
DOI: 10.11817/j.issn.1672-7207.2016.12.016
����CPG�ķ�з�����˸��ӵ��β�̬���ɷ���
����1,2������3��������2������4��Ҷ���3
(1. ���������̴�ѧ ��������ѧԺ�������� ��������150001��
2. ���������̴�ѧ ˮ�»����˼����ص�ʵ���ң������� ��������150001��
3. ���������̴�ѧ �Զ���ѧԺ�������� ��������150001��
4. ����������ѧԺ ���繤��ѧԺ�������� ��������150050)
ժ Ҫ��
���˵ĸ��ӻ�����Ӧ�ԣ����һ�ֻ��������������������Ӧ���ӵ��β�̬���ɷ��������ȣ����û�����Ԫ����������з������CPG�˶���������ģ�ͣ���Σ����þ������ñƽ�������ǰ�������罫CPG����Ľ����ź�ӳ��Ϊ��������˹켣��Ȼ����CPGģ������������������������ķ�����ƣ�ʵ���˻���������Ӧ���ӵ��β�̬���ɣ����ͨ����з�����˸��ӵ����˶����Ƶ�ʵ���о�����֤������Ļ��������������������Ӧ���ӵ��β�̬���ɷ�������Ч�ԡ�
�ؼ��ʣ�
��з������������ģʽ������(CPG) ����̬���������ӵ�����
��ͼ����ţ� TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2016)12-4070-11
Gait generation method of crablike robot walking on complex terrain based on CPG
WANG Gang1, 2, HAN Jinhua3, HAN Shikai2, CHEN Xi4, YE Xiufen3
(1. College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, China;
2. Science and Technology on Underwater Vehicle Laboratory, Harbin Engineering University, Harbin 150001, China;
3. College of Automation, Harbin Engineering University, Harbin 150001, China;
4. College of Mechanical and Electrical Engineering, Heilongjiang Institute of Technology, Harbin 150050, China)
Abstract: In order to improve the environmental adaptability of crablike robot in complex terrain, an adaptive gait generation method for complex terrain was proposed based on biological neural reflex mechanism. Firstly, a CPG network model of the crablike robot was built by mutual inhibition neural oscillator. Secondly, the rhythm signals generated by CPG model were mapped to walking leg trajectory by neural network. Then, the reflection mechanism triggered by force sensor was added to CPG model, to realize the adaptive gait generation for complex terrain. Finally, the motion control experiments of crablike robot in complex terrain were carried out to verify the effectiveness of adaptive gait generation method for complex terrain.
Key words: crablike robot; central pattern generator (CPG); gait generation; complex terrain
��ѧ���ǽ�����㶯����ص��˶���ʽ�������˸��ָ�������ʽ���������ˣ��봫ͳ���ƶ���������Ⱦ��и��õĻ�����Ӧ�ԡ�����Լ��˶���ҵ����[1]������������о�����һ���ش�����������˶��Ŀ��ƣ��ر��Ƕ���Э�����ƣ������Ķ�������������˶����Ʒ�����Ҫ��3�֣��ֱ�Ϊ����ģ�͡���Ϊ�Լ������Ŀ��Ʒ���[2-3]������ģ�͵ķ������ý�ģ-�滮-���Ƶ�˼·���ܹ���ɾ�ȷ���ӵ�����ȱ���ǽ�ģ�������˶��滮���ӡ�������Ӧ�Բ������Ϊ�ķ������ø�֪-�����˼·�����Ƽ������нϺõĻ�����Ӧ�ԣ����Dz��ܶ���������ȫ�ֹ滮��ȱ���߲�������������������Ƕ������������ƻ��ƵĹ���ģ���ʵ�֣�������2�ֿ��Ʒ�����ȣ�����и��õ���˳�Ժͻ�����Ӧ�ԣ����й㷺���õ�һ���ǻ�������ģʽ������(CPG)�Ŀ��Ʒ���[4-5]���÷���ģ�Ⲹ�鶯��ĵͼ������࣬���Է������ȶ����Ӷ���������������˶�[6]�������˸��ӵĶ���ѧ��ģ�����п��Ƽ����ڡ������������������ǿ���ص㣬�ʺ϶�������������˶�����[7]����������������о�����һ����Ҫ�Ŀ���������ʵ�ָ��ӵ���������Ӧ��̬����[8]��KIMURA��[9]ͨ���Բ��鶯����ϵͳ��ģ�£��������ﷴ�佨ģʵ������������˵�CPG���ƣ�����˲�ƽ̹·������Ӧ���ߵĹ��ܣ�ARENA��[10]����CNN-CPG�ĵײ㲽̬���ƺ�MMC�ĸ߲���̬������ϵ���ϵķ���������˻����˸��ӵ�ò�������⣬ʵ���˻������ڲ�ƽ·���ϵ�����Ӧ���ƣ�TRAN��[11]����һ�����͵�CPG����������˲�̬���п��ƣ���CPGģ����ͨ���븵��Ҷ�任����ѭ��������Ľ�ϣ����Բ����ȶ������źţ������ڼ��뷴�����ƺ���̬����ģ�����ʵ��δ֪�������ȶ����ߡ�ZHANG��[12-13]����MATSUOKA����ģ�ͽ��������������Biosbot��CPG����ʵ�飬ʵ����ƽ̹·��Ľ��������ߺ������¡�Խ�ϡ����ϵȹ��ܣ��������[14]�������������ڹ��������̨�ȷ�������������ʱ���ֵ���̬ʧ�����⣬�����ģ��������������Ŀ���ֱ������ƽ����Ʒ������������˿�Խ���ֺ���̨��ʵ�顣�����ڸ��ӵ�������Ӧ�����о��д���ǽ��ǽṹ����ò���м������˿������ÿ�Խ�ķ�ʽͨ����ʵ�ʻ����д�����ĵ�ò���ǰ���ƽ�ģ����ÿ�Խ�ķ�ʽͨ������������ͨ��ʱ����Ի�����ɽϴ������������Է�з������Ϊ�о��������һ��ģ�������������������Ӧƽ����Ʒ��������û���Hopf����������CPG����ṹ�����������ʵ���˲��β�̬�����ɣ���CPGģ�������뷴����ƣ�ʵ���˸��ӵ��ε�����Ӧƽ����ƣ�������������ʵ�飬��֤�˸÷�������Ч�ԡ�
1 ��з������CPGģ��
1.1 ������ģ�ͽ���
CPG���Բ��������ԵĽ����ź����ڶ�������˲�̬�����ɡ����IJ���Hopf������Ϊ�����źŷ�������ģ�ͽṹ��ͼ1��ʾ��������ģ�͵��ŵ��Ǿ����ȶ���г�����������Ҽ�������״�������ڲ�����ѡ������źſɵ��ڡ�
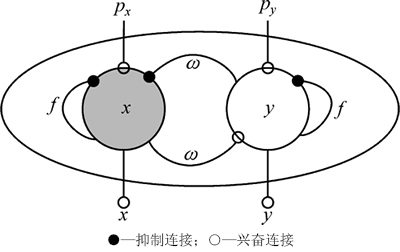
ͼ1 ����ģ��
Fig. 1 Oscillator model
2��������Ԫ��ɵ�����ģ��Ϊ
 (1)
(1)
ʽ�У�x��y�ֱ�Ϊ�˷ܡ�������Ԫ��������̺ͦ� (�̣�0�ͦأ�0)�ֱ�ΪӰ��ϵͳ�������Ƶ�ʵij������� (����0)Ϊ������ϵͳ�����ٶȵij�����px��pyΪ��練���ź����롣
������ʱ����px=py=0��1�����͵������������ַ�������ʽ��ʾ��
 (2)
(2)
1.2 �����Ĵ����Ժ��ȶ���
��ʽ(2)���Կ�������O(0,0)��1����㣬����ϵͳ�IJ��ȶ�ƽ��㡣Ҫ֤���伫���Ĵ����ԣ�ȡ ����
 (3)
(3)
ʽ(3)���� ���ɴ˿�֪
���ɴ˿�֪ ��һԲ����ʽ(3)��t���ɵã�
��һԲ����ʽ(3)��t���ɵã�


 (4)
(4)
��
 (5)
(5)
�� (
( )����ʱ��OΪ������ȫƽ����ȶ����㣬ϵͳ�����ڱչ��ߣ���
)����ʱ��OΪ������ȫƽ����ȶ����㣬ϵͳ�����ڱչ��ߣ��� (
( )����ʱ��OΪ���ȶ��Ľ��㡣��hȡ��ִ�ʱ��F(x��y)=hԲ���ϵ�x2+y2�㹻��ʱ���Ӷ�ʹϵͳ���������������Բ�ཻ�Ĺ��ߡ�����Poincare-Bendixson������֪��ϵͳ��������ȶ��ļ�����
)����ʱ��OΪ���ȶ��Ľ��㡣��hȡ��ִ�ʱ��F(x��y)=hԲ���ϵ�x2+y2�㹻��ʱ���Ӷ�ʹϵͳ���������������Բ�ཻ�Ĺ��ߡ�����Poincare-Bendixson������֪��ϵͳ��������ȶ��ļ�����
��ϵͳ���м���Ψһ���ж���ȡ���� ��
�� ������
������ ��
��  ��D�ǻ���������㣬
��D�ǻ���������㣬 ���ڻ���D����
���ڻ���D����





 (6)
(6)
���ڦ���0�����ԣ�
 (7)
(7)
��Bendixson-Dulac������֪������ϵͳ������1�����������������ڣ�һ�����ȶ�������ǰ���Ѿ�֤���������ڣ���ˣ��ü���һ����Ψһ�ȶ����ڵġ��������һ���������=2����=1����=2�У���ϵͳ���ⲿ�������룬�õ����������ļ�����ͼ2��ʾ����ͼ2��֪�����������ij�ʼ״̬��Σ�����������ڵĽ��������������� ������
������
1.3 �������������λԤ��
Ϊ��ʵ�ַ�з�����˲��β�̬�����ɣ���Ҫ������֮�����ϻ��ƽ����о�������2�����������ģ����ͼ3��ʾ����ģ�Ϳ��������з������ַ������ʾ��

ͼ2 ����������
Fig. 2 Limit cycles of neural oscillator

ͼ3 2��������ϵ�����
Fig. 3 Two mutually coupled oscillators
 (8)
(8)
ʽ�У� ��
�� Ϊ״̬������
Ϊ״̬������ ��
�� Ϊ�Ŷ���������ǰ��ķ�����֪������״̬���������ü�������б�ʾ����ˣ���������״̬�����ַ�����(9)�ڼ��������ð뾶����λ��ʾ ���£�
Ϊ�Ŷ���������ǰ��ķ�����֪������״̬���������ü�������б�ʾ����ˣ���������״̬�����ַ�����(9)�ڼ��������ð뾶����λ��ʾ ���£�
 (9)
(9)
ʽ�У���Ϊ״̬��������λ��rΪ״̬�����ķ�ֵ����0Ϊ���Ŷ���ϵͳ��Ȼ��Ƶ�ʣ�Fr(r����)Ϊ�뾶r����ʱ�䶯̬�仯��p����pr�ֱ�Ϊ����Ŷ����õ�״̬������λ�ͷ�ֵ�ϵijɷ֡�
����2��������ϵ��������������λ������ʽ���㣺
 (10)
(10)
ʽ�У���1�ͦ�2�ֱ�Ϊ��������1��2����λ����dΪ2�����������������λ��
Ϊʹ���������������λ����Ԥ�⣬����2����ת����R1��R2��
 (11)
(11)
 (12)
(12)
ʽ�У���RΪ��ת������ת�ǡ�
2������֮�����Ϲ�ϵΪ
 (13)
(13)
ʽ�У�PΪ2������״̬���������Ͼ�����������о��н���ȡΪ��λ����ʾ1�������ı���y���ܵ��������������x��Ӱ�죻��Ϊ��ϳ�����p1��p2Ϊ��������֮�以���Ŷ��ɷ֣���ʽ(11)��(12)����ʽ(13)�ɵã�
 (14)
(14)
ͨ������ϵͳ״̬�ռ�ͼ2��֪����λ�����ı仯ֻ����λ�ȷ����ϵ��Ŷ����й�ϵ��Ҳ�����뼫���������ϵ��Ŷ����ɷ���ء��뼫�����еĵ�λʸ��������ʽ���м��㣺
 (15)
(15)
��ˣ�2�����������λ֮��Ļ�����ų� ��Ϊ
 (16)
(16)
���Եõ�����������λ�����IJ�ֵ��

 (17)
(17)
ʽ�У� ��ʽ(17)�Ǧ�d�ͦ�2�ĺ�������������ͨ��ֻ����ϵͳ�ﵽ�ȶ����״̬����˵�ϵͳ�ﵽ�ȶ�������״̬��Է���(11)��������2������л���Ӧ����0��
��ʽ(17)�Ǧ�d�ͦ�2�ĺ�������������ͨ��ֻ����ϵͳ�ﵽ�ȶ����״̬����˵�ϵͳ�ﵽ�ȶ�������״̬��Է���(11)��������2������л���Ӧ����0��


 (18)
(18)
�ɴ˿ɵã�
 (19)
(19)
��2��������Ƶ����ͬʱ������d=0����֪2�����������λ�����ɦ�RΨһȷ�������㹫ʽ���£�
 (20)
(20)
������ת����������������������ַ��̿ɱ�ʾΪ
 (21)
(21)
1.4 ��з������CPG���繹��
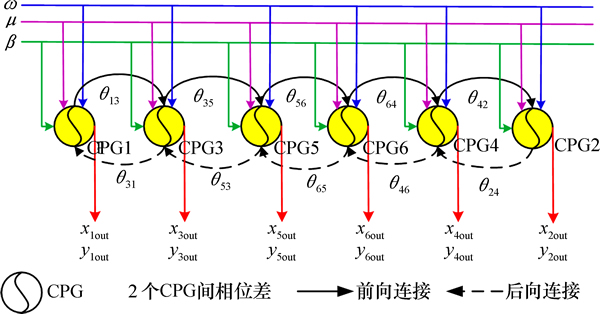
��з�����˾��ж�ؽ��������ɶȣ����ÿ���ؽڶ�����1���������п��ƻ�ʹ����ϵͳ��ø��ӣ�����ʵʱ�ԺͿɿ��ԡ���Զ�������˳����õIJ��β�̬��ֻҪ���ڲ�����֮����λ��ȷ������̬���;Ϳ���Ψһȷ�������о��л����˵�ÿ�����������1��Hopf������Ϊ���������Լ�����������Ŀ����������֮�����ӱ�ʾ���ϣ���������֮�������ʵ�ֲ�����������λ��Ԥ�⣬������з������CPG������ͼ4��ʾ��ͼ4�У��أ��̺ͦ�Ϊ���Ը߲�Ŀ����źţ���ʾ������Ƶ�ʡ�����Ͳ�̬ռ��ϵ�����ֱ���ƻ������˶������ڡ������Ͳ�̬���ͣ�xiout��yiout(i=1������6)Ϊ��������������źţ�CPG1��CPG3��CPG5���ƻ���һ��ĵ�1��3��5�ȣ�CPG2��CPG4��CPG6���ƻ�����һ��ĵ�2��4��6�ȡ�����ǰ��Ի��������ķ�����������з������CPG������ѧģ��Ϊ
ͼ4 ��з������CPG����
Fig. 4 CPG network of crablike robot
 (22)
(22)
ʽ�У�i=1������6��Ϊ�����˵���������jΪ��i��ϵ�CPG��Ӧ������ţ���Ϊ���ϵ������ijΪi��j 2��������֮�����λ������ij=-��ji��ϵ����iΪ����CPG����Ƶ�ʣ�Ϊ��ʵ�ֻ������˶��ٶȵĵ�����������ʽ����ռ��ϵ����CPG��Ƶ��֮��� ��ϵ��
 (23)
(23)
ʽ�У�aΪ1�����������������Ϊ��Ȼ��Ƶ�ʣ���stance�ͦ�swing�ֱ�Ϊ֧���ࡢ�ڶ���Ƶ�ʡ���ʽ(16)��֪��״̬����x����Ƶ���� �ͦ�֮�佻��仯����y��0����Ƶ��Ϊ����Ӧ�������֧���ࣻ��y��0����Ƶ��Ϊ�أ���Ӧ������İڶ��࣬��ͼ5��ʾ�����Կ���x���������ֶ�Ӧ��̬�İڶ��࣬��ʱ״̬����y��0��x���½����ֶ�Ӧ��̬��֧���࣬��Ӧy��0��
�ͦ�֮�佻��仯����y��0����Ƶ��Ϊ����Ӧ�������֧���ࣻ��y��0����Ƶ��Ϊ�أ���Ӧ������İڶ��࣬��ͼ5��ʾ�����Կ���x���������ֶ�Ӧ��̬�İڶ��࣬��ʱ״̬����y��0��x���½����ֶ�Ӧ��̬��֧���࣬��Ӧy��0��

ͼ5 �˶���������ź�֮��Ĺ�ϵ
Fig. 5 Relationship between relative phase and rhythm signal
2 ������������˹켣����
Ҫ�뽫CPGģ�����ɵĽ������ź����ڻ����˵��˶����ƣ�Ӧ���������ź���ؽ������ź�֮��ӳ���ϵ����ʱ��Ľ����ź�ͨ��ǰ��������FFNNӳ�䵽�����������˹����ռ䣬ֱ�Ӷ���˹켣���п��ơ�
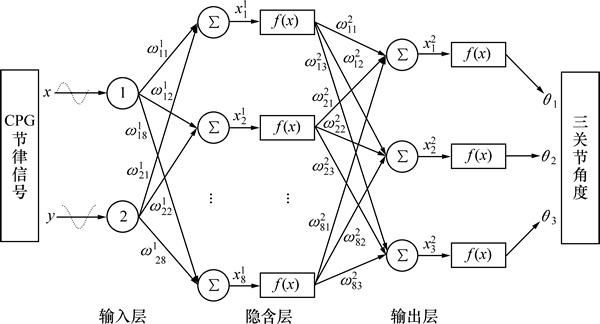
Ϊ��ʵ�ַ����Կռ��ת�������ü�������ΪSigmoid������ ��2��FFNN��ͨ��ʹ��BP�㷨ѵ�����Եõ���Ԫ֮�����ӵ�Ȩֵ��FFNN������ṹ��ͼ6��ʾ����ͼ6��֪����������������㡢�����㡢�����3����ɡ�����ʸ��Ϊ��ά�������˵�����������Ľ����źţ�������Ӧ��Ϊ��ά�������˵��������3���ؽ�������������������Ԫ��Ŀ�����ӻᵼ�����ɵ���˵�켣�����ӣ��ۺϿ�����������Ԫ����ĿѡΪ8����
��2��FFNN��ͨ��ʹ��BP�㷨ѵ�����Եõ���Ԫ֮�����ӵ�Ȩֵ��FFNN������ṹ��ͼ6��ʾ����ͼ6��֪����������������㡢�����㡢�����3����ɡ�����ʸ��Ϊ��ά�������˵�����������Ľ����źţ�������Ӧ��Ϊ��ά�������˵��������3���ؽ�������������������Ԫ��Ŀ�����ӻᵼ�����ɵ���˵�켣�����ӣ��ۺϿ�����������Ԫ����ĿѡΪ8����
�����ѵ���������¡�
1) ��ʼ����������Ȩֵ�����������Сֵ��
2) ����ѵ�����ݼ������ṩ��������Xp(CPG����Ľ����ź�)�������������Yp(�������ؽ��˶��Ƕ�)�������ѵ����������4������ģʽ(Xp��Yp)(p=1��2��3��4)���ֱ��Ӧ��=1/2��2/3��3/4��5/6��4�ֲ�̬��
3) ����ʵ�����Y��

4) ����Ȩֵ��������������Ȩֵ������ʽ��˳�ν�������������֮����Ȩֵ�ĵ������Լ�����������֮����Ȩֵ�ĵ�����
ͼ6 FFNN������ṹ
Fig. 6 Structure of FFNN neural network
5) ���ص�2)���ظ���ֱ���������ȨֵҪ��Ϊֹ��
3 ����CPG������Ӧ�Բ�̬����
3.1 ����CPG���β�̬����
��̬��ָ����Ϊ��ʵ�������ƶ�����ɵĸ��������̧�������ȵ�˳���ϵ[15]������ƽ̹·�����н������ڶ�IJ�̬�У����β�̬��Ч��������ȶ�����õ�һ�ֲ�̬[16]��Ϊ�˶Է�з�����˲��β�̬���ɺ�ת�������о������ȸ���6�㶯�ﲨ�β�̬����ѧ����[17]��
 (24)
(24)
ʽ�У�TPΪ�����㴦�ڰڶ����ʱ�䣬��i��n�أ�Ϊ��ֵ��TWΪ��̬���ڣ���ȡֵ��Χ ��
�� Ϊ��i���������n���ij�ʼʱ�̡����У��ڶ���ʱ��TP��ռ��ϵ��������
Ϊ��i���������n���ij�ʼʱ�̡����У��ڶ���ʱ��TP��ռ��ϵ��������
 (25)
(25)
��ʽ(24)��(25)��֪������ͬ�����ڲ��������λ�� ������Գ�������IJ��������λ��
������Գ�������IJ��������λ�� ���������Ĺ����ķ�з������CPG���磬ͨ���߲����������ռ��ϵ������ʵ�ֲ�ͬ��̬���ת�����趨CPG��Ƶ��
���������Ĺ����ķ�з������CPG���磬ͨ���߲����������ռ��ϵ������ʵ�ֲ�ͬ��̬���ת�����趨CPG��Ƶ�� �����
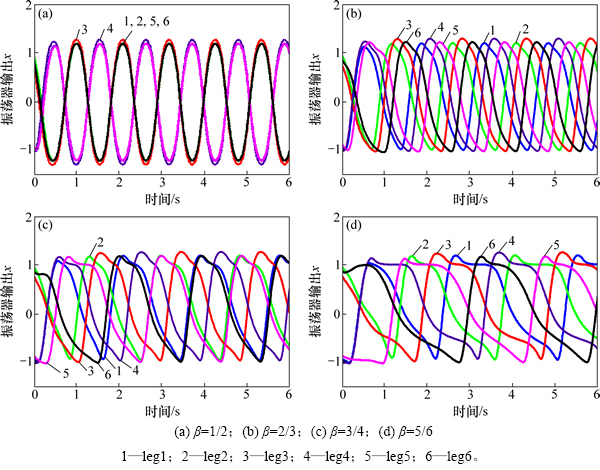
����� �Բ��β�̬�е�4�ֵ��Ͳ�̬(ռ��ϵ����=1/2��2/3��3/4��5/6)���з���������õ������ź�������ߣ���ͼ7��ʾ����ͼ7���Կ�����������һ�������ڶ�Ӧ�����˵�1����̬���ڣ���ռ��ϵ����=1/2��2/3��3/4��5/6��ͬ���β�̬�»����˵IJ�̬���ڷֱ�ΪT=1��1.5��2��3 s����ʼ�в�������ź�(��Ϊ��ʼ��������������ȷ)����1�������ں�������źų����˽����ԡ����ݵõ��Ľ����źſ��Ի�����Ӧ�IJ�̬ʱ��ͼ����ͼ8��ʾ��
�Բ��β�̬�е�4�ֵ��Ͳ�̬(ռ��ϵ����=1/2��2/3��3/4��5/6)���з���������õ������ź�������ߣ���ͼ7��ʾ����ͼ7���Կ�����������һ�������ڶ�Ӧ�����˵�1����̬���ڣ���ռ��ϵ����=1/2��2/3��3/4��5/6��ͬ���β�̬�»����˵IJ�̬���ڷֱ�ΪT=1��1.5��2��3 s����ʼ�в�������ź�(��Ϊ��ʼ��������������ȷ)����1�������ں�������źų����˽����ԡ����ݵõ��Ľ����źſ��Ի�����Ӧ�IJ�̬ʱ��ͼ����ͼ8��ʾ��
��ͼ8���Կ�����4�ֲ�̬�ڶ���ʱ�������ͬ����֧����ʱ�䲻ͬ��ռ��ϵ����=1/2ʱ��Ӧ������˳�����Ϊ��(4��5��1)��(6��3��2)(�����ڵ����ִ���ͬʱ�����IJ���������)���ڶ����֧�������ʱ�������ͬ����=2/3ʱ��Ӧ������˳�����Ϊ��6��1��4��5��2��3��֧����ʱ������ǰڶ���ʱ���2������=3/4ʱ��Ӧ������˳�����Ϊ��(6��1)��4��(5��2)��3��֧����ʱ������ǰڶ���ʱ���3������=5/6ʱ��Ӧ������˳�����Ϊ��6��4��2��5��3��1��֧����ʱ������ǰڶ���ʱ���5����������[17]�����ᵽ�����㲨�β�̬��ȫ�Ǻϣ��ɼ�����CPGģ�ͷ�з�����˲��β�̬�������ǿ��еģ���֤��ǰ�潨���ķ���������ģ�͵���ȷ�ԡ�
ͼ7 CPG�����������
Fig. 7 Output curve of CPG network

ͼ8 ��̬ʱ��ͼ
Fig. 8 Sequence diagram of gait
3.2 ����CPG����Ӧ�����о�
�������ڶ�̬����ʱ�������������ƽ�ĸ��ӵ��Σ��ͻ�����ȶ��Բ���岨�����ҵ����⡣Ϊ��ʹ�������ܹ�Ӧ�����ָ��ӵ��Σ����뽨�������Ŀ��Ʋ��ԡ����Ľ�����ﴥ������Ļ����������ƽ���ӵ��Σ���������˿ɴ�ռ�켣�⣬ͨ���任��˹켣����Ӧ���ӵ��Σ���ǿ���������ߵ��ȶ��ԡ������˶������ѹ���źŴ�����
Ҫʵ�ֻ������ڸ��ӵ��ε�����Ӧ���ƣ����Ƚ����ɴ�ռ��ڵ���˹켣�⡣�ڻ����˵�������ϵXZƽ���ڹ滮��˹켣����ͼ9��ʾ��
ͼ9��X����Ϊ�������н�����Z����Ϊ��ֱ�������ϵķ��������ڸ��ӵ����н�ʱ�������������Ͱ���ӳ�䵽XZƽ���ڱ���ΪZ����IJ�ͬ�����ݻ����˵Ĺؽ��˶���Χͨ���˶�ѧ����������˿ɴ�ռ䣬ӳ�䵽XZƽ��ɵ������Z������˶���Χ[-200��200] mm����Ҳ�ǻ����˲�������Կ�Խ���ϰ����ֵķ�Χ�����ɴ�ռ�Z��������Ϊn��(n���ݿ��ƾ��ȶ���)���滮��n����״��ͬ��Z���겻ͬ�Ĺ켣���浽�켣�⡣

ͼ9 ��˹켣�滮
Fig. 9 Foot trajectory planning
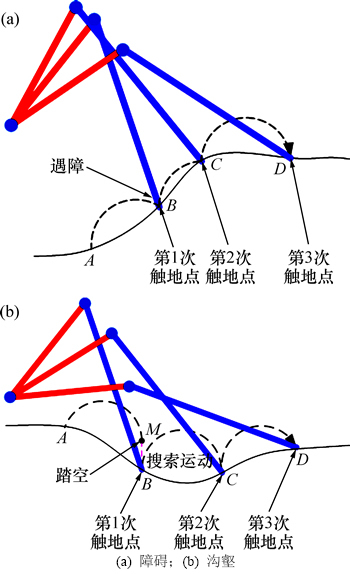
��������ƽ̹·�����������˶�ʱ��ÿ�����������ڵ��Ƚ���֧�����ʱ���ǹ̶��ģ��趨1������ֵFT��ͨ�����ѹ�������������ֵ��С������������������ֵʱ����Ϊ�����˴��أ����Եõ������˵���������ʱ��ttouch����t��ttouchʱ�̻����˼����ѹ��F��FT������Ϊ�����˲ȵ��ϰ����أ��������Ϸ��䣻��t=ttouchʱ�̻����˼����ѹ��F=0������Ϊ�����˲ȵ����ֶ�û�д��أ�����̤�շ��䡣�������ڰ���ƽ����·������ʱ�������ϰ�������Ӧ����滮��˹켣������ͼ10��ʾ��
ͼ10 ���ӵ��η���滮����
Fig. 10 Planning trajectories of reflex over complex terrain
��������Ϸ����̤�շ�����ڹ������¡�
1) ���Ϸ��䡣�����������߹�����ij���Ȳȵ��ϰ������ȶ�ӦCPGͣ���ڴ��ص�ȴ������ڶ��ȷ��������źţ������аڶ��ȶ����������źź��л���֧���࣬CPG�������ӹ켣���е�����Ӧ�Ĺ켣�����������Ȱ����µĹ켣�˶���ʵ���ϰ�·��ƽ�����ߡ�
2) ̤�շ��䡣�����������߹�����ij���Ȳȵ����֣�CPG����ֹͣ�������ȵȴ���ͨ���߲����������̤����ʵ�������˶���̤���Ȳȵ����ֵײ������������źţ��л���֧���࣬CPG�����������ӹ켣���е�����Ӧ�Ĺ켣������̤���Ȱ����µĹ켣�˶���ʹ������ƽ��ͨ������·�档
4 ʵ���о�
Ϊ������CPG ������ϵ�����Ĵ�������з������ʵ��ƽ̨����ͼ11��ʾ����ϵͳ������λ�������նˡ�Ƕ��ʽPC104�������������������

ͼ11 ��з�����˿�����ϵ
Fig. 11 Control system of crablike robot
��λPC�������ն�ͨ��TCP/IP����ͨ��Э���Ƕ��ʽPC104���巢������ָ�ͬʱ���ջ���������״̬���ⲿ�����ķ�����Ϣ��ʵ�ְ��������ƣ�Ƕ��ʽPC104���弯���ڻ��������ڣ������ںϴ�����Ϣͨ���ڲ��㷨ʵ�ֻ������˶��滮�����������ͨ������RS232��Ƕ��ʽPC104����ͨ�ţ������˶�ָ�������������˶���
4.1 ƽ̹����ʵ��
���ڽ��л���CPG��̬���ɵ�ƽ������ʵ�飬�趨CPG��Ƶ�������(��Ӧ���������߲���Ϊ100 mm)����ռ��ϵ��Ϊ1/2��2/3��3/4��5/6�IJ��β�̬ʵ�顣 ʱ��Ӧ��������˳��������Dz�̬��ʵ�������ͼ12��ʾ��
ʱ��Ӧ��������˳��������Dz�̬��ʵ�������ͼ12��ʾ��

ͼ12 ռ��ϵ��1/2 ����ʵ��
Fig. 12 Walking test in duty factor 1/2
ʵ���û����˲����IJ��β�̬�����н�ʱ��1����̬���ں�ʱ1 s���������˶��ٶ�Ϊ0.1 m/s������ �IJ��β�̬�н�����Ӧ�İ���˳��Ϊ��6��1��4��5��2��3��1����̬���ں�ʱ1.5 s���������˶��ٶ�Ϊ0.067 m/s������
�IJ��β�̬�н�����Ӧ�İ���˳��Ϊ��6��1��4��5��2��3��1����̬���ں�ʱ1.5 s���������˶��ٶ�Ϊ0.067 m/s������ �IJ��β�̬�н���Ӧ�İ���˳��Ϊ��(6��1)��4��(5��2)��3��1����̬���ں�ʱ2s���������˶��ٶ�Ϊ0.05 m/s������
�IJ��β�̬�н���Ӧ�İ���˳��Ϊ��(6��1)��4��(5��2)��3��1����̬���ں�ʱ2s���������˶��ٶ�Ϊ0.05 m/s������ �IJ��β�̬�н�ʱ��Ӧ�İ���˳��Ϊ��6��4��2��5��3��1��1����̬���ں�ʱ3 s���������˶��ٶ�0.033 m/s�������õ��Ļ����˲�̬ʱ������ڣ����һ�£�֤���˻���CPG��з�����˲��β�̬���ɵĿ����ԡ�
�IJ��β�̬�н�ʱ��Ӧ�İ���˳��Ϊ��6��4��2��5��3��1��1����̬���ں�ʱ3 s���������˶��ٶ�0.033 m/s�������õ��Ļ����˲�̬ʱ������ڣ����һ�£�֤���˻���CPG��з�����˲��β�̬���ɵĿ����ԡ�
4.2 ���ӵ���ʵ��
��Ը��ӵ����µĵ�������Ӧ���ƽ����о���ʵ�������ͼ13��ʾ���ڻ����˵��н�·���Ϸֱ���Ϻ��Ϊ30 mm��50 mm���ϰ�����ģ�ⰼ��ƽ��·�档ʹ�����˵�1����leg1���˶������вȵ��ϰ����������ǰ�н���ʵʱ�ɼ�������leg1�ĹؽڽǶȱ仯����ͼ14��ʾ��

ͼ13 ��������Ӧ����ʵ��
Fig. 13 Adaptive walking experiment of single leg

ͼ14 ��������Ӧ�ؽڽǶȱ仯
Fig. 14 Adaptive joint angle changes of single leg
��ͼ14���Կ������ŹؽڵĽǶ� ʼ�ձ��ֲ��䣬������Ϊ�����˺���ֱ��û���õ��Źؽڣ���ϥ�ؽڽǶȦ�2���ؽڽǶȦ�3�����Ա仯����������ƽ̹·�����߲ȵ���1���ϰ��������Ϸ��䣬leg1�����������ϰ��߶ȣ��ڹ켣����������Ӧ�켣���л���˹켣�����н��������1���ϰ��ȵ���2�����ߵ��ϰ����ٴδ������Ϸ��䣬leg1���ݵ�2���������ϰ��߶ȣ��ڹ켣����������Ӧ�켣���л���˹켣����Ӧ�ϰ����Σ��������ߣ������2���ϰ��ص�ƽ̹·�棬�൱�������˹��֣�����̤�շ��䣬leg1���ݴ�ʱ����߶ȣ��ڹ켣����������Ӧ�켣���л���˹켣����Ӧ�µĵ��Ρ�ͨ���任��˹켣�ķ���ʵ���˷�з�������ڸ��ӵ����µĵ�������Ӧ���ơ�
ʼ�ձ��ֲ��䣬������Ϊ�����˺���ֱ��û���õ��Źؽڣ���ϥ�ؽڽǶȦ�2���ؽڽǶȦ�3�����Ա仯����������ƽ̹·�����߲ȵ���1���ϰ��������Ϸ��䣬leg1�����������ϰ��߶ȣ��ڹ켣����������Ӧ�켣���л���˹켣�����н��������1���ϰ��ȵ���2�����ߵ��ϰ����ٴδ������Ϸ��䣬leg1���ݵ�2���������ϰ��߶ȣ��ڹ켣����������Ӧ�켣���л���˹켣����Ӧ�ϰ����Σ��������ߣ������2���ϰ��ص�ƽ̹·�棬�൱�������˹��֣�����̤�շ��䣬leg1���ݴ�ʱ����߶ȣ��ڹ켣����������Ӧ�켣���л���˹켣����Ӧ�µĵ��Ρ�ͨ���任��˹켣�ķ���ʵ���˷�з�������ڸ��ӵ����µĵ�������Ӧ���ơ�
��ʵ���˵�������Ӧ����֮���Ľ�һ���о��˻����˲��β�̬����ʱ������Э������Ӧƽ����Ʋ��Բ���������Ӧʵ�顣�Բ��β�̬�е�һ�ֵ��Ͳ�̬���Dz�̬()�������ص��о������ú�ȷֱ�Ϊ50��20��40 mm���ϰ�����ģ�⸴�ӵ��ν������飬ʵ�������ͼ15��ʾ��
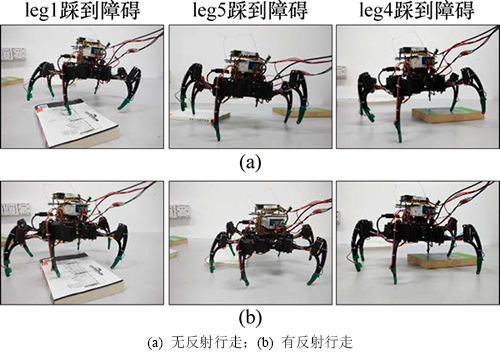
ͼ15 ���ӵ�������Ӧƽ�����ʵ��
Fig. 15 Adaptive balancing control test in complex terrain
�ڻ����˵��н�·��������ڷŲ�ͬ��ȵ��ϰ��ģ�ⰼ��ƽ��·�棬ʹ�û�����ÿ��������ȵ��ϰ�������˺����н��������ϰ����Ժ�����Ӧ�ķ��䣬��Ӧ���л���˹켣����Ӧ���ӵ��Ρ��õ������˹ؽڽǶȱ仯��ͼ16��ʾ(���У�RijΪ��i���ȵ�j���ؽ�)��
��ͼ16�����˹ؽڽǶȱ仯���Կ�����leg1��leg5��leg4���βȵ���ͬ�߶��ϰ���ֱ����Ϸ��䣬�л���Ӧ�켣����Ӧ��ͬ�߶��ϰ������ϰ����Ժ�leg1��leg5��leg4���λص�ƽ̹·�棬�൱�ڴӸߴ�̤���˹��֣��ֱ�̤�շ��䣬�л���Ӧ�켣���������ڸ��ӵ�������ʱ��ͨ����װ�ڻ������Ǵ�����ʵʱ����������̬�Ƕȵı仯���������ڸ��ӵ�������ʱ������ĸ����Ǻͷ����DZ仯��ͼ17��ʾ��
��ͼ17���Կ���������������£���leg1�ȵ��ϰ����������1�����ĸ����Ǻ�1�����ķ����ǣ�����������������Һ��㷭������������leg5�ȵ��ϰ�����������1�����ĸ����Ǻ�1�����ķ����ǣ��������������������leg4�ȵ��ϰ������1�����ĸ����Ǻ�1����С�����ǣ����������������ǰ�㷭����ͼ15(a)�Ļ�����ʵ���������һ�¡����뷴���Ժ�leg1��leg5��leg4���βȵ���ͬ���ϰ�ʱ������ĸ����Ǻͷ����DZ仯��С�����������״̬����̬�Ƕȱ仯���Լ�С50%���ң������˻��������ȶ�����ͼ15(b)��ʾ�Ļ�����ʵ���������һ�¡�ͨ�����������˵���̬ʹ�����ø����ȶ����������ȶ��Եõ���ߣ�֤���ÿ��Ʒ�����Ը��ӵ�������Ч�ġ�

ͼ16 �ؽڽǶȱ仯
Fig. 16 Changes of robot joint angle
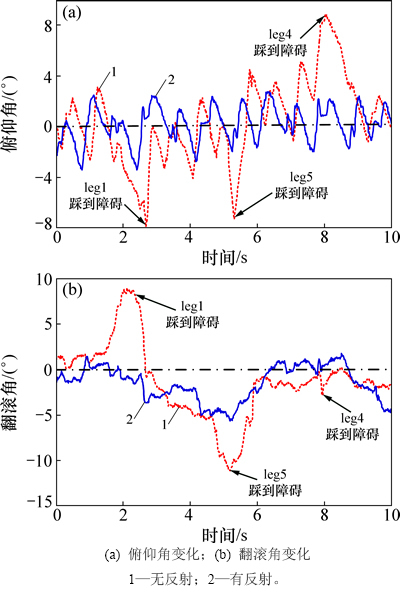
ͼ17 �����˻�����̬�Ƕ�����
Fig. 17 Posture curves of robot body
5 ����
1) ���ڻ�����Ԫ����ģ�ͣ������˷�з������CPG���磬����������ʵ����CPG��������źŵ���˹켣��ӳ�䡣
2) ��CPGģ������������������������ķ�����ƣ�ʵ�ֻ���������Ӧ���ӵ��β�̬���ɣ������ƽ̹·����ӵ����µĻ���������ʵ�顣
3) ƽ̹·���»����˿������û���CPG���ɵIJ��β�̬����ƽ�����ߣ�����ٶȿ��Դﵽ0.1 m/s���ڸ��ӵ����»����˿���ƽ�ȸ�Ч��ͨ����·�棬��Ч���ƻ������̬�Ƕȱ仯��������������ȣ����帩�������Ƕȱ仯���Լ�С50%������˻����˵��ȶ��ԡ�
4) ���������ģ�������������������Ӧ��̬���ɷ��������ԽϺõ���Ӧ���ӷǽṹ���Σ����ڴٽ���з�����˵�ʵ��Ӧ�þ�����Ҫ���塣
�ο����ף�
[1] SOYGUDER S, ALLI H. Kinematic and dynamic analysis of a hexapod walking�Crunning�Cbounding gaits robot and control actions[J]. Computers & Electrical Engineering, 2012, 38(2): 444-458.
[2] �����. ����CPG�����������������߲�̬�滮�����о�[D]. ������: ��������ҵ��ѧ�����о���Ժ, 2013: 6-8.
LIU Weihua. Gait planning methed for hexapod robot based on cpg rhythm generator network[D]. Harbin: Harbin Institute of Technology. Shenzhen Graduate School, 2013: 6-8.
[3] KIMURA H, FUKUOKA Y, COHEN A H. Adaptive dynamic walking of a quadruped robot on natural ground based on biological concepts[J]. The International Journal of Robotics Research, 2007, 26(5): 475-490.
[4] STEINGRUBE S, TIMME M, W RGTTER F, et al. Self-organized adaptation of a simple neural circuit enables complex robot behaviour[J]. Nature Physics, 2010, 6(3): 224-230.
RGTTER F, et al. Self-organized adaptation of a simple neural circuit enables complex robot behaviour[J]. Nature Physics, 2010, 6(3): 224-230.
[5] WANG Tingting, GUO Wei, LI Mantian, et al. CPG control for biped hopping robot in unpredictable environment[J]. Journal of Bionic Engineering, 2012, 9(1): 29-38.
[6] ZHANG Daibing, HU Dewen, SHEN Lincheng, et al. Design of an artificial bionic neural network to control fish-robot��s locomotion[J]. Neurocomputing, 2008, 71(4): 648-654.
[7] ������, ��ΰ, �ں���, ��. ���� CPG �����㲽�л������˶�����ϵͳ�о�[J]. ��е�����, 2010(8): 65-68.
WANG Shaozhi, GUO wei, YU Haitao, et al. Study on Motion System of a Six-legged Walking Robot Based on CPG[J]. Machinery & Electronics, 2010(8): 65-68.
[8] ������, ����, ������, ��. һ�ֲִڵ�����������������˵���˳��̬���ɷ���[J]. ������, 2014, 36(5): 584-591.
E Mingcheng, LIU hu, ZHANG Xiuli, et al. Compliant gait generation for a quadruped bionic robot walking on rough terrains[J]. Robot. 2014, 36(5): 584-591.
[9] KIMURA H, FUKUOKA Y. Biologically inspired adaptive dynamic walking in outdoor environment using a self-contained quadruped robot:'Tekken2'[C]//IEEE International Conference on Intelligent Robots and Systems. Sendai: IEEE Computer Society, 2004: 986-991.
[10] ARENA P, FORTUNA L, FRASCA M, et al. A CNN-based chip for robot locomotion control[J]. IEEE Transactions Circuits and Systems I: Regular Papers, 2005, 52(9): 1862-1871.
[11] TRAN D T, KOO I M, VO G L, et al. A new method in modeling Central Pattern Generators to control quadruped walking robots[C]//IEEE International Conference on Intelligent Robots and Systems. St. Louis: IEEE Computer Society, 2009: 129-134.
[12] ZHANG Xiuli, ZHENG Haojun. Walking up and down hill with a biologically-inspired postural reflex in a quadrupedal robot[J]. Autonomous Robots, 2008, 25(1/2): 15-24.
[13] ZHANG Xiuli, ZHENG Haojun. Autonomously clearing obstacles using the biological flexor reflex in a quadrupedal robot[J]. Robotica, 2008, 26(1): 1-7.
[14] ������, ������, ���, ��. ����������������µ�����������˶�����[J]. ������, 2012, 33(6): 700-705.
ZENG Xiangyu, E Mingcheng, LI Dongdong, et al. Quadruped robot walking control on trench-like noncontinuous terrain[J]. Robot, 2012, 33(6): 700-705.
[15] RIGHETTI L, IJSPEERT A J. Pattern generators with sensory feedback for the control of quadruped locomotion[C]//IEEE International Conference on Robotics and Automation. Pasadena: IEEE Computer Society, 2008: 819-824.
[16] ����, ����ѫ, ����Ȩ. �����з�����˲�̬�滮����[J]. ���������̴�ѧѧ��, 2011, 32(4): 486-491.
WANG Gang, ZHANG Lixun, WANG Liquan. Research on a gait planning method for a crab-like octopod robot[J]. Journal of Harbin Engineering University, 2011, 32(4): 486-491.
[17] ����, ����ѫ, ����Ȩ. ��з�����˽�������λ���β�̬�о�[J]. ������, 2011, 33(2): 237-243.
WANG Gang, ZHANG Lixun, WANG Liquan. On alternating equal-phase wave gait of crab-like robot[J]. Robot, 2011, 33(2): 237-243.
(�༭ ����ƽ)
�ո����ڣ�2015-12-07�������ڣ�2016-02-27
������Ŀ(Foundation item)��������Ȼ��ѧ�����������������Ŀ(51409058)��������ʡ��Ȼ��ѧ����������Ŀ(E2016017)(Project(51409058) supported by the National Natural Science Foundation of China;Project(E2016017) supported by the Natural Science Foundation of Heilongjiang Province of China)
ͨ�����ߣ����գ���ʿ����ʦ������ˮ�»����˼��������ܶ�������������˶������о���E-mail��wanggang@hrbeu.edu.cn
ժҪ��Ϊ����߷�з�����˵ĸ��ӻ�����Ӧ�ԣ����һ�ֻ��������������������Ӧ���ӵ��β�̬���ɷ��������ȣ����û�����Ԫ����������з������CPG�˶���������ģ�ͣ���Σ����þ������ñƽ�������ǰ�������罫CPG����Ľ����ź�ӳ��Ϊ��������˹켣��Ȼ����CPGģ������������������������ķ�����ƣ�ʵ���˻���������Ӧ���ӵ��β�̬���ɣ����ͨ����з�����˸��ӵ����˶����Ƶ�ʵ���о�����֤������Ļ��������������������Ӧ���ӵ��β�̬���ɷ�������Ч�ԡ�
[2] �����. ����CPG�����������������߲�̬�滮�����о�[D]. ������: ��������ҵ��ѧ�����о���Ժ, 2013: 6-8.
[7] ������, ��ΰ, �ں���, ��. ���� CPG �����㲽�л������˶�����ϵͳ�о�[J]. ��е�����, 2010(8): 65-68.
[14] ������, ������, ���, ��. ����������������µ�����������˶�����[J]. ������, 2012, 33(6): 700-705.
[16] ����, ����ѫ, ����Ȩ. �����з�����˲�̬�滮����[J]. ���������̴�ѧѧ��, 2011, 32(4): 486-491.
[17] ����, ����ѫ, ����Ȩ. ��з�����˽�������λ���β�̬�о�[J]. ������, 2011, 33(2): 237-243.
