4 Echo time history curve of non-defective pipes end with different sensor numbers
3.4 �ܵ�ȱ��ģ̬ת��
ģ��ԳƼ��ص�4�ִ�����������ȱ�ݷ���ϵ����Ӱ���ͼ5������ͼ5��֪��������������������ʱ�������źŵķ�ֵ����ȱ�ݷ���ز�������ͬ����������L(0,2)ģ̬���Ҳ��μ�������������������Ϊ8����4��ʱȱ�ݷ���ز��л�����������ģ̬�İ����ߡ�ͨ��ȱ���뷢�����ʵ�ʾ���������ģ̬������ģ���ٶ�Ϊ3 857.9 m/s���Ա�Ƶɢ���߿�֪��ģ̬Ϊ����ģ̬F(3,3)����ֵģ������ʵ�������Ǻϡ�����Ƶɢ���߿�֪��140 kHz���ɼ��������ģ̬ΪF(13,1)�����������������ڸ�Ƶ�ʴ����������ģ̬��Ӧ����ֵ13�����ڸ�����ģ̬�������棬����������ģ̬�����Ӷ���ǿ��Գ�ģ̬������ˣ��㹻�Ĵ�������������������ǿ�����źŵķ�ֵ�����ҿ�����Ч����������ģ̬��
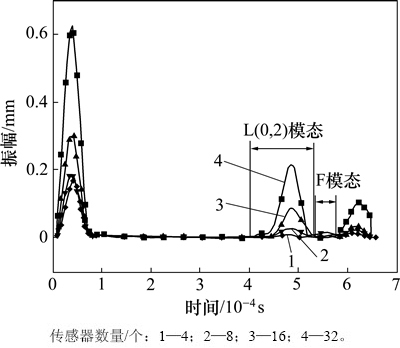
ͼ5 ��ͬ������������ȱ�ݻز�ʱ������
Fig. 5 Echo time history curves of defect with different sensor numbers
3.5 ����ȱ�ݵ�����λ
ȱ�ݵ�����λ�Ǹ��ݹܵ�����Ԫģ���ϸ��źŽ��սڵ������λ�ã������ڵ��������Ϊ�����꣬�ڵ��Ӧ�ķ���ϵ��Ϊ�����꣬����������ϵ���ļ�����ͼ��ͨ������������ϵ��ͼ�����߹켣��ȱ�ݽ�������λ��
�����������仯ʱ����ȱ�ݵ�����λ��ͼ6��ʾ�����У�ͼ6(b)��ʾ�Ǵ���������Ϊ4����8��ʱ�ķŴ�ͼ������ͼ6(b)��֪����ͬ������������ȱ�ݷ���ز��ķ�ֵ�仯���ƴ�����ͬ��ȱ��һ��ķ���ϵ�������ٶ����Ը��ڷ�ȱ��һ�෴��ϵ���������ٶȣ���ˣ�ȱ�ݵĵ�������ϵ����Բ�ܷ���ķֲ�����ҲԽ��Խ���ԣ���������������Ϊ4ʱ���Ѳ������Ե�����ȱ�ݵ�����λ�ã��ҷ���ϵ����ֵ���ͣ�����ʶ����˵�������������ı仯����ı䷴��ز��ķ�ֵ�仯���ƣ������Ŵ������������ӣ�������Ч��ǿ�źŴ�����ֵ��
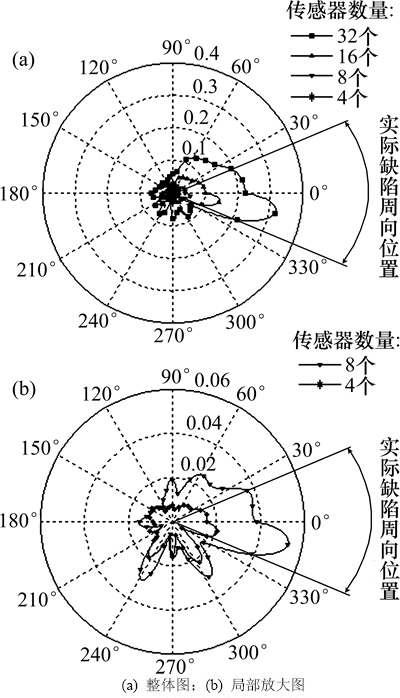
ͼ6 ��ͬ�����������ķ���ϵ��
Fig. 6 Reflection coefficients for different sensor numbers
3.6 �����������뷴��ϵ��֮��Ĺ�ϵ
ȱ�ݹܵ��ز�����ϵ������1��
��1 ʵ��ܵ��ķ���ϵ��
Table 1 Reflection coefficients of pipe

���ݱ�1����ȱ�ݹܵ�����ϵ��C�ʹ���������N�Ĺ�ϵ���ߣ���ͼ7��ʾ������ͼ7��֪��ȱ�ݹܵ��ķ���ϵ��������������ֳ����õ����Թ�ϵ����һ����ʵ�����������ֳ������Թ�ϵ���Ǻϡ�ȱ�ݹܵ�����ϵ�� C�봫��������N��������Ϲ�ϵʽΪ��C=0.010 8N-0.027 7��
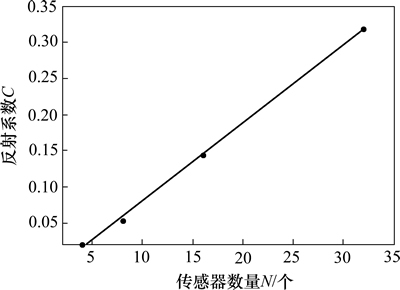
ͼ7 �����������뷴��ϵ���Ĺ�ϵ
Fig. 7 Relationship between sensor number and reflection coefficient
4 ����
1) ͨ����ȱ�ݹܵ�������-�ز��ź�ʱ�������ߣ�����L(0,2)ģ̬����ģ�Ⲩ�٣�����ģ�Ⲩ�ٽ���ȱ�ݵ�����λ���õ��䶨λ���ȣ���֤�˱���ģ�͵���ȷ�ԣ�����ģ�͵�Լ���������ļ�������������ȡ�
2) ���Ӵ����������ܹ���������ģ̬�͵���Ƶɢ���������ʶ��ľ��ȡ�
3) ���Ŵ����������ĸı䣬�����湤���е�ȱ�ݻز���ֵ�仯���ƴ�����ͬ��������������С��4��ʱ��ȱ�ݻز������ֵ���ͣ����Զ�����ȱ�ݽ�������λ��
4) ȱ�ݹܵ�����ϵ��C�봫��������N�����Ա仯��ϵ������Ϲ�ϵʽΪ��C=0.010 8N-0.027 7��
�ο����ף�
[1] FLETCHER S, LOWE M J S, RATASSEPP M, et al. Detection of axial cracks in pipes using foused guided waves[J].Journal of Nondestructive Evaluation, 2012, 31(1): 56-64.
[2] DEMMA A, CAWLEY P, LOWE M, et al. The reflection of the fundamental torsional mode from cracks and notches in pipes[J]. Dynamic Method for Damage Detection in Structures, 2008, 499(2): 195-209.
[3] YUEMIN W, LIHUA S, CHUANJUN S, et al. Theoretical and experimental research on controlling guided waves propagation direction in pipes[C]// Electronic Measurement & Instruments (ICEMI), 2011 10th International Conference. Chengdu, China, IEEE, 2011: 28-32.
[4] ALLEYNE D N, PAVLAKOVIC B, LOWE M J S, et al. Rapid, long range inspection of chemical plant pipework using guided waves[J]. Key Engineering Materials, 2001, 43(2): 180-187.
[5] WANG X, PETER W T, MECHEFSKE C K, et al. Experimental investigation of reflection in guided wave-based inspection for the characterization of pipeline defects[J]. Nondestructive Testing and Evaluation International, 2010, 43(4): 365-374.
[6] GALVAGNI A, CAWLEY P. The reflection of guided waves from simple supports in pipes[J]. The Journal of the Acoustical Society of America, 2011, 129(4): 1869-1880.
[7] YANG H, WANG C. Study on simulation of non-destructive testing for pipeline defects by ultrasonic guided waves[C]// Cross Strait Quad-Regional Radio Science and Wireless Technology Conference (CSQRWC). Harbin, China: IEEE, 2011: 238-242.
[8] ALLEYNE D N, VOGT T, CAWLEY P. The choice of torsional or longitudinal excitation in guided wave pipe inspection[J]. Insight-Non-Destructive Testing and Condition Monitoring, 2009, 51(7): 373-377.
[9] PETER W T, WANG X. Characterization of pipeline defect in guided-waves based inspection through matching pursuit with the optimized dictionary[J]. NDT & E International, 2013, 54: 171-182.
[10] ���ر�, ��־��, ������, ��. �ܵ������������Ƽ����ֵģ��[J]. Ӧ����ѧѧ��, 2005, 21(4): 76-79.
CHENG Zaibin, WANG Zhihua, ZHANG Lijun, et al. Numerical simulation of crack detection in pipes using ultrasonic longitudinal guided-wave[J]. Chinese Journal of Applied Mechanics, 2005, 21(4): 76-79.
[11] ��Ϊ��, ˧��, ����. �ܵ���ʴȱ�ݳ������������ֵģ���о�[J]. ��еǿ��, 2009, 30(6): 988-993.
DONG Weirong, SHUAI Jian, XU Kui. Numerical simulation of corrosion detection in pipes using ultrasonic guided waves[J]. Journal of Mechanical Strength, 2009, 30(6): 988-993.
[12] ��㿪, ����, ��⺣, ��. ���������ܵ�ȱ�ݼ����ֵģ��[J]. �ӱ���ҵ�Ƽ�, 2010, 27(1): 18-21.
SUN Guangkai, JIAO Yang, LI Guanghai, et al. Numerical simulation of defect detection in pipes using ultrasonic guided waves[J]. Hebei Journal of Industrial Science and Technology, 2010, 27(1): 18-21.
[13] ��˫��. �ܵ���������������ֵģ���ʵ���о�[D]. ����: ����������ѧ������ѧϵ, 2011: 24-41.
KONG Shuangqing. Numerieal simulation and experimental investigation of defect detection in pipes using ultrasonic guided waves[D]. Dalian: Dalian University of Technology. Department of Engineering Mechanics, 2011: 24-41.
[14] ���ð�, ����, ������. ��������Թ��е����������Ե�Ӱ��[J]. ������, 2004, 25(11): 553-556.
TA Dean, YI Yong, LIU Zhenqing. Influence of propagation distance on the characteristics of ultrasonic guided wave propagation in pipes[J]. NDT, 2004, 25(11): 553-556.
[15] �δ渻, ������, ֣�Z�, ��. �ܵ���������д�����������Ƶ�������о�[J]. ������ҵ��ѧѧ��, 2005, 30(4): 393-397.
HE Cunfu, LIU Zenghua, ZHENG Jingyu, et al. Study on the number and the frequency characteristic of transducers in pipe inspection using guided waves[J]. Journal of Beijing University of Technology, 2005, 30(4): 393-397.
[16] ������, ��տ��, ���ƺ�, ��. ����Բ���е���Ƶɢ��������Ƶ��ѡ��[J]. ��е����ѧ��, 2014, 50(20): 8-17.
MA Shuyi, WU Zhanjun, LIU Kehai, et al.Dispersion characteristics and inspection frequency selection of guided waves in hollow cylinders[J]. Journal of Mechanical Engineering, 2014, 50(20): 8-17.
[17] ������, ������, �괫��, ��. �ܵ�����������Ƶ��ѡ����ܲ�������ϵ[J]. ��е����ѧ��, 2009, 45(8): 243-248.
WANG Yuemin, SHEN Lihua, SHEN Chuanjun, et al. Relationship between frequency selection and pipe characteristics for guided waves NDT[J]. Journal of Mechanical Engineering, 2009, 45(8): 243-248.
[18] ��Ϊ��, ˧��, ����. �ܵ�T(0,1)ģ̬���������ֵģ���о�[J]. ������, 2008, 30(3): 149-152.
DONG Weirong, SHUAI Jian, XU Kui. Numerical simulation study of detection in pipes using T(0,1) mode ultrasonic guided waves[J]. NDT, 2008, 30(3): 149-152.
(�༭ �²ӻ�)
�ո����ڣ�2015-09-31�������ڣ�2015-11-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51175383) (Project(51175383) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�Ф���ͣ���ʿ�����ڣ��������ֻ������������������о���E-mail: xhxiao@whu.edu.cn
ժҪ���о����������öԵ����ر��ڽ����ܵ���Ƶɢ���ԡ�ģ̬ת����ȱ�ݶ�λ��Ӱ����ɡ��䲽��Ϊ�����ȣ�����ANSYS������������Сֱ������ȱ�ݹܵ���ȱ�ݹܵ�����Ԫģ�ͣ�����˲̬����ѧ�����������Թܵ��˲�������ڵ�ʩ������˲ʱλ���غɣ�ģ�ⳬ������������L(0,2)ģ̬������������-�ز��źŵ�ʱ���������ߣ�����ز��ֱ��ʡ�����ϵ������Σ�����ȱ�ݵ�����λ�þ����Լ�4�ִ��������÷����Ե���Ƶɢ��ģ̬ת��������λ�ͷ���ϵ����Ӱ�졣�о�������������Ӵ�������������Ч��������ģ̬�͵���Ƶɢ�ķ���������ǿ�ز��źŵķ�ֵ��������������С��4��ʱ�����Զ�����ȱ�ݽ�������λ������ϵ���洫�������������ӳ���������
[10] ���ر�, ��־��, ������, ��. �ܵ������������Ƽ����ֵģ��[J]. Ӧ����ѧѧ��, 2005, 21(4): 76-79.
[11] ��Ϊ��, ˧��, ����. �ܵ���ʴȱ�ݳ������������ֵģ���о�[J]. ��еǿ��, 2009, 30(6): 988-993.
[12] ��㿪, ����, ��⺣, ��. ���������ܵ�ȱ�ݼ����ֵģ��[J]. �ӱ���ҵ�Ƽ�, 2010, 27(1): 18-21.
[13] ��˫��. �ܵ���������������ֵģ���ʵ���о�[D]. ����: ����������ѧ������ѧϵ, 2011: 24-41.
[14] ���ð�, ����, ������. ��������Թ��е����������Ե�Ӱ��[J]. ������, 2004, 25(11): 553-556.
[16] ������, ��տ��, ���ƺ�, ��. ����Բ���е���Ƶɢ��������Ƶ��ѡ��[J]. ��е����ѧ��, 2014, 50(20): 8-17.
[17] ������, ������, �괫��, ��. �ܵ�����������Ƶ��ѡ����ܲ�������ϵ[J]. ��е����ѧ��, 2009, 45(8): 243-248.
[18] ��Ϊ��, ˧��, ����. �ܵ�T(0,1)ģ̬���������ֵģ���о�[J]. ������, 2008, 30(3): 149-152.
