
6���ɶ���̨MIMOǰ���������Ż����
�����֣���־�������ң���ǿ��̷����
(��������ҵ��ѧ ����ѧԺ�������� ��������150001)
ժ Ҫ��
̨��ɨ��������������Ƭ�ع�����в��ϱ仯�����⣬���һ��MIMOǰ�������Ż���������߸��پ��ȡ�����6���ɶ���̨�Ķ���ѧģ�ͣ���ģ���е�ɨ��λ����Ͻ��н������ţ�ٷ���MIMOǰ�����������������Ż���ʵ�ֲ�����ɨ������仯���Զ������Ĺ��ܡ���Ʒ�����PID�����������ϵͳ�Ե�Ƶ���źŵ���Ӧ��������������������MIMOǰ�������������Ż����پ���������ߡ�����ں㶨����������ع�ɨ��ʱ����ڷ�ֵ����С74.97%��λ��ƫ����ƶ�ƽ����ͱ���ֱ��С60.02%��76.30%��
�ؼ��ʣ�
MIMOǰ������; ţ�ٷ�; ������PID; ��̨��
��ͼ����ţ�TP273+.2 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0399-07
Optimal design of MIMO feed-forward controller for 6-DOF micro stage
CHEN Xing-lin, WU Zhi-peng, WANG Yan, TANG Qiang, TAN Li-guo
(School of Astronautics, Harbin Institute of Technology, Harbin 150001, China)
Abstract: With the aim to resolve the problem that the scanning fields of the micro stage continuously change during the exposure process of the whole scion wafer, an optimization design method for the MIMO feed-forward controller that can improve the tracking accuracy was proposed. The dynamic model of the 6-DOF micro stage was established and the scanning fields coupling of the model was decoupled. The parameters of the MIMO controller were optimized based on the Newton method, and the function of parameters automatically adjusted with the changing of scanning fields is realized. Nonlinear PID controllers were designed to improve the tracking effect at low frequencies. The simulation results show that the tracking precision increases evidently when the parameters of the MIMO feed-forward controller are optimized. During the exposure process, the maximum position error decreases by 74.97%, and the moving mean difference and the moving standard deviation of the position error decrease by 60.02% and 76.30%, respectively.
Key words: MIMO feed-forward control; Newton method; nonlinear PID; micro stage
��̻���һ�ּ��ɵ�·�����豸������ɨ��ʽ��̻���Ŀǰ�����Ĺ�̻����͡����Ű뵼������ҵ�IJ��Ϸ�չ��оƬ�ļ��ɹ�ģ���̾��Ȳ������ӣ��عⷽʽҲ�Ӹ�ʽ��չ����ûʽ��Ŀǰ�Ѿ���32 nm�ڵ�ʵ����оƬ������������ASML��˾��TWINSCANϵ�н�ûʽ��̻��ǵ����߶˹�̻��豸�Ĵ���[1-2]������̨�ǹ�̻��豸����Ҫ��ɲ���֮һ������̨�ɺ궯̨����̨��ɣ��ֱ�ʵ�������������ȣ���̨��һ��6���ɶ��˶�ƽ̨��
��̨�Ŀ��Ʒ������÷������Ƽ�ǰ�����ƵĽṹ������������һ��Ϊ�����ݲ�����PID��������Ϊ���ϵͳ�Ķ�̬���ԣ�������PID(Nonlinear PID, N-PID)���������뵽����ϵͳ��[3-4]��ǰ�������������Ŀ�������ϵͳ�ľ��ȡ���ͳ���ٶ�ǰ���������ñ��ض������������ת���������м���[5-6]��������ַ�����Ҫ�Ա��ض���ȷ��ģ�����ҵ���ȷ���Ժܴ�ʱ��ǰ����������Ч���ᱻ����[7]������ɨ���̻��������ع�ķ�ʽ�Թ�Ƭ�ع⣬ɨ��λ�ò��ϱ仯����������������أ���̬��Ƶ�ǰ����������������Ҫ����Ҫ��ɨ������в��϶Բ��������Ż����¡�ͨ������ѧϰ��(Iterative Learning Control, ILC)��Ƶ�ǰ�����������ԶԲ��������Ż�[8-9]�������ر��ʺϹ�̻����־��кܸ��ظ��Եij��ϡ�����������(Iterative Feedback Tuning, IFT)���Ը��ݲ�����Ϣ��Ŀ�꺯���Կ��������������Ż��������ַ��������ڷ�������������ƣ��������ַ������ܹ�����ǰ���������ľ���ṹ[10-11]��
�������������̨ɨ��λ�ò��ϱ仯���ص㣬���ILC��IFT�����˼�룬��6���ɶȵ���̨ϵͳ�����MIMOǰ��������������ͨ��ţ�ٷ��Կ����������������Ż�����ÿ���ع�ɨ��ʱMIMOǰ������������������Ż�������һ��ɨ����ʹ�õIJ��������Ż���ʹ������������Ƭ�ع�����в����Զ��������Ӷ���߿���ϵͳ�ĸ��پ��ȡ�
1 ��̨��ѧģ��
ͼ1��ʾΪ��̻��ṹ����Ҫ��������̨����ģ̨��ѧ��3���֡�����̨����ģ̨�����ú����ƽṹ���궯̨��ɵ;��ȵĴ��г��˶�����̨��ɸ߾��ȵ�С�г��˶���ִ�л����ֱ�Ϊֱ�ߵ������Ȧ�����Ϊ��Сɨ���˶�ʱ�Կ�ܵ�Ӱ�죬�Ժ궯̨���������ƽ���������̨ϵͳ�IJ�������Ϊ��������Ǻ�λ�ƴ��������ع��Դ����193 nm��ArF���Ӽ��⣬ͨ��4:1��������ģƬ��IC��·ͼ�����䵽���ع��Ƭ�ϣ����ý�ûʽ�عⷽʽ�Թ�Ƭ�����ع⡣
����̨����̨Ϊ6���ɶ��˶�ƽ̨��ִ�л���Ϊ6����Ȧ���������ѧ��ϵ��ͼ2��ʾ�����������F=[f1 f2 f3 f4 f5 f6] T��f2��f3ƽ�У���y������Ϊl1��f4��f5��f6�����������Σ����Ұ�װ3��������������f5��f6��x������Ϊl2��������̨�����ĺͼ��������غϣ�FgΪ��̨�����ܵ������ã�
Fg=LF (1)
����
 (2)
(2)

ͼ1 ��̻��ṹʾ��ͼ
Fig.1 Schematic diagram of lithography equipment
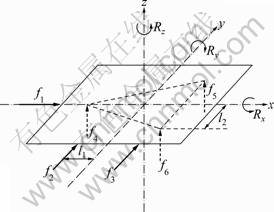
ͼ2 ��̨����ѧģ��
Fig.2 Dynamic model of micro stage
F������O�Ķ���ѧ����Ϊ��
![]() (3)
(3)
���У�YgΪ��̨������λ�ƣ�P(s)Ϊ��̨��Ƶ�ݺ�����
 (4)
(4)
��Ƭֱ��Ϊ300 mm���������عⷽʽ�ع⣬������Ƭ�����Ҫ������оƬ��С���ֳ������ع�ⳡ���账�ڲ�ͬ�ⳡ��λ��ΪYs=(xs, ys, zs)��ɨ��ʱ�Թ� ������Ϊԭ���λ�����ΪY=[x y rz z rx ry] T����ͼ3��ʾ����ɨ��λ������̨����λ�ù�ϵΪ
Y=Q(Ys)Yg (5)
Q(Ys)�ǹ�ϵ������ʽΪ��
 (6)
(6)
���У�qx,s=xs+xoffset��qy,s=ys+yoffset��qz,s=zs+zoffset����̨�������Ƭ���ĵ�λ��ƫ����Ϊ(xoffset, yoffset, zoffset)��Q(Ys)��ɨ�������λ���йأ���������Ƭȫ���ع�����У�Q(Ys)�Dz��ϱ仯�ġ�

ͼ3 ��̨��ɨ��λ���˶���ϵ
Fig.3 Graphical representation of motion relation between micro stage and scanning fields
��ʽ(3)��ʽ(5)�ɵñ��ض���Ƶ��ģ��Ϊ
H(s)=Q(Ys)P(s)L (7)
ʵ������̨��3��ת�������Ը�������������÷����3��ƽ�Ʒ����λ���������������ã���������̨ƽ����ת���ķ�Χ���dz�С����2����ϵ�Ӱ��ԶԶС��ɨ��λ���������ϣ��ʱ�����ʱ��������2�����Ӱ�졣
2 ����ϵͳ�ṹ�����������
����ʽ(7)��������̨ģ�͵�6�����ɶ�֮�������ϣ�����Ҫ���н������������Ϊ
![]()
 (8)
(8)
���ڲ�ͬ��ɨ�������ص�6�����ɶȵ�λ�����������6��SISOϵͳ���ɣ�����Ϊ��
![]() (9)
(9)
���У�FctrlΪSISO�������ṩ�Ŀ�����������PID���ƺͳ�����ٶ�ǰ�����ü��ٶ�ǰ��ֻ����x��y��z��3��ƽ�Ʒ���H(s)L-1G(Ys)��һ��6�ĶԽǴ��ݺ����ֱ��Ӧ��̨��6�����ɶȣ��ɴ˿�ʵ�ֶ���̨�Ľ���������ֽ��������һ��ȱ�ݣ��ڸ�Ƶ��ϵͳ��������ػ���[12]����������SISO������������ʵ��Ҫ��Ŀ���Ч�����ʼ�����MIMOǰ���������������ع�ɨ��λ��Ϊ�ǹ̶��㣬����ת�������ǰ������ƽ�Ʒ�������ȡ����ɨ��λ�õĶ���ƫ���MIMOǰ��������������ͬ������3��ƽ�Ʒ���ο��źŵļ��ٶ�[13]��
ʵ���в������ֿ��Ʒ�������ɢ����ϵͳ��ͼ4��ʾ��H(z)Ϊʽ(7)����ɢ��ʽ��Cfb(z)Ϊ������PID��������CffΪSISO���ֵļ��ٶ�ǰ����������CmimoΪMIMOǰ����������YrefΪ����6�����ɶȵIJο�λ�������źţ�aref=[ax,ref, ay,ref, az,ref] TΪ3��ƽ�Ʒ���ļ��ٶ��źš�

ͼ4 ����ϵͳ��ͼ
Fig.4 Block diagram of the control system
��A(z)�ǴӲο�λ���źż���3��ƽ�Ʒ�����ٶ����������ɢ�Ķ������������ͨ��ŷ����ʵ��[10]��TΪ�������ڣ���
![]() (10)
(10)
����
 (11)
(11)
2.1 MIMOǰ�����������
ͼ4��MIMOǰ��������Cmimo=(��ij)6��3��j![]() {x, y, z}��i
{x, y, z}��i![]() {x, y, rz, z, rx, ry}����Cmimo����������������
{x, y, rz, z, rx, ry}����Cmimo����������������
��=vec(Cmimo) (12)
����ָ�꺯����
![]() (13)
(13)
6�����ɶȵ�λ��ƫ��Ϊ
![]()
![]() (14)
(14)
���У�![]() Ϊϵ������
Ϊϵ������![]() ��
��![]() ��
��![]() �Ǵ�ת�����㵽ƽ�Ƶij߶�ϵ����lΪ������������l�ε�����Ӧ������Ƭ�ĵ�l��ɨ������l=1, 2, ��, N��NΪ������Ƭ�����ع�ɨ���˶��Ĵ�����
�Ǵ�ת�����㵽ƽ�Ƶij߶�ϵ����lΪ������������l�ε�����Ӧ������Ƭ�ĵ�l��ɨ������l=1, 2, ��, N��NΪ������Ƭ�����ع�ɨ���˶��Ĵ�����
ǰ�����������Ż��������ʽ(15)������
![]() (15)
(15)
��ʽ(13)����ڦ� l���ݶ�Ϊ
![]() (16)
(16)
Hessian������
![]() (17)
(17)
����ţ�ٷ��ԦȽ��е������㣬��
![]() (18)
(18)
���У���Ϊ����������Ϊ18�ĶԽ���Ϊ����Hessian�������������������µ�����������ʽ(18)�ɸ�дΪ
![]() (19)
(19)
����![]() ��
��
ͨ��ʽ(19)�Բ��������Ż�ʱ����Ҫ![]() ��
��![]() 2��ֵ��
2��ֵ��![]() ����ͨ�������������м��㣬
����ͨ�������������м��㣬![]() ���������淽������õ���
���������淽������õ���
��ͼ4��ϵͳ�ṹ���Ե�λ��ƫ��Ϊ
![]()
![]() (20)
(20)
����![]() ��
��![]() �����졣
�����졣
����ϵ������
![]() (21)
(21)
��
![]() (22)
(22)
ʽ(20)���Ը�дΪ
![]() (23)
(23)
����![]() ��
��
��![]() ��
��![]() ���ݶ�Ϊ
���ݶ�Ϊ
![]()
![]() (24)
(24)
����
![]() ��
��
��ʽ(24)�У�ͨ����l��ɨ�������ڵĿ���������![]() ��ɨ��ⳡ��λ��
��ɨ��ⳡ��λ��![]() ��λ���������ֵY l�����Զ�
��λ���������ֵY l�����Զ�![]() ���м��㡣
���м��㡣
MIMOǰ���������������Ż�����Ϊ��
(1) ���õ�һ��ɨ��ʱ��Ӧ��ǰ��������ϵ����ֵ![]() ��
��
(2) ��ÿ��ɨ��ʱ���ĩ�������![]() ��
��
(3) ����ʽ(13)����![]() �����С��Ԥ��ֵ�ͽ��е�(5)����������е�(4)����
�����С��Ԥ��ֵ�ͽ��е�(5)����������е�(4)����
(4) ����ʽ(19)����![]() ��
��
(5) �Ե����������е��ƣ�l=l+1��
ͨ������������ÿ��ɨ��ʱ���Զ�MIMOǰ���������IJ��������Ż������ƾ��Ⱥ������ܽ����Ŷ�������Ƭɨ���Խ��Խ�á�
2.2 SISO������PID������
Cfb(z)����6�����ɶȵķ������������ɵĶԽǴ��ݺ������÷�����PID���Ʒ��������������Ա���Ϊ
![]() (25)
(25)
���У�PIDi(z)Ϊ����PID����������i[��]Ϊ�����Ժ�����NFi(z)Ϊ�ݲ�����LFi(z)Ϊ��ͨ�˲�����i![]() {x, y, rz, z, rx, ry}��
{x, y, rz, z, rx, ry}��
ʽ(25)�����ķ�����PID���������ŵ��ǣ��������ϵͳ��λ��ƫ���е�Ƶ��������Ӧ�̶ȣ����Ը�Ƶ���ź�������һ���Ĺ������á�
����[3]�в��ô��������ķ����Ժ����������������߽���ƫ����Ͻ綨�壬������ʹ�����Ժ�������ʱ�䴦�������ڲ��������˷����Կ����������á�����Ԧ�i(ei)���иĽ�������Ϊ:
![]() (26)
(26)
���У�hi����iΪ����������hi=1.5����i=2.35ʱ����i(ei)��������ͼ5��ʾ��
SISO���ֵļ��ٶ�ǰ��������Cff��ƱȽϼ����ﲻ��������

ͼ5 �����Ժ�����i(ei)��������������
Fig.5 Gain characteristics of nonlinear function ��i(ei)
3 �������
��̨��6�����ɶ��У�y��ƽ�Ʒ���Ϊɨ�跽�ʷ�������Ҫ����y������ԡ�λ�òο��ź�Ϊ5��S-���ߣ�ɨ����̰�������ʱ��Ρ��ȶ�ʱ��Ρ��ع�ʱ��κͼ���ʱ��Σ�һ������������Ϊ0.3 s�������ع�ʱ���Ϊ0.075��0.225 s��ɨ��ⳡ�Ĵ�С������������Ҫ������оƬ��С�����ķ����28���ⳡ����ɨ�裬�ӹ�Ƭ���¿�ʼ��ʵ�ʹ����й�Ƭ�ع�ɨ������Ĵ�С�������벽��-ɨ��켣��MIMOǰ�������������Ż��㷨������Ӱ�졣
ͼ6��ʾΪ��yx����yy�ͦ�yz 3��������28��ɨ������еı仯���ߡ�ͼ7��ʾΪ�Ż�ָ�꺯��V(��)��y��ƽ�Ʒ����ع�ʱ����ڵķ�ֵƫ��emax,y���Լ�λ������ƽ����MA,y�ͱ���MSD,y�ı仯���ߡ�

ͼ6 ��yx, ��yy�ͦ�yz�ı仯����
Fig.6 Variation curves of ��yx, ��yy, and ��yz

ͼ7 V(��)��y��ƽ�Ʒ���ķ�ֵƫ�ƽ����ͱ���
Fig.7 V(��), emax, y, MA, y and MSD, y of position error in y translational direction
Ϊ��֤��ǰ�������Ż��ı�Ҫ�ԣ���δ���Ż���������Ż����������Աȡ�ͼ8��ʾΪ��28��ɨ���������ع�ʱ����ڵ�y��ƽ�Ʒ���λ��ƫ��Ա����ߣ�ͼ9��ʾΪλ��ƫ����ƶ�ƽ����ͱ����˲ʱ�Ա����ߡ����Կ������������ǰ��ϵ�������Ż������پ��Ȼ��кܴ�Ķ�

ͼ8 y��ƽ�Ʒ���λ��ƫ��
Fig.8 Position tracking error in y translational direction
4 ����
���Ƚ����˹���̨��̨���ֵ�6���ɶȶ���ѧģ�ͣ�����ģ������ִ�������������Ϻ�ɨ��λ���������Ϸֱ�����˽������Ȼ�������̨�˶����кܸߵ��ظ��Ե��ص㣬���õ���ѧϰ����˼�������MIMOǰ������������ÿ��ɨ��ʱ����ţ�ٷ���ǰ�����������������Ż����ﵽ�˸��پ�������ɨ����������Ӷ�������ߵ�Ч�����������˸Ľ��ķ�����PID������������������������ڲ��þ�̬ǰ�������������������ɨ��ʱ����ڵ�y��ƽ�Ʒ����ֵƫ���С��74.97%���ƶ�ƽ����ͱ����С60.02%��76.30%�������Ż������ʹ�ÿ���ϵͳ��λ�ø��پ��ȴ������ߡ�

ͼ9 y��ƽ�Ʒ���λ��ƫ���˲ʱƽ����ͱ���
Fig.9 Instantaneous MA,y and MSD,y of tracking error in y translational direction
�ο����ף�
[1] Ԭ����, ����. ����������̻��з������½�չ[J]. ����������ѧ��չ, 2007, 44(1): 57-64.
YUAN Qiong-yan, WANG Xiang-zhao. Recent development of international mainstream lithographic tools[J]. Laser & Optoelectronics Process, 2007, 44(1): 57-64.
[2] Mulkens J, Klerk J D, Leenders M, et al. Latest developments on immersion exposure systems[C]//Proceedings of SPIE. 2008: 69241P1-69241P12.
[3] Heertjes M F, Schuurbiers X G P, Nijmeijer H. Performance- improved design of N-PID controlled motion systems with applications to wafer stages[J]. IEEE Transactions on Industrial Electronics, 2009, 56: 1347-1355.
[4] Armstrong B, Neevel D, Kusik T. New results in NPID control: Tracking, integral control, friction compensation and experimental results[J]. IEEE Transactions on Control Systems Technology, 2001, 9: 399-406.
[5] Stearns H, Mishra S, Tomizuka M. Iterative tuning of feedforward controller with force ripple compensation for wafer stage[C]//Proceedings of the American Control Control Conference. Seattle, Washington, 2008: 234-239.
[6] Lambrechts P, Boerlage M, Steinbuch M. Trajectory planning and feedforward design for electromechanical motion systems [J]. Control Engineering Practice, 2005, 13(2): 145-157.
[7] Devasia S. Should model-based inverse inputs be used as feedforward under plant uncertainty? [J]. IEEE Transactions on Automatic Control, 2002, 47(11): 1865-1871.
[8] Roover D D, Baogra O H. Synthesis of robust multivariable iterative learning controllers with application to a wafer stage motion system[J]. International Journal of Control, 2000, 73(10): 968-979.
[9] Stearns H, Yu S, Benjamin F, et al. A comparative study of feedforward tuning methods for wafer scanning system[C]// Proceedings of 2008 ASME Dynamic Systems and Control Conference. Ann Arbor, Michigan, USA, 2008: 96-114.
[10] Meulen S H, Tousain R L, Bosara O H, et al. Fixed structure feedforward controller design exploiting iterative trials: Application to a wafer stage and a desktop printer[J]. Journal of Dynamic Systems, Measurement, and Control, 2008, 130: 051006-1-051006-16.
[11] Hjalmarsson H. Iterative feedback tuning��An overview[J]. International Journal of Adaptive Control and Signal Processing, 2002, 16: 373-395.
[12] Heertjes M, Hennekens D, Engelen A V, et al. Dynamic decoupling in motion systems using a gradient approximation- based algorithm[C]//Proceedings of 48th IEEE Conference on Decision an Control and 28th Chinese Control Conference. Shanghai, China, 2009: 16-18.
[13] Baggen M, Heertjes M, Kamidi R. Data-based feed-forward control in MIMO motion system[C]//Proceedings of 2008 American Control Conference. 2008: 3011-3016.
(�༭ ���)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ�����ҿƼ��ش�ר��������Ŀ(2009ZX02207)�������ص�����о���չ�ƻ�(��973���ƻ�)��Ŀ(973-10007.07-LB7)
ͨ�����ߣ���־��(1981-)���У��ӱ��żҿ��ˣ���ʿ�о��������¹�̻�����̨����ϵͳ����о����绰��0451-86400584��E-mail: elva_w@yahoo.
com.cn
ժҪ����Թ���̨��̨��ɨ��������������Ƭ�ع�����в��ϱ仯�����⣬���һ��MIMOǰ�������Ż���������߸��پ��ȡ�����6���ɶ���̨�Ķ���ѧģ�ͣ���ģ���е�ɨ��λ����Ͻ��н������ţ�ٷ���MIMOǰ�����������������Ż���ʵ�ֲ�����ɨ������仯���Զ������Ĺ��ܡ���Ʒ�����PID�����������ϵͳ�Ե�Ƶ���źŵ���Ӧ��������������������MIMOǰ�������������Ż����پ���������ߡ�����ں㶨����������ع�ɨ��ʱ����ڷ�ֵ����С74.97%��λ��ƫ����ƶ�ƽ����ͱ���ֱ��С60.02%��76.30%��
