
DOI: 10.11817/j.issn.1672-7207.2018.12.013
���Ӷ�̬����ָ������ͬ������
�¸�1, 2������1, 2��Ф��ƽ1, 2����ʤ1, 2
(1. ���Ϲ�ҵ��ѧ ��������Ϣ����ѧԺ������ ���ޣ�412007��
2. �紫������������װ������ʡ�ص�ʵ���ң����� ���ޣ�412007)
ժ Ҫ��
nov-Krasovskii���������Լ����Ծ���ʽ�������о�����ʱ��ʱ���Ӷ�̬�����ָ������ͬ���������⡣���ȣ�������������ʱ����Ϣ�Լ����������Ϣ��Lyapunov-Krasovskii���������ø��Ż��ֲ���ʽ�����������������еĻ��ֶ���������һ���µı�֤���ϵͳָ��ͬ�����ȶ����оݡ���Σ����ڴ��о���Ʊ�֤ϵͳͬ���ȶ��IJ����������������������������оݾ��и�С�����ԣ��Ҳ������������С�
�ؼ��ʣ�
Lyapunov-Krasovskii���������Ӷ�̬������ָ������ͬ��������
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2018)12-2993-09
Sampled-data exponential synchronization for complex dynamical networks
CHEN Gang1, 2, WANG Xin1, 2, XIAO Shenping1, 2, LUO Changsheng1, 2
(1. School of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, China;
2. Key Laboratory for Electric Drive Control and Intelligent of Hunan Province, Zhuzhou 412007, China)
Abstract: By using Lyapunov-Krasovskii functional method and linear matrix inequality method, the problem of sample-data exponential synchronization for complex dynamic networks with time-varying delays was studied. Firstly, the Lyapunov-Krasovskii functional with more information and the sampling interval delay information was constructed. Then, the preferable integral inequality methods were used to estimate the integral quadratic terms among derivative of Lapunov-Krasovskii functional and a new criterion was formulated to ensure the exponential synchronization of the error system. Secondly, a sampling controller was designed based on this criterion to ensure the synchronization of the system. The simulation results show that the derived synchronization criterion is less conservative and it is feasible.
Key words: Lyapunov-Krasovskii functional; complex dynamic networks; sampled-data exponential synchronization
���Ӷ�̬����(complex dynamic networks��CDNs)��ʵ����һ���ڽڵ�ļ��ϡ����и����ڵ��Ӧȷ���Ķ�̬���磬����Ե���������������֮�����ϵ����10���������Ӷ�̬�����ܵ����Ǽ����ע�������Ѿ��㷺��������ʵ��ϵͳ�绥��������ά������̬�����罻���硢����ϵͳ���硢���������[1-3]�����ڶ����綯̬��Ϊ�У�ͬ������һ�ֵ��͵ļ�����Ϊ���������ǵ��ճ������У�ͬ�������洦�ɼ����������źŻ�ģ���ź��������еĴ��䡣Ŀǰ���Ѿ��������ͬ��������ǣ��ͬ�������ͬ��������ͬ��������Ӧͬ�����ֲ�ʽͬ���ȵȡ����Ӷ�̬�����ͬ���Բ������Խ��ʹ�������Ȼ�����Ҵ���DZ�����ü�ֵ��
���ǶԸ��Ӷ�̬����ͬ���Խ����˴����о�[4-14]��������������Ϣ�����ٶȵ����ƣ�ʱ�����ɱ��⣬��ʱ�͵Ĵ���������ʹ��ϵͳ��ò��ȶ�������ˣ���ʱ��������о�������Ҫ���塣ZENG��[15-16]��ʱ������������о������ں���ʱ�͵ĸ��Ӷ�̬���磬�о����ȶ�״̬�µ��������ʱ�;�����Ҫ���塣���о����Ӷ�̬����ͬ�����������У��Ѿ�������ֿ��Ʒ�������״̬�۲�������[17]������Ӧ����[18]���������[19]��ǣ�ƿ���[20]����������[21]�ȡ����⣬��ʵ��Ӧ���У����Ʋ���Ҫ�����ַ����Լ����ֿ��ƾ��м�ʱ�ԡ�С�ͻ�����ȷ���Լ��ͳɱ������ԣ���ˣ����Ӷ�̬�����ͬ�����ƾ��кܴ���о��ռ䡣����������Ϊһ��ʵ�á����Ŀ��Ʒ���������������Dz��������ѡȡ������ͨ��Lyapunov-Krasovskii������������ñ�֤ϵͳͬ�����ȶ����оݣ��ڴ������£�����Եõ������������ͬʱ��������Ƴ���֤ϵͳͬ���IJ���������[7-8, 11-12]��ָ���ȶ�����Ϊһ���ȶ������ܹ�����ȫ��ؽ���ϵͳ�ȶ������ԡ����ڶ��ȶ����о������У�Lyapunov-Krasovskii��������������������ȸ��ӷ��㡢ֱ�ۡ�������������2�����棺1) ���������Խ��Lyapunov-Krasovskii������2) ���䵼���Ľ綨�������о������У���û���ҵ�һ�̶ֹ��ġ��ޱ����Եķ������ڴ��������£��������ݸ��˾��飬��ˣ������Lyapunov-Krasovskii�������������о���Ϊ�ˣ���������������[8]�Ļ����ϣ����ں���ʱ��ʱ�͵ĸ��Ӷ�̬���繹�����и���ʱ����Ϣ�Լ����������Ϣ������Lyapunov-Krasovskii������ֵ��ע����ǣ�����[12]�й���ĺ��в�������Ϣ�ķ����Dz������ģ����ڷ����м���(tk+1-t)�����ܺܺõر�����һ���⡣��Է����������û��ֲ���ʽ�����Ե����еĻ��ֶ���������н綨���õ���֤���ϵͳָ��ͬ���ij����������Ϊʹ��õ��о��������и�С�ı����ԣ�����ZENG��[22]�Ƶ��������ɾ�����ֲ���ʽ���������ڴ��оݣ���Ƴ���֤ϵͳָ��ͬ���IJ��������������ͨ����ֵ�����Լ�״̬�켣ͼ֤�����Ƶ����оݾ��и�С�ı����ԣ��������ÿ������ǿ��еġ�
1 ��������
�������±�ţ������ϱꡰT���͡�-1���ֱ��ʾת�þ����Լ������Rn��Rn��n�ֱ����nά������n��nά������P��0��������P�������ģ�diag{b1������bn}��ʾ��ԽǾ���0��I�ֱ��ʾ1������ά�ȵ�������Լ�����ά�ȵĵ�λ�����š��ʾ��������sym{P}��������PT+P����ǡ�*����ʾ���������еĶԳ��
���������ʱ��ʱ���Ӷ�̬���磬��ϵͳ����N����Ͻڵ㣬ÿ���ڵ㶼��1��nά��̬ϵͳ��
 (1)
(1)
���У�i = 1��2������N��xi(t)�Լ�ui(t)�ֱ��ʾ�ڵ�i״̬�����Ϳ������룻cΪ�㶨���ǿ�ȣ�A=(aij)n��n ��Rn��n��Ϊ���ӽڵ�֮��ĺ㶨�ڲ���Ͼ���G=(Gij)N��N��Ϊ�������˽ṹ���ⲿ�����̬����Gij�������£������ڽڵ�j���ڵ�i(i��j)�����ӣ���Gij��0������Gij = 0������G�еĶԽ�Ԫ�����㣺
 (2)
(2)
d(t)��ʾ��ɢʱ�ͣ�������������������
(C1)  ��
��
(C2)  ��
��
���У�d �̶ͦ�����������
����1 gΪ�����������������������������н�������

 (3)
(3)
���У�U��VΪ����ά�ȵĶ�ֵ����
���� Ϊ�������������s(t)��Rn��Ϊ��Ȼ������
Ϊ�������������s(t)��Rn��Ϊ��Ȼ������ ��״̬�켣�����ǣ����Ӷ�̬����(1)�����ϵͳ����д��������ʽ��
��״̬�켣�����ǣ����Ӷ�̬����(1)�����ϵͳ����д��������ʽ��
 (4)
(4)
����i=1��2������N�� ��
��
�������ϵͳ(4)��״̬������ʱ���0��t0��t1������tk�����ǿɲ�ģ������ڲ������tk��t��tk+1 �У�ri(tk)�Ǵ��ڵġ����ǣ���������ϵͳ(4)��������״̬������������Ƴ�Ϊ������ʽ��
 (5)
(5)
���У�KiΪ�����������������������������ױ��ֺ������ɵĿ����ź��£���������ͬ���ģ�����2��������֮�����㣺
 (6)
(6)
���У�hΪ��������������������������ﲢ��Ҫ���������������Եģ���ֻ�������������ʽ(5)����ʽ���У��������������������h��
���(5)����ϵͳ(4)�����Եõ��������ϵͳ��
 ��
��
 (7)
(7)
���У�i=1��2������N�����ǣ�ʽ(7)����д��
 ��
��
(8)
����K =diag{K1��K2������KN}��r(t)=[r1(t)��r2(t)������ rN (t)]T��g(r(t))=[ g(r1(t))��g(r2(t))������g(rN (t))]T��
�ڸ�����Ҫ����֮ǰ�������Ƚ��ܼ���������
����1[23]������������� ������d��0(d(t)����0��d(t)��d)���Լ��ɵ�����w(s)����
������d��0(d(t)����0��d(t)��d)���Լ��ɵ�����w(s)����

����

����2[12]���������жԳ���������Y�Լ��ɻ�����{w(s) | s �� [a, b]}����

����3[22]���������������Գƾ���Y��2�������ºͦ�����£�����0�����������Ρ�Rm���Լ��������N1��N2 ��Rn��m����



����4[24]�������������ά�Ⱦ���Y1��Y2��1���Գƾ���Y3��0�Լ�����h(t)��[0��h]������

���ҽ��� ��
�� ͬʱ������
ͬʱ������
����5[25]�����ں���ά�ȵľ���1����2�ͦ�3�����У���1Ϊ�Գƾ���2Ϊ�Գ�������������
���ҽ��� ����
���� ������
������
����1 �����ϵͳ(8)��ָ���ȶ��ģ����Ӷ�̬����ϵͳ(1)��ָ��ͬ���ġ�����֮������2�������ѣ�0������0����
 (9)
(9)
���� ��
��
2 ��Ҫ���
����Lyapunov-Krasovskii���������Լ����Ծ���ʽ����ʽ�Ƶ���������֤���ϵͳ(8)ָ�������ȶ��ij��������������ʽ(5)�IJ�����������Ϊ��ʹ������Ӽ�࣬������Ķ��壺
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
����1��������(C1)�£�����������d���̣����Լ������ţ������������Գƾ���P��R2n��2n��Qi ��R2n��2n(i=1, 2)��Zi ��Rn��n (i=1��2��3��4)��M1 ��R2n��2n��M2 ��R3n��3n���Գ���O ��R2n��2n��Ui ��Rn��n (i= 1��3)��X5 ��Rn��n�������Խ���Vi ��Rn��n (i= 1��2)���Լ��������S��Rn��n��U2 ��Rn��n��Ni ��Rn��n (i= 1��2)��Hi ��Rn��n (i= 1��2������N)��Fi ��Rn��n (i= 1��2������N)��Ki ��Rn��n (i= 1��2������N)��Xi ��Rn��n (i=1��2��3��4)��H=diag{H1��H2������H n}��F=diag{F1��F2������Fn}��K=diag{K1��K2������Kn}������

 (10)
(10)

 (11)
(11)
 (12)
(12)
����






 ��
��

 ��
��
 ��
�� ��
�� ��
��
 ��
�� ��
�� ��
��
 ��
�� ��
��  ��
��
 ��
�� ��
��
 ��
�� ��
��
 ��
�� ��
��
 ��
�� ��
��
 ��
�� ��
��
 ��
��
 ��
��
 ��
��
 ��
��
�����ϵͳ(8)��ָ���ȶ��ģ���˥����Ϊ�������⣬ϵͳ(8)�еĿ��п�������������ΪK=F-1H��
֤����������������㷺����
 (13)
(13)
����
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
ͨ����V(t)�ĸ��������Եõ�һϵ�о����Լ�����ʽ����Ҫ������Ծ���ʽ��������ؼ����ڶԵ����л��ֽ��д��������潫�ֱ���ܶԲ�ͬ������Ĵ���������
��V4(t)��V5(t)�������������2�����ֶ����ͣ�

 (14)
(14)
���� ��
�� �Ķ��������1��
�Ķ��������1��
ͬ������V6(t)��V7(t)����������2�ֻ��ֶ����ͣ�


 (15)
(15)
��V8(t)����������Ķ����͡����ݻ�������ʽԭ��������������Գ���O��R2n��2nʱ�������治��ʽ������

 (16)
(16)
��V7(t)����ͬ���ķ�����������һ����V10(t)�����к��в�����Ϣ�Ļ�������й��ƣ��������������N1��N2ʱ����



 (17)
(17)
��������(6)��ʽ(17)����д��
(18)
��һ���棬���ڳ����ţ�0������1�е�����(3)д��������ʽ��
 (19)
(19)
����ϵͳ(8)�ĵ�ʽ��������������2������ά�ȵľ���F��K��������������ʽ������

 (20)
(20)
��(19)��(20)���뷺��V(t)�ĵ����У�����(14)��(15)��(16)��(18)Ӧ����V(t)�ĵ������ƣ����ǣ���tk��t��tk+1ʱ��V(t)�ĵ�������д��

 (21)
(21)
��������4�Լ�����5����ʽ(10)��(11)�������� ��������t��[tk��tk+1)�����Լ�V8(tk+1)��V9(tk+1)��V11(tk+1)��������0����V(t)��0������������[22]�е����������ڳ��С���������ĺͦң���
��������t��[tk��tk+1)�����Լ�V8(tk+1)��V9(tk+1)��V11(tk+1)��������0����V(t)��0������������[22]�е����������ڳ��С���������ĺͦң���
 (22)
(22)
��ˣ����ϵͳ(8)��ָ���ȶ��ģ���˥����Ϊ�������ݶ���1��ϵͳ(1)��ָ��ͬ���ģ���ָ��ͬ����Ϊ����֤��������
ע��1�����������[8]�з��������Ĺ���1���µ�����Lyapunov-Krasovskii��������������V8��V9�������˸���IJ�����Ϣ��ʹ�������оݾ��и�С�ı����ԡ�
ע��2������=0(��������������0)������(10)��(11)�Լ�(12)���У���ϵͳ(8)ӵ���㹻С˥���ʵ�ָ��ͬ�����Ҿ�ϵͳ(8)�еĿ��п�������������K=F-1H��
����2��������(C2)�£�����������d���̣����Լ������ţ������������Գƾ��� ��R3n��3n��Qi��R2n��2n(i=1��2)��Zi��Rn��n(i= 1��2��3��4)��M1��R2n��2n��
��R3n��3n��Qi��R2n��2n(i=1��2)��Zi��Rn��n(i= 1��2��3��4)��M1��R2n��2n�� ��R4n��4n���Գ���O��R2n��2n��Ui��Rn��n(i= 1��3)��X5��Rn��n�������Խ���Vi��Rn��n(i=1��2)���Լ��������S��Rn��n��U2��Rn��n��Ni��Rn��n(i=1��2)��Hi��Rn��n(i=1��2������N)��Fi��Rn��n(i=1��2������N)��Ki��Rn��n(i=1��2������N)��Xi��Rn��n(i=1��2��3��4)��H=diag{H1��H2������Hn}��F=diag{F1��F2������Fn}��K=diag{K1��K2������Kn}������
��R4n��4n���Գ���O��R2n��2n��Ui��Rn��n(i= 1��3)��X5��Rn��n�������Խ���Vi��Rn��n(i=1��2)���Լ��������S��Rn��n��U2��Rn��n��Ni��Rn��n(i=1��2)��Hi��Rn��n(i=1��2������N)��Fi��Rn��n(i=1��2������N)��Ki��Rn��n(i=1��2������N)��Xi��Rn��n(i=1��2��3��4)��H=diag{H1��H2������Hn}��F=diag{F1��F2������Fn}��K=diag{K1��K2������Kn}������
��
 ��
�� ��
��
 ��
�� ��
��
��
 ��
��
����
 ��
��
 ��
��



 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
 ��
��
�����ϵͳ(8)��ָ���ȶ��ģ���˥����Ϊ�����Ҿ�ϵͳ(8)�еĿ��п�����������K=F-1H��
֤�����������㷺��

����V(t)��V1(t)��V9(t)���������1����
 ��
��
 ��
��
 ��
��
 ��
��
�������Ϲ����ķ�����������Lyapunov- Krasovskii��������(�붨��1ͬ��)�������Ƶ�������2�Ľ��ۡ�
ע��3�����ڴ�������(C2)�����Խ� �����Ƕ�
�����Ƕ� ��һ�κ�������
��һ�κ������� ��
�� ͬʱ����ʱ��
ͬʱ����ʱ�� ��
��
ע��4������=0(Ҳ���Ǧ�����������0)������2���У���ϵͳ(8)ӵ���㹻С˥���ʵ�ָ��ͬ�����Ҿ�ϵͳ(8)�еĿ��п�������������K=F-1H��
ע��5���Ա�(C1)��(C2)��2�������µĸ��Ӷ�̬����ָ��ͬ����������Ȼ����(C2)���и����ʱ����Ϣ��������ֵ���������������(C2)���������õ�ָ��ͬ���������и�С�ı����ԡ�
3 ����ʵ��
��1���������ϵͳ(8)��������Ͼ���������Ͼ���ֱ�Ϊ
 ��
��
����d=0.25����=0.5��������Ժ���fΪ

����Ȼ���˺�����������(3)����
 ��
��
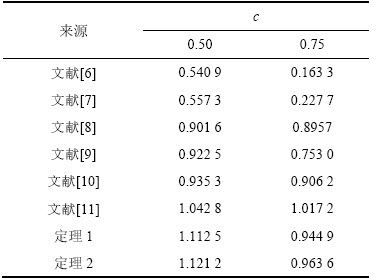
���ö���1�붨��2�еij���оݣ��� matlab�������м��㣬���Եõ��ڲ�ͬ����c�µ����������h�������������1���ӱ�1���Կ�����������[6-10]�н����ȣ����������������������������������[11]�У���c=0.75ʱ����������h���ڱ��Ľ������c=0.5ʱ���������ò������h��߷dz�������ͬʱ������2�붨��1��ȣ�����hҲ��ߣ���˵�����ǿ��c�Լ�ʱ�͵������������������������Ļ�ö���һ��Ӱ�죬ͬʱ˵�����������оݾ���һ����Խ�ԡ�
��1 ����1�в�ͬc�µ��������h
Table 1 The maximum allowed h for different c in Theorem 1
�����÷���ͼ���������÷�������Ч�ԡ����ö���1����c=0.75��h=0.944 9����=0.5��d(t)=0.125+0.125 sin (4t)ʱ������Matlab�е�SeDuMi��������Լ���õ�����������Ϊ��
������״̬�����������Ļ����ϣ�����ʼ״̬
 ��
�� ��
��
 ��
��
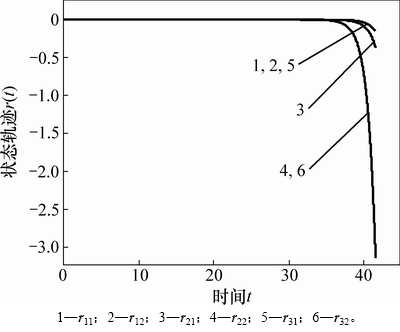
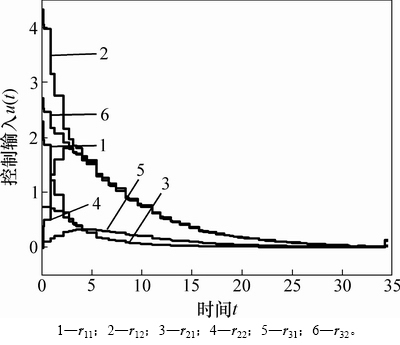
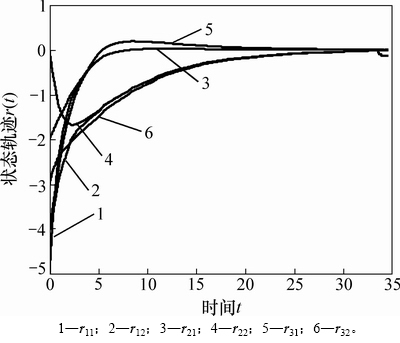
ʱ���ڸÿ������£������������ϵͳ(8)��״̬�켣��ͼ1�����ϵͳ(8)�Ŀ�������켣��״̬�켣�ֱ��ͼ2��ͼ3����ͼ1~3���Կ���������������ʱ��ϵͳ�Ƿ�ɢ�ģ�����ϵͳ���ӱ����Ƶ����������������ʱ��״̬�켣��������ƽ��㡣��֤���˱��ķ����Ƶ������ֿ������ǿ��еġ�
�ڶ���2�����о��£���c=0.5��h=1.121 2����=0��d(t)=0.15+0.01cos(5t)ʱ������������Ϊ��
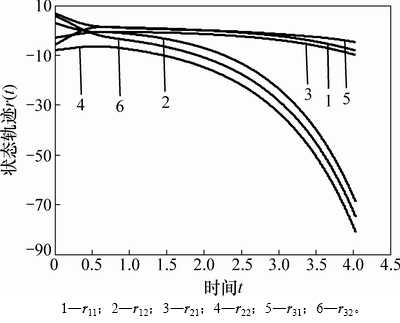
ͼ1 ����1�������������ϵͳ(8)��״̬�켣
Fig. 1 State trajectories of error system(8) without control input in Theorem 1
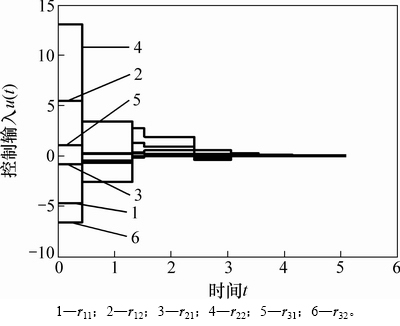
ͼ2 ����1�п�������u(t)
Fig. 2 Control input u(t) in Theorem 1
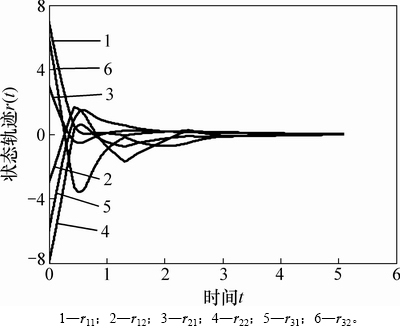
ͼ3 ����1�����ϵͳ(8)��״̬�켣
Fig. 3 State trajectories of error system (8) for Theorem 1
��ʼ״̬Ϊ��
 ��
�� ��
��
 ��
��
�ڸÿ������Լ���ʼ״̬�£��������µ�״̬�켣��ͼ4����������켣��ͼ5�����ϵͳ(8)��״̬�켣��ͼ6��ͬ������֮ǰ�Ľ�����ͬ�����ڷ�ɢϵͳ����������ǰ�����Ƶ������ֲ���������ʱ��ϵͳ�켣�Լ�����켣��������ƽ��㡣��˵���ÿ������ǿ��еġ�
ͼ4 ����2�������������ϵͳ(8)��״̬�켣
Fig. 4 State responses of error system (8) without control input in Theorem 2
ͼ5 ����2�п�������u(t)
Fig. 5 Cntrol input u(t) in Theorem 2
ͼ6 ����2�����ϵͳ(8)��״̬��Ӧ
Fig. 6 State responses of error system (8) in Theorem 2
4 ����
1) �Ժ�����ɢʱ�͵ĸ��Ӷ�̬��������о����������ڲ��������µ�ָ��ͬ�����⣬�����õ���֤����ָ��ͬ���ij�������������Ҹ����˲�����������Ʒ�����
2) ���ڼ����ȶ������������Ե�Ŀ�ģ��ڷ��������Ӳ�����Ϣ���Լ����ø��Ż��ֲ���ʽ���Ʒ��������еĻ��ֶ�������ֵ�Աȣ������ö��������£����Ի�ø�������������ʾ���ĵķ�������Ч�ģ�����ϵͳ�켣ͼ��ʾ���ò����������ܹ�ʵ��ϵͳ���ȶ��ԣ�֤���˿�������Ʒ������С�
�ο����ף�
[1] ����, �ް�. һ�������ϵͳ³�����Ƽ�Ӧ��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2003, 34(2): 188-191.
ZHANG Min, LUO An. Robust control for a class of nonlinear systems and its application[J]. Journal of Central South University (Science and Technology), 2003, 34(2): 188-191.
[2] YU Jianjiang, ZHANG Kanjian, FEI Shumin. Improved results on passivity analysis of discrete-time stochastic neural networks with time-varying delay[J]. Journal of Central South University(Science and Technology), 2009, 40(Z1): 63-67.
[3] BOCCALETTI S, LATORA V, MORENO Y, et al. Complex networks: structure and dynamics[J]. Physics Reports, 2006, 424(4/5): 175-308.
[4] LI Kun, GUAN Shuguang, GONG Xiaofeng, et al. Synchronization stability of general complex dynamical networks with time-varying delays[J]. Physics Letters A, 2008, 372(48): 7133-7139.
[5] LI Hongjie, YUE Dong. Synchronization stability of general complex dynamical networks with time-varying delays:a piecewise analysis method[J]. Journal of Computational & Applied Mathematics, 2009, 232(2): 149-158.
[6] LI Nan, ZHANG Yulian, HU Jianwen, et al. Synchronization for general complex dynamical networks with sampled-data[J]. Neurocomputing, 2011, 74(5): 805-811.
[7] WU Zhengguang, PARK J H, SU Hongye, et al. Exponential synchronization for complex dynamical networks with sampled-data[J]. Journal of the Franklin Institute, 2012, 349(9): 2735-2749.
[8] WU Zhengguang, SHI Peng, SU Hongye, et al. Sampled-data exponential synchronization of complex dynamical networks with time-varying coupling delay[J]. IEEE Transactions on Neural Networks & Learning Systems, 2013, 24(8): 1177-1187.
[9] WANG Junyi, ZHANG Huanguang, WANG Zhanshan. Sampled-data synchronization for complex networks based on discontinuous LKF and mixed convex combination[J]. Journal of the Franklin Institute, 2015, 352(11): 4741-4757.
[10] SU Lei, SHEN Hao. Mixed H��/passive synchronization for complex dynamical networks with sampled-data control[J]. Applied Mathematics & Computation, 2015, 259: 931-942.
[11] LIU Yajuan, GUO Baozhu, PARK J H, et al. Nonfragile exponential synchronization of delayed complex dynamical networks with memory sampled-data control[J]. IEEE Transactions on Neural Networks & Learning Systems, 2016, 29(1): 118-128.
[12] LIU Yajuan, LEE S M. Improved results on sampled-data synchronization of complex dynamical networks with time-varying coupling delay[J]. Nonlinear Dynamics, 2015, 81(1/2): 931-938.
[13] WANG Jianan. New synchronization stability criteria for general complex dynamical networks with interval time-varying delays[J]. Neural Computing & Applications, 2017, 28(4): 805-815.
[14] WANG Jianan, ZENG Chan, WEN Xinyu. Synchronization stability and control for neutral complex dynamical network with interval time-varying coupling delay[J]. Circuits Systems & Signal Processing, 2017, 36(2): 559-576.
[15] ZENG Hongbing, HE Yong, WU Min, et al. Free-matrix-based integral inequality for stability analysis of systems with time-varying delay[J]. IEEE Transactions on Automatic Control, 2015, 60(10): 2768-2772.
[16] ZENG Hongbing, HE Yong, WU Min, et al. New results on stability analysis for systems with discrete distributed delay[J]. Automatica, 2015, 60(C): 189-192.
[17] JIANG Guoping, TANG W K, CHEN Guanrong. A state-observer-based approach for synchronization in complex dynamical networks[J]. IEEE Transactions on Circuits & Systems, 2006, 53(12): 2739-2745.
[18] LI Xiaojian, YANG Guanghong. Adaptive fault-tolerant synchronization control of a class of complex dynamical networks with general input distribution matrices and actuator faults[J]. IEEE Transactions on Neural Networks & Learning Systems, 2017, 28(3): 559-569.
[19] YANG Xinsong, CAO Jinde, LU Jianquan. Stochastic synchronization of complex networks with nonidentical nodes via hybrid adaptive and impulsive control[J]. IEEE Transactions on Circuits & Systems, 2012, 59(2): 371-384.
[20] WANG Jinliang, WU Huaining, HUANG Tingwen, et al. Pinning control for synchronization of coupled reaction-diffusion neural networks with directed topologies[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2015, 46(8): 1109-1120.
[21] WU Zengguang, SHI Peng, SU Hongye, et al. Exponential synchronization of neural networks with discrete and distributed delays under time-varying sampling[J]. IEEE Transactions on Neural Networks & Learning Systems, 2012, 23(9): 1368-1376.
[22] ZENG Hongbing, TEO K L, HE Yong, et al. Sampled-data synchronization control for chaotic neural networks subject to actuator saturation[J]. Neurocomputing, 2017, 260: 25-31.
[23] PARK P G, KO J W, JEONG C. Reciprocally convex approach to stability of systems with time-varying delays[J]. Automatica, 2011, 47(1): 235-238.
[24] ZHANG Yijun, YUE Dong, TIAN Engang. New stability criteria of neural networks with interval time-varying delay: a piecewise delay method[J]. Applied Mathematics and Computation, 2009, 208(1): 249-259.
[25] RAKKIYAPPAN R, LATHA V P, ZHU Quanxin, et al. Exponential synchronization of Markovian jumping chaotic neural networks with sampled-data and saturating actuators[J]. Nonlinear Analysis Hybrid Systems, 2017, 24: 28-44.
(�༭ �²ӻ�)
�ո����ڣ�2018-01-10�������ڣ�2018-03-15
������Ŀ(Foundation item)������ʡ��Ȼ��ѧ����������Ŀ(2018JJ4075)��������Ȼ��ѧ����������Ŀ(6167225, 61304064)(Project(2018JJ4075) supported by the Natural Science Foundation of Hunan Province; Projects(6167225, 61304064) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��¸գ���ʿ�������ڣ�����ʱ��ϵͳ��³�������о���E-mail��drchengang@163.com
ժҪ������Lyapunov-Krasovskii���������Լ����Ծ���ʽ�������о�����ʱ��ʱ���Ӷ�̬�����ָ������ͬ���������⡣���ȣ�������������ʱ����Ϣ�Լ����������Ϣ��Lyapunov-Krasovskii���������ø��Ż��ֲ���ʽ�����������������еĻ��ֶ���������һ���µı�֤���ϵͳָ��ͬ�����ȶ����оݡ���Σ����ڴ��о���Ʊ�֤ϵͳͬ���ȶ��IJ����������������������������оݾ��и�С�����ԣ��Ҳ������������С�
