
һ���¿���LMS-Newton�㷨��ˮ���ŵ������е�Ӧ��
��С�ᣬ����Ԫ����־��
(�������̴�ѧ ���ӹ���ѧԺ������ �人��430033)
ժ Ҫ��
��LMS-Newton�㷨���������㷨����ˮ���ŵ����⡣���������һ������������㷨�����ٶȣ��ڴ˻����ϣ�����һ���µı䲽���������̽�һ�������㷨���������̬��ͨ����������������������Ц��ͦµ�ȡֵԭ���㷨�������ܵ�Ӱ�죬����2��ˮ���ŵ������£�����2�ֵ����źŽ����㷨������LMS���RLS���㷨���������ܽ��бȽϡ��о�������������㷨ʵ�ּ������ٶȿ죬��̬���С�����XENLMS�㷨������ˮ���ŵ��͵����źŵı仯�����㷨����Ӧ�Ի���³���Ը�ǿ���������ŵ������͵����źŵĸ��ӻ������㷨���������ܾ���RLS���㷨���൱��
�ؼ��ʣ�
LMS-Newton�������ٶ�����̬������ŵ�������ˮ��ͨ����
��ͼ����ţ�TN929.3 ���ױ�־�룺A ���±�ţ�1672-7207(2013)11-4548-06
A new fast LMS-Newton algorithm for application to underwater acoustic channel equalization
NING Xiaoling, LI Qiyuan, CHEN Zhigang
(Electronics Engineering College, Naval University of Engineering, Wuhan 430033, China)
Abstract: An improved fast LMS-Newton algorithm applied to underwater acoustic equalization was proposed. A new normalized factor was introduced to improve the convergence speed, and then a new variable step-size iterative equation was applied to reduce steady-state error. The adoption principle about various �� and �� and their influence on convergence ability of the presented algorithm were analyzed by simulation. After that, the comparison of convergence abilities were carried out among the new algorithm, several LMS class algorithms and several RLS class algorithms by using two modulation signals in two different underwater acoustic channels respectively. The results show that the new algorithm is of simple structure, fast convergence and less steady-state error. The adaptability of the new algorithm is superior to that of XENLMS algorithm when underwater channel and modulation signal change. At the same time, the convergence performance of new algorithm is similar to that of RLS with the complication of channel circumstance and modulation signal.
Key words: LMS-Newton; convergence speed; steady-state error; channel equalization; underwater acoustic communication
ˮ���ŵ������Ŀ����Ϊ�������ŵ��Դ����źŵ�Ӱ��ͼ�СISI�������Ϣ����Ŀɿ��ԡ�Ŀǰ�������ˮ��ͨ���У��ձ��������Ӧ���⼼�����˷�ISI[1]��LMS�㷨������Ӧ�˲��ĵ����㷨�����㷨��ṹ�������ȶ������㸴�Ӷȵ��Լ�����Ӳ��ʵ�֣������ˮ��ͨ���б��ձ�Ӧ��[2]������LMS�������źž��к�ǿ�������ʱ�����������½��ܿ�[3-4]��Ϊ�˸Ľ�LMS�㷨���������ܣ��������źŽ���ȥ��ػ���в������ƣ�Ϊ�ˣ����ֹ�һ��LMS�㷨[5-6]���䲽��LMS�㷨[7-9]�Լ�LMS/Newton�ĸĽ��㷨[10-11]��̱����������[5]�����һ�ֿɱ䲽����һ��LMS�㷨�������������ȶ��������ٶȿ졣����[6]�����һ�ָĽ��Ĺ�һ����������㷨XENLMS�㷨�����зdz���������ٶȣ����˷���RLS�㷨������������Ӳ��ʵ�ֵ�ʵ�����⡣����[7]�����һ�ֿ��ٵ��Զ��������ƶ��ŵ�FSLMS�㷨������Ч�����㷨�ļ��㸴�Ӷȡ�����[8]�����һ�ֶ�һ������IJ��ȶ��źŽ��д����ı䲽���㷨�����㷨��Ҫ������һ���ǶԽǻ�����������źŵ���ؾ�����н���ش���������[10]�����һ���Ƚ��ĸĽ�LMS-Newton�㷨����Ҫ������������������д���������[11]����˫�ŵ��ݶȸ����㷨�����һ���������ز������Ŀ���LMS/Newton�㷨�����NLMS�㷨����㸴�Ӷ��Ըߡ�������Щ�㷨��Ҫ��Ϊ�˼�ǿ�㷨���������ܺ��ȶ��ԣ��������㷨���ض������е�Ӧ�á�Ϊ�˽�һ���Ż��㷨����������ٶȣ������������һ���µĿ���LMS/Newton�㷨������Ӧ����ˮ���ŵ��ľ��⣬���÷���ʵ����֤����������㷨������ˮ���ŵ���������Խ���Լ������ԡ�
1 �Ľ��Ŀ���LMS-Newton�㷨
1.1 ��ͳ�Ŀ���LMS-Newton�㷨
LMS-Newton �㷨�����LMS �㷨�ļ����к�ţ���㷨�������������Զ��ʺ��ڸ��Ӷ���ˮ��������ͼ1��ʾΪLMS-Newton��������Ӧ����Ļ���ģ�͡�ͼ1�У�s(k)Ϊ��Դ�����Ķ���ͬ�ֲ��ź����У�h(k)Ϊ����ˮ���ŵ��弤��Ӧ��n(k)Ϊ�������У����ջ����յ��Ļ����ź�����
 ��
�� Ϊ�����о���Qu�������
Ϊ�����о���Qu�������
��ͳ��LMS-Newton�㷨��Ȩֵ��������Ϊ��
 (1)
(1)
 (2)
(2)
 (3)
(3)
���У� Ϊ�˲���Ȩֵ������
Ϊ�˲���Ȩֵ������
 Ϊ�˲�������������
Ϊ�˲������������� Ϊ������ؾ���
Ϊ������ؾ���
 �Ĺ��ƣ�
�Ĺ��ƣ� Ϊ�㷨�IJ���(��������)��
Ϊ�㷨�IJ���(��������)�� Ϊָ����Ȩ���ӣ���
Ϊָ����Ȩ���ӣ��� ��e(k)Ϊ������d(k)Ϊ���������
��e(k)������d(k)���������
�˲������Ϊ
 (4)
(4)
��ʽ(1)���Կ���������������Ψһ�ܹ����� �㷨�������̵IJ������㷨�������ȶ��ԡ������ٶ��Լ�ʧ���ⶼ����������йأ�������Ľ�LMS-Newton�㷨���ܱ���Ӹı�����������֡�����[12]��Ϊ�ڲ�ͬ��Ӧ�û���������ò�ͬ���������ӲŻ������ŵ�����Ч����
1.2 �Ľ���LMS-Newton�㷨
�̶��������ӵ�����Ӧ�����㷨����ͬʱ���������ٶȡ�ʱ��ϵͳ�����ٶ��Լ��������ȷ����Ҫ��Ϊ�˽�һ���Ľ��㷨�������ܣ��˷��̶������㷨��һ���㣬����ñ䲽���㷨����LMS�㷨��ȣ���һ��NLMS�㷨���ŵ����ڼ�С���ݶ������Ŵ�̶ȡ�NLMS�㷨Ҫ��LMS�㷨���ָ���������ٶȣ���������������ȶ�[13]������Ӧ�����㷨���г�ʼ�κ�δ֪ϵͳʱ��β����Զ��������̬ʱ������С���ص㣬�ҿ˷���LMS �㷨������Ӧ��̬�β������������еIJ��㣻ͬʱ�������õ��������ܡ���С����̬����Լ����õ�³���ԡ�
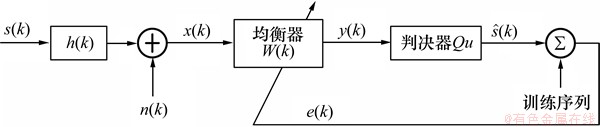
ͼ1 ����Ӧ�����㷨�Ļ���ģ��ͼ
Fig.1 Base band domain model of adaptive equalization algorithm
NLMS�㷨������Ӧ�����㷨��Ϊ�䲽���㷨����2���㷨�����в�ͬ�����ƣ���ˣ��µĸĽ��㷨��������2���㷨���ŵ㣬�Դ�ͳ���㷨���иĽ���
���㷨������LMS-Newton�㷨�Ļ����϶Բ����������иĽ����õ���һ��NLMS-Newton�㷨��
 (5)
(5)
����NLMS-Newton���ɲ�������Ϊ ��һ�ֱ䲽���㷨����Ȼ�����ٶȵõ���ߣ����ǣ���һ���㷨���������ܻ��д��Ľ���
��һ�ֱ䲽���㷨����Ȼ�����ٶȵõ���ߣ����ǣ���һ���㷨���������ܻ��д��Ľ���
��NLMS-Newton�㷨�Ļ����ϣ��ٽ�����Ӧ�����㷨���뵽�㷨�У��õ�VSSNLMS- Newton�㷨��
 (6)
(6)
����Ӧ����Ϊ
 (7)
(7)
����0�� ��1��0��
��1��0�� ��1��
��1��
2 �������Ƚ������
2.1 ���㷨����������
�����У������Ϊ20 dB���źŷֱ����QPSK���Ʒ�ʽ�������ŵ����õ��͵Ĵ���λ��ת��ϡ��ˮ�������ŵ� [14]������������ͷ��ȡM=32��ͼ2��ʾΪ���������㷨�������ߵ�Ӱ�졣
[14]������������ͷ��ȡM=32��ͼ2��ʾΪ���������㷨�������ߵ�Ӱ�졣
ͼ2(a)��ʾΪ=0.05����ͬ���㷨�������ߡ���ͼ2(a)���Կ����������IJ��������㷨�������ٶ������죬�����������̬�����С����ʵ��Ӧ���У�Ӧѡ��ϴ����
ͼ2(b)��ʾΪ=0.8����ͬ���㷨�������ߡ���ͼ2(b)���Կ����������IJ��������㷨�������ٶ������죬�����������̬���䡣��ʵ��Ӧ���У�Ϊ�˻�ýϿ�������ٶȣ�Ӧѡ��ϴ�������ӷ�����̷��֣����ϴ�ʱ������ȡ�ù����ڱ��η����У���0.3ʱ���㷨��ɢ��
�ɼ����̶���ѡ��ϴ�����㷨���������̬����ѡ���С��ҪС�öࣻ�̶���ѡ��ϴ�����㷨�������ٶȱ�ѡ���С�Ŀ졣���ǣ������㷨���������ܣ����ԣ���ʵ��Ӧ���У�Ӧ��������
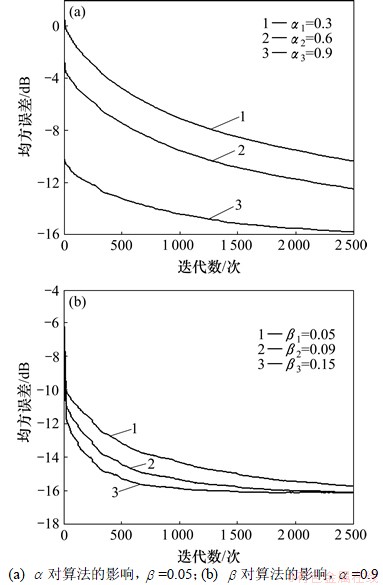
ͼ2 �������������㷨(VSSNLMS- Newton)�������ߵ�Ӱ��
Fig.2 Effect of adjusting step size convergence curves of VSSNLMS- Newton algorithm
2.2 ��LMS���RLS���㷨���������ߵıȽ�
����[4]�����һ�ָĽ��Ĺ�һ����������㷨XENLMS�㷨�����зdz���������ٶȣ����˷���RLS�㷨������������Ӳ��ʵ�ֵ�ʵ�����⣬Ϊˮ��ͨ���ṩ��һ�����������Ŀ�ʵ�ַ��������Ķ�XENLMS��RLS��LMS-Newton��NLMS-Newton��VSSNLMS-Newton 5���㷨���бȽϡ�
�����������Ϊ20 dB���źŷֱ����QPSK��16QAM���Ʒ�ʽ�������ŵ�1Ϊ���͵Ĵ���λ��ת��ϡ��ˮ�������ŵ�������������ͷ��ȡM=32���ŵ�2Ϊϡ��ྶ�ŵ�
 [6]�����ŵ�1���ӣ���������ͷ��ȡM=82�������������ͼ3��ʾ��
[6]�����ŵ�1���ӣ���������ͷ��ȡM=82�������������ͼ3��ʾ��
��ͼ3(a)��֪�����ŵ�1��QPSK���Ƶķ��������£�LMS-Newton��XENLMS��NLMS-Newton��VSSNLMS-Newton�㷨�������ٶ�������ǿ��VSSNLMS-Newton��RLS�㷨�������������غϣ������������ٶȺ���̬������ͬ����NLMS-Newton��ȣ�LMS-Newton�����ٶȽϿ죬�������������̬����ԼΪ3 dB��VSSNLMS-Newton��NLMS-Newton�������ٶ��൱�����ǣ�NLMS-Newton��������̬���ɼ������������VSSNLMS-Newton���зdz���Խ���������ܡ�
ͼ3(c)��ͼ3(a)�����������У����㷨�ı仯������ȫ��ͬ��Ҳ����˵�������źű仯���ŵ��������䣬VSSNLMS-Newton��RLS���������ܼ�����ͬ��ֻ�����ŵ����źŵĸ��ӻ������㷨���������̬���������Լ4 dB������LMS-Newton��XENLMS���������߸��ӽ���˵��LMS-Newton���ڵ����źŵı仯����Ӧ�Ա�XENLMS��ǿ��
��ͼ3(a)��ȣ�ͼ3(b)�и��㷨���������������仯�����ŵ�2�����£�LMS-Newton��XENLMS�������ٶȿ죬VSSNLMS-Newton�������ٶȱ�RLS�������ٶ�Լ��200�ε�����
�Ƚ�ͼ3(d)��ͼ3(b)��֪�����㷨���������Ʋ��䣬�����ڵ����źŵĸ��ӻ���ʹ�ø��㷨���������̬�����QPSK����ʱ��ȣ�������Լ4 dB��
�ɼ��������ŵ������͵����źŵĸ��ӻ���VSSNLMS-Newton����������RLS���൱��
2.3 �������䲽���㷨�������ߵıȽ�
����[15]����䲽��LMS�㷨���нϺõ��������ܣ��ұ������ı䲽������Ӧ�˲��㷨�ļ������٣����Ľ��ñ䲽���㷨Ӧ�õ�ʽ(6)��NLMS-Newton�㷨�У��õ���������[15]��NLMS-Newton�㷨�����������㷨�������VSSNLMS-Newton�㷨���ܽ��бȽϡ��������QPSK�����źţ��ֱ����ŵ�1���ŵ�2�½��бȽϷ������õ�������������ͼ4��ʾ��
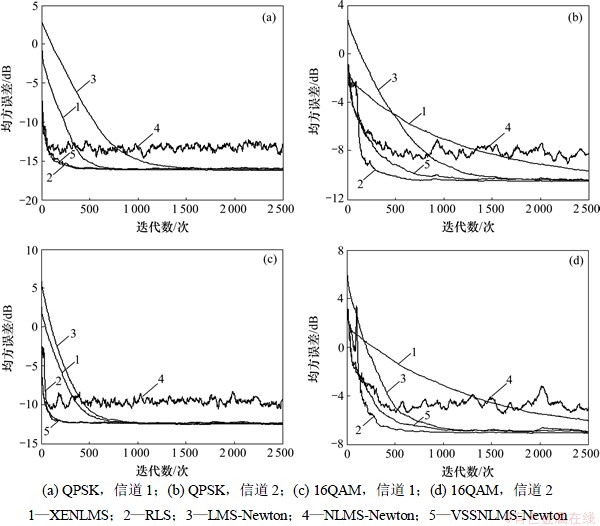
ͼ3 2�ֵ��Ʒ�ʽ���ŵ������µIJ�ͬ�㷨���������߱Ƚ�
Fig.3 Comparison of convergence curves of different algorithms under two modulation and channels
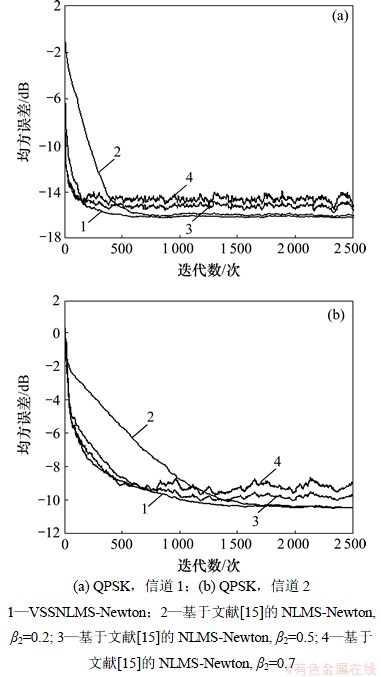
ͼ4 �����㷨(VSSNLMS-Newton)�ͻ�������[15]��NLMS-Newton�㷨�������߱Ƚ�
Fig.4 Comparison of convergence curves of VSSNLMS-Newton and NLMS-Newton based in Ref.[15]
��ͼ4���Կ�������������[15]��NLMS-Newton�㷨��3�ֲ�������( =0.5��
=0.5�� =0.2��
=0.2�� =0.7(���㷨�е�
=0.7(���㷨�е� =0.001��=300))�����������б��ֳ�һ�ֱ仯���ƣ�����0.5ʱ�����㷨�������ߵ������ٶȱ�VSSNLMS-Newton�㷨��������������С�������ٶ�����������̬�����ͬ������0.5ʱ�����㷨�������ߵ������ٶ���VSSNLMS-Newton�㷨���൱�����ǣ���̬���Ҫ�Դ�����������������̬���������=0.5ʱ����������[15]��NLMS-Newton�㷨ȡ����õ�����Ч�������ǣ����۸��㷨�IJ�����α仯�����㷨�����ܾ���VSSNLMS-Newton�㷨�����������Բ
=0.001��=300))�����������б��ֳ�һ�ֱ仯���ƣ�����0.5ʱ�����㷨�������ߵ������ٶȱ�VSSNLMS-Newton�㷨��������������С�������ٶ�����������̬�����ͬ������0.5ʱ�����㷨�������ߵ������ٶ���VSSNLMS-Newton�㷨���൱�����ǣ���̬���Ҫ�Դ�����������������̬���������=0.5ʱ����������[15]��NLMS-Newton�㷨ȡ����õ�����Ч�������ǣ����۸��㷨�IJ�����α仯�����㷨�����ܾ���VSSNLMS-Newton�㷨�����������Բ
3 ����
(1) �����һ�����ӣ��õ���һ��LMS-Newton�㷨����ͨ������һ���µIJ����������̣������һ���µı䲽������Ӧ�˲��㷨��ͬʱ�����˲�������ȡֵԭ���Լ����㷨���ܵ�Ӱ�졣
(2) ������������㷨�нϺõ��������ܣ����ŵ����źź��ŵ������ı仯���㷨�����к�ǿ���ȶ��ԣ���RLS���������̬�����ͬ�������ٶ�Ҳ���������XENLMS�㷨��ȣ��ŵ������͵����ź�Խ���ӣ�����������Խǿ��ͬʱ�����㷨�Ȼ�������[15]��NLMS-Newton�㷨���������ܸ���Խ��
�ο����ף�
[1] Kilfoyle D B, Baggeroer A B. The state of the art in underwater acoustic telemetry[J]. IEEE Journal of Oceanic Engineering, 2000, 25(1): 4-27.
[2] Istepanion R S H, Stojanovic M. Under-water acoustic digital signal processing and communication systems[M]. London: Kluwer Academic Publishers, 2002: 4-16.
[3] ��Դ��. LMS�㷨���������о���Ӧ��[D]. ����: �廪��ѧ��Ϣ��ѧ����ѧԺ, 2003: 58-60.
GU Yuantao. Studies on the convergence performance of least mean square (LMS) algorithm and its applications[D]. Beijing: Tsinghua University. School of Information and Technology, 2003: 58-60.
[4] Haykin S. Adaptive filter theory[M]. 4th ed. Englewood Cliffs: Prentice-Hall, 2002: 10-60.
[5] Zerguine A, Chan M K, Al-Naffouri T Y, et al. Convergence and tracking analysis of a variable normalized LMF (XE-NLMF) algorithm[J]. Signal Processing, 2010, 89: 778-790.
[6] ��С��, ����, ������, ��. ˮ���ŵ�������������Ӧ�㷨[J]. ϵͳ��������Ӽ���, 2010, 32(12): 2524-2527.
NING Xiaoling, LIU Zhong, LUO Yasong, et al. Fast convergence adaptive equalization algorithm for underwater acoustic channels[J]. Systems Engineering and Electronics, 2010, 32(12): 2524-2527.
[7] Reddy E P, Das D P, Prabhu K M M. Fast exact multi-channel FSLMS algorithm for active noise control[J]. Signal Processing, 2009, 89: 952-956.
[8] Gupta A, Joshi S. Variable step-size LMS algorithm for fractal signals[J]. IEEE Trans on Signal Processing, 2008, 56(4): 1411-1420.
[9] Zhao S, Man Z, Khoo S, et al. Variable step-size LMS algorithm with a quotient form[J]. Signal Processing, 2009, 89(1): 67-76.
[10] ZHOU Yi, Chan S C, Ho K L. A new LMS/NEWTON algorithm for robust adaptive filtering in impulsive noise[C]// The 2001 IEEE International Symposium on Circuits and Systems. 2002: 705-708.
[11] Rao H I K, Farhang-Boroujeny B. Fast LMS/Newton algorithms for stereophonic acoustic echo cancelation[J]. IEEE Transactions on Signal Processing, 2009, 57(8): 2919-2930.
[12] Diniz P S R, de Campos M L R, Antoniou A. Analysis of LMS-Newton adaptive filtering algorithms with variable convergence factor[J]. IEEE Transactions on Signal Processing, 1995, 43(3): 617-628.
[13] ������. ����Ӧ�˲��㷨��ʵ��[M]. 2��. ����: ���ӹ�ҵ������, 2004: 96-99.
YANG Yixian. Adaptive filtering algorithms and practical implementation[M]. 2nd ed. Publishing House of Electronics Industry, 2004: 96-99.
[14] Falahati A, Woodward B, Bateman S C. Underwater acoustic channel models for 4800b/s QPSK signals[J]. IEEE Journal of Oceanic Engineering, 1991, 16(l): 12-19.
[15] ��ӥ, лʤ��. һ�ֱ䲽�� LMS ����Ӧ�˲��㷨������[J]. ����ѧ��, 2001: 1094-1097.
GAO Ying, XIE Shengli. A variable step size LMS adaptive filtering algorithm and its analysis[J]. Acta Electronica Sinica, 2001, 29(8): 1094-1097.
(�༭ �Կ�)
�ո����ڣ�2012-10-08�������ڣ�2012-12-30
������Ŀ��������Ȼ��ѧ����������Ŀ(61101205)���������̴�ѧ��Ȼ��ѧ����������Ŀ(201300000446)
ͨ�����ߣ���С��(1982-)��Ů�����������ˣ���ʿ����ʦ������ˮ�¸���ͨ���������Ʒ����о����绰��13437266399��E-mail: zhang_ning1982b@yahoo.com.cn
ժҪ�����һ���µĿ���LMS-Newton�㷨���������㷨����ˮ���ŵ����⡣���������һ������������㷨�����ٶȣ��ڴ˻����ϣ�����һ���µı䲽���������̽�һ�������㷨���������̬��ͨ����������������������Ц��ͦµ�ȡֵԭ���㷨�������ܵ�Ӱ�죬����2��ˮ���ŵ������£�����2�ֵ����źŽ����㷨������LMS���RLS���㷨���������ܽ��бȽϡ��о�������������㷨ʵ�ּ������ٶȿ죬��̬���С�����XENLMS�㷨������ˮ���ŵ��͵����źŵı仯�����㷨����Ӧ�Ի���³���Ը�ǿ���������ŵ������͵����źŵĸ��ӻ������㷨���������ܾ���RLS���㷨���൱��
[3] ��Դ��. LMS�㷨���������о���Ӧ��[D]. ����: �廪��ѧ��Ϣ��ѧ����ѧԺ, 2003: 58-60.
[4] Haykin S. Adaptive filter theory[M]. 4th ed. Englewood Cliffs: Prentice-Hall, 2002: 10-60.
[6] ��С��, ����, ������, ��. ˮ���ŵ�������������Ӧ�㷨[J]. ϵͳ��������Ӽ���, 2010, 32(12): 2524-2527.
[13] ������. ����Ӧ�˲��㷨��ʵ��[M]. 2��. ����: ���ӹ�ҵ������, 2004: 96-99.
[15] ��ӥ, лʤ��. һ�ֱ䲽�� LMS ����Ӧ�˲��㷨������[J]. ����ѧ��, 2001: 1094-1097.
