
��V������ͧ�����������㼰��Ӱ��
�ﺮ��������ׯ�������
(���������̴�ѧ ˮ�����ܻ����˼����ص�ʵ����, ������ ��������150001)
ժ Ҫ��
����ͧ������ˮ�����ļ��㷽�������о�������Hess-Smith����������ά�������������˶��ĸ���������������������֤����ʵ�ʼ����и��ݸ�ͧģ�������õ�����������ǵõ�����ˮ�������״����ֿ��ǻ���ͧ���ٶԸ���������Ӱ�졣��������ͧ6���ɶ��˶����̣��ֱ�ʹ�þ��鹫ʽ��Hess-Smith�����õ���2�鸽������ֵ������ͧ�˶�״̬���з�����㣬���������ʵͧ���Խ�����жԱȡ��ԱȽ����������������������ͧ���˶�״̬��һ��Ӱ�죬�ڼ��㻬��ͧ��������ʱ�����Ǻ���Ӱ��ķ��������ӽӽ���ʵ�����
�ؼ��ʣ�
����ͧ����V�ͻ���ͧ������������Hess-Smith������
��ͼ����ţ�U661.3 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0567-07
Calculation of added mass to deep-V unmanned surface vehicle and its effect
SUN Han-bing, ZOU Jin, ZHUANG Jia-yuan, WU Gong-xing
(State Key Laboratory of Autonomous Under Water Vehicle, Harbin Engineering University, Harbin 150001, China)
Abstract: A computation method for calculating added mass of an unmanned surface vehicle (USV) maneuvering in water was developed using Hess-Smith method, which was verified by the ellipsoid. Based on the results of model tests, the trim angle and the draft were obtained to calculate water entry shape of the USV, so that the influence of speed to added mass was considered. Then the six-degree-of-freedom dynamic equations were established according to theory mechanics, and different parameters of USV motion were achieved with the results of the empirical formula and Hess-Smith method respectively. Finally, the results were compared with the sea-experiments results of USV. The results show that the added mass has a considerable effect on USV motion and the simulation result considering speed effect is more approach to the actual situation, the feasibility of the method is verified.
Key words: unmanned surface vehicle; deep-V planing-hull; added mass; Hess-Smith method
��������һ����������ˮ������ͧ�ܵ��������Ҫǿ���ĸ߶����ӣ��õ��˿��ٷ�չ[1]��Ŀǰ���ж�������ͧӦ���ھ��¡����е�����[2]������ͧ��ָ��ң�ػ�����ģʽ��ˮ�溽�еĺ��������ܹ�ִ��Σ �ա������Լ��������������˴�ִֻ�еľ���������ˮ���鱨�ռ������ӡ����Ⱦ�����;���ɶ�õ�ˮ������[3-4]��Ŀǰ����ͧ�ĵ��ʹ�����Ҫ�У������ġ�SPARTAN���š���ɫ�еġ�Protector���š�������ġ�Charlie����˫����USV[5]��Ӣ���ġ�Springer����˫����USV[6]���������ġ�Delfim����˫����USV�ȡ�
��������ͧҪ��ߺ��٣���ˣ����о��е�����ͧ������V����ͧ����Ϊ����սƽ̨������ͧ�ڸ���Сͧ������������Ҫ��λ����Ҫ��������ʱͧ����������嶯����֧�д�ͧ������[7]������������ͧ�������ԣ�Ҫ�����������������кͰ�ȫ���е��� �����о�������������˶�������Ե���Ϊ��Ҫ��Ŀǰ�����ڹ��ڻ���ͧ�����������о������źܴ�ռ䡣���ǵ�����ͧ���к��ٸߡ���ˮ��С��ˮ�������Ը��ӵ��ص㣬������ˮ�������з��������ܹ�Ϊ����ͧ���˶������ṩ��������ˣ��Ի���ͧ���о�������Ҫ���о����弰ʵ�ü�ֵ��
���������ص��о�������ͧ������ˮ����������������˶�ʱ���������Χ����һ���˶�����ʱ������������������ø�����������ʾ[8]��������֪������������ѧԭ�������Խ����������ܵ������������Խ����������ϵѡ������һ������£�����������������ļ��������йء���������������ѧ֪ʶ���Լ����������Բ������ȵĸ�������������ʵ�ʹ��������������壬��״���Ǽ��� �壬Ŀǰ��Ҫ��������3�ַ����������ά����ĸ��������������㷨����Ƭ���ͱ߽�Ԫ��(�������۷�)[9]�������㷨��ָ������������ѧ������������ȼ�����ĸ����������Ӷ����ƹ���ϸ����ĸ�����������Ȼ�ڼ���ϸ����ʱЧ���ܺã����÷�������һ���ľ����ԣ���Ƭ����ָ���������߷�����ֳɶ�Σ�ÿһС�εĸ�����������ͬ������״�Ķ�Ԫ����ĸ���������ʽ���㣬Ȼ����õĸ��θ������������������õ�������ĸ����������߽�Ԫ��(BEM)�ǽ�������滮�ֵ�Ԫ����ÿһ����Ԫ�ϲ���ǿ�ȴ����Ļ����⣬��Դ���㡢ż���ӵȣ��Ӷ�ȷ�������ٶ��ƣ������õ���������[10]�����нϸߵľ��ȡ����⣬���ż�����ĸ��ٷ�չ������CFD����ֵ�������㴬�� ���������õ��˹㷺��Ӧ��[11-12]��
���о����о�������л���ͧˮ�������ԣ����ź��ٱ仯���亽��״̬����ˮ�Ĵ�����״ҲҪ��֮�仯�����丽����������������״��������������ĺ���������һ���뺽���йصĺ����������������۷������鹫ʽ���м����Ѿ���������ȷ��Ҫ�� ����������ͧ�����������������о���ʮ�ֱ�Ҫ�ģ����о�����Hess-Smith��������������ͧ��������������ʵ�����Խ���Աȣ���֤�����Ŀ����ԡ�
1 ����ѧģ�ͽ���������
1.1 ����ϵ���˶����̵Ľ���
Ϊ�˰Ѹ��ӵ�������������ѧ��ʽ���������о��������»������裺
(1) ���躣���ǹ��Բο�ϵ���������������ϵΪ��������ϵ��
(2) ���Ե������ʣ��Ѻ��濴��ƽ�棻
(3) �������ٶȡ������ܶ��Լ���ˮ�ܶȺ㶨��
(4) ������ͧͧ���Ǹ��壬������Ϊ������
(5) ������ͧͧ������������ԳƵġ�
Ϊ����������ͧ���˶�״̬����������2������ֱ������ϵ��1���ǹ̶�����ϵO-XEYEZE(���¼�ơ���ϵ��)�����ڵ�����棬O������ѡ���Ĺ̶��ڵ�������һ�㣬ͨ����ѡ����ijһʱ��(t=0ʱ)����ͧ����G����λ�ã�OXE���ھ�ˮ���ڣ��䷽��һ��ѡ������ͧ�ܵ��˶������ϣ����Ƿ�����ʱָ�������� ��OYE��ѡ��ΪOXE���ھ�ˮ����˳ʱ����ת90��ķ����ϣ�OZE�ᴹֱ�ھ�ˮ�棬��ָ�����Ϊ��������1�����˶�����ϵG-xyz(��ơ���ϵ��)����������ͧ������һ���˶�����ϵ��ԭ��������G����������Gx��Gy��Gz�ֱ��Ǿ���G����ˮ���桢���������������Ľ��ߡ�����������ϵ�Ĺ涨����Gx���ף�Gy���ң�Gz���£���ͼ1��

ͼ1 ����ͧ�Ķ�ϵ����ϵ
Fig.1 Earth-fixed and body-fixed coordinate system of USV
����ϵ����֮����ŷ�����̼������˶��� ��������������˶��Ķ����ض��������Ƶ�������ͧ6���ɶȲ����˶�ģ�ͣ���
 (1)
(1)
ʽ�У�u��v��w�ֱ�Ϊ����ͧ���Ĵ����ٶ�V��G- xyz����x��y��z�����ϵ�ͶӰ��p��q��r�ֱ�Ϊ���ٶ�W��x��y��z�����ϵ�ͶӰ��X��Y��Z�ֱ�Ϊ��F��x��y��z�����ϵ�ͶӰ��L��M��N�ֱ�Ϊ����H��x��y��z�����ϵ�ͶӰ��![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() �Ǹ���Ӧ�����ļ��ٶȡ�
�Ǹ���Ӧ�����ļ��ٶȡ�
1.2 ����ͧ��������
����ͧ��һ����ˮʽ������Ⱦ��кܴ�IJ�ͬ�����˶�״̬���������������ɷ�Ϊ[13]��
(1) ��ˮ����״̬(![]() ��1.0)���ڴ˽Σ�ͧ�ش��ɸ���֧�֣���ͧ����������������ͨ����ˮ�ʹ�ֻ��ͬ��
��1.0)���ڴ˽Σ�ͧ�ش��ɸ���֧�֣���ͧ����������������ͨ����ˮ�ʹ�ֻ��ͬ��
(2) ���ɺ���״̬(1.0��![]() ��3.0)��ͧ�������徲�����Ͷ�����֧�֣����ź������ߣ����������ӣ����������١�
��3.0)��ͧ�������徲�����Ͷ�����֧�֣����ź������ߣ����������ӣ����������١�
(3) ����״̬(![]() ��3.0)��ͧ�ؼ�����ȫ�����嶯����֧�֡�
��3.0)��ͧ�ؼ�����ȫ�����嶯����֧�֡�
���ڻ���ͧ������3��������ȫ��ͬ�ĺ���״̬�����о������������෨����������ͧ�ں��й������ܵ��ĸ����������أ�������ͧ��������Ϊ������������ˮ�������������Դ�����������ͧ�ܵ��ĸ�����(��)���ȼ���˵���ʱռ�ֵľ�ˮ�����ֿ����˸���ʱ�������Ի���ͧ��Ӱ�졣
�����ص����������ͧ�Ĺ�����ˮ������������ˮ������ָ������������ƽ��ˮ�����������˶�ʱ�ɹ��������ˮ��������������ѧԭ����֪���������ޱ���������������ʱ�������Ŷ��˶��Ķ���Ϊ��
![]()
![]() (2)
(2)
���У�v1=u��v2=v��v3=w��v4=p��v5=q��v6=r������ij�����һ��6��6�ľ�������ĸ��������ǹ���ģ����в�ͬ����Ρ���i, j=1, 2, 3ʱ����ij����������������i, j=4, 5, 6ʱ����ij�����������Ծص����١�
��ʽ(2)չ���õ���
 (3)
(3)
�������Ŷ��˶��Ķ����붯�������¹�ϵ��
![]()
![]() (4)
(4)
�洬�˶�����ϵ�̶�����ϵ֮�䶯���Ͷ����ص�ת����ϵ���£�
 (5)
(5)
�������ܹ�����ˮ����FI������MIΪ��
 (6)
(6)
��ʽ(3)����ʽ(4)�У��ɵö�������ʽ�����估ʽ(5)һ�����ʽ(6)���ɵõ�6���ɶ��˶�ʱ�������ڴ���Ĺ�����ˮ�������ڴ˻�����д���йص�ͶӰʽ�����ݻ���ͧͧ�͵�������(ͧ����״�Ƚϱ�ƽ)��������������Ĺ������Զ�����м���Ϊ����������ϵ������Խ����ϵ�ϵ������������ȡ0ֵ���õ���
 (7)
(7)
�ɼ���ȷ��������ˮ��������Ҫ������ȷ����ʽ�е�6����������������11����22����33����44����55�ͦ�66��
2 ������������
2.1 Hess-Smith����
20����60�����������Hess��Smith��չ��1�ּ���������ά���������ķ���[14]����һ������ΪHess-Smith����������ָ������ƽ���ı��α��浥Ԫ(��Ƭ)���Ʊ�ʾ���棬ÿ����Ԫ�ϲ���һ��ǿ��δ֪��Դ��Ȼ������������ijЩ����������㷨���ٶ�Ϊ�������߽��������õ���ԪԴ�ܶȵ����Դ��������飬��ⷽ����õ�Դ�ܶȷֲ������������������������ٶȡ�ѹ����������������Ʒ���(������˹����)Ϊ��
![]() (8)
(8)
�߽�����Ϊ��
![]() ���������� (9)
���������� (9)
![]() ������Զ�� (10)
������Զ�� (10)
���У�![]() Ϊ�Ŷ��ٶ��ƣ�nΪ�����ϱ��浥λ����ʸ����VΪ����ͧ���˶��ٶȡ�
Ϊ�Ŷ��ٶ��ƣ�nΪ�����ϱ��浥λ����ʸ����VΪ����ͧ���˶��ٶȡ�
�ɻ���������ѧ֪ʶ��֪������������Ϊ��
![]()
![]() (11)
(11)
�ɸ�����������ʽ���Կ��������㸽�������Ĺؼ����Ǽ����ƺ�����Ϊ�˼��㸴����״�������������о����ø��������ھ������ֵ�������У�Ӧ��Hess-Smith����������ά������������������������߽��������Ա�ʾΪ��
![]() (12)
(12)
���У�nx��ny��nz�ֱ�Ϊ��������ĵ�λ�ⷨ��ʸ��n����������ϵ����x��y��z�����ϵ�3��������x��y��z�ֱ�Ϊ��������һ�㴦��ʸ��r��3��������
������������ԭ������ϣ�������ٶ��ƺ������ô����˶��ٶȡ����ٶȼ���λ�ٶ��ƺ�����ʾΪ��
![]()
![]() (13)
(13)
����![]() ��
��![]() ��
��![]() �ֱ��ʾx��y��z����ƽ���˶��ĵ�λ�ٶ��ƺ�����
�ֱ��ʾx��y��z����ƽ���˶��ĵ�λ�ٶ��ƺ�����![]() ��
��![]() ��
��![]() �ֱ��ʾx��y��z������ת�˶��ĵ�λ�ٶ��ƺ�����
�ֱ��ʾx��y��z������ת�˶��ĵ�λ�ٶ��ƺ�����
��ʽ(12)����ʽ(11)�У����ǵ�u��v��w��p��q��r�������ԣ����Եõ���
 (14)
(14)
�贬�����汻���ֳ�![]() ���ı��ε�Ԫ����
���ı��ε�Ԫ����
![]()
![]() (15)
(15)
ʽ�У�![]() Ϊ�������е�i������ʱ�������k����Ԫ�ϵ��ٶ��ƣ�
Ϊ�������е�i������ʱ�������k����Ԫ�ϵ��ٶ��ƣ�![]() Ϊ��ͧ���е�j������ʱ�������k����Ԫ�ϵķ�����٣�SkΪ��k����Ԫ�������
Ϊ��ͧ���е�j������ʱ�������k����Ԫ�ϵķ�����٣�SkΪ��k����Ԫ�������
�����ʽ���ɵõ���������������ֵ������� Ϊ������������⡪ȷ�����ַ��̡���ֵ��ɢ����Ԫƽ�滯��Ӱ��ϵ�����㡪���Ƴ�������ƺ����ͱ����ٶȣ����������������ֵ�⡣���о��е�Hess-Smith����ʵ�ֹ������£����ȣ�ѡ��Solid Edge�����Խṹ����н�ģ��Ȼ����ASC���ʽ����м��ļ���Ȼ��ʹ��GAMBIT�����Խṹ����н�ģ��������ɢ����ȡ���ɵ��������ļ����д����������ʺϼ������Ԫ�����ʽ�ļ��������GENERICΪ�������*.neu�����ļ���������Ϊ��Ϊ����Ӱ�����IJ�����������Ҫ��һ�������о����ýṹ����������ͧʪ����������֣���Բ�ͬ���ʵı����ѡ���ʵ��ĵ�Ԫ���ͺ����з�ʽ���������C���Ա��Ƴ���ʵ��ֱ�Ӷ�ȡ�ڵ���Ϣ�͵�Ԫ��Ϣ�еĵ�Ԫ��źͽڵ�����������Ԫ�����ʽ�����Hess- Smith��ʶ���dat��ʽ�ı��ļ�������Hess-Smith�������Ƴ��������ά����ĸ���������
2.2 ��������
���ȼ�������һ������(2a=20 m��2b=2c=5.33 m��![]() =1.225 kg/m3)�ĸ������������о�ֱ�Ӹ�����������������������ֵ[15]�����˱Ƚ�(����1)�����Կ���������������ֵ�Ǻϵúܺã���ii(i=1,������, 4)���������Ϊ6.52%����55�ͦ�66�У���С�������Ϊ0.44%���������о����ڼ��㸽�������ķ�������ȷ�ģ������ǿɿ��ġ��ɼ��������Կ�����Hess-Smith��������Ľ��������ľ�ϸ������������ʵ����Ϊ5 000�������ȫ�ܹ����㾫��Ҫ��
=1.225 kg/m3)�ĸ������������о�ֱ�Ӹ�����������������������ֵ[15]�����˱Ƚ�(����1)�����Կ���������������ֵ�Ǻϵúܺã���ii(i=1,������, 4)���������Ϊ6.52%����55�ͦ�66�У���С�������Ϊ0.44%���������о����ڼ��㸽�������ķ�������ȷ�ģ������ǿɿ��ġ��ɼ��������Կ�����Hess-Smith��������Ľ��������ľ�ϸ������������ʵ����Ϊ5 000�������ȫ�ܹ����㾫��Ҫ��
��1 �����帽����������Ƚ�
Table 1 Comparative results of ellipsoid added mass

2.3 ���鹫ʽ��������ͧ��������
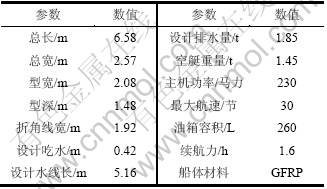
��������[15]�еľ��鹫ʽ����ij������ͧ�ĸ���������ʵ�����߶����±�2��ʾ������������3��
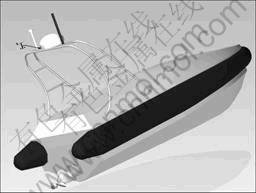
ͼ2 ����ͧ��ά��ģ
Fig.2 Three-dimensional model of USV
��2 ʵ�����߶�
Table 2 Main parameters of USV
��3 ���鹫ʽ������
Table 3 Results of empirical formula

2.4 Hess-Smith����������ͧ��������
��![]() ��3.0ʱ�������ڻ���״̬�������ٶȴ���10 m/sʱ��������ͧ��ʼ���С�����������߱�Ϊ2.5��ģ�����飬���������������ҷ�������˴�ģ����������������ǵȲ�������ģ��ͼ3�������������õ�ⷨ����������Dz�����Ǵ������������������������Dz�����á�����Ǽ�������״̬��������Ϊʵ�������4��ʾ��
��3.0ʱ�������ڻ���״̬�������ٶȴ���10 m/sʱ��������ͧ��ʼ���С�����������߱�Ϊ2.5��ģ�����飬���������������ҷ�������˴�ģ����������������ǵȲ�������ģ��ͼ3�������������õ�ⷨ����������Dz�����Ǵ������������������������Dz�����á�����Ǽ�������״̬��������Ϊʵ�������4��ʾ��

ͼ3 ����ͧģ��ͼƬ
Fig.3 Picture of the USV
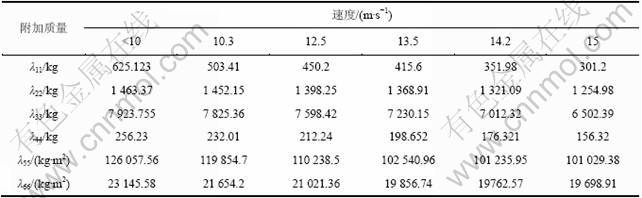
����Gambit�������������嵥Ԫ��(�������ּ�ͼ4��ͼ5)���������Ԫ���꣬�ڵ���Ϣ��Ϊ4�У����е�1��Ϊ�ڵ��ţ���3��Ϊ�ڵ����ꡣ��Ԫ��Ϣ���յ�Ԫ���ͷ�Ϊ6��(�����ε�Ԫ)��7��(�ı��ε�Ԫ)����1��Ϊ��Ԫ��ţ���2�͵�3��Ϊ��Ԫ��ʽ˵��������Ϊ�ڵ���ŵ����С�Ȼ����Hess-Smith����̼��㴬���ٶ��Ƽ����������������������Ϣ����C���Ա��Ƴ������¶�ȡ����Ԫ��ϢΪ�ڵ�����㣬��12�С���ͧ��ˮ���ǣ��ܶ�![]() = 1 025.22 kg/m3����ͧ����ˮ�������5��ʾ������������6��
= 1 025.22 kg/m3����ͧ����ˮ�������5��ʾ������������6��
��4 ����ͧ��������Ǽ�����
Table 4 Trim angle and draft of USV


ͼ4 ����ʱ������ˮ��״������
Fig.4 Water entry shape and grid of USV at slow speed

ͼ5 ����ʱ������ˮ��״������
Fig.5 Water entry shape and grid of USV at high speed
��5 ͧ����ˮ����
Table 5 Water entry parameters of USV

��6 Hess-Smith����������
Table 6 Results of Hess-Smith method
3 ����ʵ�鼰�Աȷ���
����ͧ����ʵͧ�����������˳�硢���2�Σ�����������������ͬһ���ߣ�������ֹ��ҲӦ��������һ�¡�����ʱ�����ֲ��䡣����ʹ��GPS���в�������ͧ�����ߵ絥Ԫ���������ߵ絥Ԫ�������ݣ�����ʵʱ��ؼ�¼��������ͧ����ͼƬ��ͼ6��ʾ��
ͼ6 ����ͧʵ������ͼƬ
Fig.6 Sea-experiment picture of USV
���������е�6���ɶȷ��̣�����4����������-����(Rung-Kutta)��������ֵ��⣬�Ӷ��������ͧ����ʱ�̵ļ��ٶȡ�Ȼ�Լ��ٶȽ�����ֵ���֣��������ʱ�̵�λ�ú��ٶȣ�����Ԥ�����˶�״̬����������������һ�£���������(������3 000 r/min)������£��ֱ����2�ֲ�ͬ������������µ�����ͧ���ٹ��̣���¼״̬����u��ʱ����ĵı仯��ÿ0.5���¼1�������Ա�֤��ʵͧ����������ͬ���ġ������ȽϽ����ͼ7��
ͨ��ͼ7��3�ּ��ٹ��̵ĶԱȿ��Կ������ڲ�ͬ�ĸ�����������£��õ���״̬������һ������������������ͧ���˶�״̬��һ��Ӱ�졣���Dz�ͬ�����µĺ���״̬�DZ�Ҫ�ģ�����������ӽӽ���ʵ�����
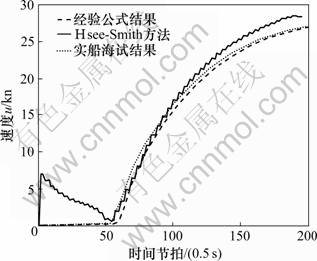
ͼ7 ������������Ա�
Fig.7 Comparison of accelerated motion of USV
4 ����
(1) ͨ��Hess-Smith������д����ά�����������еĸ��������������ɿ���
(2) ��������������ͧ���˶�״̬��һ��Ӱ�죬�����ǻ���ͧ�ĸ����������㡣���Dz�ͬ����ʱ��ˮ��״�����仯�DZ�Ҫ�ģ������Ͼ��鹫ʽ���ӽ���ʵ�����
(3) ���ں���ʵ��������Ӷ�䣬��������Ӱ���Dz��ɱ���ģ��ڽ��з���ʱ��������Щ���������ܵ�������ʵ������֮������ƫ�
(4) ͨ��Hess-Smith�������㻬��ͧ��������ʱ��������ˮ�ϲ��ֲ����ĸ���������Ҳ����ʹ�ü���ֵ������һЩ��
�ο����ף�
[1] US Department of the Navy. The Navy Unmanned Surface Vehicle (USV) Master Plan[R]. Washington D C: US Department of the Navy, 2007.
[2] ������, ������, ������. ����ռ���������������������չչ��[J]. �й������о�, 2006, 1(3): 2-4.
XU Yu-ru, SU Yu-min, PANG Yong-jie. Expectation of the development in the technology on ocean space intelligent unmanned vehicles[J]. Chinese Journal of Ship Research, 2006, 1(3): 2-4.
[3] MANLEY J E. Autonomous surface vessels, 15 years of development[C]//Proceedings of the Oceans 2008 MTS/IEEE Quebec Conference and Exhibition. Quebec, 2008: 1-4.
[4] VEERS J, BERTRAM V. Development of the ASV multi- mission surface vehicle III[C]//Proceedings of 5th Int Conf Computer and IT Application in the Maritime Industries. COMPIT. Delft, 2006: 345-355.
[5] Caccia M, Bibuli M, Bono R, et al. Basic navigation, guidance and control of an unmanned surface vehicle[J]. Autonomous Robots, 2008, 25: 349-365.
[6] Xu T, Chudey J, Sutton R. Soft computing design of a multisensory data fusion system for unmanned surface vehicle navigation[C]//Proceedings of 7th IFAC Conference Maneuvering Control of Marine Craft. Lisbon, 2006: 124-156.
[7] Faltinsen O M. Hydrodynamics of high-speed marine vehicles [M]. New York: Cambridge University Press, 2005: 342-385.
[8] ����, ��ѩ��. ��ֵ���㸴���������帽���������·���[J]. ���������, 2007, 24(5): 75-78.
MA Ye, SHAN Xue-xiong. A new numerical computation method for added masses of complicated object[J]. Computer Simulation, 2007, 24(5): 75-78.
[9] ��ά��, �ֽ���. ϸ����ת�帽����������ֵ����[J]. ˮ����ѧ�о����չ, 1986, 1(2): 70-81.
XU Wei-de, LIN Jian-guo. Numerical calculation of added masses of slender bodies of revolution[J]. Journal of Hydrodynamics, 1986, 1(2): 70-81.
[10] ����һ. ������ѧ[M]. ����: ������ѧ������, 2000: 154-166.
WU Wang-yi. Fluid Mechanics[M]. Beijing: Peking University Press, 2000: 154-166.
[11] ���ʴ�, ����ǿ, �ѹ�ƽ, ��. һ�ֻ���CFD ���۴�����������������ļ��㷽��[J]. �Ϻ���ͨ��ѧѧ��, 2009, 43(2): 198-203.
ZHU Ren-chuan, GUO Hai-qiang, MIAO Guo-ping, et al. A computational method for evaluation of added mass and damping of ship based on CFD theory[J]. Journal of Shanghai Jiaotong University, 2009, 43(2): 198-203.
[12] Chang H X, Miao G P, Liu Y Z. Numerical simulation of viscous flow around a rolling cylinder with ship like section[J]. China Ocean Engineering, 1995, 9 (1): 9-18.
[13] ������, ���Ʋ�. ����ͧ����ѧ[M]. �Ϻ�: �Ϻ���ͨ��ѧ������, 1990: 1-5.
SHAO Shi-ming, WANG Yun-cai. Hydrodynamics of high-speed vehicles[M]. Shanghai: Shanghai Jiaotong University Press, 1990: 1-5.
[14] Hess J L, Smith A M O. Calculation of potential flow about arbitrary bodies[J]. Progress in Aeronautical Science, 1967, (8): 1-133.
[15] ��С��, ½����. ����ͧ������[J]. ���⽢������, 1998, 231: 11-18.
WANG Xiao-ning, LU Wen-li. Dynamic stability of planning vessels[J]. Ship Engineering Abroad, 1998, 231: 11-18.
(�༭ ���˱�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ��ˮ�����ܻ����˼��������Ƽ��ص�ʵ���ҿ��ſ����о�����������Ŀ(2008003)��������Ȼ��ѧ����������Ŀ(61004008)
ͨ�����ߣ��ﺮ��(1985-)��Ů���������峣�ˣ���ʿ�о�������������ˮ��ͧ��ˮ�������㼰�����˶������о����绰��13796629437��E-mail: sun-han-bing@163.com
ժҪ�����ij��Vͧ������ͧ������ˮ�����ļ��㷽�������о�������Hess-Smith����������ά�������������˶��ĸ���������������������֤����ʵ�ʼ����и��ݸ�ͧģ�������õ�����������ǵõ�����ˮ�������״����ֿ��ǻ���ͧ���ٶԸ���������Ӱ�졣��������ͧ6���ɶ��˶����̣��ֱ�ʹ�þ��鹫ʽ��Hess-Smith�����õ���2�鸽������ֵ������ͧ�˶�״̬���з�����㣬���������ʵͧ���Խ�����жԱȡ��ԱȽ����������������������ͧ���˶�״̬��һ��Ӱ�죬�ڼ��㻬��ͧ��������ʱ�����Ǻ���Ӱ��ķ��������ӽӽ���ʵ�����
