
DOI: 10.11817/j.issn.1672-7207.2016.11.016
���ڹ�Ӭ�Ż��㷨��PID�����������Ӧ��
�������������ң���С��
(����ũҵ��ѧ ��ѧԺ������ ���ݣ�730070)
ժ Ҫ��
N���õ���PID���������Ի�����ŵĿ������ܣ����һ�ֻ��ڹ�Ӭ�Ż��㷨��PID�����������Ż��ķ�������Ӭ�Ż��㷨���п��Ʋ����١�ʵ�ּ��Ż��������õ��ŵ㣬���ô��㷨��Ƴ�PID����������Z-N�����Ŵ��㷨��Ƶ�PID���������бȽϡ���������������Ӭ�Ż��㷨��PID��������Z-N�����Ŵ��㷨��PID���������ý�����ţ����Ŵ��㷨���нϿ�������ٶȣ���Ӧ���ڻ���һ��������ϵͳ���ȶ��������⣬�ﵽ�ϺõĿ���Ч����
�ؼ��ʣ�
��Ӭ�Ż��㷨��PID���������������������ε�������
��ͼ����ţ�TP391 ���ױ�־�룺A ���±�ţ�1672-7207(2016)11-3729-06
Design and application of PID controller based on fruit fly optimization algorithm
ZHAO Xiaojun, LIU Chengzhong, HU Xiaobing
(College of Engineering, Gansu Agricultural University, Lanzhou 730070, China)
Abstract: The PID parameter obtained from the traditional Z-N method is difficult to receive the optimal control performance. Therefore, a method for parameter optimization of PID controller based on Fruit fly Optimization Algorithm was proposed, which has less control parameters, simple operation and good optimize performance. Then, We the performance of the PID controller designed by this algorithm with that designed by the Z-N method and genetic algorithm were compared. The simulation results show that the PID controller base on Fruit fly Optimization Algorithm is better than the Z-N method and genetic algorithm, and has a faster convergence speed than the genetic algorithm, and the stability control problem of circular inverted pendulum system by using this PID controller achieves good control effect.
Key words: fruit fly optimization algorithm; PID controller; parameters tuning; rotary inverted pendulum
PID������Ϊ���緢չ�����Ŀ��Ʋ���֮һ������ƫ��ı���(P)������(I)����(D)����[1]����������ƽṹ��ʵ�����ס�����Ч���Ϻá�³����ǿ�Ϳɿ��Ըߣ��ڹ�ҵ���̿����еõ��˹㷺��Ӧ�ã���ȡ���˺ܺõľ���Ч��������PID�������IJ����Ż�һֱ�����Ź��̼�����Ա��ͨ���˹���ʵ�ʾ�����е��������ַ���������ʱ�����������������Ҫ�����PID�������IJ���������Ϊ�����ǹ�ע�����⡣���������ܼ����ѧ�Ŀ��ٷ�չ�����������Ż��㷨������Ⱥ�㷨(ACO)[2]��������ѧϰ�㷨[3]���Ŵ��㷨(GA)[4-6]������Ⱥ�㷨(PSO)[7-8]��Ӧ�õ�PID���������У�ͬʱȡ���˱ȴ�ͳ������Ϊ����Ľ����������Щ�����Ż��㷨����ijЩ���㣬��������ѧϰ�㷨��һЩ����ѡ��û��ϵͳ�ķ���������Ԫ�ĸ��������������Ŀ�Լ���ʼȨֵ���Ŵ��㷨���ڹ�������������������ǿ��ȱ�ݣ�����Ⱥ�㷨���ö����ֵ��Ż����̡��������߳��Բ��ù�Ӭ�Ż��㷨�Ż�PID������ΪPID�������������ṩ����;������Ӭ�Ż��㷨��Դ�ڶԹ�Ӭ��ʳ��Ϊ�ķ��գ�����2011��6�������ij������һ��ȫ�µ��ݻ�ʽ�Ż��㷨[9]��������Ⱥ�����Ż��㷨��Ƚϣ���Ӭ�Ż��㷨���������㷨�������������ʵ�֡���������������Ž���ŵ㣬���ұ�������Ⱥ�����㷨�����IJ����١��������Խ�������ĸ��ӹ�ϵ�о��������ѡȡ���ʵIJ�������ֱ���漰���㷨���Ż����ܣ����һ�����㷨���Ӷȷ������Ѷȣ���˲��ù�Ӭ�Ż��㷨��Ƶ�PID���������ܹ��ڲ�����ѡȡ�ϼ���һЩ���š����ҹ�Ӭ�Ż��㷨������ʱ����٣����Լ��ټ��㸴�Ӷȡ�
1 PID������
PID������Ϊһ�־���ʹ�õĴ�����������ʽ���Ƕ����������ź� ���б����������Լ��ֵļ�Ȩ����ó������ź�
���б����������Լ��ֵļ�Ȩ����ó������ź� �������ܿض���ģ��[10]��PID��������һ����ʽΪ
�������ܿض���ģ��[10]��PID��������һ����ʽΪ
 (1)
(1)
ʽ�У�Ϊϵͳ����źţ�Kp��Ki��Kd�ֱ�Ϊ���������ֺ��ֵ�ϵ������3��ϵ���и��Ե��������壬��������ֱ����Ӧ�ڵ�ǰ������źţ�Kp�ϴ���ƫ���С�������ǵ����켣������Kp������������ջ�ϵͳ�IJ��ȶ������ֿ��ƶ�����������źŷ������ã��ܹ�������̬��Ki�Ĵ�С��Ӱ��ϵͳ�ij�������ϵͳ��Ӧ������ֵ̬���ٶȡ��ֿ��ƶ����ı仯�ʷ������ã�����һ����Ԥ�����ܣ�Kd�Ĵ�СӰ��ϵͳ����Ӧ�ٶȺ͵���ʱ�䡣
2 ����FOA��PID���������
2.1 ��Ӭ�Ż��㷨
��Ӭ�Ż��㷨���ݹ�Ӭ��Խ�������������Ӿ����ԣ�����Ѱʳ���̽��з���ģ�⣬�������һ��ȫ���Ż��������·�������Ӭ����������ܹ��Կ�����Ʈ���ĸ�����ζ��������ǿ�ĸ�֪����������������������ʳ����Χ����ͨ��������Ӿ����ʳ���ͬ�飬�Ӷ��ܹ�˳���ط���Ŀ��[11]��
��Ӭ�Ż��㷨�Ļ���˼�룺���ݹ�Ӭ��Խ��������ٶ�ʳ���������������Ӭ��ʳ��֮��ľ�����ʳ���ζ��Ũ����أ�������Խ������ζ��Ũ��Խ��Ӭ����ʳ���ʵ�ʹ��̾����佥���ش�ζ��Ũ�ȵ���λ�÷���ζ����Ũ��λ�õĹ���[12-13]��
���ݹ�Ӭ�Ż��㷨(FOA)����ʳ����������ԣ�����ſ�Ϊ���¼������衣
1) ��ʼ�����趨Ⱥ���ģSizepop������������Maxgen���Լ����������ӬȺ��ij�ʼ����λ��Xaxis��Yaxis��
2) ������Ӭ�����������Ѱ��ʳ��������������롣
 (2)
(2)
3) ��Ϊû�а취��֪ʳ���λ�ã������ȼ����Ӭ������ԭ��֮��ľ��� ��������ζ��Ũ���ж�ֵSi��
��������ζ��Ũ���ж�ֵSi��
 (3)
(3)
 (4)
(4)
4) ��ζ��Ũ���ж�ֵSi����ζ��Ũ���ж�����(�������Ӧ�Ⱥ���)�У��Ӷ��õ���Ӭ�����ζ��Ũ�� ��
��
 (5)
(5)
5) �Ӹù�ӬȺ�����ҵ�ζ��Ũ�����ŵĹ�Ӭ���塣
 (6)
(6)
6) ��¼������������ζ��Ũ��bbestSmell����X��Y���꣬��ʱ���ӬȺ�������Ӿ����λ�÷�ȥ��
 (7)
(7)
7) �������Ѱ�ţ�������2)~5)ѭ�����У��жϵ�ǰ���ζ��Ũ���Ƿ�����ǰһ�������ζ��Ũ�ȣ����ҵ�ǰ���������Ƿ�С����������MMaxgen��������ִ�в���6)��
2.2 ��Ӭ�Ż��㷨��PID�����������Ż�
Ŀǰ����Ӭ�Ż��㷨(FOA) ��Ӧ�ý�Ϊ�㷺���������ں����Ż���֧�������ع�����Ż��������緽����о��Ӧ�ü�ֵ�����ڹ�Ӭ�Ż��㷨���������������ģ�������֪ʶ�������о����У���Ӧ�÷�Χ������һ����չ[14]��
1) ����ָ�ꡣ��PID���������Ż���������Ϊ���ҵ�1��Kp��Ki��Kd����ʹijЩ����ָ��ﵽ���ţ�ͨ������ָ���ж��ҵ��IJ����Ƿ���Ϊ���ʣ���ˣ�����ϵͳ������ָ����Ϊʶ��PID���������ӵĸ��ݡ����õ�����ָ����MSE��ISE��IAE��ITAE����ʽ��ʽ(8)��ʾ�����ò�ͬ������ָ�꣬�Է�ӳ�Ż�PID���������еIJ�ͬ���ص�[15]��
 (8)
(8)
2) �����㷨����ʵ�����룬����PID����Ѱ���еĹ�Ӭ�������ΪKp��Ki��Kd����Ӭ�Ż��㷨����PID��������������������¡�
Step 1����ʼ��������Ⱥ���ģ�����������������������ӬȺ��λ��Xaxis��Yaxis��
Step 2��������Ӭ�������������롣
Step 3�������Ӭ������ԭ��֮��ľ���DDisti��������ζ��Ũ���ж�ֵSi��
Step 4������Ӭ�������ΪPID����������Kp��Ki��Kd�����п���ϵͳ��Simulinkģ�ͣ��õ����������Ӧ������ָ�ꡣ
Step 5������һ������õ�������ָ����Ϊ��Ӭ�������Ӧֵ�����жϸ���Ӧֵ�Ƿ������㷨ֹͣ�����������㣬�����Ż����̣������õ���ѵ�PID����������ת��Step 6��
Step 6���ӹ�ӬȺ����Ѱ�ҳ�����ζ��Ũ�ȵĹ�Ӭ���壬����¼������ζ��Ũ��bbestSmell����X��Y���꣬�����ӬȺ����������λ�á����ղ����µĹ�ӬȺ�壬ת������Step 2��
��Ӭ�Ż��㷨����PID������������������ͼ1��ʾ��
3 ������Ӧ��
3.1 ����ʵ��
��������MATLAB/Simulink�����½��з���ʵ�飬����������M���Ա��ʵ�֣�ȡ���ض���Ĵ��ݺ���Ϊ
 (9)
(9)
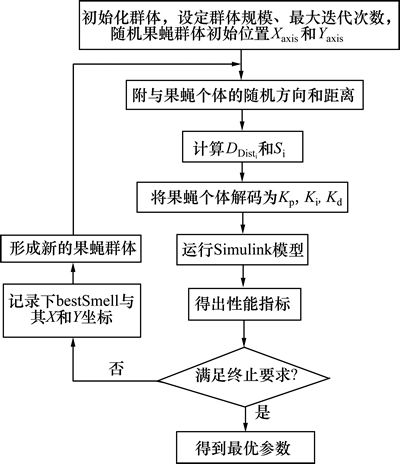
ͼ1 FOA����PID��������������
Fig. 1 FOA process PID controller parameters
��ITAE����ָ����Ϊ��Ӧ�Ⱥ���������Simulinkģ����ͼ2��ʾ��
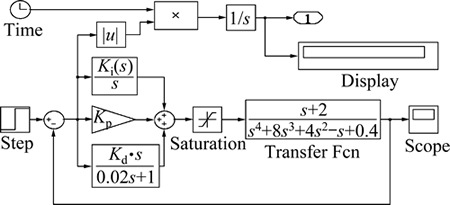
ͼ2 PID����ϵͳģ��
Fig. 2 Model of PID control system
ͼ2�У�����Ϊ��λ��Ծ��Ӧ������˿�1Ϊʽ(8)�е�����ָ�ꡣ
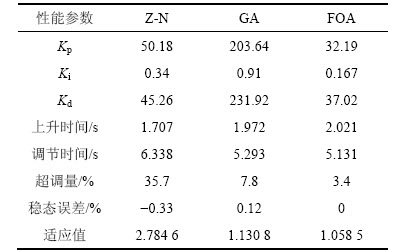
1) Ϊ����֤�����㷨�Ż�PID���������������ܣ��ֱ����Z-N�����Ŵ��㷨(GA)��Ӭ�Ż��㷨(FOA)�㷨����PID�������������Ƚ���������ض���Ľ�Ծ��Ӧ���ߡ�GA�㷨��FOA�㷨����Ⱥ��ģΪ60������������Ϊ100��GA�㷨�Ľ������Ϊ0.6���������Ϊ0.01��������PID�����У�Kp��Ki��Kd��ȡֵ������[0,300]��
��ITAEָ���£�GA�㷨��FOA�㷨�Ż�PID�����������õ������Ÿ�����Ӧֵ����������ͼ3��ʾ��
��ͼ3��֪��GA�㷨����������Ϊ89����FOA�㷨�ڵ�����35��֮��������������ղ���һ������PID����������Kp=32.19��Ki=0.167��Kd=37.02��˵�������㷨���нϿ�������ٶȡ�
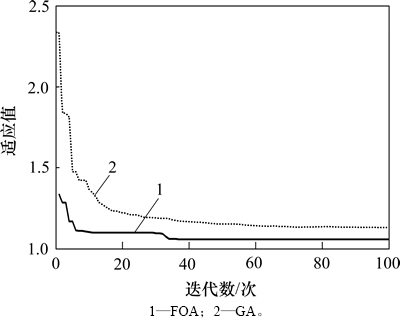
ͼ3 ��Ӧֵ�������߱Ƚ�
Fig. 3 Comparison of adaptive value convergence curve
ͼ4��ʾΪ��ITAEָ���£�Z-N����GA�㷨��FOA�㷨�Ľ�Ծ��Ӧ���ߡ�ͼ4��3�ַ����Ľ�Ծ��Ӧ�����ܲ����������1��
��ͼ4�ͱ�1��֪��Z-N�����нϿ����Ӧ���ڵ���ʱ��ͳ�������������������FOA�㷨�Ż�PID�����������ķ������ڵ���ʱ�䡢����������̬����϶�����GA�㷨���ý������������ʱ���ϣ�GA�㷨�Ľ����FOA�㷨��0.049 s���ɼ�����ITAE����ָ���£�����FOA�㷨��Ƶ�PID���������нϺõ��Ż����ܡ�
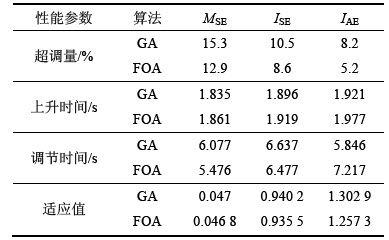
2) Ϊ�˽�һ��֤ʵ�����㷨����Խ�ԣ��ֱ���MSE��IAE��ISE 3������ָ���£�����GA�㷨��FOA�㷨���з��棬�õ��Ľ�Ծ��Ӧ������ͼ5��ͼ6��ʾ��
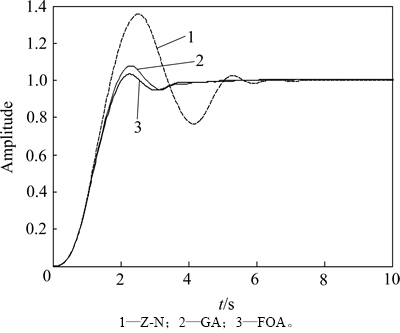
ͼ4 Z-N��GA��FOA��Ծ��Ӧ���߱Ƚ�
Fig. 4 Z-N, GA and FOA step response curve comparison
��1 PID�����������
Table 1 PID parameter tuning results
������ָ���Ϸ���ͼ5��ͼ6���ý����MSE������ʱ��͵���ʱ����3������ָ�������٣��������������ġ�ISE����Ӧ�������������ʱ�䡢����ʱ��ͳ�������������MSE��IAE֮�䡣IAEֻ���ڳ�������������������ָ�꣬��������ʱ��͵���ʱ���Ͼ����ֽ�������ˣ����Ը��ݾ���Ŀ���Ҫ����ѡ����ʵ�����ָ�꣬���ϵͳ��ϣ�����ֽϴ�����ô����ѡ��IAE��Ϊ����ָ�ꡣ����ϵͳ��Ҫ�϶̵�����ʱ��͵���ʱ�䣬�Ϳ���ѡ��MSE������ָ�ꡣ
Ϊ�˱��ڱȽϲ�ͬ����ָ����FOA�㷨��GA�㷨�Ż�PID������Ч������ͼ5��ͼ6��ʾ���������ڱ�2��
�ɱ�2��֪���ڲ�ͬ����ָ���£� FOA�㷨�ij�������С��GA�㷨�ij���������FOA�㷨������ʱ���GA�㷨������һ�㣻���⣬����IAEָ���£�FOA�㷨�ĵ���ʱ���GA�㷨��Ҫ��ʱ�������������2��ָ���£�FOA�㷨�Ľ����GA�㷨�Ͽ쵽���ȶ�״̬����ˣ�FOA�㷨������������GA�㷨��
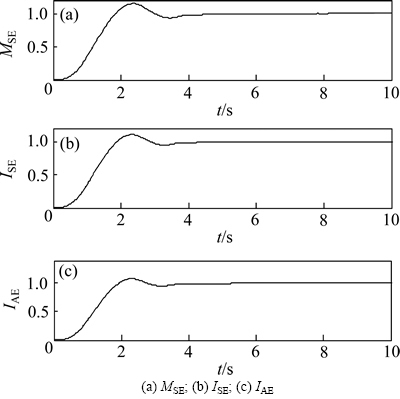
ͼ5 ��ָͬ����GA-PID�Ľ�Ծ��Ӧ
Fig. 5 Order GA-PID index under different step responses
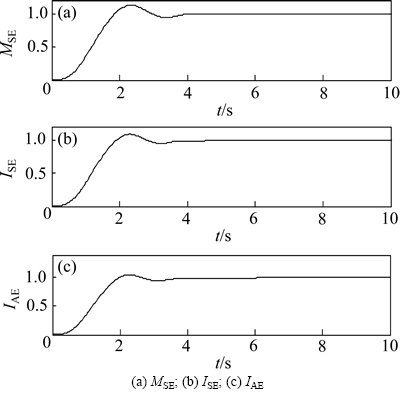
ͼ6 ��ָͬ����FOA-PID�Ľ�Ծ��Ӧ
Fig. 6 Order FOA-PID index under different step responses
��2 ��ָͬ����GA��FOA�㷨�Ż�����Ա�
Table 2 Different indicators GA and FOA algorithm to optimize result comparison
ͨ������ķ��漰�Աȷ�������Ӭ�Ż��㷨��PID�����Ż����������Ͼ���һ������Ч�Ժ���Խ�ԡ�
3.2 �ڻ��ε�����ϵͳ�е�Ӧ��
���ڷ����ԡ����ȶ��Ļ���һ��������ϵͳ����������֤���ֿ������۵�����ʵ��ģ�͡����佨����ѧģ�ͣ��ں��Կ���������ģ��֮���Ħ����������£���ϵͳ������ؼ�Ϊ1�����ˡ�1���ڸ˺�1�������飬��ͼ7��ʾ�����У� Ϊ������y��ļнǣ�
Ϊ������y��ļнǣ� Ϊ�ڸ��봹ֱ���Ϸ���ļн�(˳ʱ��Ϊ��)��
Ϊ�ڸ��봹ֱ���Ϸ���ļн�(˳ʱ��Ϊ��)��
���ε�������ƽ��λ��ʱ��������ȡֵΪ0����== =
= =0 rad����ϵͳ�������Ի��������õ�K12=37.215 2��K15=0.839 4��ȡ����[16]�е�ϵͳ�˶����̣�
=0 rad����ϵͳ�������Ի��������õ�K12=37.215 2��K15=0.839 4��ȡ����[16]�е�ϵͳ�˶����̣� �����Ǽ��ٶ���Ϊ���룬��
�����Ǽ��ٶ���Ϊ���룬�� ����ϵͳ�Ĵ��ݺ���Ϊ
����ϵͳ�Ĵ��ݺ���Ϊ
 (10)
(10)
Ϊ����֤��Ӭ�Ż��㷨����Ƶ�PID�������Ŀ������ܣ���MATLAB�жԻ���һ��������ϵͳ���з��棬���˺Ͱڸ˵���Ӧ������ͼ8��ͼ9��ʾ��
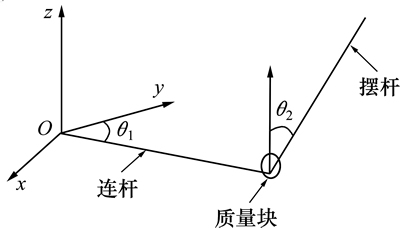
ͼ7 ����һ��������ϵͳģ��ͼ
Fig. 7 Ring of an inverted pendulum model diagram
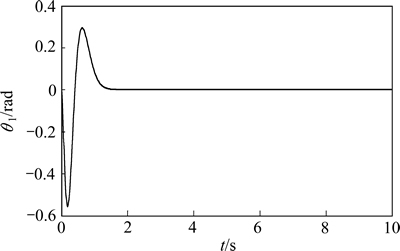
ͼ8 ���˽Ƕȵ���Ӧ����
Fig. 8 Response curve of connecting rod angle
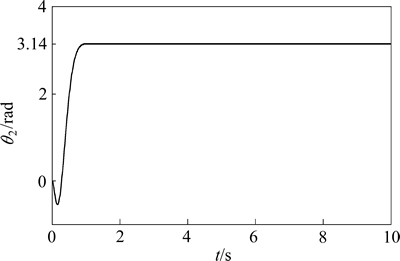
ͼ9 �ڸ˽Ƕȵ���Ӧ����
Fig. 9 Response curve of swing rod angle
��ͼ8���Կ��������˾���1�����ܹ���1.2 s���ڴﵽ�ȶ�����ͼ9���Կ������ڸ˵����ʱ��Ϊ1.0 s���ȶ���3.14 radλ��ʱ��ʱ��Ϊ1.2 s����ˣ�����������Ļ��ڹ�Ӭ�Ż��㷨��PID�������ܹ��Ϻõ���ɻ���һ�������ڵ��ȶ����ơ�
4 ����
1) ��Ӭ�Ż��㷨���������١������ٶȿ��Լ��Ż��������õ��ŵ㣬��������PID�������������Ż��ϣ������˹�Ӭ�Ż��㷨�Ż�PID�����IJ��輰���̡�
2) �Ա��ض���Ĵ��ݺ���ʽ(9)Ϊ������ITAEָ���£���Z-N����GA�㷨�ͱ����㷨�Ŀ������ܽ����˱Ƚϣ������������������㷨���ֳ����õ��Ż����ܣ�ͬʱΪ��֤�����㷨����Խ�ԣ��ֱ���MSE��IAE��ISE 3��ָ���£�ʹ��GA�㷨�ͱ����㷨���з��棬�õ��Ľ���DZ����㷨�ڲ�ͬ����ָ��������������GA�㷨��
3) �����ڹ�Ӭ�Ż��㷨��PID������Ӧ���ڻ���һ��������ϵͳ�Ŀ����У��õ��˽ϺõĿ���Ч����
�ο����ף�
[1] ����, ��־��, ����ƽ, ��. ���ڸĽ�����Ⱥ�Ż��㷨��PID����������[J]. ����������Ӧ��, 2010, 27(10): 1345-1351.
YANG Zhi, CHEN Zhitang, FAN Zhengping, et al. Tuning of PID controllers based on improved particle swarm optimization algorithm[J]. Control theory and Applications, 2010, 27(10): 1345-1351.
[2] CHIHA I, LIOUANE N, BORNE P. Multi-Objective Ant Colony Optimization to tuning PID controller[J]. International Journal of Engineering, 2009, 3(2): 11-16.
[3] MAJDABADI-FARAHANI V, HANIF M, GHOLAMINEZHAD I, et al. Multi-objective optimal design of online PID controllers using model predictive control based on the group method of data handling-type neural networks[J]. Connection Science, 2014, 26(4): 349-365.
[4] BHADURI R, BANERJEE S. Optimisation of controller parameters by genetic algorithm for an electromagnetic levitation system[J]. International Journal of Automation and Control, 2011, 5(3): 219-244.
[5] JAHEDI G, ARDEHALI M M. Genetic algorithm-based fuzzy-PID control methodologies for enhancement of energy efficiency of a dynamic energy system[J]. Energy Conversion and Management, 2011, 52(1): 725-732.
[6] AYALA H V H, DOS SANTOS COELHO L. Tuning of PID controller based on a multiobjective genetic algorithm applied to a robotic manipulator[J]. Expert Systems with Applications, 2012, 39(10): 8968-8974.
[7] MENHAS M I, WANG L, FEI M, et al. Comparative performance analysis of various binary coded PSO algorithms in multivariable PID controller design[J]. Expert Systems with Applications, 2012, 39(4): 4390-4401.
[8] SOLIHIN M I, TACK L F, KEAN M L. Tuning of PID controller using particle swarm optimization (PSO)[J]. International Journal on Advanced Science, Engineering and Information Technology, 2011, 1(4): 458-461.
[9] ����Ӣ, ������. ����Ӧ���������Ĺ�Ӭ�Ż��㷨[J]. �����������Ӧ��, 2014, 50(7): 50-51.
HAN Junying, LIU Chengzhong. Drosophila optimization algorithm with adaptive adjustment of parameters[J]. Computer Engineering and Application, 2014, 50(7): 50-51.
[10]  ZBAY H, BONNET C, FIORAVANTI A R. PID controller design for fractional-order systems with time delays[J]. Systems & Control Letters, 2012, 61(1): 18-23.
ZBAY H, BONNET C, FIORAVANTI A R. PID controller design for fractional-order systems with time delays[J]. Systems & Control Letters, 2012, 61(1): 18-23.
[11] ���ij�. Ӧ�ù�Ӭ�Ż��㷨�Ż�����ع������������ҵ��Ӫ��Ч����[J]. ̫ԭ������ѧѧ��, 2011, 29(4): 1-5.
PAN Wenchao. Enterprise operating performance evaluation algorithm of generalized regression neural network optimization and application of optimization of Drosophila melanogaster[J]. Journal of Taiyuan University of Technology, 2011, 29(4): 1-5.
[12] LI Hongze, GUO San, LI Chunjie, et al. A hybrid annual power load forecasting model based on generalized regression neural network with fruit fly optimization algorithm[J]. Knowledge- Based Systems, 2013, 37: 378-387.
[13] ISCAN H, GUNDUZ M. Parameter analysis on fruit fly optimization algorithm[J]. Journal of Computer and Communications, 2014, 2(4): 137-141.
[14] ���ܷ�. �ݻ�ʽ��Ӭ�㷨����Ӧ���о�[J]. ����������뷢չ, 2013, 23(7): 131-133.
HU Nengfa. Type of Drosophila evolution algorithm and its application[J]. Computer Technology and Development, 2013, 23(7): 131-133.
[15] �����, ������, ������, ��. �Ľ���PSO�㷨������PID���������������е�Ӧ��[J]. ���Ӳ���������ѧ��, 2010, 24(2): 141-146.
JIN Cuiyun, WANG Jianlin, MA Jiangning, et al. Improved PSO algorithm and its application in parameter tuning of PID controllers[J]. Journal of Electronic Measurement and Instrument, 2010, 24(2): 141-146.
[16] ����÷, �Ų���. ����LQR�Ļ��ε����������ȶ����Ƽ�ʵ��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(9): 3496-3501.
LIU Haomei, ZHANG Changfan. LQR rotary inverted pendulum stability control and realization based on[J]. Journal of Central South University (Natural Science Edition), 2012, 43(9): 3496-3501.
(�༭ �°���)
�ո����ڣ�2016-02-18�������ڣ�2016-04-23
������Ŀ(Foundation item)������ʡ��Ȼ��ѧ����������Ŀ(1208RJZA133)������ũҵ��ѧ���굼ʦ����������Ŀ(GAU-QNDS-201213) (Project(1208RJZA133) supported by the Natural Science Foundation of Gansu Province; Project(GAU-QNDS-201213) supported by the Youth Fund Project Supervisor of Gansu Agricultural University)
ͨ�����ߣ������ң������ڣ��������ܿ���������Ӧ�õ��о���E-mail: liucz@gsau.edu.cn
ժҪ����Դ�ͳ��Z-N���õ���PID���������Ի�����ŵĿ������ܣ����һ�ֻ��ڹ�Ӭ�Ż��㷨��PID�����������Ż��ķ�������Ӭ�Ż��㷨���п��Ʋ����١�ʵ�ּ��Ż��������õ��ŵ㣬���ô��㷨��Ƴ�PID����������Z-N�����Ŵ��㷨��Ƶ�PID���������бȽϡ���������������Ӭ�Ż��㷨��PID��������Z-N�����Ŵ��㷨��PID���������ý�����ţ����Ŵ��㷨���нϿ�������ٶȣ���Ӧ���ڻ���һ��������ϵͳ���ȶ��������⣬�ﵽ�ϺõĿ���Ч����
[9] ����Ӣ, ������. ����Ӧ���������Ĺ�Ӭ�Ż��㷨[J]. �����������Ӧ��, 2014, 50(7): 50-51.
[11] ���ij�. Ӧ�ù�Ӭ�Ż��㷨�Ż�����ع������������ҵ��Ӫ��Ч����[J]. ̫ԭ������ѧѧ��, 2011, 29(4): 1-5.
[14] ���ܷ�. �ݻ�ʽ��Ӭ�㷨����Ӧ���о�[J]. ����������뷢չ, 2013, 23(7): 131-133.
[16] ����÷, �Ų���. ����LQR�Ļ��ε����������ȶ����Ƽ�ʵ��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2012, 43(9): 3496-3501.
