
���������˵�������ר��ģ������
�� ��1, ����ƽ1, ����Ӣ2
(1. ���ϴ�ѧ ��Ϣ��ѧ�빤��ѧԺ, ���� ��ɳ, 410083
2. ���ݴ�ѧ ʵ������, �㶫 ����, 510405)
ժ Ҫ��
�Ĵ������������ҵ����, ����ҵ�����ͼ��������������Ӱ��, ����δ֪�ԡ� ����ԡ� �����Ե����ԡ� ��Ըø��ӿ��ƹ���, ����һ�ֻ���������ר��ģ�����Ƶ�·�����ٿ��Ʒ���, ������Ĵ����������ߡ� �÷����ο��Ĵ�����ת���˶�ѧ����, ������������˹�����������ҵ����, ���Ĵ������˹�������������Ϊר�ҹ���, ����ר��ϵͳ, ʵ�ֻ����������ٶȺͷ�λ�ǵıջ�����; ���þ��Ե������ܵ�ģ���㷨, ������Ĵ���������˵��� ���Ĵ��ٶȽ��п��ơ� ��������֤�˸÷����Ŀ����Ժ���Ч�ԡ�
�ؼ���: ���; ������; ������; ר��ģ������
��ͼ�����:B160 ���ױ�ʶ��:A ���±��: 1672-7207(2005)06-1059-05
Self-adjustable expert fuzzy control of deep ocean mining robot
CHEN Feng1, WANG Sui-ping1, HAN Xiao-ying2
(1. School of Information Science & Engineering, Central South University, Changsha 410083, China
2. Experiment Center, Guangzhou University, Guangzhou 510405, China)
Abstract: Infulenced by environment and mining robot itself, deep seabed autonomous tracked mining robot has characteristics of being unknown, random and nonlinear, etc. In this paper, a self-adjustable expert fuzzy controller was presented to control deep seabed autonomous tracked mining robot and follow specified path. Based on tracked vehicle kinematical equation, combining deep seabed tracked mining robot working parameters and condition, some manual control experiences are intergrated as expert rule to realize its speed and azimuth closed-loop control. An adjustable fuzzy controller is used to control right and left tracked speed. Simulation results verify its feasibility and validity.
Key words: deep seabed; robot; self-adjust; expert fuzzy control
����������˶�ֲ���3~6km����ױ��㡣 ��6km��ĺ���, ѹǿ�ߴ�60 MPa, �˲�����ֱ�ӵ������в����� ���������˲��ø�ѹˮ�����Ժ��Ķ������˽��вɼ�, ������ѡ�����鴦����, �Ը�ѹˮ��ͨ�����ܽ������͵��м�ա� Ȼ��, ͨ��6 km���Թܵ�, ���ñ��͵ķ�ʽ�����͵�����IJɿ�, ����һ����������������ˮ��ͨ��һ�����ܵ��ŷŵ�������һ�����, ������ȵؼ�����Ⱦ�� ����������ں�����ҵ������, ���ܵ���ҵ�����������������ѧ���Ա仯�� ��ײ���״���� ������������Ŷ��������������������ϵͳ�ķ����ԡ� ���ͺ�ʱ�����Եȵ�Ӱ�졣 ��Щ�����ڼ���������ϵ�Ӱ�����δ֪�ԡ� ����ԡ� �����Ժ�ʱ�������, �������ָ��ӿ��ƹ���, ���ó�������㷨���Ѵﵽ�����Ҫ��[1-4]�� ��ģ�����Ƽ�������Խ�����ڲ���Ҫ֪ �����ӵ���ѧģ��, ֻ����ݾ������ʵ�ֿ��ơ� ���ڼ�������˹���������������IJ�ȷ����, ��ģ�����Ʋ���������Ҫ��[5], �ڴ�, �������߲��û���������ר��ģ�������㷨�Լ�������˽��п���, ����MATLAB���з���ʵ�顣
1 ����������������������ר��ģ������
1.1 �Ĵ����������������ר��ģ������
�Ĵ�����ֻ��ͨ���� ���Ĵ����ٶȲ�ʵ��ת�� ����ת������ĺ���Ħ�����ɳ��������ٶȺͽ��ٶȹ�ͬ����, ������ƽ�ⷽ�̱���Ϊ���ɻ���Լ��, ����Ĵ�����·���滮��·�����ٿ���֮��������, ʹ���Ĵ�������ʽ��������������߸������ѡ� ��Ĵ���������˹�����6 km����, �ܵ������������ѧ���Լ���������Ŷ���Ӱ��, ���Ƹ�Ϊ���ѡ� �Ĵ��������˹����������Ƚϳ���, ������Ա(ר��)�ɸ��ݾ�������Ĵ�����Ԥ���켣����[6]�� ���ォ�Ĵ������˹�������������Ϊר�ҹ���, �ο��Ĵ�����ת��ʱ���˶�ѧ����, ����ר��ϵͳ, ���ݺ����ƫ����ٶ�ƫ��, ʵʱ������ ���Ĵ��ٶȡ� ������ר�ҹ�����ڼ���������ٶȵĿ���δ�ܹ����� ���Ĵ��ٶȱջ�, ����ʵ�ֶ��� ���Ĵ��ٶȾ�ȷ���ڡ� �����������˲���Һѹ����, Һѹ�������Ĵ���������Ϊǿ�ҵķ����Ժ��ͺ���, ���ó���Ŀ���ϵͳ���Ѵﵽ��Ҫ��[7]�� ģ�������㷨����Ҫϵͳ��ѧģ��, �ܹ��Ը��ӷ�����ϵͳʵ�־�ȷ���ơ� ���ڵ��ڵĿ����Ժ;�ȷ��, ���ﹹ����һ��������ģ��������, �����ٶȱջ�, ʵʱ���Ƽ���������� ���Ĵ��ٶȡ� ���ƽṹ��ͼ1��ʾ, ����: ��0Ϊ�Ĵ����������; v0Ϊ�����ٶ�; ����v�ֱ�Ϊ����Ǻ��ٶȵļ��ֵ; vL��vR�ֱ�Ϊ�� ���Ĵ�����ٶȡ� ����������˰�����·������ʱ, �����߷�����ٶȴ���ƫ��, ������ͨ��ר��ϵͳ��һ����������� ���Ĵ��ٶ��趨ֵ, Ȼ��, ͨ��ģ������������ ���Ĵ��ٶȽ��е�����
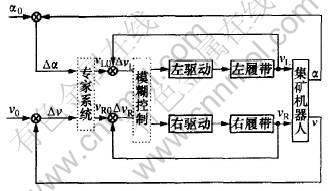
ͼ 1 �������������ȫ�Զ�����ԭ��ͼ
Fig. 1 Mining robot expert-fuzzy control for path-tracking
1.2 �Ĵ�����ת��ʱ���˶�����
�Ĵ�����ˮƽת��ʱ, �ɿ���Ϊ��ά�˶�ģ��[8]�� �� ���Ĵ��ٶȷֱ�ΪvL��vRʱ, ������������ĵ�ǰ���ٶȿɽ��Ʊ���Ϊ:
![]()
���������ת��Ľ��ٶȿɽ��Ʊ���Ϊ:
![]()
����: BΪ�Ĵ����ľࡣ ����,
vL=v+��B/2;(3)
vR=v-��B/2��(4)
������������ĵ�λ��Ϊ:
x=��v(t)cos��(t)dt;(5)
y=��v(t)sin��(t)dt��(6)
1.3 �Ĵ����������ר��ϵͳ����
�������Ϊ��ϡ������, �Ĵ��������Ҵ��ʲ���ȷ��, �����Ĵ������˶�����ֻ�ܶ��Ա�ʾ����Ĵ���������˵��˶�״̬, ���ܾ�ȷ���������˶�״̬���� ���Ĵ�ʵ���ٶ�֮��Ĺ�ϵ�� �ο��˹���ʻ������ԭ��[9], �ڴ�����˸��ݺ����ƫ����� �ٶ�ƫ�v������ ���Ĵ��ٶȵ���ֵvL0��vR0��ר�ҹ���, ����������¡�
a. �v��Ϊ��λ��ƫ���Ӧ�������Ĵ��ٶȵ���ֵ, ��Է�λ�����, �����¹���Ԧ�v�����е���:
��|����|��1��, ��v��=10sin����;
��|����|��5��, ��v��=50sin����;
��|����|��15��, ��v��=200sin����;
��|����|��180��, ��v��=900sin������
b. �����ٶ�ƫ�v�����ٶȵ���ֵ��v�������� ���Ĵ��ٶ�:
vL0=v0+��v+��v��;(7)
vR0=v0+��v-��v����(8)
2 ���������
����Ĵ����������ΪȫҺѹ����, ����ǿ�ҵķ���������, ���û���ģ�͵Ŀ����㷨����ȡ�þ�ȷ�Ŀ���Ч���� ģ���������ܿ˷����������ص�Ӱ��, �Ե��ڶ���IJ����н�ǿ��³���ԡ� ģ���������Ա����������E�����ı仯��EcΪ���롢 ��UΪ������������Թ����, ��Щ����Ľ������Բ����ߵľ����ʵ������Ϊ����[10]�� Һѹϵͳ����ǿ�ҵķ����Ժ��ͺ���, �����ܽ�������ľ���, Ҫʵ�ֶ��� ���Ĵ��ٶȵľ�ȷ����, �ͱ������ܹ�������������ģ�����ơ� ���ڹ�������µļ������������ģ������ϵͳ�ṹ��ͼ2��ʾ��
���ڹ�������µ�ģ�����ƹ��������ʽ����:
U=��E+(1-��)Ec��(9)
����: 0���¡�1, ��Ϊ��Ȩ���ӻ���������, ��������������������ʶԻ�ÿ���������ļ�Ȩ�̶ȡ� ����ϵͳ�ڲ�ͬ��״̬��, �Կ��ƹ��������E�����仯��Ec�ļ�Ȩ�̶��в�ͬ��Ҫ�� �����ϴ�ʱ, ����ϵͳ����Ҫ�������������, ��ʱ�����ļ�ȨӦ�ô�Щ; �����Сʱ, ����ϵͳ����Ҫ������ʹϵͳ�����ȶ�, ��С����, ��ʱҪ���ڿ��ƹ��������仯�ʵļ�Ȩ��Щ��
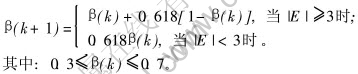
Ϊʵ�֦µ����ߵ���, �����˳�ѧ�еġ���ѡ����������������[11, 12], ��

ͼ 2 ���ڹ�������ļ������������
ģ������ϵͳ�ṹ
Fig. 2 Fuzzy control system structure of self-propelled mining robot based on rule parameter
���㷨��, ϵͳ����Ϊ: e(k)=y(k)-r��
��EΪ�����Ա���, ����Ϊ[-6, +6]�� ���ı仯��![]() (��Ec��ʾ)����Ϊ:
(��Ec��ʾ)����Ϊ:
![]()
Ec������Ϊ[-3, +3]��
����E�Ĵ�С, �Ԧ�(k)����������ѧϰ, �Ӷ��Զ��ı��� ���仯�ʵIJ�ͬ��Ȩ, �ﵽ�����Զ��������ƹ����Ŀ�ġ�
3 ���ƹ���������ר��ģ���㷨�ķ���
���ƹ���������ר��ģ���㷨����ϵͳ����ͼ��ͼ3��ʾ[13, 14]��
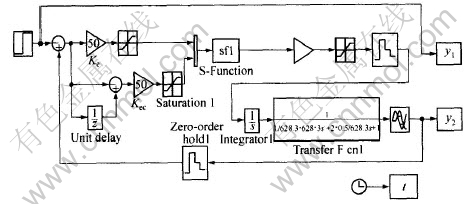
ͼ 3 �Ĵ�Һѹϵͳ������ר��ģ���������ϵͳ
Fig. 3 Self-adjustable expert fuzzy rule simulation system of track hydraulic pressure control
ͼ3��, ϵͳ����Fuzzy����, ͨ��e��Ke, ec��Kec�ֱ����e�� ���仯��ec(��ȷֵ)������������������[15]�� ͬʱ, Ϊ����һ��ģ����, ���� ȡ������, �ֱ�õ�������ֵE��Ec�� ϵͳ���÷�ģ������, ͨ��KuU*��������������ֵ������Ϊ��ȷֵ, �õ�ʵ�ʵĿ�����u��
����MATLAB����������ͼ3��ʾ�ķ���ϵͳ, ��������ά������ѡ���Ĵ��������ӵĿ��ƹ���������ר��ģ���㷨���з����о��� ͼ3��,S-function��ģ������ϵͳ�д��������ӵĿ��ƹ����������㷨ģ��[16]�� ���ض�����þ��д��ͺ�ļ���������Ĵ�Һѹ����ϵͳ, ������õ�λ��Ծ�ź�, ��������ͼ4��ʾ��
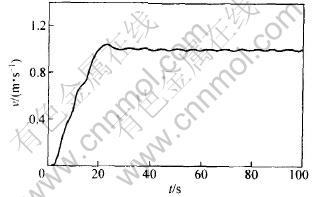
ͼ 4 ����ģ��������������ר��ϵͳ�ķ�����
Fig. 4 Simulation result based on self-modify fuzzy rule and expert system
ͼ4��ʾ�ķ��������Ա���, ���ö�ά������ѡ���Ĵ��������ӵĿ��ƹ���������ר��ģ���㷨����ϵͳ, �ﵽ������Ϊ: ����ʱ��С��18 s(�ﵽ�ο�ֵ��95%), ����ʱ��С��18 s, ������С��3.5%, ��̬���С��0.5%, ϵͳ���м�����, �������С��0.5%, ���ؽ����˼�����ϵͳ���ܵ�Ӱ��, ����ϵͳ�Ŀ���Ҫ��
4 �� ��
a. ��Լ�������˹��������Ķ�����ص�ͼ�������˿���ϵͳ�ĸ�������ʱ���ԡ� �����ԡ� ���ͺ���ص�, ������ƹ���������ר��ģ�����Ʋ��ԡ�
b. ����MATLAB���з���, �������, ���ø÷��������ϵͳ�Ŀ��ƾ���, �����������Աȳ���ģ���������ܺ�, �����ڸ��ٸ���ֵ�� �����Ŷ�����, ����Ч�����Ϻá� ���о�������Ĵ����������˶�����Ҳ����һ����ָ�����塣
�����:
[1]Deepak C R, Shajahan M A, Atmanand M A. Developmental tests on the underwater mining system using flexible riser concept[A]. The 4th ISOPE OMS Proceeding[C]. Hangzhou, 2001. 105-108.
[2]Handschuh R, Grebe H, Panthel J. Innovative deep ocean mining concept based on flexible riser and self-propelled mining machines[A]. The Forth ISOPE OMS Proceeding[C]. Hangzhou, 2001. 25-29.
[3]����ƽ. COMPACT-PCI IPC �����������ҵ����������ϵͳ[J]. ���㼼�����Զ���, 2002, 2: 37-39.
WANG Sui-ping. COMPACT-PCI IPC using in deep seabed mining vehicle in two grade control system[J]. Computing Technology and Automation, 2002, 2: 37-39.
[4]ë����. ����DZ�ڵĿ����Դ�뿪��ǰ��[J]. ����, 1998(5): 17-20.
MAO Lin-rui. Potential mining resource and development prospect of ocean[J]. Earth, 1998(5): 17-20.
[5]�����. ����������Ӧģ��������[J]. �й���ѧE��, 1999, 29(1): 32-42.
LI Hong-xing. Variable field about the adaptive fuzzy controller[J]. 1999, 29(1): 32-42.
[6]Merhof W, Hackbarth M. �Ĵ�������ʻ��ѧ[M]. ��ѩ��, ��٩, ������, ��. ����: ������ҵ������. 1989.
Merhof W, Hackbarth M. Tracked vehicle walking mechanics[M]. HAN Xue-hai, LIU Kan, ZHOU Yu-long, translated. Beijing: Press of National Defense Industry, 1989.
[7]���ǿ, ������. ������Һ���������ܿ���ϵͳ[M]. �Ϻ�: �Ϻ���ѧ�������׳�����, 1997.
WU Guang-qiang, WANG Hui-yi. Quiet Liquid Vehicle Driven and Intelligent Control System[M]. Shanghai: Press of Scientific Technical Literature of Shanghai, 1997.
[8]Wong J Y. Theory of ground vehicles[J]. New York: J Wiley, 1991.
[9]������. ���泵��ԭ��[M]. ���, �µ���, ����ѧ, ��. ����: ��е��ҵ������, 1983.
HUANG Zu-yong. Ground Vehicle Principle [M]. LI Chang-gu, CHEN De-xing, LIU Shu-xue, translated. Beijing: Press of Mechanical Industry, 1983.
[10 ]������, ������, ��괺. ����DADS���Ĵ���������ģ�������[J]. ϵͳ����ѧ��, 2002, 11(14): 1531-1532.
HAN Bao-kun, LI Xiao-lei, SUN Feng-chun. Tracked vehicle multi-modeling and simulation based on DADS[J]. Systematic Emulation Journal, 2002, 11(14): 1531-1532.
[11]������, ������, ����ʯ. ����λ��ͬ��ϵͳ�Ĺ������������ģ������[J]. ��е�����, 1999, 5: 13-14.
WANG Shi-ming, HUANG Yong-qing, LI Tian-shi. Principal and subordinate position synchronous systematic regular parameter adjustable fuzzy control[J]. Machinery and Electron, 1999, 5: 13-14.
[12]���, ������, �ν���. ����Matlab���ʽ��ģ������ϵͳ���漰���ӻ�ʵ��[J]. ���������, 2002, 19(3): 113-116.
YU Jie, QIN Shi-ying, DUAN Jian-min. Fuzzy control system simulation and realize visually based on Matlab order[J]. Computer Simulation, 2002, 19(3): 113-116.
[13]�Ƴɾ�, ����, ��ƽ, ��. ����ģ����������Ŀ���ϵͳ���������[J]. ���������, 2003, 20(2): 75-78.
HUANG Cheng-jing, WANG Lin, MA Ping, et al. Control system computer emulation on the basis of fuzzy logic toolbox [J]. Computer Simulation, 2003, 20(2): 75-78.
[14]Takagi T, Sugeno M. Fuzzy Identification of system and Its application to modeling and control[J]. IEEE Trans Syst Man Cyber, 1985, 15: 116-132.
[15]���Ĺ�, ������, ������. ����MATLAB(SIMULINK)���Ե�ģ������ϵͳ�о�������[J]. ���������, 2001, 18(3): 15-16.
LUO Wen-guang, HAN Jun-feng, LAN Hong-li. Fuzzy control system based on MATLAB(SIMULINK) language studies advanced emulation[J]. Computer Simulation, 2001, 18(3): 15-16.
[16]�. ģ������ԭ����Ӧ��[M]. ����: ��е��ҵ������, 1995.
ZHU Jing. Fuzzy Control Principle and Application[M]. Beijing: Press of Mechanical Industry, 1995.
�ո�����:2005-01-10
������Ŀ: ������Ȼ��ѧ����������Ŀ(60505018); ���Һ��������о�������ʮ�塱��Ŀ(DY-105-03-02-06); �����ص�����о���չ�滮��Ŀ(2002CB312203)
�����: �� ��(1977-), ��, ����������, ��ʿ, ���»����ˡ� �˹������о�
������ϵ��: �� ��, ��, ��ʿ; �绰: 0731-8830394(O) ; E-mail: chfcsu@yahoo.com.cn
ժҪ: ����������Ĵ������������ҵ����, ����ҵ�����ͼ��������������Ӱ��, ����δ֪�ԡ� ����ԡ� �����Ե����ԡ� ��Ըø��ӿ��ƹ���, ����һ�ֻ���������ר��ģ�����Ƶ�·�����ٿ��Ʒ���, ������Ĵ����������ߡ� �÷����ο��Ĵ�����ת���˶�ѧ����, ������������˹�����������ҵ����, ���Ĵ������˹�������������Ϊר�ҹ���, ����ר��ϵͳ, ʵ�ֻ����������ٶȺͷ�λ�ǵıջ�����; ���þ��Ե������ܵ�ģ���㷨, ������Ĵ���������˵��� ���Ĵ��ٶȽ��п��ơ� ��������֤�˸÷����Ŀ����Ժ���Ч�ԡ�
[3]����ƽ. COMPACT-PCI IPC �����������ҵ����������ϵͳ[J]. ���㼼�����Զ���, 2002, 2: 37-39.
[4]ë����. ����DZ�ڵĿ����Դ�뿪��ǰ��[J]. ����, 1998(5): 17-20.
[5]�����. ����������Ӧģ��������[J]. �й���ѧE��, 1999, 29(1): 32-42.
[6]Merhof W, Hackbarth M. �Ĵ�������ʻ��ѧ[M]. ��ѩ��, ��٩, ������, ��. ����: ������ҵ������. 1989.
[7]���ǿ, ������. ������Һ���������ܿ���ϵͳ[M]. �Ϻ�: �Ϻ���ѧ�������׳�����, 1997.
[8]Wong J Y. Theory of ground vehicles[J]. New York: J Wiley, 1991.
[9]������. ���泵��ԭ��[M]. ���, �µ���, ����ѧ, ��. ����: ��е��ҵ������, 1983.
[10 ]������, ������, ��괺. ����DADS���Ĵ���������ģ�������[J]. ϵͳ����ѧ��, 2002, 11(14): 1531-1532.
[11]������, ������, ����ʯ. ����λ��ͬ��ϵͳ�Ĺ������������ģ������[J]. ��е�����, 1999, 5: 13-14.
[12]���, ������, �ν���. ����Matlab���ʽ��ģ������ϵͳ���漰���ӻ�ʵ��[J]. ���������, 2002, 19(3): 113-116.
[13]�Ƴɾ�, ����, ��ƽ, ��. ����ģ����������Ŀ���ϵͳ���������[J]. ���������, 2003, 20(2): 75-78.
