

J. Cent. South Univ. (2020) 27: 88-100
DOI: https://doi.org/10.1007/s11771-020-4280-7

Performance enhancement of IMC-PID controller design for stable and unstable second-order time delay processes
Munna KUMAR, Durga PRASAD, Ram Sharan SINGH
Department of Chemical Engineering, Indian Institute of Technology (BHU), Varanasi-221005, India
 Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2020
Central South University Press and Springer-Verlag GmbH Germany, part of Springer Nature 2020
Abstract:
An IMC-PID controller was proposed for unstable second-order time delay system which shows the characteristics of inverse response (RHP zero). A plot of Ms versus �� was suggested to calculate the suitable tuning parameter ��, which provides a trade-off between performance and robustness. Six different forms of process models were selected from literature to show the applicability of the present method. Performance of controller was calculated by ITAE and total variation TV and compared with recently published tuning rules. Undesirable overshoot was removed by using a set-point weighting parameter. Robustness was tested by introducing a perturbation into the various model parameters and closed-loop results show that the designed controller is robust in the case of model uncertainty. The proposed method shows an overall better closed-loop response as compared to other recently reported methods.
Key words:
Cite this article as:
Munna KUMAR, Durga PRASAD, Ram Sharan SINGH. Performance enhancement of IMC-PID controller design for stable and unstable second-order time delay processes [J]. Journal of Central South University, 2020, 27(1): 88-100.
DOI:https://dx.doi.org/https://doi.org/10.1007/s11771-020-4280-71 Introduction
Various advanced control techniques, like model predictive control (MPC), neural network, neuro-fuzzy logic, fuzzy logic, sliding mode control and adaptive control, have been developed in the field of process control [1]. However, in the process industries, PID type controllers are used in more than 95% cases at the bottom level of control loops due to its simple structure, robust nature and optimal performance and accessible in real-time application [2]. The process industries consist of several forms of first- and second-order stable (flow, level, and temperature), unstable (Jacketed continuous stirred tank reactor, polymerization, and bioreactor) and integrating (level and flow) processes with or without RHP zero. Unstable conditions frequently occur in the various processes in the chemical and allied industries such as distillation columns, polymerization reactors, chemical reactors, heat exchangers, and fermenters [3, 4]. Due to unstable conditions, these processes are difficult to control and difficulty level increases if the time delay appeared in such processes [5].
A significant amount of PID tuning techniques for unstable first-order plus time delay (FOPDT) and second-order time delay processes (USOPDT) are available in the literature. The processes encountered in the industries with multiple numbers of variable parameters. Therefore, controller design should provide a desirable performance along with covering the maximum range of process parameters variations. The conventional PID design techniques were given by Ziegler and Nichols [6], and Cohen and Coon [7] are easy to apply and perform well in lag dominant (integrating) for setp-oint tracking. These methods show poor performance for load disturbance. Several other tuning rules for disturbance rejection, which improved the overall closed-loop performances, are available in the literature. The tuning techniques like direct synthesis (DS) [8-10], and internal model control (IMC) [11-15] successfully tested for different categories of processes were difficult to control using conventional PID controller design. IMC controller is augmented by a low pass filter to make the controller proper and realizable.
The filter has an important feature, which decides the structure of the controller and ultimately performance of the control system. In designing of IMC-PID, there is only one tuning parameter which helps to calculate controller parameters quickly, and a trade-off between performance (��tight�� control) and robustness (��smooth�� control) is accomplished by adjusting the tuning parameter [16]. An optimal IMC filter and consequently IMC-PID for various stable and unstable models were proposed by Shamsuzzoha and Lee [17], which provided an enhanced disturbance rejection response for the ratio greater than 1 for lag-time constant to time delay. An IMC-PID controller cascaded with a lead-lag compensator for second order time delay system was proposed by Shamsuzzoha and Lee [18], which give excellent results for set-point change and disturbance rejection. Tchamna et al [19] design an analytical two-parameter optimal second-order IMC filter and the PID parameters were calculated by minimizing of weighted sum of the error between set-point and output, and square of the manipulated variable in constraint to output variable, manipulated variable, and rate of change of manipulated variable for FOPDT system. The designed controller should be robust in the case of model uncertainty or plant and model mismatch. There is good possibility of occurrence of significant uncertainties in mathematical models of industrial processes (due to its complex nature) used for controller design. A large amount of uncertainty available in the model severely affects the controller performance and ultimately fails to achieve the desired control action. Model uncertainties may present in-process models due to several reasons such as uncertainty obtained due to linearization of process models. Most of the real processes are nonlinear, and if the models are obtained via linearization, the linearized models are accurate in the adjacent operating regions only [20]. Significant variation from set-point leads to unsatisfactory performance in the case of using linearized models of non-linear processes.
Skogestad [13] proposed the SIMC rule for first order time delay (FOPDT) process obtained from the closed-loop experiment. The design method has a single tuning parameter which was used to obtain controller parameters. The optimality of the SIMC PI rule was derived by Pareto-optimal curve of performance (IAE) versus the maximum sensitivity (Ms). A maximum sensitivity-based IMC-PID controller was derived for FOPDT and SOPDT system [21]. Deniz et al [22] developed a PI controller using Smith predictor, and stability regions were compared for perfectly matched and perturbed models. KWon [23] developed a batch PID controller and obtained an improved closed- loop performance for batch process. A model matching approach for the frequency response of the desired model and closed-loop was applied for the designing of PID controller and minimized the error-index of integral of square error (ISE) [24]. Begum et al [25] purposed an analytical technique of H2 optimal IMC-PID design for unstable first order time delay (UFOPDT) process, and the tuning parameter �� is selected from a plot of Ms versus ��. The performance-robustness trade-off was studied using a plot of performance (IAE) against robustness (Ms). Arrieta and Vilanova [26] and Chu et al [27] developed Ms based PID tuning techniques for servo/regulatory problems for stable systems. Begum et al [28] and Dasari et al [29] have developed IMC-PID by H2 optimal technique for second-order time delay unstable process. These methods used two control-loops, primary loop consist IMC-PID with lead-lag compensator designed by H2 minimization, and secondary control-loop was designed by simple IMC principle. Various other researchers developed H2 minimization based IMC-PID for unstable second- order integrating processes having RHP zero [30-32]. All these methods provide a systematic procedure to select the Ms based controller tuning parameter.
Therefore, literature provides an adequate number of IMC-PID design techniques for different forms of first- and second-order time delay processes with RHP zero. However, many of these control design techniques do not provide satisfactory results in the case of high time delay unstable systems. Several reported methods used two or more control loop for the controller design such as modified Smith predictor. These types of methods required more computation or required more control efforts to achieve the final desired steady-state value. Simple PID or PID controller cascaded with a lead-lag filter can achieve similar closed-loop performances, and it is easy to use on a real system [33]. Hence, it would be better to design a simple PID or PID controller with a lead-lag filter instead of designing modified control schemes. The above literature shows the design of PID controller is a challenging task for stable and unstable integrating process models having nonminimum phase since these processes show a significant overshoot and take more time to reach a final steady-state value.
Based on literature review and above discussions, in the present work, an IMC-PID controller was proposed for unstable second order time delay process with RHP zero. Originally, the proposed method was developed by Kumar et al [34] and applied to control the bioreactor temperature in the fermentation process. A second order time delay unstable process was estimated by the identification method in MATLAB. The PID parameters were calculated by the proposed tuning rule and applied successfully for control of bioreactor temperature. A systematic guideline to select a suitable tuning parameter based on Ms value was recommended which can achieve robust performance. Six different forms of second order stable, unstable and integrating time delay process were studied and evaluated the performance of the present method. The simulated closed-loop results of the proposed scheme were compared to recently published methods, and the present method was found to be improved in both cases of the servo and regulatory problem.
2 Controller design
The control system internal model control loop, and feedback control structure shown in Figure 1, were considered for analysis of the proposed technique. The process transfer function denoted by Gp and Gm represents the process model. Q(s) denotes the IMC controller, and its equivalent feedback controller is represented by C(s). The proposed method was initially developed by Kumar et al [34] for unstable second-order time delay system and applied to control the bioreactor temperature. To more generalize the present method, six different categories of unstable and integrating processes were considered, and the closed-loop performance compared to several other recently published methods. Generally, the following forms of transfer function models are found in the process industries.
 (1a)
(1a)
 (1b)
(1b)
 (1c)
(1c)
 (1d)
(1d)
In Eqs. (1a)-(1d), the transfer function model of Eq. (1d) is more difficult to control due to the presence of both RHP pole and zero. Therefore, in the present method, an unstable second-order time delay process with inverse response characteristics in Eq. (2) was considered for controller design.
 (2)
(2)
where a1>0, a2<0 and RHP pole of Gp may be real or complex.
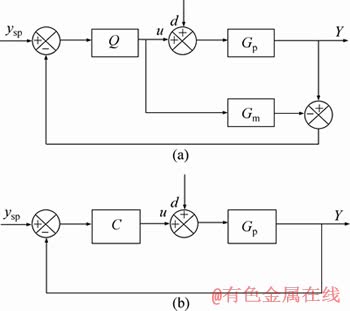
Figure 1 Internal model control (IMC) structure (a) and feedback control system (b)
IMC controller is written as where f(s) denotes the IMC filter, which is selected in such a manner that makes IMC controller proper, internally stable and realizable.
where f(s) denotes the IMC filter, which is selected in such a manner that makes IMC controller proper, internally stable and realizable.
In the proposed study, IMC filter was selected as
 (3)
(3)
To design the IMC controller, and plant model was parameterized as Gm=Gm+Gm-, where Gm+ represents RHP zero and time delay term and Gm- denotes the minimum phase part.
Therefore,
 (4)
(4)
The IMC controller Q can be calculated by solving Eqs. (3) and Eq. (4), and the final form of Q is written in Eq. (5).
 (5)
(5)
The feedback controller C(s) is evaluated by simplification of IMC structure to the feedback control-loop and given by Eq. (6).

 (6)
(6)
Taylor series approximation was used to approximate the delay term as e-��s=1-��s in Eq. (6), so finally the feedback controller C(s) is obtained and given in Eq. (7).
 (7)
(7)
Further, Eq. (7) is rearranged to the following form given in Eq. (8)

 (8)
(8)
where,
 (9a)
(9a)
 (9b)
(9b)
 (9c)
(9c)
 (9d)
(9d)
The denominator term of Eq. (8), is factorized as
 (10)
(10)
The coefficients x1, x2 and x3 were calculated by equating the corresponding coefficients of equal order of ��s�� in Eq. (10).
 (11a)
(11a)
 (11b)
(11b)
 (11c)
(11c)
The coefficients ��1, ��2 and �� in Eq. (12) are calculated by solving Eq. (9) and Eq. (11).
 (12a)
(12a)
 (12b)
(12b)
 (12c)
(12c)
where
 (13a)
(13a)
 (13b)
(13b)
 (13c)
(13c)
 (13d)
(13d)
 (13e)
(13e)
 (13f)
(13f)
The feedback controller C(s) is simplified to a standard form of PID and given in Eq. (14) and the proposed PID controller was also discussed in Ref. [34].
 (14)
(14)
where  ��i=��1, and
��i=��1, and and
and  and �� is tuning parameter of the controller.
and �� is tuning parameter of the controller.
2.1 Selection guideline for ��
Proper selection of �� is a challenging task because of a tradeoff between desired performance and robustness. A small value of �� provides faster response and give better disturbance rejection in case of stable processes. However, larger �� favors for more stable and robust controller. However, in the unstable case, it is not always correct. In the present study, the tuning parameter �� is selected from a plot of Ms versus ��. Generally, a peak of the maximum value of sensitivity is obtained at some particular value of �� and then after it decreases rapidly and finally becomes constant up to a specific range of ��. One can easily choose the suitable �� from this plot and calculate the controller parameters so that the desired level of performance and robustness can achieve. Similar selection method was used by various other recently published papers [25, 31, 35, 36].
2.2 Robustness and stability analysis
The model uncertainties are widespread in the process industries. Various types of uncertainties may exist in the processes, as discussed earlier. However, in this work, only the parametric uncertainties are considered, and a particular value of perturbation is introduced into the process parameters such as in gain Kp, dead time �� and in time constants �� 1 and �� 2. For a robust and stable feedback system, the following condition must be satisfied [20].
 (15)
(15)
where T(s=j��) denotes the complementary sensitivity function, which is defined as T(s)= C(s)Gp(s)/(1+C(s)Gp(s)) and lm(s=j��) is the multiplicative uncertainty bound on the process model. The multiplicative uncertainty in the process model can be stated as
 (16)
(16)
In the case of uncertainty present in the time delay of the process, �� should be selected such that the following condition is satisfied
 (17)
(17)
If it appeared into the process gain, the parameter �� must have opted so that the below condition should satisfied
 (18)
(18)
The sensitivity must fulfill the constraints, and complementary sensitivity functions are provided in the following Eq. (19) to obtain the desired robustness of the process [20].
 (19)
(19)
where wm(j��) is the maximum sensitivity (Ms) uncertainty bound which is (1-T(j��)). Therefore, �� must be selected in such a way that the resulting controller satisfies the robust performance and stability limitations.
3 Simulation studies
Six different forms of second order time delay unstable and integrating process having RHP zero are studied to analyze the performance of the present method. Simulated closed-loop results are compared to similar reported Ms based IMC-PID. The performances of the different tuning methods are calculated in terms of integral of the time- weighted absolute error ITAE and total variation (TV). The proposed method provides enhanced closed-loop results as compared to another tuning rule.
3.1 Integral error criteria
The performance of the proposed method is calculated in terms of the integral of the time-weighted absolute error (ITAE) for set-point change and load disturbance in the case of nominal as well as in perturbed conditions.
 (20)
(20)
where e(t) is the error signal obtained by taking the difference between the set-point and output signal. The ITAE is applied in the case long-time error appeared in the system.
3.2 Total variation
Total variation (TV) is an important performance parameter for measuring the control efforts (manipulated input usage) or smoothness of the control signal [13]. If control signal u(t) is discretized as [u1, u2, u3, ��, ui��], then  should be the minimum.
should be the minimum.
3.3 Set-point weighting
The standard form of PID controller is given by

 strom and Hagglund proposed a most widely accepted control structure to deal with undesirable overshoot and suggested to apply a weighted set-point and derivative form of the controller and which is given by
strom and Hagglund proposed a most widely accepted control structure to deal with undesirable overshoot and suggested to apply a weighted set-point and derivative form of the controller and which is given by

 (21)
(21)
where b is the weighting parameter of set point and c denotes the weight for the derivative time constant. Generally, these parameters lie in the range of 0 to 1. The overshoot decreases upon decreasing b. In this study, only a set-point weighting is applied in the control-loop to remove the undesirable overshoot because it is simple to apply and gives an improved closed-loop response. This technique is applied to the various process model��s examples, and the simulation studies observed that the set-point weighting coefficient b in the range of 0.2-0.5 provides the best performance and minimum overshoot. A similar range of parameter b is proposed for integrating or unstable processes [38].
3.4 Example 1: Unstable second-order time delay process (USOPDT)
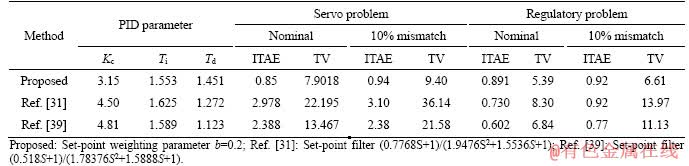
A USOPDT process was considered from Refs. [31, 39] for evaluation performance of proposed PID tuning rule. The tuning parameter ��=0.4, and their corresponding Ms was obtained to be 3.955 by analyzing a plot of Ms against �� as shown in Figure 2. A unit step change in set-point and load disturbance is shown in Figure 3. The PID parameters for various methods and corresponding closed-loop performance in terms of ITAE and TV are matrixed in Table 1. The ITAE value is much lower for servo and comparable in regulatory problem in the proposed method. Hence, Table 1 confirms that the present method is improved compared to other tuning methods for nominal as well as in perturbed conditions:
 .
.
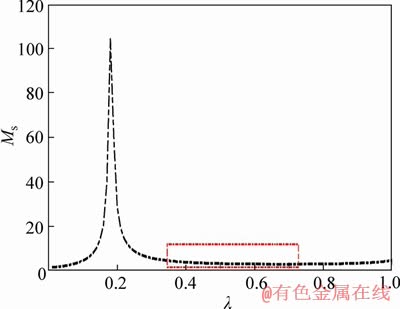
Figure 2 Plot of Ms against �� for Example 1
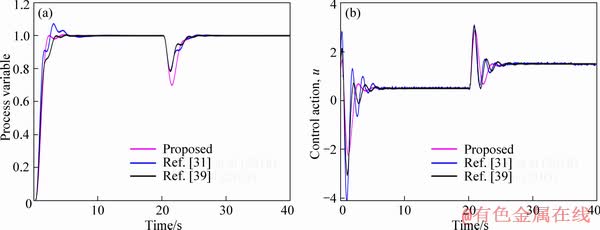
Figure 3 Closed-loop (a) and corresponding control action response (b) of various tuning methods (Example 1)
Table 1 PID parameters and performance for servo as well as regulatory problem of different tuning methods for Example 1
3.5 Example 2: Second-order unstable integrating time delay process
An unstable integrating process of second- order time delay Gp=e-0.2s/[s(s-1)] is considered from Refs. [36, 40] for analysis of proposed tuning rule. The operating range of tuning parameter �� is shown by a rectangle in Figure 4, and beyond this range, the closed-loop response either becomes unstable or gives a sluggish response. ��=0.45 and corresponding Ms=3 are selected from Figure 4 to obtain a fast and robust response. Anusha and RAO [36] and Kumar and Sree [40] used Ms values of 2.3 and 1.94, respectively. The PID parameters of different tuning methods and their performance parameters ITAE and TV are given in Table 2.
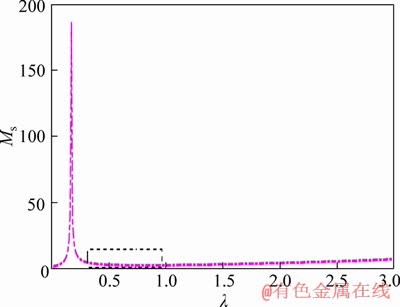
Figure 4 Plot of Ms against �� for Example 2
Figure 5 shows that the proposed method has faster response for servo as well as regulatory problem and the comparable control action. Table 2 confirms that a lower value of ITAE and comparable TV are obtained in the case of the proposed method for nominal and perturbed conditions. Robustness of the controller is analyzed by introducing 10% perturbation in time delay, and the proposed method shows more satisfactory results in the case of model uncertainty.
Table 2 PID parameters and performance for servo as well as regulatory problem of different tuning methods for Example 2

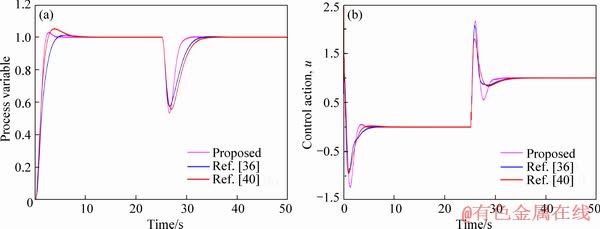
Figure 5 Closed-loop (a) and corresponding control action response (b) of various tuning methods (Example 2)
3.6 Example 3: Second order integrating time delay process with RHP zero
A steam boiler drum of the transfer function Gp=0.547(-0.418s+1)e-0.1s/[s(1.06s+1)] is considered from Refs. [30, 38] for controlling the level of a drum by manipulating feed water to the boiler drum. The process model is approximated to Gp= and PID parameters are obtained using different methods. Uma et al [38] proposed a PID controller with second-order lag filter for set-point tracking and designed a PD controller for disturbance rejection by using Smith predictor technique. Performance of different tuning methods in terms of ITAE and TV is shown in Table 3 for nominal as well as 20% perturbation in time delay. To choose the proper value of tuning parameter, a plot of Ms against �� is plotted as shown in Figure 6 and ��=0.53 is selected to achieve equal degree of robustness, i.e., Ms=2.94 to the other tuning methods. In the proposed method, TV value is slightly higher for servo problem and disturbance rejection. However, ITAE is almost half of the other methods for set-point tracking and disturbance rejection in the case of present method. Figure 7 shows the comparison of closed-loop performance of different tuning methods for unit step change in set-point and -1 in load at time t=20 s. Table 3 confirms that the present method is preferred to another tuning rule for nominal as well as in the case of 20% perturbation in time delay.
and PID parameters are obtained using different methods. Uma et al [38] proposed a PID controller with second-order lag filter for set-point tracking and designed a PD controller for disturbance rejection by using Smith predictor technique. Performance of different tuning methods in terms of ITAE and TV is shown in Table 3 for nominal as well as 20% perturbation in time delay. To choose the proper value of tuning parameter, a plot of Ms against �� is plotted as shown in Figure 6 and ��=0.53 is selected to achieve equal degree of robustness, i.e., Ms=2.94 to the other tuning methods. In the proposed method, TV value is slightly higher for servo problem and disturbance rejection. However, ITAE is almost half of the other methods for set-point tracking and disturbance rejection in the case of present method. Figure 7 shows the comparison of closed-loop performance of different tuning methods for unit step change in set-point and -1 in load at time t=20 s. Table 3 confirms that the present method is preferred to another tuning rule for nominal as well as in the case of 20% perturbation in time delay.
3.7 Example 4: Unstable second-order time delay integrating process with RHP zero
Here, an unstable second-order integrating process with an RHP pole and zero, Gp= (-0.2s+1)e-0.2s/[s(s-1)] is considered from Ref. [30] for analysis of the proposed method. Begum et al [30] approximated the above process to Gp= and designed a maximum sensitivity based H2 optimal IMC-PID controller. The maximum sensitivity Ms=7.23 is obtained at tuning parameter ��=1.3. A second-order setpoint filter is also designed to minimize undesirable overshoot. ��=0.9 is selected in the present study by analyzing the plot shown in Figure 8 and the corresponding value of Ms=4.9 is obtained. PID parameters of different methods and their corresponding closed-loop performance in terms of ITAE and TV are noted in Table 4. Undesirable overshoot was minimized by applying a set-point weighting parameter of b=0.3. The closed-loop responses for step change of 1 in set point as well as -1 in load change for different methods are shown in Figure 9. The ITAE value is much lower in the case of the proposed method as compared to another tuning rule for set-point change as well as disturbance rejection. Table 4 and the closed-loop response in Figure 9 clearly show that the present method is preferable to Begum et al [30].
and designed a maximum sensitivity based H2 optimal IMC-PID controller. The maximum sensitivity Ms=7.23 is obtained at tuning parameter ��=1.3. A second-order setpoint filter is also designed to minimize undesirable overshoot. ��=0.9 is selected in the present study by analyzing the plot shown in Figure 8 and the corresponding value of Ms=4.9 is obtained. PID parameters of different methods and their corresponding closed-loop performance in terms of ITAE and TV are noted in Table 4. Undesirable overshoot was minimized by applying a set-point weighting parameter of b=0.3. The closed-loop responses for step change of 1 in set point as well as -1 in load change for different methods are shown in Figure 9. The ITAE value is much lower in the case of the proposed method as compared to another tuning rule for set-point change as well as disturbance rejection. Table 4 and the closed-loop response in Figure 9 clearly show that the present method is preferable to Begum et al [30].
3.8 Example 5: Second-order integrating time delay process
An integrating process model of a second-order irreversible exothermic reaction carrying out in a jacketed continuous stirred tank reactor (JCSTR)  is considered from Ref. [30, 40] to study the proposed controller for temperature control of the reactor.
is considered from Ref. [30, 40] to study the proposed controller for temperature control of the reactor.
Table 3 PID parameters and performance parameters for servo as well as regulatory problem of different tuning methods for Example 3
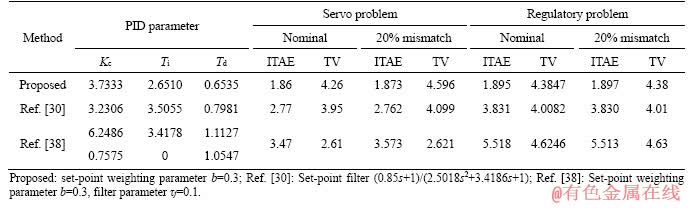
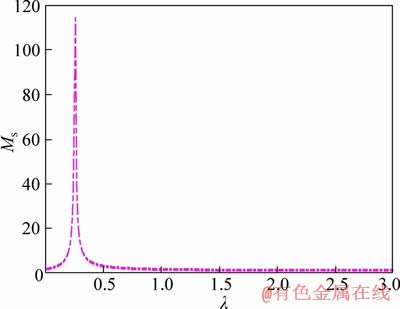
Figure 6 Plot of Ms against �� for Example 3
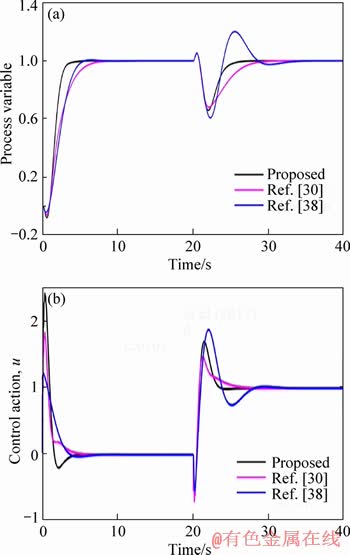
Figure 7 Closed-loop (a) and corresponding control action response (b) of various tuning methods (Example 3)
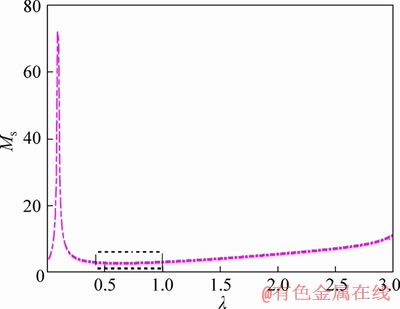
Figure 8 Plot Ms against �� for Example 4
The model is approximated to an unstable second order process Gp=-100e-s/[(100s-1)��
(-12.4224s-1)]. The present technique is applied to this process by assuming process parameters kp=-100, a1= -1242.24, a2=-87.578, p=0, and ��=1. ��=1.58 is selected from Figure 10 in such a way that provides equal value of Ms=2.4 to Begum et al [30] for a fair comparison. Table 5 shows the closed-loop performance of different tuning methods in terms of ITAE and TV for nominal as well as 20% perturbation in time delay for servo as well as disturbance rejection.
The proposed method shows comparable closed-loop results in the case of unit step change in set-point but, improved performance is obtained in case of -0.6-unit step change in the disturbance. Figure 11 confirms that the closed-loop response is superior to other methods for setpoint change as well as load change.
3.9 Example 6: Integrating second-order time delay process
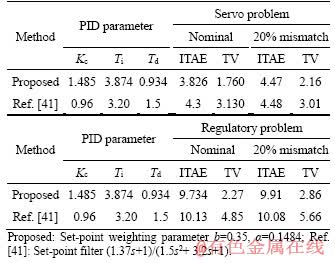
An integrating second-order transfer function of Gp=e-1s/[s(1.5s+1)] is considered from Ref. [41] and further approximated to a second order process of  A plot Ms vs �� shown in Figure 12 is used to calculate of ��=0.85 in such a way that provides equal degree robustness Ms=1.7 to Ref. [41]. PID parameters of the present method along with other method are listed in Table 6. Figure 13 shows that the proposed method gives a faster response and lower settling time than other methods in case of servo and regulatory problems. Robustness of the controller is tested by introducing a perturbation of 20% of time delay and compared the performance in terms of ITAE and TV. Table 6 shows that the proposed method has lower value of ITAE and TV in both conditions nominal and perturbed for set-point as well as in load change.
A plot Ms vs �� shown in Figure 12 is used to calculate of ��=0.85 in such a way that provides equal degree robustness Ms=1.7 to Ref. [41]. PID parameters of the present method along with other method are listed in Table 6. Figure 13 shows that the proposed method gives a faster response and lower settling time than other methods in case of servo and regulatory problems. Robustness of the controller is tested by introducing a perturbation of 20% of time delay and compared the performance in terms of ITAE and TV. Table 6 shows that the proposed method has lower value of ITAE and TV in both conditions nominal and perturbed for set-point as well as in load change.
Table 4 PID parameters and performance parameters for servo as well as regulatory problem of different tuning methods for Example 4


Figure 9 Closed-loop (a) and corresponding control action response (b) of various tuning methods (Example 4)
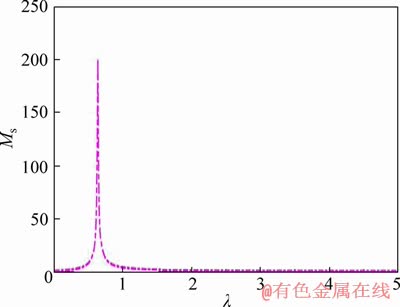
Figure 10 Plot of Ms against �� for Example 5
Table 5 PID parameters and performance parameters for servo as well as regulatory problem of different tuning methods for Example 5
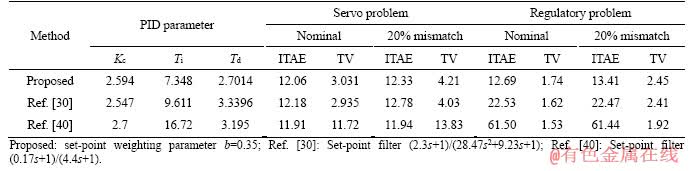
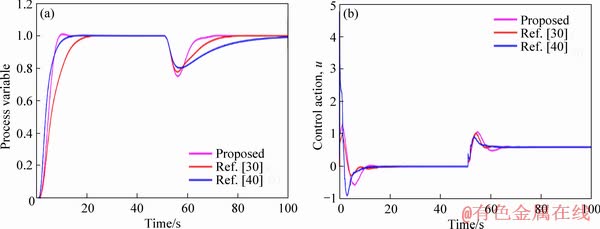
Figure 11 Closed-loop (a) and corresponding control action response (b) of various tuning methods (Example 5)
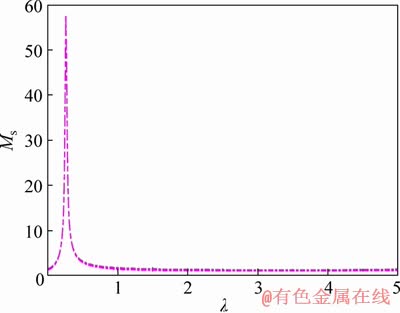
Figure 12 Plot of Ms against �� for Example 6
Table 6 PID parameters and performance parameters for servo as well as regulatory problem of different tuning methods for Example 6
4 Conclusions
The proposed IMC-PID controller is applied successfully on different types of second-order stable, unstable and integrating processes. A suitable value of �� is selected from a plot of Ms value against ��. The model uncertainties are also studied by introducing a perturbation into different model��s parameters, and the robustness of the controller is studied. Closed-loop performance of the controller in terms of time integral error ITAE and control action TV is better than the other methods for all simulation results.
Acknowledgments
The authors are grateful to the department of chemical engineering, Indian Institute of Technology (BHU) for providing lab to conduct the research work and Ministry of Human Resource Development, India (MHRD, India) for providing financial support.
References
[1] Boukhalfa G, Belkacem S, Chikhi A, Benaggoune S. Genetic algorithm and particle swarm optimization tuned fuzzy PID controller on direct torque control of dual star induction motor [J]. Journal of Central South University, 2019, 26(7): 1886-1896. DOI: 10.1007/s11771-019-4142-3.
[2] Panda R C, Yu C C, Huang H P. PID tuning rules for sopdt systems: Review and some new results [J]. ISA Transactions, 2004, 43(2): 283-295. DOI: 10.1016/S0019- 0578(07)60037-8.
[3] Sree R P, Chidambaram M. Control of unstable systems [R]. Oxford, UK: Alpha Science Int'l Ltd., 2006.
[4] Nikita S, Lee M. Control of a wastewater treatment plant using relay auto-tuning [J]. Korean Journal of Chemical Engineering, 2019, 36(4): 505-512. DOI: 10.1007/s11814- 019-0225-y.
[5] Khan O, Madhuranthakam C M R, Douglas P, Lau H, Sun J, Farrell P. Optimized PID controller for an industrial biological fermentation process [J]. Journal of Process Control, 2018, 71: 75-89. DOI: 10.1016/j.jprocont. 2018.09.007.
[6] Ziegler J G, Nichols N B. Optimum settings for automatic controllers [J]. Trans ASME, 1942, 64(11): 759-765.
[7] Cohen, Coon G. Theoretical consideration of retarded control [J]. Trans ASME, 1953, 75: 827-834.
[8] Chen D, Seborg D E. PI/PID controller design based on direct synthesis and disturbance rejection [J]. Industrial & Engineering Chemistry Research, 2002, 41(19): 4807-4822. DOI: 10.1021/ie010756m.
[9] Seborg D E, Mellichamp D A, Edgar T F, Doyle III F J. Process dynamics and control [M]. John Wiley & Sons, 2010.
[10] Rao A S, Rao V, Chidambaram M. Direct synthesis-based controller design for integrating processes with time delay [J]. Journal of the Franklin Institute, 2009, 346(1): 38-56. DOI: 10.1016/j.jfranklin.2008.06.004.
[11] Chien I L. Consider IMC tuning to improve controller performance [J]. Chem Eng Prog, 1990, 86: 33-41.
[12] Rivera D E, Morari M, Skogestad S. Internal model control: PID controller design [J]. Industrial & Engineering Chemistry Process Design and Development, 1986, 25(1): 252-265. DOI: 10.1021/i200032a041.
[13] Skogestad S. Simple analytic rules for model reduction and Pid controller tuning [J]. Journal of Process Control, 2003, 13(4): 291-309. DOI: 10.1016/S0959-1524(02)00062- 8.
[14] Wang Q, Lu C, Pan W. IMC PID controller tuning for stable and unstable processes with time delay [J]. Chemical Engineering Research and Design, 2016, 105: 120-129. DOI: 10.1016/j.cherd.2015.11.011.
[15] Garcia C E, Morari M. Internal model control. A unifying review and some new results [J]. Industrial & Engineering Chemistry Process Design and Development, 1982, 21(2): 308-323. DOI: 10.1021/i200017a016.
[16] Garpinger O, Hagglund T, strom K J. Performance and robustness trade-offs in PID control [J]. Journal of Process Control, 2014, 24(5): 568-577. DOI: 10.1016/j.jprocont.2014.02.020.
[17] Shamsuzzoha M, Lee M. IMC-PID controller design for improved disturbance rejection of time-delayed processes [J]. Industrial & Engineering Chemistry Research, 2007, 46(7): 2077-2091. DOI: 10.1021/ie0612360.
[18] Shamsuzzoha M, Lee M. Design of advanced PID controller for enhanced disturbance rejection of second-order processes with time delay [J]. AIChE Journal, 2008, 54(6): 1526-1536. DOI: 10.1002/aic.11483.
[19] Tchamna R, Qyyum M A, Zahoor M, Kamga C, Kwok E, Lee M. Analytical design of constraint handling optimal two parameter internal model control for dead-time processes [J]. Korean Journal of Chemical Engineering, 2019, 36(3): 356-367. DOI: 10.1007/s11814-018-0215-5.
[20] Morari M, Zafiriou E. Robust Process Control [M]. New Jersey: Prentice-Hall Inc., 1989.
[21] Zhao Z c, Liu Z y, Zhang J g. IMC-PID tuning method based on sensitivity specification for process with time-delay [J]. Journal of Central South University of Technology, 2011, 18(4): 1153-1160. DOI: 10.1007/s11771-016-3226-6.
[22] Deniz F N, Tan N, Hamamci S E, Kaya I. Stability region analysis in smith predictor configurations using a Pi controller [J]. Transactions of the Institute of Measurement and Control, 2015, 37(5): 606-614. DOI: 10.1177/0142331214539991.
[23] Kwon W H, Ryu K H, Hwang J A, Kim K H, Lee J H, Sung S W. Development of batch proportional-integral- derivative controller [J]. Korean Journal of Chemical Engineering, 2018, 35(6): 1240-1246. DOI: 10.1007/ s11814-018-0024-x.
[24] Darwish N M. PID controller design in the frequency domain for time-delay systems using direct method [J]. Transactions of the Institute of Measurement and Control, 2018, 40(3): 940-950. DOI: 10.1177/0142331216675400.
[25] Begum K G, Rao A S, Radhakrishnan T. Maximum sensitivity based analytical tuning rules for PID controllers for unstable dead time processes [J]. Chemical Engineering Research and Design, 2016, 109: 593-606. DOI: 10.1016/ j.cherd.2016.03.003.
[26] Arrieta O, Vilanova R. Simple servo/regulation proportional�Cintegral�Cderivative (PID) tuning rules for arbitrary M S-Based robustness achievement [J]. Industrial & Engineering Chemistry Research, 2012, 51(6): 2666-2674. DOI: 10.1021/ie201655c.
[27] Chu M, Xu C, Chu J. Graphic IMC-PID tuning based on maximum sensitivity for uncertain systems [J]. Transactions of the Institute of Measurement and Control, 2018. 0142331218775491. DOI: 10.1177/0142331218775491.
[28] Begum K G, Radhakrishnan T, Rao A S, Chidambaram M. IMC based PID controller tuning of series cascade unstable systems [J]. IFAC-Papers Online, 2016, 49(1): 795-800. DOI: 10.1016/j.ifacol.2016.03.154.
[29] Dasari P R, Alladi L, Rao A S, Yoo C. Enhanced design of cascade control systems for unstable processes with time delay [J]. Journal of Process Control, 2016, 45, 43-54. DOI: 10.1016/j.jprocont.2016.06.008.
[30] Begum K G, Rao A S, Radhakrishnan T. Enhanced IMC based PID controller design for non-minimum phase (Nmp) integrating processes with time delays [J]. ISA Transactions, 2017, 68: 223-234. DOI: 10.1016/j.isatra.2017. 03.005.
[31] Begum K G, Rao A S, Radhakrishnan T. Optimal controller synthesis for second order time delay systems with at least one RHP pole [J]. ISA Transactions, 2018, 73: 181-188. DOI:10.1016/j.isatra.2017.12.025.
[32] Shamsuzzoha M. Robust PID controller design for time delay processes with peak of maximum sensitivity criteria [J]. Journal of Central South University, 2014, 21(10): 3777-3786. DOI: 10.1007/s11771-014-2362-0.
[33] Matausek M R, Ribic A I. Control of stable, integrating and unstable processes by the modified smith predictor [J]. Journal of Process Control, 2012, 22(1): 338-343. DOI: 10.1016/j.jprocont.2011.08.006.
[34] Kumar M, Prasad D, Giri B S, Singh R S. Temperature control of fermentation bioreactor for ethanol production using IMC-PID controller [J]. Biotechnology Reports, 2019, 22: e00319. DOI: 10.1016/j.btre.2019. e00319.
[35] Alfaro V M, Vilanova R, Arrieta O. Maximum sensitivity based robust tuning for two-degree-of-freedom proportional-integral controllers [J]. Industrial & Engineering Chemistry Research, 2010, 49(11): 5415-5423. DOI: 10.1021/ie901617y.
[36] Anusha A, Rao A S. Design and analysis of IMC based PID controller for unstable systems for enhanced closed loop performance [J]. IFAC Proceedings Volumes, 2012, 45(3): 41-46. DOI: 10.3182/20120328-3-IT-3014.00007.
[37] strom K J, Hagglund T. PID controllers: Theory, design, and tuning [M]. Research Triangle Park, NC: Instrument Society of America, 1995.
[38] Uma S, Chidambaram M, Rao A S. Set point weighted modified smith predictor with PID filter controllers for non-minimum-phase (NMP) integrating processes [J]. Chemical Engineering Research and Design, 2010, 88(5, 6): 592-601. DOI: 10.1016/j.cherd.2009.09.008.
[39] Cho W, Lee J, Edgar T F. Simple analytic proportional-integral-derivative (PID) controller tuning rules for unstable processes [J]. Industrial & Engineering Chemistry Research, 2013, 53(13): 5048-5054. DOI: 10.1021/ie401018g.
[40] Kumar D S, Sree R P. Tuning of Imc based PID controllers for integrating systems with time delay [J]. ISA Transactions, 2016, 63: 242-255. DOI: 10.1016/j.isatra.2016. 03.020.
[41] Shamsuzzoha M. A unified approach for proportional-integral-derivative controller design for time delay processes [J]. Korean Journal of Chemical Engineering, 2015, 32(4): 583-596. doi: 10.1007/s11814-014-0237-6.
(Edited by HE Yun-bin)
���ĵ���
����ȶ��Ͳ��ȶ�����ʱ���̵�IMC-PID�����������ܸĽ����
ժҪ����Բ��ȶ�����ʱ��ϵͳ�������һ�־�������Ӧ(RHP��)���Ե�IMC-PID��������ͨ��Ms�ͦ�ͼ������ʵĵ��Ų����ˣ�ʹ���ܺ�³����֮��ﵽƽ�⡣��������ѡȡ�����ֲ�ͬ��ʽ�Ĺ���ģ�ͣ�˵���˸÷����������ԡ�ͨ��ITAE���ܱ��TV��������������ܣ�������������ĵ��Ź�����бȽϡ�ͨ��ʹ�����õ��Ȩ��������������Ҫ�ij�����ͨ���Ը�ģ�Ͳ��������㶯����֤�˿�������³���ԡ��ջ����ƽ������������ƵĿ�������ģ�Ͳ�ȷ���������¾��н�ǿ��³���ԡ���������������ķ�����ȣ��÷������и��õıջ���Ӧ��
�ؼ��ʣ���������ȣ��ڲ�ģ�Ϳ��ƣ����ȶ����̣��趨ֵ��Ȩ��ITAE
Received date: 2018-10-24; Accepted date: 2019-09-03
Corresponding author: Ram Sharan SINGH; Tel: +91-9450119379; E-mail: rssingh.che@itbhu.ac.in; ORCID: 0000-0001-6385-489x
Abstract: An IMC-PID controller was proposed for unstable second-order time delay system which shows the characteristics of inverse response (RHP zero). A plot of Ms versus �� was suggested to calculate the suitable tuning parameter ��, which provides a trade-off between performance and robustness. Six different forms of process models were selected from literature to show the applicability of the present method. Performance of controller was calculated by ITAE and total variation TV and compared with recently published tuning rules. Undesirable overshoot was removed by using a set-point weighting parameter. Robustness was tested by introducing a perturbation into the various model parameters and closed-loop results show that the designed controller is robust in the case of model uncertainty. The proposed method shows an overall better closed-loop response as compared to other recently reported methods.
