
DOI: 10.11817/j.issn.1672-7207.2016.05.012
��϶����ھ����ת�ƶ���������ϵͳ��ģ�������о�
����ʢ1�����廪1, 2������1��������1��������2
(1. ���ϴ�ѧ �����ܸ�����������ص�ʵ���ң����� ��ɳ��410083��
2. ɽ������װ���ɷ�����˾ �������ģ����� ��ɳ��410100)
ժ Ҫ��
�����ת�ε��ƶ����������ھ��������ҵ�������ܺĽ��з��������һ����Һѹ����+���Ϊ���շ�ʽ����������Ϊ����Ԫ���Ļ�ת�ƶ��������շ�����������ת�ƶ���������ϵͳ�з��������������������������ݵȹؼ�Ԫ����ѧģ�ͣ��ڶԻ�ת�˶�״̬ȷ������������ģʽ�л������յ������������ƺͳ�������SOC�жϵĻ����ϣ�������������ϵͳ�ķ���ģ�ͣ����ھ��ʵ���غ���Ϊ�����ϵͳ��������Ч�����з����������ھ����ת�ƶ���������ϵͳ����ƽ̨���Ը�����ϵͳ����������Ч���ͻ�ת�������ܽ��������о����о�������������������շ������У��ڲ�Ӱ���ھ����ת�������ܵ�ͬʱ��ƽ̨��ת�ƶ���������Ч�ʿɴﵽ40%���ϡ�
�ؼ��ʣ�
��϶����ھ������ת�ƶ��������������������������ƽ̨��
��ͼ����ţ�TH39 ���ױ�־�룺A ���±�ţ�1672-7207(2016)05-1533-10
Modeling and experimental research on rotary braking energy recovery system of hybrid excavator
LIU Changsheng1, HE Qinghua1, 2, GONG Jun1, ZHAO Yuming1, LI Saibai2
(1. State Key Laboratory of High Performance Complicated, Central South University, Changsha 410083, China;
2. R&D Center, Sunward Intelligent Equipment Co. Ltd, Changsha 410100, China)
Abstract: In order to recover the braking energy from the hydraulic excavator during rotary phase, the typical working condition and energy losses were analyzed, and a rotary braking energy recovery program for hybrid excavator was proposed based on hydraulic motor and electric motor as recovery method and capacitor as energy storage element. The mathematical model of key components such as engine, electric motor, hydraulic motor and capacitor was established. For the rotary braking energy recovery system, the simulation model was established based on rotary motion state recognition and energy recovery mode switching, electric motor torque output control and capacitor SOC judgment, and the effect of energy recovery system was analyzed by simulation based on the actual load spectrum of hydraulic excavator as input signal. At last the recovery effect and rotary drive performance was studied by building test platform of rotary braking energy recovery system. The results show that not only the recovery program is feasible, but the rotary braking energy recovery efficiency can reach above 40% without affecting rotary driving performance of the excavator.
Key words: hybrid excavator; rotary braking; energy recovery; simulation analysis; test platform
����������϶����ھ�����о��ѳ�Ϊ���̻�е��ҵ�ڽ��ܼ����о��Ľ��㡣��2004���ձ�С�ɹ�˾���Ƴ������ϵ�һ̨��϶����ھ�������������ھ��������ҵ����֡����������Լ�ɽ�����ܵ�Ҳ�����˻�϶����ھ������[1-3]����϶����������ھ���ϵijɹ�Ӧ�ã�Ϊ�ھ�����������ս��ܼ����о��ṩ���µ�˼·���������϶����ھ�������ò���ʽ����ϵͳ����ƽ�ⷢ�����������غ�ִ�л�����������Ϊ��Ҫ����[4-5]��Ŀǰ��϶����ھ������������Ҫ�����ڶ����½�����[6-7]����ƽ̨��ת�ƶ����������о����࣬���������Ƚϵ��͵��о�������2�֣�һ���DZ�Ƶ������Һѹ����ֱ������ƽ̨����ת�ƶ�����ͨ�����ת��Ϊ���ܴ����ڵ索��Ԫ��[8-10]��ϵͳ����ת�������������չ��ܼ�����һ����Ȼ��������Ч�ʵ�����ߵ�ȴ������ϵͳ�Ŀɿ��ԡ���һ���ǻ���Һѹ�������Ļ�ת�ƶ��������շ���[11-12]�������������ͷ�ѹ���͵����ó��ڸ�����������ʱ����������ѹ�����ڸ���ѹ����ѹ���ͽ������ͷţ������յ������ò��������õ�ͬʱӰ����һ�ε��������ա������������ͷ�ѹ����ʱ��̣�ʹ��ִ�л����ٶȲ��ɿأ���ͨ�����ڵ��ٷ��Ŀ������ʵ��ִ�л�������������ϵͳ����һ���Ľ�����ʧ����������������Ч�ʲ��ߡ������������һ�ֻ�϶����ھ���ϳ�ƽ̨��ת�ƶ��������շ������ڶԻ�ת�˶�״̬ȷ������������ģʽ�л������յ������������ƺͳ�������SOC�жϵĻ����ϣ�������������ϵͳ�ķ���ģ�Ͳ����з����������ھ����ת�ƶ���������ϵͳ����ƽ̨����ϵͳ����������Ч���ͻ�ת�������ܽ�����֤��
1 ��ת�ƶ���������ϵͳ�ṹ��ԭ��
1.1 �ھ����������
Һѹ�ھ���ĵ�����ҵģʽ��ҪΪ�ھ�������ҵ������DZ�����������ھ���ҵ����Ϊ���ݡ���ɽ�����ܹ�˾7 t��Һѹ�ھ��Ϊ�о������ڷ�����ʵ�ز������ݵĻ����ϣ��ɵõ�Һѹ�ھ���ڵ�����ҵ����ѭ���µĹ��ʡ�ͼ1��ʾΪ�ھ���ĵ�����ҵѭ�����ڵ����ھ���ҵ�����ڣ�Һѹ�ھ���Ⱥ�����ھ����ؾ�����ת��ж�غͿ��ط���4���Ρ�
1.2 �ھ���ܺķ���
Һѹ�ھ�����ھ���ҵ�����£�����������ͨ��Һѹ����Ҫ������������װ��(���ۡ����ˡ�����)�����ھ��������Լ������ϳ�ƽ̨��ת���˹������ھ��Ϊ�����ھ������߶�����ִ��Ԫ���������ﲻ�����������ġ�
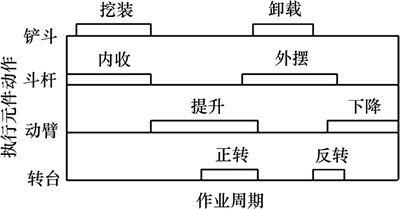
ͼ1 Һѹ�ھ���ĵ�����ҵѭ��
Fig. 1 Typical work cycle of hydraulic excavator
Һѹ�ھ���ھ���ҵ�����������ʺ�����Ϊ��
![]() (1)
(1)
![]() (2)
(2)
ʽ�У�![]() ��
��![]() ��
��![]() �ֱ�Ϊ���ۡ����˺Ͳ������������ʣ�
�ֱ�Ϊ���ۡ����˺Ͳ������������ʣ�![]() Ϊ��ת�����������ʣ�
Ϊ��ת�����������ʣ�![]() Ϊ�����������ʡ�
Ϊ�����������ʡ�
Һѹ��ִ��Ԫ�����ھ���ҵ�����µ��������ʺ������ֱ�Ϊ��
![]() (3)
(3)
![]() (4)
(4)
ʽ�У�![]() Ϊ��ִ��Ԫ��������ѹ����
Ϊ��ִ��Ԫ��������ѹ����![]() Ϊ��ִ��Ԫ��������������
Ϊ��ִ��Ԫ��������������
ͼ2��ʾΪ�ھ�����ھ���ҵ������ʵ�ʲ�õ�һ�������ڱ����������ѹ���������仯���ߣ�ͼ3��ʾΪ��ת�������ϳ�ƽ̨��������˳��ʱ���ת90��ij���ѹ�����ߡ�Ϊ�˱��ڷ����ͱȽϣ�ѡȡҺѹ�õ����������Ϊ��ֵ���������Ͽɼ���õ�����Ԫ������ĵ����ֵ����ɽ������7 t��Һѹ�ھ�������ܲ�����ʵ����������Ϊ����������õ��ھ���ڵ����ھ���ҵѭ���и�Һѹִ��Ԫ����������ıȣ���ͼ4��ʾ��
��ͼ4��֪����ת�����ܺ���Һѹ�ھ�������ھ���ҵѭ�����ܺ�����ռ�����ϴﵽ��38%����˿ɽ���תϵͳ��ΪҺѹ�ھ�����ܵ���Ҫ�о�������һ���棬��������ʵ�ʹ����й�����仯��Χ�����ң�Զ����Ѹ�Ч����������ɹ���Ч�ʵ��£����������ʲ��ߣ�����ͨ����ת�ƶ����������������о�ʵ�ַ������븺�صĹ���ƥ����ھ�����ܾ�����Ҫ���塣
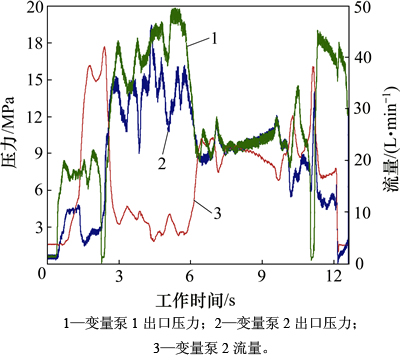
ͼ2 �����������ѹ������������
Fig. 2 Outlet pressure and flow curve of variable pumps
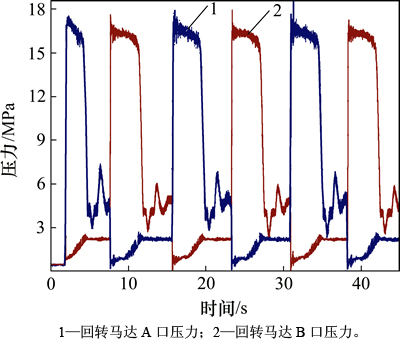
ͼ3 ��ת�������ѹ������
Fig. 3 Outlet pressure curve of rotary motor
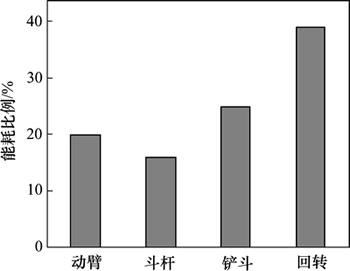
ͼ4 �ھ��������ҵѭ����ִ��Ԫ���ܺı�
Fig. 4 Energy ratio of excavator actuators in typical work cycle
1.3 ��ת�ƶ��������շ���
����ǰ�ķ�����Ƶ�����ϳ�ƽ̨��ת���ھ���ھ���ҵ�����д����Ŵ����Ŀɻ�����������Щ������ԭҺѹϵͳ�ж�ת��Ϊ�����˷���ƽ�ⷧ���ڡ�
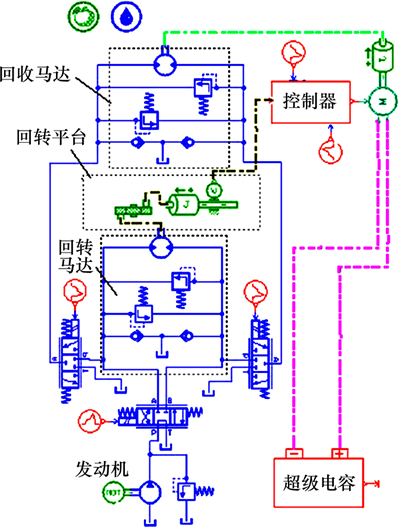
�������ھ��ԭҺѹ����ϵͳ�Ļ�����������Һѹ������������������������������ݹ��ɵ���������ϵͳ������Һѹ��������+�����+�索��Ԫ�����������շ�ʽ��ѡ������ͬ�������Ϊ�綯/�����������������Ϊ����Ԫ������Ƶõ���϶����ھ����ת�ƶ���������ϵͳ�ṹ������ͼ5��ʾ��
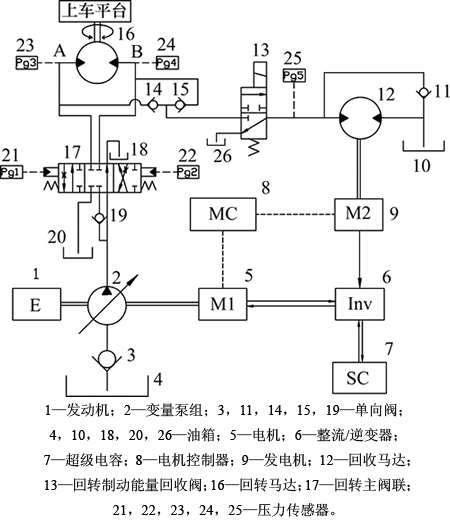
ͼ5 ��ת�ƶ���������ϵͳԭ��ͼ
Fig. 5 Principle of rotary braking energy recovery system
1.4 ��ת�ƶ���������ϵͳ����ԭ������
�������߲�����ת�����ֱ�ʹ�ϳ�ƽ̨˳ʱ��ת��ʱ������17���ƣ���������2�����Һѹ�;�����17��λ�����ת����16��B�ڣ���ʱ�ϳ�ƽ̨���ڼ��ٽΣ���ת�ƶ��������շ�13������λ������ϵͳ�������ã���תҺѹ��·�봫ͳ�ھ����ͬ���������߲�����ת�����ֱ�����λʱ����17������λ���ϳ�ƽ̨�����ƶ����ٽΣ�������ͨ���ɼ��ֱ��ȵ�ѹ����������ѹ�������жϣ�ʹ��ת�ƶ��������շ�13������λ�����ϳ���תƽ̨�����˶�������ԭ��ת���������ת����ת����16��ʱ�����ڱ�ģʽ�����ų���ѹ����һС���־������ڵ��������������������Ҫ���־���13�ڻ�������12��ڴ�����ѹ�����ƶ���������12����������ķ����9��ת�������9�����������ķ�����ͨ������/�����6���볬������7�У�������ͨ��������Pg5�ź��Լ��������ת���ź��ۺ��жϲ�����������������ƶ�Ť������Ե��ڷ����-����ת�ٶ�����ϵͳ��ѹ��ʵ�ֻ�ת����16���ڵ�ѹ�����ڣ��Ӷ��ﵽ��ת��������ƶ���Ŀ�ģ������Һѹ�ھ���ϳ�ƽ̨�����ƶ���ָ��λ�õ�ͬʱ��ʵ����ƽ̨��ת�ƶ����ܵ��������ա�
2 ��ת�ƶ���������ϵͳ��ģ
�ھ����ת�ƶ���������ϵͳ��Ҫ�ǶԷ����������������ת�����������������ݵȽ��н�ģ��Ϊ���ģ�;��ȣ��ڶԸ�Ԫ����ѧ��ģ�����ϣ��������۹�ʽ�;��鹫ʽ���ϵķ�ʽ�����������ܲ�����
2.1 ������ģ��
�ɷ�����������������̨�����������������߽�����ֵģ�ͣ��������ת�غ�ת�ٲ�ѯ�����������ߵõ���ǰ�ܺ��ʡ���������̬���ת��Ϊ
![]() (5)
(5)
ʽ�У�Te��Me��Je��Ce�ͦ�e�ֱ�Ϊ�������������ת�ء����������ת�ء���������Чת���������������ϵ���ͷ��������ٶȡ�
2.2 ��ת����ͻ�������ģ��
��ת���������ƽ�ⷽ�̣�
![]() (6)
(6)
�������������ƽ�ⷽ�̣�
![]() (7)
(7)
ʽ�У�p1Ϊ��ת�����ƶ��ڵ�ѹ����MPa��V1��V2�ֱ�Ϊ��ת�����������������L/r��J1Ϊ�ϳ�ƽ̨��Ч����ת�����ϵ�ת��������J2Ϊ��������-�����Ч�����������ϵ�ת��������kg��m2��![]() ��
��![]() �ֱ�Ϊ��ת����������Ľ��ٶȣ�rad/s��bm1��bm2�ֱ�Ϊ��ת������������������ϵ����N��s/m��Tf1Ϊ�ϳ�ƽ̨��Ч����ת�����ϵ�Ħ�����أ�Tf2Ϊ��������-�����Ч�����������ϵ�Ħ�����أ�TNΪ��������ת�أ�N��m��
�ֱ�Ϊ��ת����������Ľ��ٶȣ�rad/s��bm1��bm2�ֱ�Ϊ��ת������������������ϵ����N��s/m��Tf1Ϊ�ϳ�ƽ̨��Ч����ת�����ϵ�Ħ�����أ�Tf2Ϊ��������-�����Ч�����������ϵ�Ħ�����أ�TNΪ��������ת�أ�N��m��
2.3 ���ģ��
���������������ϵͳ�����������ﴫ�ݶ������ϳ�ƽ̨�ƶ���ת��Ϊ���ܵ�Ԫ��������ѡ������ͬ����������Ч��������ת��T��ת��n�Ĺ�ϵ������ʽ��ʾ��
![]() (8)
(8)
�������ƽ�ⷽ��Ϊ
![]() (9)
(9)
ʽ�У�Tm��TL�ֱ�Ϊ������ת�غ���ת�أ�JΪ���ת�Ӽ����ع�����![]() Ϊ�����е���ٶȣ�BΪ���Ħ��������
Ϊ�����е���ٶȣ�BΪ���Ħ��������
2.4 ��������ģ��
�������ݵĵ�ֵģ����ͼ6��ʾ����������ѧ��ϵ[13]��
![]() (10)
(10)
�������ݵĶ˵�ѹΪ
![]() (11)
(11)
ͨ���������ݳ����ijһȷ����ѹֵ������������ɵ�֪�䴢�������������
![]() (12)
(12)

ͼ6 �������ݵ�ֵ��·
Fig. 6 Equivalent circuit of super-capacitor
ʽ�У�CΪ�������ݵĵ��ݣ�RLΪ��Ե���ϵ�©���裻RsΪ�������裻VcΪ�������ݵ�λ��VtΪ�������ݶ˵�ѹ��IΪ��ŵ������
3 ���Ʋ���
ϵͳ���Ʋ������ƶ�״̬�жϺ��������չ������ص㣬�봫ͳҺѹ�ھ���Ļ�ת����ϵͳ��ȣ���ת�ƶ���������ϵͳ�迼�ǣ����ݳ�������SOC״̬�ж�ϵͳ�Ƿ�ת�ƶ���������ϵͳ����ԭ��תҺѹϵͳ���ɼ��ֱ��ȵ�ѹ���������źźͻ��յ��ת���жϻ�ת�˶�״̬���������ƻ�ת�ƶ��������շ�ͨ�Ϻͻ��յ��ת�ؿ����źţ��������������ת�ؿ����źţ����ڻ��յ�������������С�ͷ���ʹ���յ�������Ӧת�ء�ϵͳ���ƿ�ͼ��ͼ7��
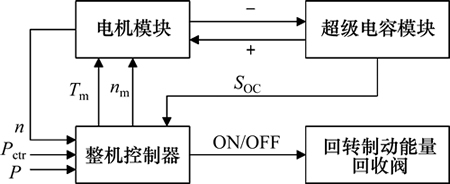
ͼ7 ��ת�ƶ���������ϵͳ���Ʋ��Կ�ͼ
Fig. 7 Control algorithm diagram of rotary braking energy recovery system
3.1 ��ת�˶�״̬ȷ�Ϻ�ϵͳ����ģʽ�л�
ƽ̨��ת������Ҫ��Ϊ���١����ټ������ƶ�3���Ρ�����ǰ����������������ƵĻ�ת�ƶ���������ϵͳ�����ϳ�ƽ̨��ת�ƶ�ʱ�����������գ����Ϊ�˲�Ӱ��������ת�˶����ܣ�����ȷ�ϻ�ת�˶�״̬�Ļ����ϣ�ͨ�����������Ƶ�Ż���ͨ�ϲ�ʹ��������+���������ת�ƶ����أ���ʵ�ֻ�ת�����������ա�����ƽ̨�ƶ�����ʱ���Ͽ���������ϵͳ��ԭ��ת����ϵͳ�����ӡ�ȷ����ʶ���ת�˶�״̬�ı仯������ϵͳ����ģʽ�л��ǽ����������յĹؼ����ء�
�������һ��ͨ������ת�ȵ��ֱ����ȵ�ѹ���仯�������жϻ�ת�˶�״̬�ķ���������Һѹ�ֱ��������ԣ������˵��г����ȵ��ֱ����ѹ����һ���ı�����ϵ���ɼ�3��ʱ�����ȵ��ֱ����ѹ��pctr�����бȽϣ�����ÿ���ɼ�ʱ������10 ms��
![]() , t1��t2��t3 (13)
, t1��t2��t3 (13)
����ת�ȵ��ֱ����ѹ��pctr��t1��t2��t3ʱ��ѹ���ʵݼ����Ʋ���Ϊ�㣬����ж�ƽ̨��ת�˶�״̬�ɼ��ٻ�����תΪ��ת�����ƶ�״̬����������ϵͳͨ����Ż��������ת����ϵͳ����ƽ̨�ƶ����ܻ��գ���pctr��t1��t2��t3ʱ��ѹ���ʵ���������ijѹ�����ֲ��䣬����жϻ�ת�˶����ڼ��ٻ�����״̬����������ϵͳ���ת����ϵͳ�Ͽ����ӣ���pctr��t1��t2��t3ʱ��ѹ����Ϊ0 Pa������ж�ƽ̨���ھ�ֹ״̬����������ϵͳ�������á�
3.2 ���յ�������������
Ϊ���ڻ�ת�ƶ��������չ�����������ƶ��ܲ����пɿ��ԣ��뱣֤���ƶ������л�ת������Ϊ�ù���ʱ����ѹ���õ���Ч���ڣ����ͨ��������������������Ļ��յ������ƶ�ת����ʵ�֡���ϵͳ�л��յ���Ŀ���ģʽ��ҪΪת�ؿ��ơ�
��תƽ̨����ת���������������յ����ɵĶ����ϵͳ����ƽ�ⷽ�̼�ʽ(6)��(7)����Q1=Q2��
![]() (14)
(14)
ʽ�У�Q1Ϊ�ƶ������л�ת��������������L/min��Q2Ϊ�ƶ������л������������������L/min��
��ʽ(6)��(7)��(14)�ɵã����յ������������ƶ�ת��Ϊ
![]() (15)
(15)
����������ϵͳ�����У�����ת�����ƶ���ѹ���������������������ڻ��յ�������䵱ǰת��n�Ļ����ϣ����㲢������Ӧ���ƶ�ת��ָ�ͨ����������������ڻ��յ�������������С�ͷ����������Ӧת�ء�
��������ͬ����������ԣ���ת�Ӵ����ο�����ϵ��[14]���������̺͵�ѹ��������ʽ��ʾ��
![]() (16)
(16)
ʽ�У�![]() ��
��![]() �ֱ�Ϊ���d��q�����������
�ֱ�Ϊ���d��q�����������![]() Ϊ�������Ŵ�����Ld��Lq�ֱ�Ϊd��q���У�Id��Iq�ֱ�Ϊd��q�����������
Ϊ�������Ŵ�����Ld��Lq�ֱ�Ϊd��q���У�Id��Iq�ֱ�Ϊd��q�����������
 (17)
(17)
ʽ�У�ud��uq�ֱ�Ϊ���d��q���ѹ������RsΪ����������裻��eΪ����ٶȣ���fΪ��������������
Ϊʵ�ֵ��d��q�����������ƣ�����PI(����-����)�����㷨������eLqIq�ͦ�eLdId+��e��f��Ϊ�Ŷ������d���q��������Ʊջ����ݺ�������ʽ��ʾ��
 (18)
(18)
ʽ�У�Kpcd��Kicd�ֱ�Ϊ���d�����PI���Ƶı���ϵ�������ϵ����Kpcq��Kicq�ֱ�Ϊ���q�����PI���Ƶı���ϵ�������ϵ����
ͼ8��ʾΪ����ͬ���������ʸ�����ƿ�ͼ��
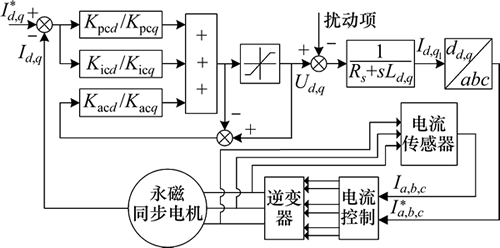
ͼ8 �������ʸ�����ƿ�ͼ
Fig. 8 Control diagram of motor current vector
3.3 ��������SOC�ж�
�ڻ�ת��������ϵͳ����ǰ�����ȼ�ǰ��������SOC�Ƿ�����ϵͳ��������Ҫ���趨��������SOC����������ΧΪ����ֵSOCmin������ֵSOCmax����
SOCmin��SOC��SOCmax (19)
�����ݲ��漰�����������������ýΣ����Դ˴�������SOCmin����SOCС��SOCmaxʱ��ϵͳ�жϿ��Խ����ϳ�ƽ̨�ƶ��������գ���SOC����SOCmaxʱ����������ϵͳ���������Բ��û�ת����ϵͳ����ƽ̨��ת��
3.4 ��ת�ƶ���������ϵͳ���Ʒ���
����ǰ��ķ������Ա�������Ļ�ת�ƶ���������ϵͳ�ƶ�������Ŀ��Ʒ�������ͼ9��ʾ���ڳ�������SOC��������������Χ�Ļ����ϣ����ݻ�ת�ȵ��ֱ����ȵ�ѹ���仯����ȷ�ϻ�ת�ƶ�״̬��ͨ���ɼ���ת�����ƶ��ڵ�ѹ���ͻ��յ��ת���ۺϼ��㲢���Ƶ�����ƽ̨�ƶ�����ת�أ�ʵ���ϳ�ƽ̨�ƶ���ͬʱ��ɻ�ת���ܵĻ��ա�
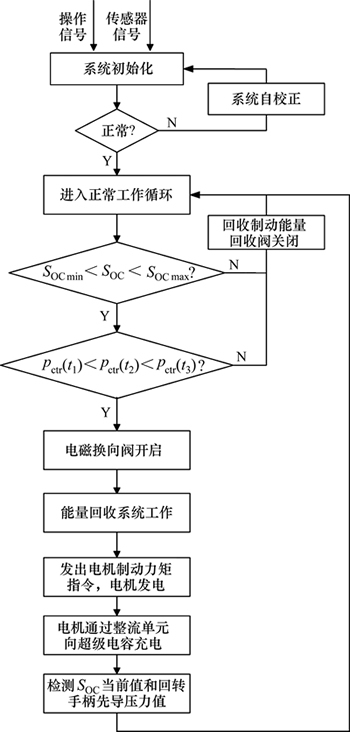
ͼ9 ��ת�ƶ���������ϵͳ��������ͼ
Fig. 9 Flow chart of rotary braking energy recovery system
4 �����о�
4.1 ��ת�ƶ���������ϵͳ���潨ģ
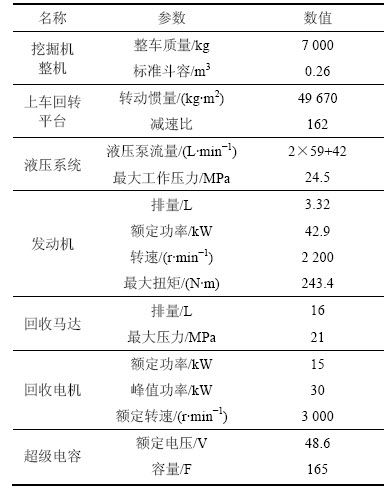
���ݻ�ת�ƶ���������ϵͳ�Ĺ���ԭ��������ǰ����ϵͳ��Ԫ����ѧģ�ͣ��ڿ��dz�ʼ�����ͱ߽������£���AMESim�����½����˻�ת����������������������ݵ���ģ�ͣ��ڶ��嶯��ѧ����Adams��ģ���ھ���ϳ���תƽ̨������ͨ�����Ϸ�����ʵʱ����ƽ̨��ת�����еı为�أ��õ���ת�ƶ���������ϵͳ����ģ����ͼ10��ʾ����ɽ������7 t��Һѹ�ھ��Ϊ��϶���ϵͳƽ̨���з�������������Ͷ���ϵͳ���������������1��ʾ��
ͼ10 ��ת���ܻ���ϵͳ����ģ��
Fig. 10 Model of rotary braking energy recovery system
��1 �����Ͷ���ϵͳ������������
Table 1 Main parameters of vehicle power system
4.2 ������
ϵͳ����ģ����ʵ���غ�����Ϊ���룬ͼ11��ʾΪ�ھ���ڽ��е����ھ���ҵ�����µ�Һѹϵͳ���ʱ仯���ߡ�ѡȡ�ھ��1��������ѭ�����ڣ��ϳ�ƽ̨�ڲ������غͿ����¸����1�λ�ת��������ת�ƶ���������ϵͳ����������2��
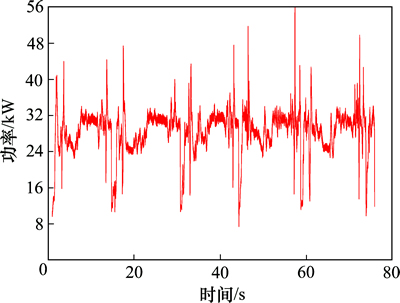
ͼ11 ����ϵͳ���ع�������
Fig. 11 Power curve of dynamic system
��2 ��ת�ƶ���������ϵͳ������
Table 2 Simulation results of rotary braking energy recovery system

�ɱ�2��֪�����ھ�����ؾ�����ת�Σ���ת�ƶ���������ϵͳ����������Ϊ3.16 kJ��ռ�ھ����ת�ƶ��ɻ���������44.1%�����ھ�����ػ�ת��λ�Σ�ϵͳ��������2.33 kJ��ռ�ɻ���������48.3%�������ھ���ڵ����ھ��»�ת�ƶ�����������Ϊ![]() =(3.56+2.33)/(7.97+4.82)��100%=46.1%��ʵ���˽Ϻõ���������Ч�ʣ��ɻ�����������Һѹ�ھ���ϳ�ƽ̨ת�������ͻ�ת�ٶ����ۼ�����Եõ������ھ������ѭ���У����ؾ�����ת�������յ������Ͽ��ػ�ת��λ�θߣ�����Ϊ����װ�����������ۺϵ��ϳ�ƽ̨ת�������ȿ���ʱ�Ĵ�
=(3.56+2.33)/(7.97+4.82)��100%=46.1%��ʵ���˽Ϻõ���������Ч�ʣ��ɻ�����������Һѹ�ھ���ϳ�ƽ̨ת�������ͻ�ת�ٶ����ۼ�����Եõ������ھ������ѭ���У����ؾ�����ת�������յ������Ͽ��ػ�ת��λ�θߣ�����Ϊ����װ�����������ۺϵ��ϳ�ƽ̨ת�������ȿ���ʱ�Ĵ�
5 �����о�
Ϊ����֤����ת�ƶ���������ϵͳ�Ļ���Ч���������������ϴ����������ϵͳ����ƽ̨��������ƽ̨��������ģ��ԭ���뱾�ķ���ԭ��ͼ��ͬ�������ͷŸ������ֱ������ݲ����ǡ����ñ�����ƽ̨��Ҫ����2��������о���������������Ч���о��ͻ�ת�ƶ������о�������IFM Electronic��˾�Ĺ��̻�еר�ÿ�����CR0200��Ϊ��λ�����ɼ����������ݣ����Ի�ת�ƶ���������ģ����п��ƣ�ͨ��CAN��������λ���ʼDZ����Է��ʹ�����ʵʱ���ݺ�ϵͳ״̬�������ݣ���λ�����ϵͳ״̬ʵʱ��ʾ�Ͳ������ݵĴ洢��
5.1 ���鷽��
����GB/T 7586��2008��Һѹ�ھ�����鷽����[15]�������������л�ת90�㶨���ھ���ҵ���ԣ�����Ϊ�����ھ���ѭ��(�����·š��ھ�������+��ת90�㡪ж������ת��λ)��ͼ12��ʾΪ�����ھ���ҵ�������鷽����ÿ�ι���15 min����ʵʩ3�����飬�ɼ��������ݼ���ȡƽ��ֵ���ⶨ����¼�ھ���ҵʱ�䡢�ھ�������ת�����ȡ�
�ھ���ҵ����ѭ������������¡�
1) ��ʼ��̬���ﵽ�ھ���״̬ʱ�������ݼ�������µ��һֱ�ߣ����ݳݼ������߶ȱ�����10 cm���ڣ������ڴ�ֱ��̬����Լ30�㡣
2) �����ھ��Զ��˽µ�ΪԲ�ģ����˴���״̬��ʼ���գ����սǶ�Ϊ-30�㣬�ھ����d=1 m��
3) ��ת90�㡢������������ת��ָ��λ�ã���������Ҫ��֤�������ݾ�������ж���߶�h=2 m��
4) ����ж��������ж��ʱ�����ݳݼ�������µ㡢���˽µ��1��ֱ�ߡ�
5) ��ת��λ����ת��λ���ھ�ʼ����̬��

ͼ12 �����ھ���ҵ�������鷽��
Fig. 12 Test method of typical mining operation
5.2 ����������
�ڵ����ھ���ҵ�����£�ͼ13��ʾΪ��������������ѭ���Ļ�ת�ƶ������������ߡ���ͼ13���Կ�����2�λ�ת�ƶ���������������������ϼ�Ϊ5.23 kJ��Ϊ�ھ����ת�ƶ��ɻ���������40.9%�����ǵ�Ԫ����Ч�ʡ�Һѹ��·�س���ʧ�ȵ���ϵͳ������������ģ�������������������������ݻ����൱��֤
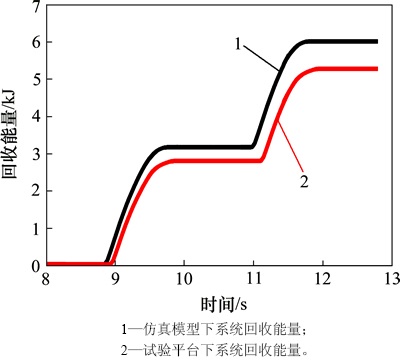
ͼ13 ϵͳ������������
Fig. 13 Recovery energy curve of system
���˷���ģ�͵�ȷ�Ժ��������շ�������Ч�ԡ�
��ת�ȵ�ѹ�����������շ������ź�������ͼ14��ʾ�����ϳ�ƽ̨��ת�ƶ������У�����ǰ������Ļ�ת�˶�״̬�жϷ��������ֱ��ȵ�ѹ����3.5 MPa��С��2.3 MPaʱ���������������������շ�����12 V�ĵ�ѹ����ͨ���źţ�ϵͳ����ȷ��ʶ��ƽ̨�����ת�ƶ�״̬��ͼ15��ʾΪ��ת�����������ѹ���͵��ת�����ߡ���ϵͳȷ�Ͻ����ת�ƶ�״̬���������շ�����������ϵͳ�����תϵͳ������������Ϳ�ѹ��Ѹ������������ѹ�������յ�����տ�����ָ���������ת��60 N��m������������Ϳ�ѹ��(����ת����B��ѹ��)�½������Ʋ������趨��15 MPa��ʹ��ת�������ѹ���õ���Ч���ڣ�������������յ�ͬʱҲʵ����ƽ̨��ת�ƶ��Ŀɿ��ԡ�
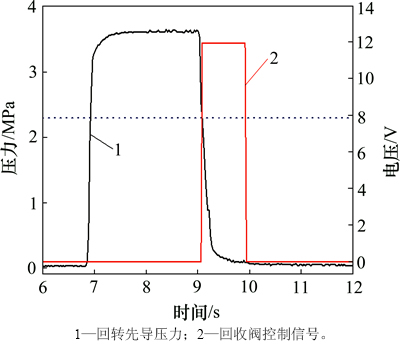
ͼ14 ��ת�ȵ�ѹ�����������շ������ź�����
Fig. 14 Rotation pilot pressure curve and control signal of energy recovery valve
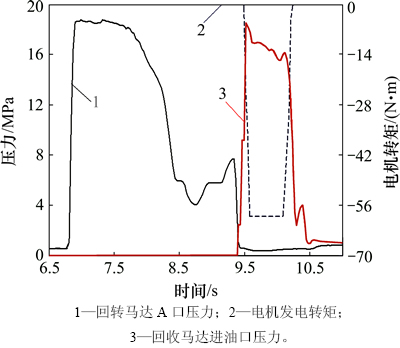
ͼ15 ��ת�����������ѹ���͵��ת������
Fig. 15 Pressure curve of rotary motor and recovery motor, and torque curve of electric motor
ͼ16��ʾΪƽ̨��ת�ٶ����ߡ������غͿ��ػ�ת�ƶ�������ƽ̨���ٶ���38.2��41.7 (��)/s��С��0 (��)/s��2���ƶ���ʱ��ֱ�Ϊ0.63��0.48 s���봫ͳҺѹϵͳ�»�ת�ƶ�ʱ�����һ�£��������ڲ������л�ת�ƶ���������ϵͳ�Ļ�϶����ھ��ʱ������ƽ̨��ת��ͬ�Ƕȣ���ת����ʱ�����ԭ�д�ͳҺѹ�ھ����Ȼ������仯�������Ӱ��ϵͳԭ�еĻ�ת�������ܺͲ������ܡ�
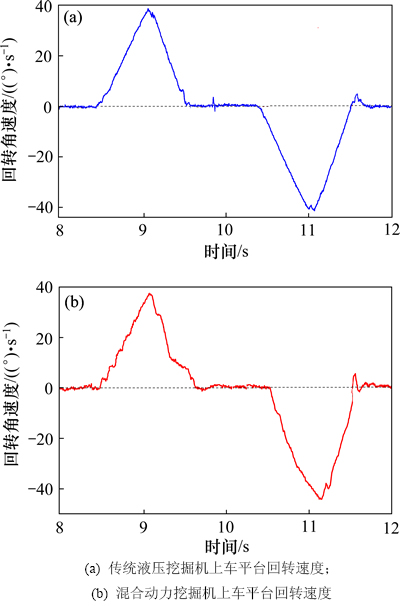
ͼ16 �ϳ�ƽ̨��ת�ٶ�����
Fig. 16 Rotation speed curve of swing mechanism
6 ����
1) �ڶ�Һѹ�ھ��������ҵ�������ܺĽ��з����Ļ����ϣ������һ��Һѹ����+���Ϊ���շ�ʽ����������Ϊ����Ԫ���Ļ�϶����ھ����ת�ƶ��������շ�����
2) ������ת�ƶ���������ϵͳ�з��������������������������ݵȹؼ�Ԫ����ѧģ�ͣ��ڶԻ�ת�˶�״̬ȷ������������ģʽ�л������յ������������ƺͳ�������SOC�жϵĻ����ϣ���������������ϵͳ�Ļ���Һ���Ϸ���ģ�ͣ����ھ��ʵ���غ���Ϊ�����ϵͳ��������Ч�����з��������������������ת�ƶ���������Ч���Ϻá�
3) ��˻�϶����ھ����ת�ƶ���������ϵͳ����ƽ̨���Ը�����ϵͳ����������Ч���ͻ�ת�ƶ����ܽ����������о��������о�������������������շ������У��ڲ�Ӱ���ھ����ת�������ܵ�ͬʱ��ƽ̨��ת�ƶ���������Ч�ʿɴﵽ40%���ϣ�Ϊ��һ�����л�������������������ھ�����������ʺͽ���β���ŷŵ춨������
�ο����ף�
[1] INOUE H. Introduction of PC200-8 hybrid hydraulic excavators[J]. Komatsu Technic Report, 2008, 54(161): 1-6.
[2] KAGOSHIMA M, KOMIYAMA M, NANJO T, et al. Development of new hybrid excavator[J]. Kobelco Technology Review, 2007, 21(11): 39-49.
[3] ����ʢ, ���廪, �Ŵ���, ��. ��϶����ھ�����ܻ���ϵͳ�����Ż�������[J]. ���ִ�ѧѧ��(��ѧ��), 2014, 44(2): 379-386.
LIU Changsheng, HE Qinghua, ZHANG Daqing, et al. Parameter optimization and experiment of potential energy recovery system of hybrid excavator[J]. Journal of Jilin University (Engineering and Technology Edition), 2014, 44(2): 379-386.
[4] ������, ��ǿ. Һѹ��϶����ھ������ϵͳ�IJ���ƥ�䷽��[J]. �Ϻ���ͨ��ѧѧ��, 2013, 47(5): 728-733.
LIN Tianliang, LIU Qiang. Method of parameter matching for hydraulic hybrid system for excavators[J]. Journal of Shanghai Jiao Tong University, 2013, 47(5): 728-733.
[5] LIN Tianliang, WANG Qingfeng. Development of hybrid powered hydraulic construction machinery[J]. Automation in Construction, 2010, 19(1): 11-19.
[6] WANG Tao, WANG Qingfeng, LIN Tianliang. Improvement of boom control performance for hybrid hydraulic excavator with potential energy recovery[J]. Automation in Construction, 2013, 30: 161-169.
[7] ������. ��϶����ھ���������ܻ����о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2012: 18.
LI Tiehui. The research on boom potential energy regeneration of hybrid excavator[D]. Changsha: Central South University. School of Mechanical and Electrical Engineering, 2012: 18.
[8] �����. �͵��϶����ھ���Ĺؼ������о�[J]. ��е����ѧ��, 2013, 49(20): 123-129.
WANG Qingfeng. Research on key technology of oil-electric hybrid excavator[J]. Journal of Mechanical Engineering, 2013, 49(20): 123-129.
[9] ����͢, �����, Ф��. ��϶���Һѹ�ھ��Һѹ�����������յķ��漰����[J]. ��е����ѧ��, 2007, 43(8): 218-223.
ZHANG Yangting, WANG Qingfeng, XIAO Qing. The Simulation and experimental of hydraulic motor energy recovery system in hybrid excavator[J]. Chinese Journal of Mechanical Engineering, 2007, 43(8): 218-223.
[10] ����, �ε³�, �º���, ��. ������϶����ھ��ϵͳ��ģ�����Ʋ��Է���[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��), 2010, 38(7): 1079-1084.
LIU Gang, SONG Dechao, CHEN Haiming, et al. Modeling and control strategy of parallel hybrid system in hydraulic excavator[J]. Journal of Tongji University (Natural Science), 2010, 38(7): 1079-1084.
[11] ��ΰ, ���̺�. Һѹ��϶����ھ������������Ч�ʷ���[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2012, 40(1): 82-87.
SHEN Wei, JIANG Jihai. Analysis of energy recovery efficiency of hydraulic hybrid excavator[J]. Journal of South China University of Technology(Natural Science), 2012, 40(1): 82-87.
[12] �ܳ�, ����, ����, ��. Һѹ�ھ����ת�ƶ���������ϵͳ[J]. �㽭��ѧѧ��(��ѧ��), 2012, 46(1): 142-149.
GUAN Chen, XU Xiao, LIN Xiao, et al. Recovering system of swing braking energy in hydraulic excavator[J]. Journal of Zhejiang University (Engineering Science), 2012, 46(1): 142-149.
[13] �콨��, ������, ����ʢ, ��. �ھ����ת���ܻ���ϵͳ����[J]. ��е������о�, 2011, 27(6): 84-87.
ZHU Jianxin, LI Saibai, LIU Changsheng, et al. Research of slew platform energy recovery system in excavator[J]. Machine Design and Research, 2011, 27(6): 84-87.
[14] ������, ����Ȫ, ����, ��. ����ʽ������Ŵ�ͨ�л��͵���������ʸ�����Ʋ����о�[J]. �й��������ѧ��, 2012, 32(15): 140-147.
ZHU Tingting, DENG Zhiquan, WANG Yu, et al. Research on hybrid-excited flux-switching machine and the current vector control strategy[J]. Proceedings of the CSEE, 2012, 32(15): 140-147.
[15] GB/T 7586��2008, Һѹ�ھ�����鷽��[S].GB/T 7586��2008, Hydraulic excavators��test methods[S].
(�༭ �°���)
�ո����ڣ�2015-08-08�������ڣ�2015-10-27
������Ŀ(Foundation item)�����ҿƼ�֧�żƻ���Ŀ(2014BAA04B01)�����Ҹ����о���չ�ƻ�(863�ƻ�)��Ŀ(2010AA044401)������ʡ�Ƽ��ƻ��ص���Ŀ(2010GK2007) (Project(2014BAA04B01) supported by the National Science and Technology Pillar Program; Project(2010AA044401) supported by the National High Technology Research and Development Program (863 Program) of China; Project(2010GK2007) supported by Science and Technology Plan of Hunan Province)
ͨ�����ߣ����廪��˶ʿ�����ڣ���ʿ����ʦ�����»���һ�廯�����о���E-mail: shanhe5078@163.com
ժҪ��Ϊ�˻���Һѹ�ھ����ת�ε��ƶ����������ھ��������ҵ�������ܺĽ��з��������һ����Һѹ����+���Ϊ���շ�ʽ����������Ϊ����Ԫ���Ļ�ת�ƶ��������շ�����������ת�ƶ���������ϵͳ�з��������������������������ݵȹؼ�Ԫ����ѧģ�ͣ��ڶԻ�ת�˶�״̬ȷ������������ģʽ�л������յ������������ƺͳ�������SOC�жϵĻ����ϣ�������������ϵͳ�ķ���ģ�ͣ����ھ��ʵ���غ���Ϊ�����ϵͳ��������Ч�����з����������ھ����ת�ƶ���������ϵͳ����ƽ̨���Ը�����ϵͳ����������Ч���ͻ�ת�������ܽ��������о����о�������������������շ������У��ڲ�Ӱ���ھ����ת�������ܵ�ͬʱ��ƽ̨��ת�ƶ���������Ч�ʿɴﵽ40%���ϡ�
[4] ������, ��ǿ. Һѹ��϶����ھ������ϵͳ�IJ���ƥ�䷽��[J]. �Ϻ���ͨ��ѧѧ��, 2013, 47(5): 728-733.
[7] ������. ��϶����ھ���������ܻ����о�[D]. ��ɳ: ���ϴ�ѧ���繤��ѧԺ, 2012: 18.
[8] �����. �͵��϶����ھ���Ĺؼ������о�[J]. ��е����ѧ��, 2013, 49(20): 123-129.
[9] ����͢, �����, Ф��. ��϶���Һѹ�ھ��Һѹ�����������յķ��漰����[J]. ��е����ѧ��, 2007, 43(8): 218-223.
[11] ��ΰ, ���̺�. Һѹ��϶����ھ������������Ч�ʷ���[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2012, 40(1): 82-87.
[12] �ܳ�, ����, ����, ��. Һѹ�ھ����ת�ƶ���������ϵͳ[J]. �㽭��ѧѧ��(��ѧ��), 2012, 46(1): 142-149.
[13] �콨��, ������, ����ʢ, ��. �ھ����ת���ܻ���ϵͳ����[J]. ��е������о�, 2011, 27(6): 84-87.
[15] GB/T 7586��2008, Һѹ�ھ�����鷽��[S].GB/T 7586��2008, Hydraulic excavators��test methods[S].
