
���绯���ƶ�Ŀ�����Ż��Ľ����㷨
���ɣ������գ�������������
(����ʦ����ѧ ��ѧԺ������ ��ɳ��410081)
ժ Ҫ��
���Ż�ϵͳ�нڵ�Ϊʱ�������Ĵ���ģʽ�����һ�ֶ�Ŀ���Ż��ĸĽ������㷨�����ȣ��������绯����ϵͳ�нڵ��ʱ���������¼�����2�ִ���ģʽ��������ʱ������ģʽ�����ݶ������������绯���ƶ�Ŀ�����Ż�ϵͳ����ѧģ�ͣ���������ȥ�ߣ����ִ�����������Σ�����һ�ֻ���˫Ⱥ���������ƵĸĽ���ֽ����㷨��ͨ����Լ�������Ŀ��кͲ�����˫Ⱥ�崦���������Ŀ���Ż�����������ֲ����ŵ����⣬���Ľ�����ͽ������������Ż��ٶ������ܡ��������IEEE 30�ڵ�ϵͳ���з�����㼰�������о�������������㷨�����ܱ�֤ϵͳ�ﵽ����״̬�����������ٶȡ������Լ��ƽ��Եȷ�����нϴ���ߡ�
�ؼ��ʣ�
���绯��������Ŀ�����Ż�����ֽ����㷨�����ݶ�����ʱ��������ȥ��-���ִ�����
��ͼ����ţ�TM714.3��TM761.1 ���ױ�־�룺A ���±�ţ�1672-7207(2012)08-3073-07
Evolutionary algorithm for network-controlled multi-objective reactive power optimization
PENG Ke, PAN Qing-lin, LI Zhong-yang, LAN Hao
(College of Engineering, Hunan Normal University, Changsha 410081, China)
Abstract: In view of the time-driving transmission mode of nodes in the network-controlled reactive power optimization (RPO) system, an improved multi-objective evolutionary algorithm was proposed. Firstly, the time-driving and event-driving transmission modes of nodes in the network control system (NCS) were analyzed. To deal with the data packet dropout of the time-driving mode, the model of the network-controlled multi-objective RPO system was established. The redundancy-removal and maintaining process was introduced. Secondly, a differential evolutionary (DE) algorithm based on double populations searching scheme was presented. It solved the local optimization problem of the multi-objective optimization. The constraints were processed to the feasible and infeasible solutions populations. The mutation and crossover operations were also modified to improve the speed and performance of optimal searching. Finally, the simulations and analysis were made on IEEE 30-bus system. The results show that the proposed algorithm can make the system to achieve its approximate optimal state. The convergence rate, uniformity and approximation are also greatly much improved.
Key words: networked control; multi-objective reactive power optimization; differential evolutionary algorithm; data packet dropout; time driving; redundancy-removal and maintaining process
���绯�������Ż�ϵͳ�ǽ����绯���Ƽ�������������Ż����γɵ�ʵʱ����ϵͳ�����Ż�(Reactive power optimization, RPO)�ǵ���ϵͳ��һ����������[1]���������绯���ƺ��ܹ�������������Ż��Ŀ������ڣ���֤��������ʵʱ�Ż����ڣ��Ӷ�ʵ�ֵ���ϵͳ�ľ��úͰ�ȫ���С���ǰ���о��У�����̽���˻������绯����ģ�ͺ��Ŵ��㷨��ϵĵ�Ŀ�����Ż����Ʒ�������ȡ����һ���о����[2]��һЩ�о���Ҳ��������绯����Ӧ���ڵ���ϵͳʵʱ���[3]�������������о��������Ż��㷨�����ܶԱȼ��Ľ�����[4-5]�����ǣ�ͬʱ������绯���ƴ���ģʽ�Ͷ�Ŀ���Ż��㷨�Ľ����о����١����绯��������ͨ�����紫���ʵʱ����״̬�����������Ż����ڣ���������ͽ�����紫��ģʽ�������ʱ�ͻ���Ӱ�죻����Ŀ���Ż��Ƕ��ڶ�����Լ����ָ����ۺ�Ѱ�ţ��б�Ҫ̽�ֲ��е�ȫ�����������Ա��ܽϿ�õ����Ž⡣��ֽ����㷨(Differential evolution, DE)��һ����ʽ�Ż��㷨������ԭ�����ܿز����١����Ż��������Բ����е��ŵ㡣Ϊ�ˣ����������о�һ�����绯���ƶ�Ŀ�����Ż��ĸĽ������㷨������Ҫ���ڸĽ�DE�㷨������˫Ⱥ���������ƽ���Ѱ�ţ�ʹ���㷨����Ч��Ӧ�Դ�Լ�������Ķ�Ŀ�����Ż�[6-7]��ͬʱ��������绯������ʱ���������ݴ���ģʽ���Ż��㷨��Ӱ�죬����ȥ��-���ִ����Խ�����綪������[2]�����IEEE30ϵͳ���з���ʵ�飬��֤���㷨�Ŀ����Ժ���Ч�ԡ�
1 ���绯���ƶ�Ŀ�����Ż��� ��ģ
1.1 ���绯�������Ż��нڵ�����ݴ���ģʽ
���绯�������Ż���������һ�����绯����ϵͳ(Networked control system, NCS)�����ݶ����DZ����������⡣��������ӵ���������жϵȳ����Ķ���ԭ���⣬�ڵ�����ݴ���ģʽҲ��������ݶ����������绯����ϵͳ�У��ڵ����ݵĻ�������ģʽͨ����2�֣�ʱ���������¼�������ʱ�����������ݴ���ģʽ�ǣ���ϵͳʱ�������£��������ڵ㶨ʱ�Ӵ������ڵ����״̬��Ϣ���ڿ������˽��м��㴦����ͬʱ��ִ�����ڵ�Ҳ�ӿ������ڵ���տ���ָ������Ӧ������������¼����������ݴ���ģʽΪ���������ڵ��ִ�����ڵ�ֻ���ڷֱ���յ���Ӧ��״̬��Ϣ�����ָ��Ž�����һ�����ݼ������������2�ֽڵ㴫��ģʽ��ʱ���������ֱ���ͼ1��ͼ2 ��ʾ��
��ͼ1��ͼ2���Կ����������¼�������ʽ��������ʱ�����սڵ�ֻ���յ����ͽڵ��״̬���ݻ����ָ��Ż������Ӧ�Ŀ��Ƽ��������������������ƹ��̵�ʱ�������ɽ��������¼����������������������������ʱ����в�ȷ���ԣ��ϸ���˵Ϊ�������Կ��ơ�������ʱ��������ʽ����ʱ��ֻҪ����Ԥ�����ڣ��������ڵ�ͻ��Զ��������������ڵ��Զ����㣬ִ�����ڵ��Զ�������Ʋ���������ƹ���Ϊ�����Կ��ơ��ھ���ȫ��ʱ�ӵ�����£����绯�������Ż�ϵͳһ��Ӧ����ʱ����������ģʽ���Ա�֤���Ż��������ܵ��ȶ���������Ҫ̽��ʱ��������ʽ�µĶ�Ŀ�����Ż���

ͼ1 ���绯�������Ż��нڵ��ʱ����������
Fig.1 Time-driving transmission chart of nodes in network-controlled RPO

ͼ2 ���绯�������Ż��нڵ���¼���������
Fig.2 Event-driving transmission chart of nodes in network-controlled RPO
��ʱ����������ģʽ�У����սڵ��ڹ̶������ڱ�ȻҪ����1��״̬��������ݡ������1��������2����������ͬʱ������սڵ�ͻ�ѡȡʱ�̽Ͻ������ݣ��Ӷ�������ݶ�������һ���棬�����1��������û�����ݴ����������ô����Ӧ�ڵ�ͻᱣ��ǰһʱ�̵���ʷֵ����ɿղ�������2���������������ݶ���������ͼ1�У����ڵ�k+2ʱ�̵Ŀ������ڵ�͵�k+1ʱ�̵�ִ�����ڵ㣬��Ϊ��������Ϣxk��xk+1ͬʱ����������������ź�uk-1��ukͬʱ����ִ�����ڵ㣬���սڵ�ѡȡ�Ͻ�xk+1��uk����ô����������Ϣxk�Ϳ����ź�uk-1�����˶���������k+1ʱ�̵Ŀ������ڵ�͵�kʱ�̵�ִ�����ڵ���Ϊû�������ݵ����Ӧ�ڵ�ͻᱣ��ǰһʱ�̵���ʷֵxk-1��uk-2�����³��ֿղ�������
1.2 ���绯�������Ż�ϵͳ�Ķ�Ŀ���Ż�ģ��
���绯���ƶ�Ŀ�����Ż��ǣ����Ż�ϵͳ�������绯����ģʽ����ѡȡ2����2�����Ϻ�����Ϊ�Ż�Ŀ��[8-10]��������ѡȡ�й�������С����ѹ�ȶ������(��ѹ�½���С)Ϊ������ͬ��ΪĿ�꺯����������ϵͳ���Ż�ģ�����£�
min FL, FV (1)
ʽ�У�FLΪϵͳ���й�����FVΪ��ѹ�½�ƫ��������ʽԼ��Ϊ����ƽ��Լ���������ڵ��й�������ƽ�ⷽ�̣�����ʽԼ���������������������������ر�ѹ����λ���������ѹ�ȿ��Ʊ���Լ��(��u��ʾ)���Լ�����������ʡ�PQ�ڵ��ѹ��״̬����Լ��(��x��ʾ)�Լ����紫��ʱ��Լ��(��scΪ�������ڵ㵽�������ڵ�Ĵ����ӳٱ�������caΪ�������ڵ㵽ִ�����ڵ�Ĵ����ӳٱ�������sc max�ͦ�ca max����sc min�ͦ�ca min�ֱ�Ϊ���ϡ�����)�������紫��ʱ�Ӧ�sc����sc max���ca����ca max�����������ݶ���[2-3]��
2 ʱ�����������ݶ����Ĵ������㷨�Ľ�
2.1 ʱ������ģʽ�µ����ݶ���������
����������ʱ������ģʽ�����ݶ�����2����ʽΪ���ݶ����Ϳղ������ڵ����ڿ��Ƶķ�ʽ�£����߾�����Ϊ�ӣ�T (���У�TΪϵͳ�и����нڵ����ƽڵ�Ŀ������ڣ���Ϊ����ʱ��)�������绯�������Ż�ϵͳ�У����ݶ��������Ż��㷨��Ӱ��� ��[11-13]�����ϵͳ�����ݶ��������(����ǰ��ͨ���뷴����·)��������á�ȥ��-���֡��������������[2]����νȥ��-������ָ���ڿ����������Ż�����ʱ��ȥ����Щû�б�Ҫ����Ѱ�ŵ����IJ��ɲ�״̬���ɿصĿ��������Դﵽ��Ѱ�ż���Ŀ�ģ�����ִ�����ˣ����ֲ��ɿ����������ʷֵ���Ա�֤���绯�������Ż�ϵͳ�ܹ��õ����Ž⣬���������ݶ������Ż���������Ӱ�졣
����ʵ�ַ����ǣ��ڿ���������������״̬�Խ���S�����ڴ��ϵͳ�п�����u��״̬��x�����紫��״̬����S�У�ֵΪ��0����ʾ��Ӧ�Ŀ������ݲ��ɿػ�״̬���ݲ��ɲ�(������������ݶ������)��ֵΪ��1�����ʾ�ÿ������ɿػ�״̬���ɲ⣻ͨ����ǰ������ͨѶ״̬���Զ�����S�п�������״̬���Ķ�Ӧֵ�������Ż������������У�����Ӧ�����Ʊ���u��״̬����x��ͬ���ɹ���״̬����x�䣬��������x����Խ���S��ˣ��Ӷ�����Ӧ�IJ��ɲ����xbc�Ͳ��ɿط���ubk���������Ż����㣻Ȼ���ɿط���ukk�����������µ��Ż�ֵ����xbc��ubk���ֵ�ǰһ����ʷֵ����ɲ����xkc�Ϳɿط���ukkһ������Ż�Ŀ�꺯����Լ����������֤�����տ�����ʵ�������u������֤�������ſɿط���ukk�벻�ɿط���ubk��ʷֵ����ͬ���ɡ��÷����ļ��㲽�����¡�
(1) ���ɹ���״̬������
x��=[x u] (2)
����״̬����x���ά��Ϊ1��m����m=p+n�����У�pΪϵͳ״̬����������nΪ���Ʊ���������
(2) ��������״̬�Խ���S��
![]() (3)
(3)
���У�![]() ��ָ��״̬���������λ������״̬�Խ���S�е�λ�á�
��ָ��״̬���������λ������״̬�Խ���S�е�λ�á�
(3) ȥ�߲�����
![]() (4)
(4)
ʽ(4)�У�ͨ������״̬�Խ���S�������ɿ�������Ͳ��ɲ�״̬���ӹ���״̬����x������Ϊ���������㻯�������Ա����ɿ�������Ϳɲ�״̬������Բ�ͬ���Ż��㷨��ȥ�߲����Ĺ��㻯���ܽ�����Ϊ����˷����㣻���ڷ����Ա任���Ż�������ȥ�߲��������ݾ����������ͬ��
(4) �Ż��������㡣
�����ڹ���״̬����x���пɿط���ukk���ɲ����xkc���е���Ѱ�ż��㣬���ɿط���ubk�Ͳ��ɲ����xbc�������Ѱ�ŵ���������ԭ�е��Ż�������������ukk(k-1)������������õ��µ��Ż�ֵukk(k)��
(5) ���ֲ�����
![]() (5)
(5)
![]() (6)
(6)
ʽ�У�IΪ��λ�Խ��Ӷ������ɿط���ubk�Ͳ��ɲ����xbc����Ϊǰһʱ����ʷֵ����ͨ��ʽ(6)�����Ż����������Ŀɿط���ukk(k)��ͬ�γɿ����������տ�����u(k)����Ӧ�ѹ���״̬����x��(k)����ʽ(1)����Ŀ�꺯����Լ����������֤���㡣
2.2 �������ݶ����Ķ�Ŀ�����Ż��Ľ�DE�㷨
��ʽ(1)��֪�����绯���ƶ�Ŀ�����Ż���ʵ����һ���Լ�������Ķ�Ŀ���Ż����⡣ͨ���������(Ҳ�����̶�)�����ܹ�����ʽԼ��ת��Ϊ����ʽԼ����������ɲ�������[6]��[7]�еĸĽ�DE�㷨���Խ��������˼·���¡�
���ڴ�Լ���Ż���������Ž����λ�ڿ�����Ͳ�������ı߽��ϻ����������������в����н����ڿ������дֿ��н⣬Ϊ�����ȫ��Ѱ���ٶȺ����ܣ����ۺϿ��Ƕ�Ŀ�꺯����Լ����������ˣ�Ӧ�ȸ���Լ��������ѡ���ʼ��Ⱥ���ٰ��ս�Ŀ����Խ������Ϊ���кͲ�������Ⱥ�����Բ�ͬ�����ֱ����2����Ⱥ��ѡȡ����������б���ͽ��棻���ţ������¸���Ŀ������ж����������Ƿֱ��ţ������Pareto����������ɶ��¸����ѡ�����[14]��������һ��������壬�Ӷ�ȷ���µĿ��кͲ�������Ⱥ��ͬʱ�����㷨����Գ�ʼ��Ⱥ���Logistic ӳ���������ʼ�������ڱ�������������ſ��н�gbest����������F��ģ���˻���ԣ����ۺϿ��ǿ����벻���н⼯���������ܣ��ԸĽ�����������̣��ڽ�������У���������CRҲ����ģ���˻���������ߺ��ھֲ�Ѱ�����������¿�����Ⱥ��ѡ���������Ŀ�꺯����Pareto���ţ������²�������Ⱥ��ѡ�������������Լ��������Pareto���š�
�øĽ�DE�㷨�ľ���ʵ�ֲ������¡�
(1) ��ʼ��������ȡȫ����Ⱥ��ģΪN����N=N1+N2(N1Ϊ������Ⱥ��ģ��N2Ϊ��������Ⱥ��ģ)������Logistic ӳ������ʼ��ÿһ������xi���ж�������ԣ��ֱ���������Ⱥ�Ͳ�������Ⱥ�д��ã���ͳ�Ƴ����и�����ĿNF�Ͳ����и�����ĿNI��
(2) �����������˫Ⱥ����������У�Ϊ�˱���Ⱥ��Ķ����Ժ������ԣ�����������������Ŀ���Ⱥ��Ͳ�����Ⱥ�壬ȡ�����������Ϊ��
![]() (7)
(7)
���У�xr1Ϊ������Ⱥ�е�������壻xr2��xr3Ϊ����Ⱥ���е�������壻�˻����Ӧ�=(T-t)/T��TΪ����������tΪ��ǰ����������������F=Fmin+��(Fmax-Fmin)��
��ˣ�������1�仯Ϊ0ʱ��xr1��gbest��F�Ȳ����ܹ���������Ӧ�������㷨��ʼʱ��ȫ����������ǿ�������ھֲ�����������ǿ��
(3) �����������������ĸ���C=(c1��c2������cm)�븸������X=(x1��x2������xm)ͨ�����½���������õ��¸���X��=(x��1��x��2������x��m)��
![]() (8)
(8)
���У�![]() ��mΪ����ķ����������������
��mΪ����ķ����������������![]() �����������Ҳ������ģ���˻���ԣ�ȡ��������CRΪ��
�����������Ҳ������ģ���˻���ԣ�ȡ��������CRΪ��
![]() (9)
(9)
������1�仯Ϊ0ʱ��ǰ��CR��С�����ڱ������û�����CR���ӿ��������ٶȡ�ʽ(9)�У�CRmax��CRmin�ֱ�ΪCR���������Сֵ��
(4) �ж��¸���Ŀ����ԡ�ͨ������ͽ�������¸���X������ж�������ԣ���ͳ�Ʋ������¿��и�����ĿM1���²����и�����ĿM2��
(5) ѡ�����������˫Ⱥ���������ƣ�����Pareto���������Ŀ���Ż�������ѡ�������
�¿�����Ⱥ��ȷ������NF+M1��N1������ȫ�����н���Ϊ��һ��������Ⱥ������ѡȡĿ�꺯������Pareto���ŵ�ǰN1�����н⣬�����µĿ�����Ⱥ�����н⼯�и������Ӧ��Ŀ������������2��Ŀ������Pareto�ɱȣ�����Ŀ���������ŵĸ��壻���ɱȸ��壬�����������ľ��룬�������������С2�������е�1����ֱ��ѡ��N1���������һ��������ȺΪֹ��
�²�����Ⱥ��ȷ������NI+M2��N2������ȫ�������н���Ϊ��һ����������Ⱥ������ѡȡԼ������Pareto���ŵ�ǰN2�������н⣬�����µIJ�������Ⱥ�������н⼯�и������Ӧ��Լ��������������2��Լ������Pareto�ɱȣ�����Լ������Pareto���ŵĸ��壻���ɱȸ��壬����ȫ�������н���Լ�������ĸ��壬ֱ��ѡ��N2���������һ����������ȺΪֹ��
���绯���ƶ�Ŀ�����Ż��ĸĽ�DE�㷨����������ͼ3��ʾ��
3 ���������
Ϊ����֤���ĸĽ�DE�㷨������Ŀ�����Ż�����Ŀ������Լ�����ȥ��-���ִ�������������綪������Ч�ԣ�����IEEE30�ڵ�ϵͳ���з���ʵ�顣��ϵͳ����12�����Ʊ���������6��������ڵ㡢4̨��ѹ����2���������ڵ㡣�ڵ��ѹ�ϡ����ֱ�Ϊ1.10��0.95����ѹ������ϡ�����Ϊ1.10��0.90��ϵͳ��ʼ״̬���й�����ֵΪ17.557 MW��ѹ��Ϊ6.23���ڷ���ʵ������У���������Ĵ�������Ϊ200����Ⱥ��ģ����Ϊ50[14-15]��
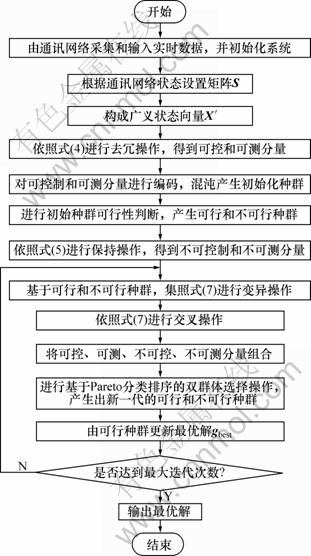
ͼ3 �����㷨����������ͼ
Fig.3 General flowchart of the proposed algorithm
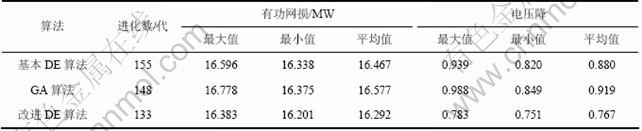
���ȼ���ϵͳ�п��Ʊ������ɿء�״̬�������ɲ⣬�ֱ���û���DE�㷨���Ŵ��㷨�ͱ���˫Ⱥ��Ľ�DE�㷨���ж�Ŀ�����Ż��ļ��㡣��3���㷨�������ѹ������������ͼ4��ʾ������3���㷨������10�Σ���ѡ�����ŵļ��������жԱȣ�������1��ʾ����ͼ4��֪���Ľ�DE�㷨���㵽133���ѻ������������Ž⣬������DE�㷨��GA�㷨��ֱ�����㵽155����148�����ܻ������������ҸĽ�DE�㷨��������������ں����߸�ƽ�����Ż�Ч��Ҳ���š��ӱ�1��֪�����ʼ״̬��ȣ����û���DE�㷨�����Ż����㣬�й�����6.21%����ѹ���½�85.88%������GA�㷨���㣬����5.58%����ѹ���½�85.25%�������ñ��ĸĽ�DE�㷨���㣬������7.21%����ѹ���½�87.69%�����ۺ϶ԱȺ��֣��Ľ�DE�㷨�й������ѹ�������ڻ���DE�㷨��GA�㷨����ˣ����øĽ����˫Ⱥ��DE�㷨������Ŀ�����Ż����⣬�ܹ����Ż����ܡ������ٶȺͽ���������Ͼ�����������ͳ�㷨��
Ϊ�˽�һ������ȥ��-���ִ��������������ݶ����������Ч�ԣ��趨IEEE30ϵͳ���ڲ��ɿر�����ĿN�����ɲ������ĿC�ֱ�Ϊ����4������� (a) N=3��C=0��(b) N=3��C=1��(c) N=5��C=0��(d) N=5��C=1���ҽ�ϱ��ĸĽ�DE�㷨�ֱ���������ݶ�������ϵͳ��δ����ȥ��-���ִ���ϵͳ������ȥ�ߣ����ִ���ϵͳ������ֱ���з�����㣬�����ͼ5��ʾ��������������
(1) ���绯�������Ż�ϵͳ��ʱ����������ģʽ����ɵ����ݶ�����������������ɿػ�״̬�����ɲ⣬�Ӷ�Ӱ��ϵͳ���Ż����ܡ����У����ɲ�״̬����ϵͳ��Ӱ������������иĽ�����Ӧ���Ż�������������ϵͳ���Ż������������Զ��ϵͳ�Ż��������Խ��͡�

ͼ4 ����DE�㷨��GA�㷨�Ľ�DE�㷨������ѹ����������
Fig.4 Loss and voltage drop convergence curves of basic DE, GA and improved DE algorithms
��1 ����DE�㷨��GA�㷨�뱾�ĸĽ�DE�㷨��10�μ������Ƚ�
Table 1 Comparison of ten times calculation results obtained by basic DE ,GA and improved DE algorithm
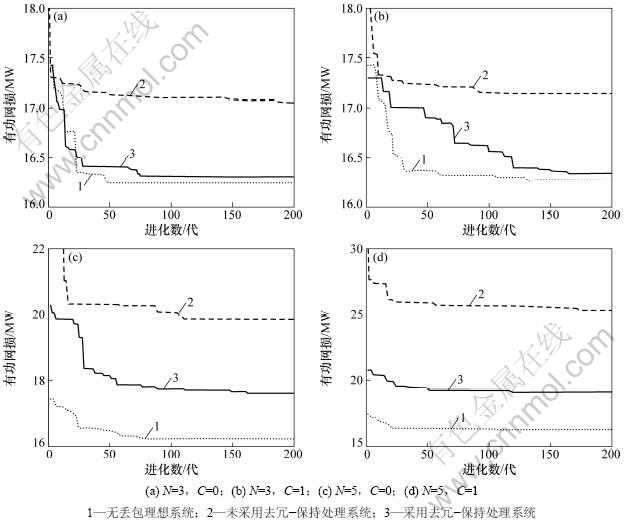
ͼ5 ������δ���ü�����ȥ��-���ִ���ϵͳ��������������
Fig.5 Loss convergence curves of ideal, without and with redundancy-removal and maintaining process systems
(2) ���ñ�����ȥ��-���ִ����������Խ�����ɿػɲ��������ϵͳ�����½����⣬ʹ�������Ż����������ϵͳ�ļ�������Ϊ�ƽ������ǣ����Ų��ɿػɲ������Ŀ���࣬�����㷨�Ľ����ϵͳ�����Դﵽ����״̬��
4 ����
(1) ���ʱ������ģʽ�¾������ݶ��������绯���ƶ�Ŀ�����Ż����⣬����Ƚ���ʽԼ��ת��Ϊ����ʽԼ������ͨ��˫Ⱥ���������ƣ�����Pareto��������ĸĽ�DE�㷨���д��������㷨�ľ����Ժ������ٶ��нϴ���ߡ�
(2) ���������ݶ�������IJ��ɿ�������ɲ�״̬��������ϵͳ�Ż����ܵ����⣬����ȥ��-���ִ���������ʹ���Ż�������ӽ�����ϵͳ��������㷨�ıƽ��ԡ��øĽ��㷨�����ܽϺõش�����Լ���Ķ�Ŀ�����Ż����⣬��������Ч�˷����紫����������ݶ�����Ӱ�졣
�ο����ף�
[1] �¹���, ���ǻ�, ������, ��. ����ϵͳ���Ż�LRS-PSO�㷨[J]. ����ϵͳ�����Զ���ѧ��, 2008, 20(4): 92-97.
CHEN Gong-gui, LI Zhi-huan, SUN Yong-fa, et al. LRS-PSO algorithm for optimal reactive power[J]. Electric Power System and its Automation, 2008, 20(4): 92-97.
[2] ����, �Ƶ�, �ް�. �������绯����ģ�͵ĸĽ����Ż��㷨[J]. ��������, 2011, 35(3):103-107.
PENG Ke, HUANG Dan, LUO An. An improved reactive power optimization algorithm based on networked control model[J]. Power System Technology, 2011, 35(3): 103-107.
[3] �η�Ծ. ���绯����ϵͳ�ڵ���ϵͳ�е�Ӧ���о�[D]. �人:����������ѧ��������ӹ���ѧԺ, 2006: 20-23.
HE Fei-yue. Application of Networked Control System in Power System[D]. Wuhan: East China University of Science and Technology. College of Electrical and Electronics Engineering, 2006: 20-23.
[4] ������, �ŷ���. ���ڸĽ���ֽ����㷨�ĵ���ϵͳ���ų�������[J]. ��������, 2010, 34(8): 123-128.
ZHAO Shu-ben, ZHANG Fu-sheng. Solution of optimal power flow based on differential evolution and its modified algorithm[J]. Power System Technology, 2010, 34(8): 123-128.
[5] ���ź�, ��־��, �ƽܲ�, ��. һ�ָĽ��Ľ����滮���������ڵ���ϵͳ���Ż��е�Ӧ��[J]. ��������, 2006, 30(4): 16-20.
LIANG Cai-hao, Chung Y, Wong K P, et al. An improved evolutionary programming method and its application in power system reactive power optimization[J]. Power System Technology, 2006, 30(4): 16-20.
[6] �Ϻ���, ��С��, ������. ����Լ����Ŀ���Ż������˫Ⱥ���ֽ����㷨[J]. �����ѧ��, 2008, 31(2): 228-235.
MENG Hong-yun, ZHANG Xiao-hua, LIU San-yang. A differential evolution based on double populations for constrained multi-objective optimization problem[J]. Chinese Journal of Computers, 2008, 31(2): 228-235.
[7] �����, ����, ����, ��. һ�����ڶ�Ŀ��Լ���Ż��ĸĽ������㷨[J]. �������������ϵͳ, 2009, 15(6): 1172--1178.
YU Guo-yan, LI Peng, HE Zhen, et al. Advanced evolutionary algorithm used in multi-objective constrained optimization problem[J]. Computer Integrated Manufacturing Systems, 2009, 15(6): 1172-1178.
[8] Ф��ΰ, Ф��, �ֽ���, ��. ��Ŀ���Ż�������о�����[J]. �����Ӧ���о�, 2011, 28(3): 805-808, 827.
XIAO Xiao-wei, XIAO Di, LIN Jin-guo, et al. Overview on multi-objective optimization problem research[J]. Application Research of Computers, 2011, 28(3): 805-808, 827.
[9] �����, Ҷ����, ��ΰ��, ��. ���ڸĽ��Ŵ��㷨�Ķ�Ŀ�����Ż�[J]. ��������, 2004, 28(11): 67-71.
ZHANG Wu-jun, YE Jian-feng, LIANG Wei-jie, et al. Multiple-objective reactive power optimization based on improved genetic algorithm[J]. Power System Technology, 2004, 28(11): 67-71.
[10] ����, ��˼��, Ф����, ��. ��Դ�����˲��������Ļ���ģ���˻��Ż����[J]. �����Զ����豸, 2009, 29(8): 55-58.
PENG Ke, WU Si-cong, XIAO Jian-hong, et al. Passive power filter parameter optimization based on chaos and annealing strategy[J]. Electric Power Automation Equipment, 2009, 29(8): 55-58.
[11] ��ռ֥, ������, ����. ��ʱ�Ӻ����ݰ���ʧ���������ϵͳ���������[J]. ���������, 2006, 21(6): 625-630, 635.
QIU Zhan-zhi, ZHANG Qing-ling, LIU Ming. Controller design for networked control systems with time-delay and data packet dropout[J]. Control and Decision, 2006, 21(6): 625-630, 635.
[12] ����Ȫ, ���ﺣ, ����. ����ʱ�ͺͶ��������绯����ϵͳ�ȶ��Է���[J]. ����������ѧѧ��, 2008, 28(4): 329-333.
ZHANG Yu-quan, ZHONG Qiu-hai, WANG Lin. Stability of networked control systems with time delays and data-packet losses[J]. Transactions of Beijing Institute of Technology, 2008, 28(4): 329-333.
[13] ����, ����. �������綪����ʱ�ӵ��������ϵͳ���[J]. ���������, 2011, 26(2): 293-296.
CHEN Qing, WU Min. Design of networked controller for systems with packet dropout and networked-induced delays[J]. Control and Decision, 2011, 26(2): 293-296.
[14] ��ʿ��, ��ܷ. ����ǿ��Pareto�����㷨�Ķ�Ŀ�����Ż�[J]. �ߵ�ѹ����, 2007, 33(9): 115-119.
FENG Shi-gang, AI Qian. Multi-objective reactive power optimization using SPEA2[J]. High Voltage Engineering, 2007, 33(9):115-119.
[15] Arya L D, Choube S C, Kothari D P. Reactive power optimization using static voltage stability index[J]. Electric Power Components and Systems, 2001, 29(7): 615-628.
(�༭ �²ӻ�)
�ո����ڣ�2012-01-10�������ڣ�2012-03-18
������Ŀ������ʡ��Ȼ��ѧ����������Ŀ(11JJ3080)������ʡ��У��ҵ��������Ŀ(11CY012)������ʦ����ѧ�����˲żƻ���Ŀ(ET51007)������ϵͳ��ȫ��������ƺ���ʡ��У�ص�ʵ���һ���������Ŀ(2011��)
ͨ�����ߣ�����(1973-)���У����������ˣ���ʿ�������ڣ�˶ʿ����ʦ���������绯���ơ�������������������ϵͳ��ص��о����绰��13975804087��E-mail��pengk@tom.com
ժҪ��������绯�������Ż�ϵͳ�нڵ�Ϊʱ�������Ĵ���ģʽ�����һ�ֶ�Ŀ���Ż��ĸĽ������㷨�����ȣ��������绯����ϵͳ�нڵ��ʱ���������¼�����2�ִ���ģʽ��������ʱ������ģʽ�����ݶ������������绯���ƶ�Ŀ�����Ż�ϵͳ����ѧģ�ͣ���������ȥ�ߣ����ִ�����������Σ�����һ�ֻ���˫Ⱥ���������ƵĸĽ���ֽ����㷨��ͨ����Լ�������Ŀ��кͲ�����˫Ⱥ�崦���������Ŀ���Ż�����������ֲ����ŵ����⣬���Ľ�����ͽ������������Ż��ٶ������ܡ��������IEEE 30�ڵ�ϵͳ���з�����㼰�������о�������������㷨�����ܱ�֤ϵͳ�ﵽ����״̬�����������ٶȡ������Լ��ƽ��Եȷ�����нϴ���ߡ�
