
DOI: 10.11817/j.issn.1672-7207.2017.03.019
��������Ŀ����ƶ�ʽ��λ�����о�����
����1������1�����Ļ�1��������2��������3
(1. ���ȴ�ѧ �������ѧ�뼼��ѧԺ������ ���ţ�361021��
2. ���ݴ�ѧ �������ѧ���������ѧԺ���㶫 ���ݣ�510006��
3. ���Ŵ�ѧ ����ѧԺ������ ���ţ�361005)
ժ Ҫ��
�����Լ��ƶ����ٵ��ص㣻ͨ������Ŀ�궨λΪ���ķ�����Ŀ��̽��Ϊ���ķ��������ܶ�λΪ�����ƶ�ʽĿ����ٷ���(��ΪĿ����ƶ�ʽ��λ����)���о���״�������ͱȽϲ�ͬ�������ص��Ӧ�����������з�����Ȼ������߸����������������������ܺģ����ǻ�����һЩ���⡣���ڴˣ��ܽ�Ŀ����ƶ�ʽ��λ���ٷ����ڷ������͡�����ṹ�ͽڵ�ģ�͵ȷ�����ܴ��ڵ��о��ȵ㣬ָ�����о��ͷ�չ���ơ�
�ؼ��ʣ�
���ߴ������������ƶ��ڵ���Ŀ�������Ŀ�궨λ�������ܺ���
��ͼ����ţ�TP393 ���ױ�־�룺A ���±�ţ�1672-7207(2017)03-0701-11
Survey of location-centric target tracking with mobile elements in wireless sensor networks
PENG Zhen1, WANG Tian1, WANG Wenhua1, WANG Guojun2, LAI Yongxuan3
(1. School of Computer Science and Technology, Huaqiao University, Xiamen 361021, China;
2. School of Computer Science and Educational Software, Guangzhou University, Guangzhou 510006, China;
3. School of Software, Xiamen University, Xiamen 361005, China)
Abstract: The basic process of target tracking and the properties of tracking solutions with mobile elements were introduced. By distinguishing location-centric methods and detection-centric methods, the current research status of the location-centric target tracking methods were reviewed. The properties and application fields of different solutions were analyzed and compared. Although the existing solutions can significantly improve tracking quality and reduce energy consumption of the whole network, there are also some problems. Based on these discoveries, some possible research hotspots of mobile solutions were summarized in many aspects, such as method types, network architecture, node model, and so on, indicating the future direction of research and development.
Key words: wireless sensor networks; mobile elements; target tracking; target localization; network energy consumption
���ߴ���������(wireless sensor networks)�ɴ���С�ɵĴ������ڵ����[1]���ڵ�ͨ������ͨ�Ž����������ӣ���ͨ������װ�ø�֪��Χ�Ļ����Լ�������״̬��Ϣ���Ӷ�ʵ����Ϣ����������������ں�[2]����ˣ����ߴ����������ڳ���֮�������������Ǽ���Ĺ�ע����������ҵ�ܿ�����Ϊ���ߴ�����������δ��ȫ���Ĵ������ҵ֮һ��MIT����������Ϊ���ߴ��������缼���Ǹı������ʮ���¼���֮һ[3]�����ߴ��������������о���21���ͳ�����˿��ٷ�չ������ؼ��������㷺��Ӧ���ڹ�������[4]����������[5]����������[6]��ҽ�ƽ���[7]�ͳ��н���[8]������Ŀ����������ߴ������������ҪӦ��[9]������ͨ�������Ӧ�ò�ͬ��Ŀ���������Ҫ���ٵ�Ŀ�����ƶ��ģ�����Ƿ������ߡ�Ұ������ȡ���Ŀ������ڼ��������ʱ�������еĴ������ڵ㽫������״̬�л�����Ծ״̬[10]������Ŀ����г�����֪�Ի����ʵʱ��Ϣ����Ŀ���ƶ�ʱ���ڵ���Ҫ����Ŀ����ƶ��켣��������ǰ���Ѳ��ֽڵ�[11]����ֹĿ�궪ʧ�����ڴ������ڵ�ͨ���ɵ�ع��磬����֮����Ѹ������磬һ���ڵ�������ľ�����ýڵ㡰���������������������������ڵ�Խ��Խ��ʱ����������ڽ�����ä��[12]���ƶ���ä���ڵ�Ŀ�꽫���������⡣��ˣ������Ч�ؼ��ٸ��ٹ����е��ܺ����о��߹�ע����Ҫ����[13]����ʱ��Ϊ�˽������㷨�ĸ��ӳ̶��Լ����ܺģ��о�����Ҫ�Խ�������Ч��Ϊ����[14]��ͬʱ�����������������Ҫ��������̶��������ڵ����������Ľ�׳��[15]�����ŵ������칤�պͻ�е���켼���ķ�չ���ƶ��������õ��˹㷺��Ӧ��[16]����ȹ̶�������������Ӧ�Ը�ǿ����Ӧ�÷�Χ���㡣�ر�����Ŀ�����Ӧ���У��ƶ��ڵ�������������ơ����ȣ���Ŀ������ڼ��������ʱ���ƶ��ڵ�����������ƶ�����Ŀ���ƶ����Ӷ����Ӷ�Ŀ��ĸ�֪���ݣ���������[17]����ˣ������ƶ��ڵ���ܴﵽ�����̶��ڵ�ļ��ǿ�ȡ����ң���Ŀ���ƶ�ʱ���ƶ��ڵ���Ը���Ŀ���˶�����Ч�ؼ��ٲ�����ٵĹ̶��ڵ����������⣬���нڵ㡰���������ƶ��ڵ��ܹ����в����Ա�֤���罡׳�ԺͶ�Ŀ�����Ч���[18]����ˣ���ȹ̶�����������Ŀ����٣��ƶ�ʽĿ����ٷ����ܸ��õؼ��Ŀ�꣬��߸���������ͬʱ���ٽڵ���ܺģ��ӳ�����������[19]������Խ��Խ����о�������˲�ͬ���ƶ�ʽĿ����ٷ����������о���Ŀ������е�Ŀ�궨λ��Ŀ��̽���Ϊһ̸����ʵ�����������Ų�ͬ�IJ��ص㡣Ŀ�궨λ�ǽ��������в���λ����֪�Ľڵ�����λĿ��[20]�����õĶ�λ������Ϊ���ڲ��ķ����ͻ��ڷDz��ķ���2��[21-22]�����ڲ��ķ�����Ҫ�����ڵ���Ŀ���ľ��롢�Ƕȵ���Ϣ����ʹ�����߲��������Dz����ȷ�����λĿ��[23]�����ڷDz��ķ�������������ͨ����Ϣ��λĿ�ꡣ����Ŀ����ƶ�ʽ��λ���ٶ��ԣ�����ڿ������籾���ص������µõ�Ŀ���ʵʱλ������Ҫ�������Ҫ���⡣��Ŀ��̽��[24]��Ŀ�궨λ�����Ե��������ȣ�����Ŀ�IJ�ͬ��Ŀ�궨λ��Ҫ�õ�Ŀ���ʵʱλ�ã���Ŀ��̽����Ҫ��ע��֪Ŀ��ʱ�õ������ݣ���Щ���ݷ�ӳ��Ŀ���״̬��Ϣ�������еķ�����Ҫʶ��Ŀ������ݣ�������Ŀ���������[25]�����ʹ��Ŀ��̽������ڿ��������Ч�ظ�֪Ŀ�ꡣ��Σ�����Ŀ�IJ�ͬ��Ŀ��̽����Ŀ�궨λ��ʹ�õ�Ӳ��Ҳ����ͬ����Ŀ�궨λ�У��ڵ������Ҫ�õ�����λ�ã�������Ҫ��װ����GPS(global position system)��ê�ڵ�Ѱ�����[26]��������Ŀ��̽��ʱ����Բ�ͬ���͵�������������Ҫװ����ͬ�Ĵ�������������������������ȡ��ܵ���˵��Ŀ��̽���ص��ע���ͨ����Ч�ص��ȴ������ڵ����ռ�Ŀ���״̬��Ϣ(���¶ȡ����������ȵ�)���Ӷ���֤Ŀ����һֱ���ڼ��֮�¡���Ŀ�궨λ��Ŀ��̽����̵Ļ�����ͨ����λ��Ŀ���ʵʱλ��(һ��ָ��������)Ϊ�ڵ�̽���ṩ�������ݡ���ˣ����Ľ��������ֿ�������ϸ����Ŀ����ƶ�ʽ��λ���١�ͨ�����䷽�����й����ܽ�ͷ������ǵ���ͬ���ص㣬��ʾ����֮�����ϵ���ҵ��ƶ�ʽĿ�궨λ������Ҫ����Ĺؼ����⣬̽�����ܵ��о��ص�ͷ�չ����Ϊδ�����о��ṩ�ο��ͽ��顣
1 Ŀ����ƶ�ʽ��λ���ٸ���
1.1 ��������
��ͳ��Ŀ�����ͨ������3����ز��֣���֪��ʽ����λ��ʽ��ͨ�ŷ�ʽ[27]�������ڼ�������ڵĽڵ���Ҫ�Ի������и�֪������֪��ʽ��������ε��Ƚڵ��Ը��õػ�ȡĿ����Ϣ��ͨ����֪�õ������ݽ�ΪĿ�궨λ�ṩ��ԭ���ϡ�����λ��ʽ��Ҫ�ӽڵ���ڶ��֪��������ȡ����Ч�IJ��֣���ͨ����Ӧ���㷨�õ�Ŀ��ĵ�ǰλ�á����գ�ͨ�ŷ�ʽ����������ת����ʽ�Լ��������֯�ṹ��������ƽ�������绹�Ƿֲ������硣�ɴ˿ɼ���Ŀ����ٷ����а�����3�������ศ��ɣ�����ͬ�����IJ��ص���в�ͬ��
�ƶ�ʽĿ��������ڴ�ͳĿ����ٷ����Ļ�����������ģ�����������������������д����ƶ��ڵ㣬��������ܵõ���ǿ����Ŀ����ƶ�ʽ��λ���ٷ�����ָ��Ŀ����ٵĹ����в��ϵض�λĿ�������������λ�ã������Ŀ����ٵ�Ч�ʺ�������
1.2 ��Ҫ����ָ��
����ָ������������Ŀ����ƶ�ʽ��λ���ٷ������ܸߵ͵ı������ڲ�ͬ�ĸ��ٷ��������ڷ����IJ��ص㲻ͬ������ָ��Ҳ������ͬ����ʹ�����Ƶķ�������������õĽ�ģ����ǧ����𣬶���ָ��Ҳ���нϴ�����ˣ������г��Ķ���ָ����������һЩ��Գ����ĸ���������Ǿ������ֵ����ͱ�ʾ��
1) Ŀ�����Ч�ʡ�Ŀ�����Ч����ָ������������������Ч���ٵ�Ŀ���ʱ���������ȡ�������������ں����������������ܶ�λ��Ŀ���ʱ��[28]��
2) Ŀ�궨λ��Ŀ�궨λ��������������λ���ȡ���λ���ļ���ʽ�ɱ�ʾ��Ŀ��IJ���λ����ʵ��λ��֮���ŷʽ����[29]��Ŀ�궨λ���ȵĸߵ��ںܴ�̶��ϻ�Ӱ��Ŀ����ٵ�Ч�ʡ�
3) �ڵ��ܺġ��ܺ��Ǵ������������Ҫ����ָ�ꡣ������ͨ�������ڵ㣬�ܺ���Ҫ���������ݵĸ�֪�ʹ�����̡���ط�����ͨ����û�в�����ٵĽڵ�ת������״̬�Խ�Լ�����������ƶ��ڵ㣬����Ҫ�������ƶ����ܺġ��������ֽε��ƶ�ʽ���ٷ�������ֱ�ӿ����ƶ��ڵ㱾�����ܺ�����[30]��
1.3 ���ڵ��������ս
Ŀ����ƶ�ʽ��λ���ٷ������ڵ��������ս��Ҫ������3�����棺
1) ��κ����ص����ƶ��ڵ����Ŀ�ꡣ�ƶ��ڵ㱾�����ص�ʹ����Բ��ر����صȴ�Ŀ�굽��������������Ŀ�꿿����������������������ѡ����Щ�ƶ��ڵ���Ŀ�꿿���Լ������Ŀ�꿿������ͨ����Ҫ�붨λ��ʽ���������ǡ�
2) �����Ч�ض�Ŀ����ж�λ���ƶ��ڵ��Ŀ��Ķ�λ��ʽ��̶��ڵ������ͬ�����Ƕ�λ��ʽ��Ӱ��ڵ��ƶ���ʽ�����磬����Ŀ��Ԥ��ķ������ܸ������ڽ��ڵ���Ԥ��λ�ô��ƶ�[31]��
3) ���ѡ����ʵ�����ṹ��Ŀǰ���ֲ�ʽ�̶�������������Ŀ����ٷ���ռ����Ҫ��λ��ȡ���˽Ϻõ�Ч�����ƶ��ڵ�ļ���ʹ������ṹ���Ӷ��������磬�ȿ�����ȫ�ƶ��ڵ���ɵ�ƽ�������磬Ҳ������ȫ�ƶ��ڵ���ɵķֲ������磬�������ǹ̶��ڵ����ƶ��ڵ���ɵķֲ�������ȵ�[32]��
2 Ŀ����ƶ�ʽ��λ���ٷ���
��Ŀ����ƶ�ʽ��λ���ٷ����У���ͬ���ٷ��������Ը�����ͬ����Щ�������ƶ��ڵ�������ƶ������Եȡ�ͼ1��ʾΪĿ����ƶ�ʽ��λ���ٷ������ԡ����ݸ��ָ��ٷ������ԵIJ�ͬ������ڶ��ַ����������Ը��ַ��ʽ���н��ܡ�
1) �����ƶ��ڵ�����ķ��ࡣ�����ƶ��ڵ�����������ռ������ͬ�����Է�Ϊȫ�ƶ��Ͳ����ƶ�2�֡�

ͼ1 Ŀ����ƶ�ʽ��λ���ٷ�������
Fig. 1 Properties of location-centric target tracking solutions with mobile elements in WSNs
ȫ�ƶ�������ָ�������Ľڵ㶼���ƶ��ڵ㣬���������Ϊ�ƶ�����������(mobile sensor networks��MSNs)�������ƶ�������ָ�������Ľڵ�����ƶ��ڵ�Ҳ�й̶��ڵ㣬���������Ϊ��ϴ���������(hybrid sensor networks��HSNs)[33]��
2) ���ڸ�֪ģ�͵ķ��ࡣ�������нڵ��֪ģ�ͣ����Է�Ϊ0-1ģ��[34]��˥��ģ��[35]�;���ģ��[36] 3�֡�0-1ģ���нڵ�ͨ��ʹ��1 bit����ʾ�ܷ��֪��Ŀ�ꡣ��Ŀ���ڽڵ�ĸ�֪�뾶��ʱ�ܹ���֪��Ŀ�꣬��������֪��˥��ģ�ͼ���ڵ���յ���Ŀ���ź�ǿ�Ȼ�������֮������������������������ʵ�����������ģ������Ľڵ���Ŀ���ľ��룬���Ҽ���ڵ���Ӿ�dz���������ģ�������ض��ij��ϣ����������˻���Ϊ�ƶ��ڵ㡣
3) �����ƶ������Եķ��ࡣ�����ƶ��ڵ��ƶ������ԵIJ�ͬ�����Է�Ϊ���ĵ��Ⱥ������ƶ�2�����͡������ĵ��ȷ����У��ƶ��ڵ�����������ͳһ���ȡ������ƶ��������ֲ�ʽ�������ڵ��ڱ��ش����ռ��������ݣ������о�����ν�����һ���ƶ���
4) ��������ṹ�ķ��ࡣ��������ṹ�IJ�ͬ���ɷ�Ϊƽ���ͺͷֲ���[32] 2�֡�ƽ���ͷ���ָ���������еĴ������ڵ��λƽ�ȣ�����������������ռ��ڵ��������ڵ㡣���ڷֲ��ͷ����У�������Ὣ�ڵ�ֳ���Σ��߲�Ľڵ�����������Ͳ�Ľڵ��´�ָ����绽�ѡ����ȵȵȡ�
5) ���ڸ���Ŀ�������ķ��ࡣ�����������Ŀ�������IJ�ͬ���ɷ�Ϊ��Ŀ��Ͷ�Ŀ��2�����͡���Ŀ�귽��ֻ���ٵ���Ŀ�꣬���ַ���ʵ�ֽϼ������ʺ�ʵ�����������Ŀ�귽������Ҫ����ͬʱ�Զ��Ŀ����и��٣����ַ����ȽϷ���ʵ�ʵ�Ӧ�ó���������Ҫ���Ǹ�������⣬���ƶ��ڵ�ĵ��ȵȡ�
���Ľ�Ŀ����ƶ�ʽ��λ���ٷ�����Ϊ������λ����������λ���������ࡣ������λ����ͨ�����������ʾĿ��λ�ã�������λ����ͨ����Χ����������ʾĿ��λ�á�����ķ��������ͼ2��ʾ��

ͼ2 Ŀ����ƶ�ʽ��λ���ٷ�������
Fig. 2 Categories of location-centric target tracking solutions with mobile elements in WSNs
3 Ŀ����ƶ�ʽ��λ���ٷ�������
��λ��Ŀ����ٹ����е���Ҫ���衣Ŀ�궨λ��ָ��Ŀ�����ʱ��ͨ����������ʵʱλ��[37]��Ŀ����ٵĹ��̿��Կ����Dz��϶�λ�Ĺ��̡���һ������������������Ҫ������2�����档һ�������߶�λ���ȣ���֤����������������ν�Լ�ܺģ��ӳ����������ڡ���ˣ�����Ŀ�궨λ���о�����2����չ��[38]������λ�ñ�ʾ��ʽ�IJ�ͬ����Щ�о��ֳɼ�������λ������λ2�����
3.1 ���������
������λ������Ŀ���λ�ñ�ʾΪ���������������ʽ������ֱ�����ꡢ�����ꡢGPS����ȡ���Ŀ����ж�λ֮ǰ�������е�ijЩ�ڵ�֪��������λ�ã���ͨ������Ϊê�ڵ�[39]����ê�ڵ��֪��Ŀ���������ê�ڵ�ͨ������λ�ù�ϵ��ͬ�ó�Ŀ�������λ�á���Ŀ����ƶ�ʽ��λ�����У��ƶ��ڵ�������Ҫ��Ŀ��ʵʩ���٣����Գ���Ҳ��䵱ê�ڵ�Ľ�ɫ[40]��Ϊ�˸��õظ���Ŀ�꣬һЩ������Ŀ����˶��켣����Ԥ�⡣�ƶ��ڵ����Ԥ����Ϣ��ǰ��Ŀ��Ԥ��λ���ƶ����Ӷ�����Ч�ض�Ŀ����к�����λ�����١������Ƿ����Ԥ�ⲽ�裬���ڽ�������λ�����ֳ����࣬������Ԥ��ķ����Ͳ�����Ԥ��ķ�����
3.1.1 ����Ԥ��ķ���
����Ԥ��ķ���ͨ��Ԥ��Ŀ����˶��켣����ǰ�����ƶ��ڵ��Ŀ����г������١�
���ڵ������ж�����ƶ����������䵱�ƶ��ڵ㡣����[41]��ע�����ͨ�������ƶ��ڵ���������Ż��Զ��Ŀ��Ĺ��ƣ������DSPCF(dynamic sensor planning and control framework)���������ýڵ������������ʽ��Ϊ�������������������������˲����й��ơ����ڹ���ǿ��Ļ�����(��ͼ3��ʾ)������[41]������ķ������к�ǿ������ԣ���Ŀ���������ڵ��������������ض�����ȶ�����������仯������[42]�о��������ö���ƶ��ڵ���ٵ���Ŀ�꣬�����AMSPF(adaptive mobile sensor positioning framework)��ܡ�����е��ƶ��ڵ�Ϊ���˻�(unmanned air vehicles��UAV)�����нڵ��ɻ�վ���ơ���վ������չ�������˲�(extended Kalman filter��EKF)������Ŀ���λ�ú��ٶȡ�

ͼ3 ʹ��3���ƶ������˶�λĿ��ʾ��ͼ
Fig. 3 Illustration of target localization using three mobile robots
֮����о��У��ƶ��ڵ�ѡ�ø���С�ɵĴ������ڵ㡣����[31]{Wimalajeewa, 2010 #97;Wimalajeewa, 2010 #44}���һ���ƶ��Ը��������㷨MATA(mobility assisted tracking algorithm)�������ڻ�ϴ����������и��ٵ���Ŀ�ꡣ�����еĽڵ��ֳɲ�ͬ�Ĵأ����ڹ̶��ڵ�ʹ��SIR(sampling importance re-sampling)�����˲��㷨����Ŀ��λ�ã��������ƶ��ڵ����Ŀ��ʵ�֦²㸲�ǣ��������Ц¸��ڵ�ĸ�֪��Χ�ܹ�����Ŀ����������
���ڻ�ϴ����������е�Ŀ����٣�����[43]���һ�ֲַ�ʽ�����Ż�����DEOM(distributed energy optimization method)�������еĽڵ��������ؽ��зִء���ͷ�ڵ�ͨ��ƽ������Ⱥ�Ż�����PPSO (parallel particle swarm optimization)�������ƶ��ڵ㣬�Ӷ���ڵ㸲�Dz���С���������ġ�Ŀ���λ��ͨ���Ľ��������˲����й��ơ��÷�����û�������ȷ�ĸ����㷨�����ǶԸ��ٹ��̵�һ���Ż���
����[44]���һ�ֲַ�ʽЭ�������㷨CDTA (cooperative distributed tracking algorithm)�����㷨��Ҫ�����ڵ㲿��ͽڵ��ƶ�����2���Ρ��ڵ㲿�����Ҫͨ������Ŀ�꺯�����Ż����پ��Ⱥ������ܺġ��ڵ��ƶ����ƽ������ݶȷ��������������ǣ�û�жԽڵ�ļ����������˵����������Ϊ�ڵ���Լ���������κ�λ�õ�Ŀ�ꡣ
����[45]�����һ���ƶ����ƿ��DMICS (distributed mobility implementation control scheme)�����Ż���Ŀ��������ܵ�ͬʱ����������Լ���DZ�֤���������еļ���������뻯��ÿ���ƶ��ڵ㶼��ͨ�����Ŀ���źŵ�TOA��DOA��Ŀ����и��٣��Ҽ���ÿ���ڵ㶼�ܵ�����λĿ�ꡣ
����[46]���TLIT(target localization improving tracking)��������Ŀ���ƶ���ijЩ�ڵ㸽��ʱʹ��TOA��������Ŀ����������ʵ��Ŀ���ȷ���١��˷�����ȱ���Ǽ��������нڵ㶼�ܶ�λ���Լ���λ�ò������нڵ㶼���ͨ�ţ���Խڵ��Ӳ��Ҫ��ϸߣ�ͬʱ�������ӽڵ��ܺġ�
����[47]ͬʱ��������Ժ������������ʹ���ƶ����ڵ�Ե�Ŀ����и��٣�Ŀ�����������Э����������߸��پ��ȣ�ʹ�ø���ģ�ͶԽڵ�ļ��ֵ���н�ģ��������������Ϣ����(FIM)������ʽ��Ϊ���پ��ȵĶ���������˼·�Ƕ��Ż���Ͻ��в��ϼõ����տ��н���������3���㷨�ֱ�����ѡ����ʵĽڵ㡢���ٽڵ�Ŀ�����Ϻ��Ż��ڵ��ƶ���ͨ��ǰ2���㷨��CTSS(candidate task sensor selection)��MMCR(minimum-maximum combinations reduction)���ڵ�Ŀ�����ϵõ�����������ͨ����������ʣ����������ȷ���ڵ��������ϡ�Ȼ������������㷨ֻ��Ե�Ŀ����١�
MEYER��[48]����ķ���CoSLAT(cooperative simultaneous localization and tracking)����������[49]������ĸĽ�����ACoSLAT(advanced CoSLAT)������[50]����ķ���CS-DT(cooperative self-localization and distributed tracking)���ǽ���λ������������߶�λ���Ⱥ���Ч�ʡ�����CoSLAT�����������״̬�ı�Ҷ˹�����ݽڵ�֮���ͨ����Ϣ��Ԥ��״̬���ϸı�ڵ��Ŀ���״̬��Ϣ����������Ҫ�ϸߵ�ͨ�źͼ�����ۡ�ACoSLAT������иĽ�������ʹ��ȫ��״̬��Ϣ����ֻʹ�ò�����Ҫ��Ϣ�������ͨ�źͼ�����ۡ�CS-DT�����ǽ�������չ��ʵ���˶�Ŀ����٣�����˵��Ӷȵ�״̬��Ϣ��˷������˷�����ȱ�����㷨�Խڵ�Ӳ��Ҫ��ϸ����ܺĽϴ�
Ŀ����ƶ�ʽ��λ���ٷ����У�����Ԥ���������λ������һ�ֵõ��㷺�о��ķ�����������Ĺؼ��������ȷ����Ч��Ԥ��Ŀ�����һλ�ã��Լ���θ���Ԥ�������ƶ��ڵ���е��Ⱥͷ��䡣
3.1.2 ������Ԥ��ķ���
��Ȱ���Ԥ��ķ�����������Ԥ��ķ����������Ŀ����˶��켣����Ԥ�⡣��Щ����������������������ָ��(���������ȵ�)�������ƶ��ڵ㡣
������[51]�У��ڵ�Ժ͵�Ŀ���γɼ��������νṹ������Ŀ��λ��(��ͼ4��ʾ)���������һ�ֵ����ֲ�ʽ�㷨TBMTTS(triangulation based multi target tracking strategy)��Ϊÿ��Ŀ�����1�Խڵ㡣���ڸ��ٹ��̵Ķ��ʱ��Ƭ�Σ��㷨����С���ڵ��ܺ�Ϊ��������һʱ��Ƭ�ڵ��λ�á��÷����IJ������������Ŀ����һ��ʱ�����ǹ̶������ģ����ҹ��ڶ�λ�����ľ��嶨�岢û�и���������

ͼ4 2���ƶ��ڵ��Ŀ�����
Fig. 4 Target tracking using two mobile nodes
���ê�ڵ��������ٵ����������[52]���FACT (fast and accurate cooperative tracking)�����������е��ƶ��ڵ��ͨ���Ի�����ھ���Ϣ����ʹ�ñ�Ҷ˹������ȷ���ƶ��ڵ��λ�ã�ͬʱ���ֱ���Ӧ������������ڻ�����ʱ���������������˲�(UKF)�Ͷ�ģ�����˲������ͻ������ض�λ��Ԥ���Ӱ�졣ȱ���Ǵ˷����ܽ����ܺģ����Dz�û�и����ܺķ�������ݣ���˵�������ܺķ������Խ�ԡ�
����[53]������ٵ�Ŀ��ķ���WTA(weighted tracking algorithm)����������ͨ���̶��ڵ��TOA����ֵ�������ƶ��ڵ��Ŀ���״̬�������붨�滮�ɳڷ�(semi-definite programming relaxation��SDP)�����ྶ���������µĶ�λ���⣬�Ӷ������ƶ��ڵ��Ŀ����и��١�����������ƶ��ڵ���ƶ��ٶȴ���Ŀ���ٶȣ���ʹ���㷨��ͨ�����ܵ������ơ�
��������в����ܿص��ƶ��ڵ㣬����[54]���û���ѧϰ����Ϊ�ƶ��ڵ㶨����һ�ֻ��ں˺����Ļع�ģ��FSDKR(first and second derivatives for kernel-based regression)����ģ������Ŀ���������һ�Ρ����ε������ڵ����һλ�á�����ӱ֮������ʹ�û���ѧϰ�����������ڵ����ݲ��滮�ڵ���ƶ������Dz�û����ȷָ�����������ݵ��������塣
����[55]����˷ֲ�ʽ����IDTA(improved decentralized tracking approach)�Զ��Ŀ����и��١��ƶ�Ŀ������RSS��Ϣ��������λ�ã�������λ����ɲ�ͬ�ķ��飬ÿ������ѡ��һ����sink�ڵ�Ͻ�����ʣ�������϶�Ľڵ���Ϊͷ��㣬ͷ����ռ�����Ŀ���λ����Ϣ��ת����sink�ڵ�������Ŀ�ꡣ������Ҫ���ƶ�Ŀ���ܸ����������ű�ڵ��RSS��Ϣ���������ж�λ����Ӳ��Ҫ��ϸߡ�
������Ԥ���������λ������Ҫ������λ�������������Ϣ���滮�ڵ���ƶ��������ڣ����õ���Ϣ���ܺĺ����ȡ���ˣ���������ѵ�Ҳ�������ͨ����Щ��Ϣ�������ص����ƶ��ڵ㡣
3.2 ����λ�ķ���
�����������λ����������λ�����õ���Ŀ��λ�ñ�ʾ��һ����Χ������������ijЩλ��Ԫ�ش��档Ŀǰ��ͨ����λĿ�����λ����ʵ��Ŀ����ٵķ������٣���Ҫ���о����¡�
����[56]����˷���CMACO(controlled mobility ant colony optimization)�������ɹ�����Ĺ̶��ڵ���ܿص��ƶ��ڵ㹹�ɡ�ͨ���������(interval analysis)��Ŀ���Ԥ��λ���þ��������ʾ(��ͼ5��ʾ)�������ƶ��ڵ㽫�������²������Ż���Ŀ��Ԥ������ĸ��ǡ�����������Թ�����Ĺ̶��ڵ���ܿص��ƶ��ڵ���ɵĻ�����磬��������㷨���õ�������ʽ�Ĵ�����ʽ��
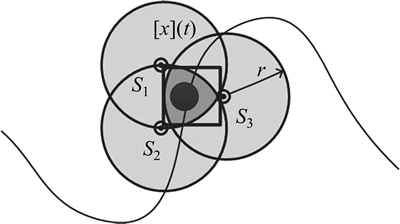
ͼ5 ����Ŀ��λ��
Fig. 5 Estimating of target position
���Ƶأ�����[57]�����CMPSO(controlled mobility particle swarm optimization)������[58]�����HSNPSO(hybrid sensor network particle swarm optimization)�����������ڽ����������еĵ�Ŀ��������⡣CMPSO��CMACO��˼�������ͬ��ֻ������������Ⱥ�Ż��㷨��HSNPSO����ͬ��ͨ������Ⱥ�Ż��㷨(particle swarm optimization)ʹ�ƶ��ڵ����ƶ�������̵ķ�ʽ��Ŀ�����λ���ƶ�������Ŀ��Ϊ�����γɵȱ�����������ʾĿ��λ�á�
����[59]���һ��Эͬ���ٷ���AMCMS (autonomous mobile coordinative moving strategy)���÷����ڱ�֤Ŀ���ÿ���ƶ����ܹ������������С��������ȵ��ƶ��ڵ��������÷������ÿ������˲�ģ����Ԥ��Ŀ���λ�ã������������(interval analysis)��Ŀ��λ�ñ���ʾ�ɾ��Σ��������ƶ��ڵ㸲����Щ�����ƶ��ڵ���Ҫ���ȵز���Ŀ���Ԥ�������ڣ��������ܱ�֤�����ٵĽڵ��������и���(��ͼ6��ʾ)�������㷨ֻ�������ƶ��ڵ��������û�и������ڵ�Ӧ���ƶ�����λ�á�

ͼ6 ���ٽڵ������
Fig. 6 Covering area with least modes
����[60]��Թ̶������������Ŀ�����Ӧ������˷���RPL(repositioning prediction localization)���÷���ͨ���������˲���Ԥ��Ŀ�����һλ�ã�����������Ż�sink�ڵ���ƶ����ӳ�����������ڡ��㷨��Ŀ�굱ǰλ������һλ��֮����������ڵĽڵ㶼�����������ܵ��´������������ġ�
����[61]�������Face Track��������������ͨ����ͬ�Ľڵ���Ϸָ�ɺܶ����(Face)����Ŀ����ٹ�����ֻ��Ҫ��λ�ƶ�Ŀ���Ƿ���ij���ض������м��ɡ�����[62]�ڴ˻������������ƶ�sink�ڵ㼴tracker�������t-Tracking��������Ŀ������һ���ƶ�ʱ������Ŀ���ƶ�����Ľڵ���㲢Ԥ��Ŀ���ƶ������ʱ�䣬��ת����tracker��ʹ���ܹ��ƶ���Ŀ��ڵ㸽��������и��١��÷������ŵ��ǿ����˴������ڵ�������������⣬���Ŀ��������֮��Ľڵ㴦������״̬���ܹ������ܺģ����⣬�˷��������˶Զ�λ��Ҫ���ܹ����ͶԽڵ�Ӳ����Ҫ��
ʹ������λ���ƶ�ʽ���ٷ��������Ǻܶࡣ���Կ������ƶ��ڵ�ͨ����������λ�ÿ��Ը��õع���Ŀ��λ�ã��ڶ�λĿ��ʱ��ʾ�����е����ơ�
4 ���з����Ƚ������
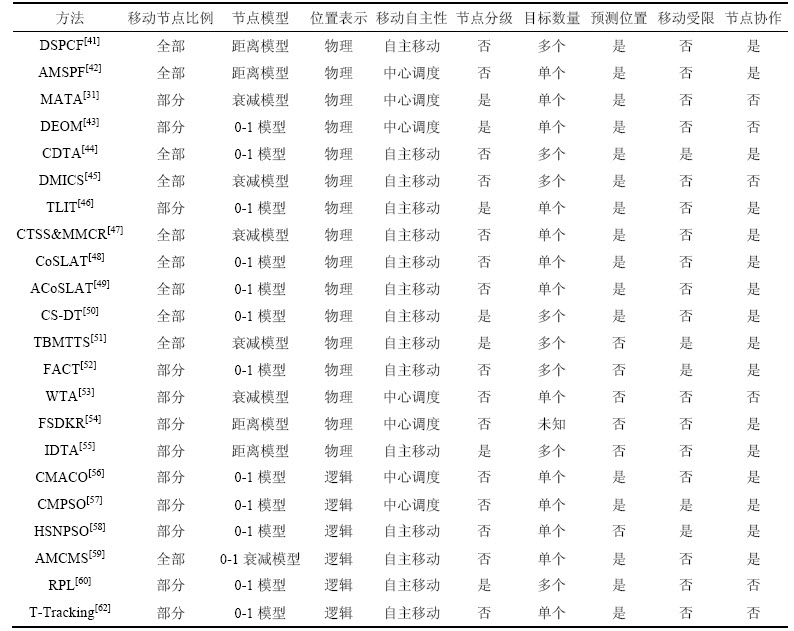
��1��ʾΪĿ����ƶ�ʽ��λ���ٷ����и������ԵıȽϡ��ɱ�1��֪��
1) ���ڵ����ڵ���˵���ڵ��֪ģ����Ҫ��0-1ģ�͡�˥��ģ�ͺ;���ģ��3�֣������������ʹ��0-1ģ�ͣ�������Ϊ����ģ�ͼ���ʵ�֣�һЩ������ʹ���˱ȽϷ���ʵ�������˥��ģ�ͣ�ֻ������ʹ���˾���ģ�͡���������������˵����С���ֶ�λ��ʽ���õ�������ʽ�ĵ��ȣ��ַ��������ƶ��ڵ������ƶ�����Ŀ�궨λ���١�
2) Ŀ�궨λ��Ҫʹ��������λ��ȷ��ʾĿ��λ�á�С���ֲ�������λ��Ŀ��λ�ñ�ʾ��һ���������⣬������о�ֻ���ǶԵ�Ŀ��ĸ��ٶ�û�п�����ν�����չΪ�Զ�Ŀ��ĸ��١����Ҵָ��ٷ�����Ԥ��Ŀ���λ�ã�����������ǰ�����ƶ��ڵ���Ԥ���λ���ƶ�����߶�λ���Ⱥ���Ч�ʡ�
3) �ַ������õ���ƽ���͵����磬�����ܹ����ٷ����ĸ����ԡ�ͬʱ�����������������ʹ�ö���ڵ��Э���ķ�����������Ϊ��Ŀ����ж�λ������Ҫ����ڵ���룬�ɲ�ͬ�ڵ�����ݹ�ͬȷ��Ŀ���λ�á����⣬�ֵķ�����ֻ���ǹ̶��ڵ���ܺģ���û�п����ƶ��ڵ㱾�����ܺ����⡣
���ݷ����ȽϿ��Կ������ݲ�ͬ��Ӧ�ã����ַ����ľ������ݲ�����ͬ�������ܵ���˵����Щ��������Ե������������2���棺��������������Ч�ʡ�����������ָ�ڵ��֪�������ݲ���ֵ����Ч�ԣ��Լ��ɲ���ֵ���õ�����ľ�ȷ�ԡ�������Ч���棬�ƶ��Խڵ��ܹ�����Թ̶��ڵ������Ҫ�����ƶ��ڵ��������ܺij�Ϊһ���µ����⡣ʵ���ϣ��������������������ζ���ܺĵ����ӡ�����߸���������ͬʱ�����ܺ���ʮ�����ѵģ������Ҳ�������û�������ƶ��ڵ��ܺ������ԭ��
��1 Ŀ����ƶ�ʽ��λ���ٷ����ص�Ƚ�
Table 1 Properties comparison between location-centric target tracking solutions with mobile elements
5 δ���о�����
��ǰ��������Ŀ��������ƶ��ڵ���Ժܺõ��ֲ��̶��ڵ���Ŀ������и���Ч�ʵ͡��ɿ��Բ��ȱ�㡣�ɴˣ��������������ͨ����������ʵ�ֵķ��������ǣ���Щ������Ȼ����������⡣���ڹ�����Щ���⣬ָ��δ���о�����
1) ����û�������硣�������о��У�����ȫ�ƶ��Ͳ��û��������о�������ƽ������ȫ�ƶ������У��ڵ���ƶ��ᵼ�����粻�ȶ������������ܺġ��ƶ��������������������������ڻ���������в��õ��ƶ��ڵ���Ŀ���٣�Ŀ�����һ��ʹ�ù̶��ڵ㣬ֻ�е��̶��ڵ������ٵ�Ŀ��ʱ�ٵ����ƶ��ڵ㡣�������ȿ��Լ��ٽڵ��ƶ��������ܺģ���������ȱ�֤������ȶ��ԣ���ˣ����ΪĿ������о��ķ�չ���ơ�
2) ���ͳһ�Ķ������������о��������õĶ������β�룬���ѶԸ��ַ�����������Ƚϡ���ˣ����ܶ��ƶ�Ŀ��Ķ�λ�������ͳһ�Ķ�����������ʹ�о�������رȽϸ��ַ�����Ч�ܣ����ӱ����ڽ����о���
3) �����ƶ��ڵ����������ơ������о�������ƶ��ڵ���������ƶ��������ơ���ͨ���ƶ��ڵ������Ҳ�����ģ�������ʵ��Ӧ�������ƶ����ܵ��������ص����ƣ���ˣ����Ժ���о�����Ҫ�����ƶ��ڵ����������ƣ�������Կ��ǶԽڵ������������ܺ����ƣ��ڷ������糡���������ϰ��ȣ�ʹ����ӷ���ʵ�ʵ�Ӧ�ó�����
4) Ŀ��λ�ò�������ʾ��Ŀǰ��Ŀ����ƶ�ʽ��λ�����о��У�Ŀ���λ�ñ�ʾ������������ꡣʵ���ϣ�ȷ��Ŀ��Ĵ���λ�þ��ܹ�������и��٣���ˣ����Ը����ʹ��������ķ�ʽ�����⣬���������껹�ܹ����Ͷ�Ŀ�궨λ���ȵ�Ҫ���ͶԽڵ��Ӳ��Ҫ����ܺġ�
5) ������ʵ�ʵĸ�֪ģ�͡��ִ�������ʹ�õĸ�֪ģ�Ͷ���0-1ģ�͡�����ģ�ͼ���ʵ�֣����Dz�����ʵ��������в��ַ���ʹ����˥��ģ�ͣ������ƶ��������ڵ���ƶ�ʹ������ͨ��˥��ģ�Ϳ��ܲ�����ȫ��ͬ��������Ϊ�ڵ���ƶ���Լ������Ŷ�����ˣ���ζ��ƶ��ڵ㽨�������Ƶĸ�֪ģ������Ҫ��������⡣
6) ����ʹ�÷ֲ����硣���ڴ������������о���������·�ɡ������ռ��ȣ��ֲ����������ƽ�������綼���ֳ���һ�������ơ�Ŀǰ���ڷֲ��������е��ƶ�ʽĿ������о����١��ֲ����������Ϊ�ƶ��ڵ�ĵ��ȴ����µ���������ˣ���Ҳ����Ϊδ��һ���µ��о����ơ�
6 �ܽ�
��ͳ�����ߴ����������ɹ̶��ڵ���ɣ��ڵ���ƶ�������ʹ���ڸ��ٹ����г������������������Ա�֤�����������ܺĽϸߵ����⡣���ƶ��ڵ�����������������ܸ�����Ҫ�ı�����λ�á���ˣ��ƶ��ڵ�ļ������ΪĿ�����Ӧ���ṩ�µĽ�����������Ķ�Ŀ����ƶ�ʽ��λ���ٷ��������˴������У�ͨ���ȽϺ��ܽᣬָ��������ڵ��������Ⲣָ����δ�����о�������Щ������̽����Ϊ�Ժ���о��ṩ�м�ֵ�IJο���
�ο����ף�
[1] AKYILDIZ I F, SU W, SANKARASUBRAMANIAM Y, et al. Wireless sensor networks: a survey[J]. Computer Networks, 2002, 38(4): 393-422.
[2] ���Ļ�, ����, ��Ⱥ, ��. ��������ʱ�������ƶ�ʽ�����ռ���������[J]. ������о��뷢չ, 2016, 53(11): 1-19.
WANG Wenhua, WANG Tian, WU Qun, et al. Survey of delay-constrained data collection with mobile elements in WSNs[J]. Journal of Computer Research and Development, 2016, 53(11): 1-19.
[3] ���, �ߺ�. ���ߴ�����������о���չ[J]. ������о��뷢չ, 2008, 45(1): 1-15.
LI Jianzhong, GAO Hong. Survey on sensor network research[J]. Journal of Computer Research and Development, 2008, 45(1): 1-15.
[4] DURISIC M P, TAFA Z, DIMIC G, et al. A survey of military applications of wireless sensor networks[C]// 2012 Mediterranean Conference on Embedded Computing (MECO). Piscataway, NJ: IEEE, 2012: 196-199.
[5] WANG Tian, PENG Zhen, LIANG Junbin, et al. Detecting targets based on a realistic detection and decision model in wireless sensor networks[C]// International Conference on Wireless Algorithms, Systems and Applications. Berlin: Springer International Publishing, 2015: 836-844.
[6] LIU Xuefeng, CAO Jiannong, TANG Shaojie, et al. A generalized coverage-preserving scheduling in WSNs: a case study in structural health monitoring[C]// INFOCOM, 2014 Proceedings IEEE. Piscataway, NJ: IEEE, 2014: 718-726.
[7]  P. Human detection and tracking in healthcare applications through the use of a network of sensors: human behavior understanding in networked sensing[M]. Berlin: Springer, 2014: 171-190.
P. Human detection and tracking in healthcare applications through the use of a network of sensors: human behavior understanding in networked sensing[M]. Berlin: Springer, 2014: 171-190.
[8] ZHANG Desheng, HUANG Jun, LI Ye, et al. Exploring human mobility with multi-source data at extremely large metropolitan scales[C]// Proceedings of the 20th Annual International Conference on Mobile Computing and Networking. New York: ACM, 2014: 201-212.
[9] WANG Tian, PENG Zhen, LIANG Junbin, et al. Following targets for mobile tracking in wireless sensor networks[J]. ACM Transactions on Sensor Networks (TOSN), 2016, 12(4): 31.
[10] ����, ��ѩ, �ϵ�ΰ. ���ߴ��������綯̬�ڵ�ѡ���Ż�����[J]. ������о��뷢չ, 2015, 45(1): 188-195.
WANG Sheng, WANG Xue, BI Daowei. Dynamic sensor selection optimization strategy for wireless sensor networks[J]. Journal of Computer Research and Development, 2008, 45(1): 188-195.
[11] RAMYA K, KUMAR K P, RAO V S. A survey on target tracking techniques in wireless sensor networks[J]. International Journal of Computer Science and Engineering Survey, 2012, 3(4): 93-108.
[12] WANG Tian, JIA Weijia, WANG Guojun, et al. Hole avoiding in advance routing with hole recovery mechanism in wireless sensor networks[J]. Adhoc & Sensor Wireless Networks, 2012, 16(1/2/3): 191-213.
[13] GAO Deyun, ZHU Wanting, XU Xiaoyu, et al. A hybrid localization and tracking system in camera sensor networks[J]. International Journal of Communication Systems, 2014, 27(4): 606-622.
[14] PINO-POVEDANO S, ARROYO-VALLES R, CID-SUEIRO J. Selective forwarding for energy-efficient target tracking in sensor networks[J]. Signal Processing, 2014, 94(1): 557-569.
[15] CAIONE C, BRUNELLI D, BENINI L. Distributed compressive sampling for lifetime optimization in dense wireless sensor networks[J]. IEEE Trans on Industrial Informatics, 2012, 8(1): 30-40.
[16] XING Guoliang, LI Minming, WANG Tian, et al. Efficient rendezvous algorithms for mobility-enabled wireless sensor networks[J]. IEEE Transactions on Mobile Computing, 2012, 11(1): 47-60.
[17] AHMED R, AVARITSIOTIS J N. Mobile element based localization and tracking using path-loss model in WSNs[C]// Science and Information Conference (SAI). Piscataway, NJ: IEEE, 2014: 1023-1026.
[18] WANG Tian, PENG Zhen, CHEN Yonghong, et al. Continuous tracking for mobile targets with mobility nodes in WSNs[C]// International Conference on Smart Computing (SMARTCOMP). Piscataway, NJ: IEEE, 2014: 261-268.
[19] WANG Tian, PENG Zhen, WANG Cheng, et al. Extracting target detection knowledge based on spatiotemporal information in wireless sensor networks[J]. International Journal of Distributed Sensor Networks, 2016, DOI: 10.1155/2016/5831471.
[20] WANG Wenhua, WANG Tian, BHUIYAN M Z A, et al. Improving the localization probability and decreasing communication cost for mobile users[C]// Security, Privacy and Anonymity in Computation, Communication and Storage: SpaCCS 2016 International Workshops. Berlin: Springer International Publishing, 2016: 197-207.
[21] XIAO Qingjun, XIAO Bin, CAO Jiannong, et al. Multihop range-free localization in anisotropic wireless sensor networks: a pattern-driven scheme[J]. IEEE Transactions on Mobile Computing, 2010, 9(11): 1592-1607.
[22] HAN Guangjie, XU Huihui, DUONG T Q, et al. Localization algorithms of wireless sensor networks: a survey[J]. Telecommunication Systems, 2013, 52(4): 2419-2436.
[23] MISRA S, KAPRI N R, WOLFINGER B E. Selfishness-aware target tracking in vehicular mobile wimax networks[J]. Telecommunication Systems, 2015, 58(4): 313-328.
[24] AHMED N, RUTTEN M, BESSELL T, et al. Detection and tracking using particle-filter-based wireless sensor networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(9): 1332-1345.
[25] JINDAL A, LIU M. Networked computing in wireless sensor networks for structural health monitoring[J]. IEEE/ACM Transactions on Networking, 2012, 20(4): 1203-1216.
[26] WANG Jing, GHOSH R K, DAS S K. A survey on sensor localization[J]. Journal of Control Theory and Applications, 2010, 8(1): 2-11.
[27] BIAN G R, ZHANG H H, KONG F C, et al. Research on warehouse target localization and tracking based on KF and WSN[J]. Sensors & Transducers , 2014, 163(1): 255-261.
[28] PENG Zheng, WANG Tian, BHUIYAN M Z A, et al. Dependable cascading target tracking in heterogeneous mobile camera sensor networks: algorithms and architectures for parallel processing[C]// Algorithms and Architectures for Parallel Processing, Springer International Publishing. Berlin: Springer, 2015: 531-540.
[29] CHEN Hongyang, SHI Qingjiang, TAN Rui, et al. Mobile element assisted cooperative localization for wireless sensor networks with obstacles[J]. IEEE Transactions on Wireless Communications, 2010, 9(3): 956-963.
[30] ZHANG Shigeng, CAO Jiannong, CHEN Lijun, et al. Accurate and energy-efficient range-free localization for mobile sensor networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(6): 897-910.
[31] WIMALAJEEWA T, JAYAWEERA S K. Mobility assisted distributed tracking in hybrid sensor networks[C]// 2010 IEEE International Conference on Communications. Piscataway, NJ: IEEE, 2010: 1-5.
[32] HEINZELMAN W B, CHANDRAKASAN A P, BALAKRISHNAN H. An application-specific protocol architecture for wireless microsenor networks[J]. IEEE Transactions on Wireless Communications, 2002, 1(4): 660-670.
[33] WANG Y C, PENG W C, TSENG Y C. Energy-balanced dispatch of mobile sensors in a hybrid wireless sensor network[J]. IEEE Transactions on Parallel and Distributed Systems, 2010, 21(12): 1836-1850.
[34] TENG J, SNOUSSI H, RICHARD C. Decentralized variational filtering for target tracking in binary sensor networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(10): 1465-1477.
[35] TAN Rui, XING Guoliang, WANG Jianping, et al. Exploiting reactive mobility for collaborative target detection in wireless sensor networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(3): 317-332.
[36] LI Wenling, JIA Yingmin. Consensus-based distributed multiple model UKF for jump markov nonlinear systems[J]. IEEE Transactions on Automatic Control, 2012, 57(1): 227-233.
[37] ZHANG Bowu, CHENG Xiuzhen, ZHANG Nan, et al. Sparse target counting and localization in sensor networks based on compressive sensing[C]// INFOCOM, 2011 Proceedings IEEE. Piscataway, NJ: IEEE, 2011: 2255-2263.
[38] DEMIGHA O, HIDOUCI W K, AHMED T. On energy efficiency in collaborative target tracking in wireless sensor network: a review[J]. IEEE Communications Surveys & Tutorials, 2013, 15(3): 1210-1222.
[39] ZHOU Zhong, CUI Junhong, ZHOU Shengli. Efficient localization for large-scale underwater sensor networks[J]. Ad Hoc Networks, 2010, 8(3): 267-279.
[40] HAN Guangjie, XU Huihui, JIANG Jinfang, et al. Path planning using a mobile anchor node based on trilateration in wireless sensor networks[J]. Wireless Communications and Mobile Computing, 2013, 13(14): 1324-1336.
[41] SPLETZER J R, TAYLOR C J. Dynamic sensor planning and control for optimally tracking targets[J]. The International Journal of Robotics Research, 2003, 22(1): 7-20.
[42] ZHAN P C, CASBEER D W, SWINDLEHURST A. Adaptive mobile sensor positioning for multi-static target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(1): 120-132.
[43] WANG Xue, MA Junjie, WANG Sheng, et al. Distributed energy optimization for target tracking in wireless sensor networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(1): 73-86.
[44] CHEN Wei, FU Yinfei. Cooperative distributed target tracking algorithm in mobile wireless sensor networks[J]. Journal of Control Theory and Applications, 2011, 9(2): 155-164.
[45] FU Yinfei, YANG Le. Sensor mobility control for multitarget tracking in mobile sensor networks[J]. Int Journal of Distributed Sensor Networks, 2014(1): 1-15.
[46] PATEL N B. Target localization improving tracking accuracy and energy efficiency in wireless sensor network[D]. New York: Ahmedabad University. Amrut Mody School of Management, 2015: 1-21.
[47] YANG Zaiyue, SHI Xiufang, CHEN Jiming. Optimal coordination of mobile sensors for target tracking under additive and multiplicative noises[J]. IEEE Transactions on Industrial Electronics, 2014, 61(7): 3459-3468.
[48] MEYER F, RIEGLER E, HLINKA O, et al. Simultaneous distributed sensor self-localization and target tracking using belief propagation and likelihood consensus[C]// 2012 Conference Record of the Forty Sixth ASILOMAR Conference on Signals, Systems and Computers (ASILOMAR). Piscataway, NJ: IEEE, 2012: 1212-1216.
[49] MEYER F, HLAWATSCH F, WYMEERSCH H. Cooperative simultaneous localization and tracking (coslat) with reduced complexity and communication[C]// 2013 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). Piscataway, NJ: IEEE, 2013: 4484-4488.
[50] MEYER F, HLINKA O, WYMEERSCH H, et al. Cooperative simultaneous localization and tracking in mobile agent networks[J]. Computer Science, 2014(1): 1-15.
[51] KAMATH S, MEISNER E, ISLER V. Triangulation based multi target tracking with mobile sensor networks[C]// 2007 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE, 2007: 3283-3288.
[52] SATHYAN T, HEDLEY M. Fast and accurate cooperative tracking in wireless networks[J]. IEEE Transactions on Mobile Computing, 2013, 12(9): 1801-1813.
[53] XU Enyang, DING Zhi, DASGUPTA S. Target tracking and mobile sensor navigation in wireless sensor networks[J]. IEEE Transactions on Mobile Computing, 2013, 12(1): 177-186.
[54] GHADBAN N, HONEINE P, MOURAD-CHEHADE F, et al. Mobility using first and second derivatives for kernel-based regression in wireless sensor networks[C]// 2014 International Conference on Systems, Signals and Image Processing (IWSSIP). Piscataway, NJ: IEEE, 2014: 203-206.
[55] ALHMIEDAT T, SALEM A O A, TALEB A A. An improved decentralized approach for tracking multiple mobile targets through Zigbee WSNs[J]. International Journal of Wireless & Mobile Networks, 2013, 5(3): 61-76.
[56] MOURAD F, CHEHADE H, SNOUSSI H, et al. Controlled mobility sensor networks for target tracking using ant colony optimization[J]. IEEE Transactions on Mobile Computing, 2012, 11(8): 1261-1273.
[57] SELVARAJ K, BALAJI S. Controlled mobility sensor networks for target tracking using particle swarm optimization[C]// 2013 International Conference on Current Trends in Engineering and Technology (ICCTET). Piscataway, NJ: IEEE, 2013: 388-391.
[58] KUMAR A S, PARVIN R. Energy conserving hybrid sensor network for target tracking in wireless sensor networks[C]// 2013 International Conference on Communications and Signal Processing (ICCSP). Piscataway, NJ: IEEE, 2013: 55-59.
[59] BAI Jing, CHENG Peng, CHEN Jiming, et al. Target tracking with limited sensing range in autonomous mobile sensor networks[C]// 2012 IEEE 8th International Conference on Distributed Computing in Sensor Systems (DCOSS). Piscataway, NJ: IEEE, 2012: 329-334.
[60]  J, BOUKHATEM L, AL AGHA K. Predictive sink mobility for target tracking in sensor networks: advanced infocomm technology[C]// 5th IEEE International Conference on Advanced Infocomm Technology (ICAIT).Vincent G. Berlin: Springer, 2013: 283-295.
J, BOUKHATEM L, AL AGHA K. Predictive sink mobility for target tracking in sensor networks: advanced infocomm technology[C]// 5th IEEE International Conference on Advanced Infocomm Technology (ICAIT).Vincent G. Berlin: Springer, 2013: 283-295.
[61] WANG Guojun, BHUIYAN M Z A, CAO Jiannong, et al. Detecting movements of a target using face tracking in wireless sensor networks[J]. IEEE Transactions on Parallel and Distributed Systems, 2014, 25(4): 939-949.
[62] Bhuiyan M Z A, WANG Guojun, VASILAKOS A V. Local area prediction-based mobile target tracking in wireless sensor networks[J]. IEEE Transactions on Computers, 2015, 64(7): 1968-1982.
(�༭ �Կ�)
�ո����ڣ�2016-03-10�������ڣ�2016-06-03
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61672441)�����ҿƼ�֧�żƻ���Ŀ(2015BAH16F00/F01/F02) (Project(61672441) supported by the National Natural Science Foundation of China; Project(2015BAH16F00/F01/F02) supported by the National Key Technology Support Program)
ͨ�����ߣ������ʿ�������ڣ��������ߴ��������磬�ƶ����㣬�罻������о���E-mail: cs_tianwang@163.com
ժҪ������Ŀ����ٵĹ����Լ��ƶ����ٵ��ص㣻ͨ������Ŀ�궨λΪ���ķ�����Ŀ��̽��Ϊ���ķ��������ܶ�λΪ�����ƶ�ʽĿ����ٷ���(��ΪĿ����ƶ�ʽ��λ����)���о���״�������ͱȽϲ�ͬ�������ص��Ӧ�����������з�����Ȼ������߸����������������������ܺģ����ǻ�����һЩ���⡣���ڴˣ��ܽ�Ŀ����ƶ�ʽ��λ���ٷ����ڷ������͡�����ṹ�ͽڵ�ģ�͵ȷ�����ܴ��ڵ��о��ȵ㣬ָ�����о��ͷ�չ���ơ�
