

DOI�� 10.11817/j.issn.1672-7207.2020.06.005
����˫��Һѹ��ƫ�����;���������
ӝҫ��1,��˫·1,½��2,ԭ����1,Фǿ2
��1. ͬ�ô�ѧ ��е����Դ����ѧԺ���Ϻ���200092��
2. �й������������ƿƼ�����˾������ ������130102��
ժ Ҫ��
�������õIJ���˫��Һѹ�״��ڲ�����ĥ����˶����������⣬����Һѹ����ѧģ�ͺ͵�Ч����ѧģ�ͣ��о���ͬ���ء���ͬ���ڿ�����ƫ�����Լ��������Ͳ���������뵼����֮��ľ������仯������о�������������⸺��һ��ʱ��ƫ�����뷧�ڿ��Ƚ��Ƴʶ��κ�����ϵ�������ڿ���һ��ʱ��ƫ�������⸺�س����Թ�ϵ���ڿ��������£�ƫ�ػ��2�������˵��˶�˳�����Ӱ�죻���⸺�������£������ṹ���α䵼�¾������IJ�����2�������˵�����ƫ�ضԾ�����Ӱ���С���������Ͳ֮��ľ���������������������������������뵼����֮��ľ������������������������ȼ�С��������Һѹ��֮��Ĵ��������Խ��2�������˵�����ƫ����ԽС�������������ӿ��Ȼ��߲��øߵ���ģ���IJ��Ͽ�����Ч�ؽ���Һѹ�ľ�����������ƫ������2���������˶�˳���Ӱ�죬ʵ���������۽�������
�ؼ���:˫��Һѹ�ף�ƫ���������������˶�״̬���������ṹ
��ͼ�����:TH137 ���ױ�־��:A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±��:1672-7207��2020��06-1509-09
Analysis of offset load force and radial force of parallel double rods hydraulic cylinder
YIN��Yaobao1, LI��Shuanglu1, LU��Chang2, YUAN��Jiayang1, XIAO��Qiang2
(1. School of Mechanical Engineering, Tongji University, Shanghai 200092, China��
2. China Aero-Engine Changchun Control Technology Co. Ltd., Changchun 130102, China)
Abstract: Aiming at the problem of uneven wear and jitter in parallel double rods hydraulic cylinder of aircraft vector nozzle engine, the mathematical model and equivalent statics model of the cylinder were established. The variation of radial force between piston and cylinder, piston rod and guide sleeve as well as offset load force under different loads and valve openings were studied. The results show that when the external load is constant, the offset load force has a quadratic function relationship with the valve opening. When the valve opening is constant, the offset load force has a linear relationship with the external load. And the offset load force affects the motion order of the two piston rods under the condition of no load. The deformation of parallel structures under external loads results in radial forces, and the offset load force has little influence on the radial force. When the piston rod extends, the radial force between the piston and the cylinder increases gradually, while the radial force between the piston rod and the guide sleeve decreases first and then increases. The larger the area of series holes between parallel hydraulic cylinders is, the smaller the axial bias load of the two piston rods is. The radial force of hydraulic cylinder can be effectively reduced by increasing the thickness of connecting block or adopting the material with high elastic modulus. Concerning the influence of offset load force on the motion order of two piston rods, the theoretical results are consistent with the experimental results.
Key words: double rods hydraulic cylinder; offset load force; radial force; motion state; statically indeterminate structure
Ϊ�����������ռ���ʵ�ִ�������������Ҫ�����շ�����ʸ������ϵͳ���������������ϵͳ�ռ䲼�ֺͽṹ����Ҫ����һ��˫�˲�����еͬ��Һѹ��[1]����Һѹ�������2����Ͳ��2��������ͨ�����ӿ�ʵ�ֻ�еͬ����ͨ�������ϵĴ�����ʵ��2��Һѹ����·��ͨ���ýṹʵ����Һѹ�ı�ƽ����ƣ�ͬʱ���㸺��������ʵ���з��ָ�Һѹ���д����������⣺һ��Һѹ�ĵ����״��ͻ����ϴ����Ų�����ĥ�𣬶��ǻ��������˶����յ�ʱ���ڶ���������������Ӱ�쵽Һѹ�����������Ϳɿ��ԣ��������ŷ�����ϵͳ�İ�ȫ��Ϊ����ߵ�Һ�ŷ�ϵͳ�Ŀɿ��ԣ����Ϸ��������а�ȫ�����Һѹ��������������о�����������Һѹ��ĥ��Ͷ�����Һѹ�������˶����յ㶶��������2�������˵��˶���ͬ����ɵģ��ڴ�ͳ��˫���������У����ǶԸ������о��϶࣬����ͨ�����ֿ��Ʋ������2�������˵�ͬ����[2-5]����Һѹ�׳��ܵľ�������ʹ�����ͻ�������������ĥ��[6]���о�������Һѹ������5%��ĥ���ʹҺѹ�ij�����������Լ10%[7]��Ϊ�����Һѹ����������������ѹ֧�ŵȷǽӴ��ܷ���ʽ��Һѹ���еõ��˹㷺Ӧ��[8-11]��Һѹ��ģ���˶������е��غ��о����Ż�ҺѹԪ�������Һѹϵͳ���ܵĻ������ܵ����ǹ㷺��ע[12-14]������������Բ���˫��Һѹ���е�ƫ�����;��������⣬����Һѹ����ѧģ�ͺͳ�������ѧģ�ͣ�̽��Ӱ��Һѹ��ƫ�����;������Ĺؼ��ṹ�������Ա�Ϊ�Ż�������Һѹ�Ľṹ�������乤���еľ�������ƫ���������Һѹ�������ԺͿɿ����ṩ���ݡ�
1 ����˫��Һѹ����ѧģ��
1.1������˫��Һѹ����ԭ��
ͼ1��ʾΪ����˫��Һѹ�Ľṹʾ��ͼ���������ռ�����ƣ�����Һѹ����ͣ���Һͨ�����ں���ǻ�ı��ڿ����ν���Һѹ������ǻ������ǻ���ƶ��������˶������и�ǻ����Һͨ������֮��ı��ڿ״����и�ǻ���ͣ��˽ṹ�����˹�·���ӣ������Ժã����ɶȸߣ���װ�ߴ�С��������ṹ����·�ص㣬����˫��Һѹ�״����������⡣
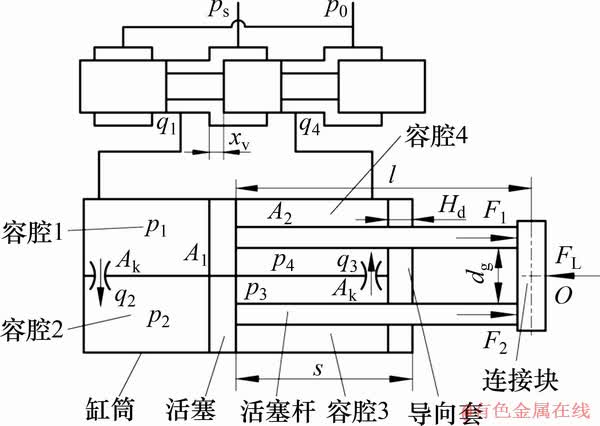
ͼ1������˫��Һѹ�ṹʾ��ͼ
Fig. 1��Schematic diagram of parallel double rods hydraulic cylinder
1) ��Һѹ�ṹ�������ƣ�����֮��Ĵ��������ͳߴ��ܵ����ƣ������Ľ�������ʹ�û��������˶�������2����ǻ���и�ǻ֮�����ѹ��Ӷ�ʹ��2�������˳��ܵĸ�������һ�¶�����ƫ�أ�Һѹ��2�����������˶�ʱ����ȫͬ�������˶����յ�ʱ���ڶ�������
2) �������ӿ��ܵ����⸺������2�������˶���������������ߣ��ᵼ�����ӿ�ͻ����˷������Σ�ʹ�������뵼���ס��������Ͳ֮����ںܴ�ľ��������Ӿ����ܷ�ṹ�IJ�����ĥ��[15]��
1.2������˫��Һѹ����ѧģ��
���ݲ���Һѹ�Ĺ���ԭ��������Һѹ����Һѹ��֮���ѹ���Լ�Һѹ��й©����Һѹ���������ʱ��Һѹ��2�������ڵ�����q1��q4����ʽΪ��


�ϡ���Һѹ��֮��2�����ڴ���������q2��q3����ʽΪ��


ʽ�У�psΪ����ѹ����p0Ϊ����ѹ����p1��p2��p3��p4�ֱ�Ϊ��ǻ1~4��ѹ����wΪ��������ݶȣ�xvΪ���ڿ��ȣ�Cd1��Cd2�ֱ�Ϊ��������������ϵ���ͱ��ڴ���������ϵ����Ϊ�˱��ڼ���ƫ������ȡ������ȣ���ΪCd����Ϊ��Һ���ܶȣ�AkΪ��������֮�䴮����ͨ�������
��ǻ1~4�����������Է��̷ֱ�Ϊ




ʽ�У�A1Ϊ��������ǻ�����A2Ϊ�������и�ǻ�����
���Ի������˶�ʱ��Ħ����������ţ���˶����ɣ����»����˼����ӿ����������ƽ�ⷽ��Ϊ



ʽ�У�F1��F2�ֱ�Ϊ������1�ͻ�����2���ܵĸ�������FLΪ���ӿ���ܵ��⸺�ء�
ͬ�����Եõ�������������ʱ����ѧģ�ͣ�������ֵ��ⷽ���о�����˫��Һѹ��ƫ�����;�������ģ���е���Ҫ�������1��ʾ��
��1������Һѹ����ѧģ����Ҫ����
Table 1��Main parameters of mathematical model of hydraulic cylinder controlled by valve
2 Һѹ��ƫ�����;��������۷���
2.1��Һѹ��ƫ����
2.1.1��ƫ�������������
��ͼ1��ʾ�������⸺��FL�������������ӿ�����Ľ���ΪO�㣬����2�������˳��ܵĸ�������һ�»������O���ƫ�����أ�ƫ�����ؿ������»����˳��ܵ�����������ֵ����������2�������˵�����������ֵΪƫ������F����

��ʽ(5)~(8)�ɵã�

��ʽ(9),(10)��(12)�ɵã�

���ʽ(6)��(7)��(13)�ɵû��������ʱƫ�����뷧�ڹ�������

ʽ�У�nΪҺѹ�IJ��Գ�ϵ����n=A2/A1��nԽС����ʾ���Գƶ�Խ��ͨ��ʽ(1)��(10)���Խ�һ���õ���ǻ�������⸺��


��ʽ(16)����ʽ(15)�ɵõ����������ʱƫ������Fs�ı���ʽΪ

ͬ���ɵû����˴�������״̬�µ�ƫ������Fd����ʽΪ

��ʽ(17)��ʽ(18)���Է��֣���������ͨ�����������Ч�ؽ���ƫ�����������ڷ��ڵ�ͨ�����ԶԶС�ڴ�����ͨ�������ʽ(18)��ĸ�еĵ�1����Ժ��ԣ���ƫ�����ͷ��ڿ��Ƚ��Ƴʶ��κ�����ϵ����ͬ������ƫ�����淧�ڿ��ȵı任�����ͼ2��ʾ����ͼ2���Կ�������ͬ�������£����ڿ���Խ��ƫ����Խ�����ڿ���Ϊ��ʱ��������������ϻ����˳��ܵĸ������������ڿ���Ϊ��ʱ�����������أ���ʱ��ƫ����Ϊ��ֵ�������»����˳��ܵĸ���������
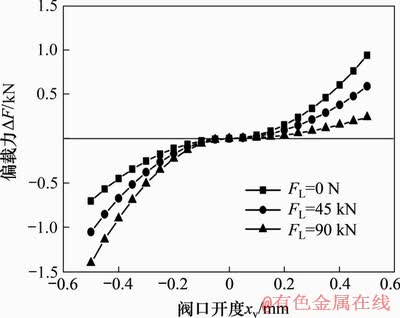
ͼ2����ͬ���ڿ����µ�ƫ����
Fig. 2��Offset load force under different valve openings
�����ڿ��ȹ̶�ʱ��ƫ�������⸺�����Ĺ�ϵ��ͼ3��ʾ�����⸺��FL���������FmaxΪ��ֵ��������λ�����С�����Fmin���������Fmax����ʽ���£�


��ͼ3���Կ�����ƫ�������س����Թ�ϵ���ڷ��ڿ���Ϊ��ʱ�����Ÿ���������С�����������������С�������������ѹ���С��ƫ������С���ڷ��ڿ���Ϊ��ʱ�����Ÿ�������0 N�������������������������ѹ��Ҳ������ƫ������0 N�����ӡ�
ͼ3����ͬ���������µ�ƫ����
Fig. 3��Offset load force under different loads
2.1.2��ƫ�����Ի������˶�˳���Ӱ�졡
��Һѹ������ʱ��ƫ������Ӱ�����»������˶���˳���������»������ܵ���Һѹ�������Ħ����������װ���ӿ�ʱ����Һѹ�Ĺ���ԭ����֪��
1) ������Һ��������Һѹ�ף����»������˶�ʱ���ϻ������ܵ���Һѹ��ʼ�մ����»������ܵ���Һѹ������
2) ���»����˲��˶�ʱ��������ǻ֮����ѹ���ʱ�����»������ܵ���Һѹ����ͬ����
���ϻ������ܵ���Һѹ��




�ɵ�

�������»������ܵ������Ħ����֮��

���»������ܵ���Һѹ��

��ˣ����»��������˶�ʱ��ƫ���������Ħ����֮����Ҫ���������Ϊ

���ϻ������ܵ���Ħ����С���»����˵�Ħ������
��

�����������ɵ����»������˶�˳�����仯���ٽ�����Ϊ

���ʽ(1)��(2)��(3)��(4)��(12)�ɵ������»��������˶�����ǻ�������ٽ�ֵ


���»��������ʱ��

�ɴ˿ɵ��»��������˶�ʱ���ڿ��ȵ��ٽ�ֵ

����


ͬ��������������ʱ���ɵ������»��������˶����ٽ緧�ڿ���Ϊ

����1�в�������ʽ(30)��(31)���Է��֣������Ħ������ͬʱ�������˴�������״̬ʱ���ٽ緧�ڿ��ȱȻ����˴������ʱ���ٽ緧�ڿ����Դ������ӿ�ʱ�����ϻ����˵����Ħ���������»��������Ħ���������ڿ��ȴ����ٽ�ֵʱ�����»�����ͬʱ�˶��������ڿ���С���ٽ�ֵʱ���»��������˶��������ϻ����˵����Ħ����С���»��������Ħ�����������۷��ڿ��ȴ�С�������ϻ��������˶����������»����˱����ӿ�����ʱ��2�������˵��Ⱥ��˶������1��������ͨ�����ӿ��϶�����1���������˶������ǵ�2�������˺�Ͳ�Լ�������֮�����ϼ�϶����2�����������Ⱥ��뵼���Ӵ�ʱ��ᵼ�»����˶������������බ�������ԭ����������ƫ������2���������ܵ������Ħ������ƥ�䡣
2.2��Һѹ������
2.2.1������������ģ�͡�
���ڻ����������˶�ʱ����ƽ�⣬�������˺�Ͳ֮������˶�ʱ�����ӻ����˾�ֹ����Ͳ�ڻ������ϻ�������ˣ���Ͳ�ͻ���֮���Լ����ϵ����Ϊ�̶���֧���������˺͵�����Լ����ϵ����Ϊ���֧�����ɵõ�������������ģ����ͼ4��ʾ��ͼ4�У�FA��FB��FC��FD�ֱ�Ϊ���»������Ͳ��������֮��ľ�������sΪ�����˶����������������ľ��룬�ڻ���������ʱ��s������lΪҺѹ�������������ӿ�ľ��룻MΪ����ƫ�ز�������ء�
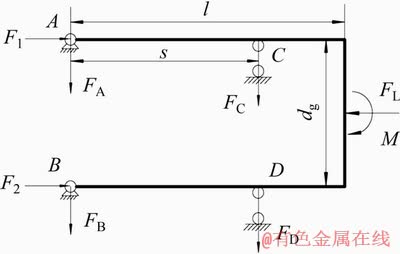
ͼ4��������������ģ��
Fig. 4��Simplified mechanics model of piston rods
�ýṹΪ���γ������ṹ��������������������[16]�����ڸ�ϵͳ�ṹ�Գƣ���ѡȡ������ϵʱ�ɽ��˼��ӶԳ��ᴦ�ضϣ����жԳƴ�����������FL�����M�ֽ�Ϊһ�Գ����ͷ��Գ������ۺ����ã�ԭ�ṹ��ЧΪ��ͼ5��ʾ�Ļ�����ϵ������

ʽ�У�dgΪ��Чģ�������ӿ�ij��ȣ�aΪ���ص�Ч�������ϻ����˵����۳��ȡ�
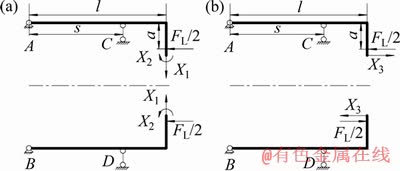
ͼ5����Ч����ģ�ͻ�����ϵ
Fig. 5��Basic system of equivalent force model
�������ṹ�б���Э�����̣�
ʽ�У�Xi(i=1,2,3)Ϊԭģ�͵�Ч������Ķ���Լ������ij(i,j=1,2,3)Ϊ��XjΪ��λ�غ�ʱ��Xi�����õ���Xi�����ϵ�λ�ƣ���ipΪ���غ�p��Xi�����õ㣬����Xi�����ϵ�λ�ƣ���ij�͡�ip��ͨ��ͼ�˷�[16]�ó������У������˺����ӿ�Ĺ��Ծطֱ����£�

ʽ�У�dΪ������ֱ����hΪ���ӿ���ν���߶ȣ�bΪ���ӿ��ȡ�
A��B�㴦������ƽ��״̬���Գƽṹ�����²�����ˮƽ����ֱ�����ϴ�����ƽ��״̬������

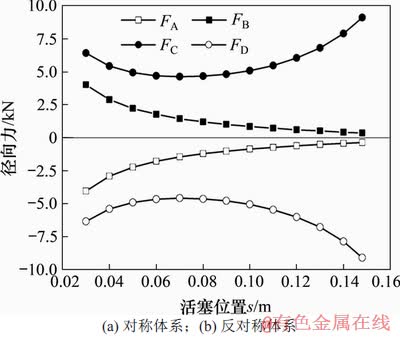
ͼ6���������ڲ�ͬλ���µľ�����
Fig. 6��Radial force of the piston at different positions
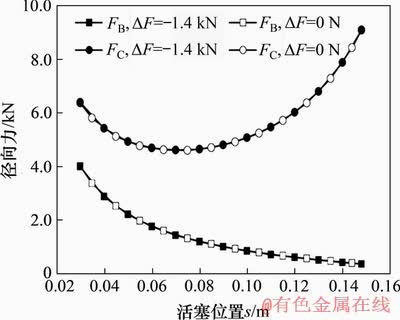
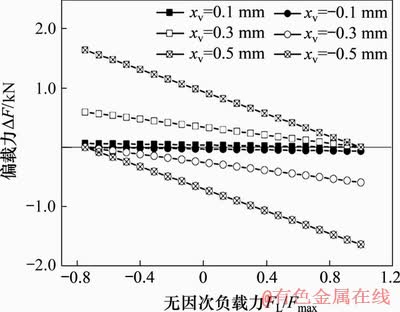
ͼ7��ƫ�����Ծ�������Ӱ��
Fig. 7��Effect of offset load force on radial force
����ʽ(32)~(35)��ͼ�˷���������������λ�õľ���������ͼ3��֪�����⸺��Ϊ90 kN�����ڿ���Ϊ-0.5 mmʱ����ʱ��ƫ�������Ϊ-1.4 kN�����ͼ1����1�ɵø������������λ��s�Ĺ�ϵ��ͼ6��ʾ����ͼ6���Է��֣�
1) ������FA��FB������ȣ�FC��FD������ȣ������෴���������Ͳ֮����������FA��FBԼΪ�������˳��ܵ���������(45 kN)��8%���������뵼����֮����������FC��FD���ʱ����������������20%��
2) �����������ع����У��������Ͳ֮��ľ�������С���������뵼����֮��ľ������ȼ�С�����������˴���Һѹ���в�λ�ø���ʱ�������������С���ɴ˿ɼ������ӵ����ĺ�ȿ��Լ��ٻ�����Ͳ֮��ľ����������ڲ���˫��Һѹ�ף��乤���г̲��˹�����
2.2.2��������Ӱ�����ط�����
����FA��FB������ȣ�FC��FD������ȣ��������FB��FCΪ��˵��ƫ������F�����ӿ�ĺ���Լ����ӿ���϶Ծ�������Ӱ�졣
1) ��F�Ծ�������Ӱ�졣��
�ֱ�����ڡ�F=0 N�͡�F=-1.4 kNʱ��ͬλ��״̬�µľ�������ƫ�����Ծ�������Ӱ���ͼ7����ͼ7�ɼ����������˸��ز�ֵ��-1.4 kN�仯��0 Nʱ������������û�з����κα仯����ˣ���Сƫ�����Խ��;�����û���������á�
2) ���ӿ��ȶԾ�������Ӱ�졣��
ͼ8��ʾΪ���ӿ����Ϊ�ѺϽ𣬺�ȷֱ�Ϊ20��30��40 mmʱ�������˴��ڲ�ͬλ���µľ���������ͼ8�ɼ������ӿ��ȶԾ�������Ӱ�������������ӿ������ӵ�40 mmʱ����Ͳ�ͻ���֮��ľ������½�����������2%���£��������˺͵�����֮��ľ������½�����������7%���¡�
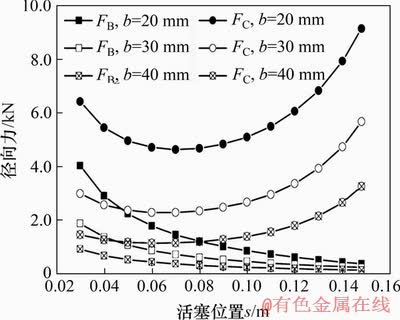
ͼ8�����ӿ��ȶԾ�������Ӱ��
Fig. 8��Effect of connecting block thickness on radial force
3) ���ӿ���϶Ծ�������Ӱ�졣
ͼ9��ʾΪ�����ӿ���Ϊ20 mm������Ϊ�ѺϽ��Լ������ʱ����ͬλ���µľ���������ͼ9�ɼ���ͨ��ʹ���������ģ����IJ��Ͽ�����Ч���ͻ�����Ͳ�Լ������˺͵�����֮��ľ�������
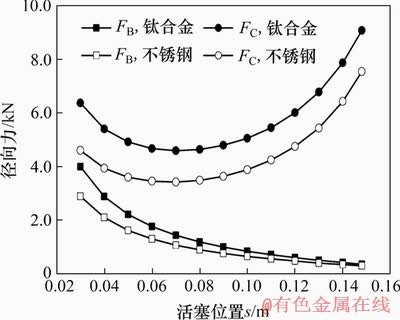
ͼ9�����ӿ���϶Ծ�������Ӱ��
Fig. 9��Effect of connecting block material on radial force
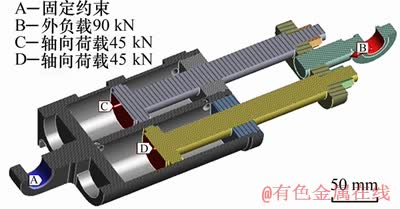
ͼ10��Һѹ��������������
Fig. 10��Hydraulic cylinder radial force simulation settings
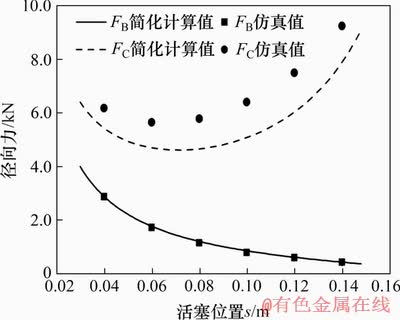
ͼ11����������ģ�ͺͷ������Ա�
Fig. 11��Comparison between simplified model result and simulation result of radial force
2.2.3������������Ԫ���㡡
Һѹ���ܵ��ľ����������ͨ������Ԫ������м��㡣Һѹ����������������ͼ10��ʾ����Ͳ�������Ӵ�����Ϊ�̶�Լ����ͨ��������֪����������Ҫ�ɽṹ���£������»����˵�����ƫ������ϵ������ˣ������ӿ�����������ʩ��90 kN���⸺�أ�2����������ʩ��45 kN�������غɡ�Ϊ�˼ӿ�������������������Ͳ���������������֮������ΪĦ������Ϊ0.001����Ħ��Լ���⣬�������Լ����Ϊ�̶�Լ����
��������ģ�ͺͷ������Ա���ͼ11��ʾ����ͼ11���Է��֣��������õ��ĵ�����������˴��ľ�����FC�ȼ�ģ�ͼ����������������Ͳ֮��ľ�����FB�ķ��������ģ�ͼ������dz��ӽ������ߵ���������ڼ�ģ�ͺ��������ϸ�����أ�ģ������������ѡȡҲ������ȫ��ӳʵ�ʣ����������ڲ�ͬλ���µļ�ģ�ͼ������ͷ�������ʾ����ͬ�ı仯���ƣ�˵���ü�ģ�Ϳ���Ϊ��������ṩ�ο���
3 �������˶����۽����ʵ�����Աȷ���
Һѹ��ʵ��ԭ��ͼ��ͼ12����ϵͳ����ѹ��Ϊ5 MPaʱ��ʹ��RP3ȼ����Ϊ�������ʣ��ֱ���в�ͬ���źŵ�����Һѹ�����С������ӿ��µ�ʵ�飬ʵ�������ŷ���Ϊij���������ŷ�������������Һѹ�ף���Ͳ����Ϊ�ѺϽ𣬻����˲���Ϊ����֣���Ҫ�ṹ��������1��������װ���ӿ飬���Ʒ��źŵ���С��6 mAʱ���»�������������ף��ϻ���������������źŷ���ʱ���»����������ص��ף��ϻ��������˶��������źŵ����ֱ�Ϊ7��15��40 mAʱ�����»�����ͬʱ�˶�������װ�����ӿ���źŵ�����Сʱ�����Թ۲���������������ʱ�����Ķ��������źŵ����ϴ�ʱ����������Ƚ����ԡ�ȡ�����ӿ鲢���µ�����װ�����˺����ڹ���ѹ��5 MPa�½���ʵ�飬���ֵ����źŵ����ֱ�Ϊ5��7��15��40 mAʱ�����»����˾�ͬʱ������������װ֮���ʵ���ֳ���ͼ13��ʾ��
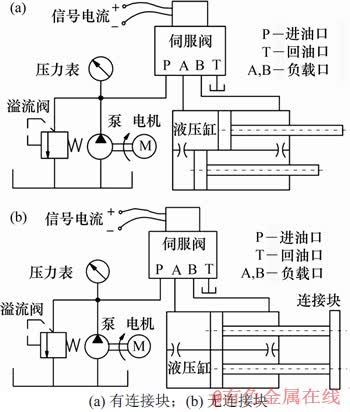
ͼ12��Һѹ��ʵ��ԭ��ͼ
Fig. 12��Experimental schematic diagram of hydraulic cylinder
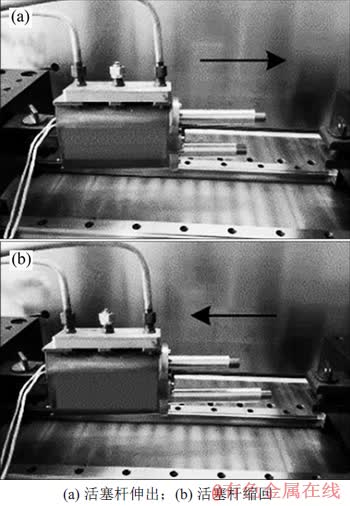
ͼ13�������˶���ͬ��ʵ��
Fig. 13��Synchronization experiment of piston rods
����ʵ������������ȡ�»��������°�װ֮ǰ���ϻ������ܵ������Ħ�������������»����˵����Ħ�������ϴ���ˣ������źŵ�����Сʱ���»��������˶��������źŵ�������һ��ֵʱ������ʹ���»�����ͬʱ�˶�������װ������»������ܵ������Ħ�����IJ����С�����ϻ����˵����Ħ������Ȼ���»������ܵ������Ħ�����Դ���ˣ���5 mA��С�źŵ�������Ȼ�����»�����ͬʱ�˶�����ʵ�������뱾�ĵ�2.1.2����ƫ�����Ի������˶�˳���Ӱ������۷����������һ�¡�
4 ����
1) �Ƶ���Һѹ�����»����˳��ܵ�ƫ��������ʽ����������һ��ʱ��ƫ��������Ϊ���ڿ��ȵĶ��κ����������ڿ���һ��ʱ��ƫ�����븺���������Թ�ϵ�����������ʱ����Խ��ƫ����Խ������������ʱ������Խ��ƫ����ԽС����������������Ч����ƫ������
2) �������˶����յ�������������ԭ�������»����˵�ƫ�������ܵ������Ħ������ƥ�䡣���ϻ����˵����Ħ����Сʱ�������ϻ������ȶ����������»����˵����Ħ����С�ҷ��ڿ��ȵ����ٽ翪��ʱ�����»������ȶ�������װ���ӿ�����»������˶���һ�»ᵼ�»��������˶��յ������������
3) ���Ż����˵�������������Ͳ֮��ľ������������������뵼����֮��ľ������ȼ�С������ͨ���������ӿ�ĺ���Լ����õ���ģ������IJ��Ͽ���ʹ�������õ���Ч��С����������Һѹ��ƫ������ϵ����
�ο����ף�
[1] ����, ½��, ��˫·, ��. һ��˫Ͳ˫�˻�еͬ��Һѹ��: �й�, 109236796A[P]. 2019-01-18.
XU Yang, LU Chang, LI Shuanglu, et al. Double-cylinder double-rod mechanical synchronous hydraulic cylinder: China, 109236796A[P]. 2019-01-18.
[2] CHEN Chengyi, LIU Liqiang, CHENG Chicheng, et al. Fuzzy controller design for synchronous motion in a dual-cylinder electro-hydraulic system[J]. Control Engineering Practice, 2008, 16(6): 658-673.
[3] SUN Hong, CHIU G T C. Motion synchronization for dual-cylinder electrohydraulic lift systems[J]. ASME Transactions on Mechatronics, 2002, 7(2): 171-181.
[4] ���, ���ı�, ������, ��. ˫��Һλ���ŷ�ͬ������ϵͳ�����ܿ���[J]. ������ͨ��ѧѧ��, 2011, 45(11): 85-90.
DENG Biao, SU Wenbin, GUO Qinyang, et al. Intelligent control for electro-hydraulic position servo synchronic control system with double cylinders[J]. Journal of Xi'an Jiaotong University, 2011, 45(11): 85-90.
[5] �߾�, ��ռ��, ������, ��. ˫��ͬ��������Һϵͳ��ģ�Ϳ���[J]. ��е����ѧ��, 2007, 43(2): 81-86.
NI Jing, XIANG Zhanqin, PAN Xiaohong, et al. Synchronization modeling and control for two cylinder electro-hydraulic elevating systems[J]. Chinese Journal of Mechanical Engineering, 2007, 43(2): 81-86.
[6] BARAGETTI S, TERRANOVA A. Limit load evaluation of hydraulic actuators[J]. International Journal of Materials and Product Technology, 1999, 14(1): 50-73.
[7] GAMEZ-MONTERO P J, SALAZAR E, CASTILLA R, et al. Misalignment effects on the load capacity of a hydraulic cylinder[J]. International Journal of Mechanical Sciences, 2009, 51(2): 105-113.
[8] LATHAM R P. Hydraulic cylinder with lateral support: U.S. 5172625[P]. 1992-12-22.
[9] տ�Ӳ�, �˽���, �¿���. ��Ħ����Ƶ����϶�ܷ�Һѹ���о�[J]. ��е����ѧ��, 2015, 51(24): 161-167.
ZHAN Congchang, DENG Jianghong, CHEN Kuisheng. Research on low-friction and high-response hydraulic cylinder with variable clearance[J]. Journal of Mechanical Engineering, 2015, 51(24): 161-167.
[10] ½��, ����, ӝҫ��, ��. ��ѹ����ѹ֧�ſ�ƫ�ض�̬���Է������Ż�[J]. ͬ�ô�ѧѧ��(��Ȼ��ѧ��), 2019, 47(3): 401-407.
LU Liang, TAO Tao, YIN Yaobao, et al. Load-deflection resistance dynamic characteristic analysis and structure improve of compressible hydrostatic bearing[J]. Journal of Tongji University(Natural Science), 2019, 47(3): 401-407.
[11] ������, ������, ֣��ΰ, ��. �����˷ǽӴ��ܷ����ŷ�Һѹ���е�Ӧ�ü����ϵͳ�����ȶ��Ե�Ӱ��[J]. ������Һѹ, 2015, 43(13): 71-74.
WU Xiaoming, ZHAO Ziliang, ZHENG Shuwei, et al. Use of non-contact seal in servo cylinder and its influence on low speed stability of hydraulic system[J]. Machine Tool & Hydraulics, 2015, 43(13): 71-74.
[12] Ҧ����, ������, ������, ��. �����������̵��غ��о�[J]. ����ѧ��, 2008, 29(6): 718-722.
YAO Xiaoguang, GUO Xiaosong, FENG Yongbao, et al. Load analysis on missile erection[J]. Acta Armamentarii, 2008, 29(6): 718-722.
[13] �뽭��, ���պ�, ������, ��. �༶Һѹ��ģ�����仺���о�[J]. ����ѧ��, 2016, 37(12): 2268-2276.
FENG Jiangtao, GAO Qinhe, GUAN Wenliang, et al. Modeling of telescopic hydraulic cylinder and research on inter-stage buffer[J]. Acta Armamentarii, 2016, 37(12): 2268-2276.
[14] �쿵��, ����, �ͱ���, ��. �ڿ���ʽҺѹ������������Ӧ���о�[J]. ��е����ѧ��, 2018, 54(10): 225-232.
ZHU Kangwu, FANG Cheng, JI Baoliang, et al. Theoretical study and application on the hydraulic actuator with holes in wall[J]. Journal of Mechanical Engineering, 2018, 54(10): 225-232.
[15] GAMEZ-MONTERO P J, SALAZAR E, CASTILLA R, et al. Friction effects on the load capacity of a column and a hydraulic cylinder[J]. International Journal of Mechanical Sciences, 2009, 51(2): 145-151.
[16] ����. �ṹ��ѧ[M]. �人: ���пƼ���ѧ������, 2014: 148-184.
LI Li, Structural mechanics[M]. Wuhan: Huazhong University of Science and Technology Press, 2014:. 148-184.
���༭ �������
�ո����ڣ� 2019 -10 -28; �����ڣ� 2020 -01 -08
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51775383) (Project(51775383) supported by the National Natural Science Foundation of China)
ͨ�����ߣ���˫·����ʿ�о��������¼��˻����µ�Һ�ŷ�Ԫ�����������о���E-mail��1710765@tongji.edu.cn
ժҪ:���ʸ����ܷ��������õIJ���˫��Һѹ�״��ڲ�����ĥ����˶����������⣬����Һѹ����ѧģ�ͺ͵�Ч����ѧģ�ͣ��о���ͬ���ء���ͬ���ڿ�����ƫ�����Լ��������Ͳ���������뵼����֮��ľ������仯������о�������������⸺��һ��ʱ��ƫ�����뷧�ڿ��Ƚ��Ƴʶ��κ�����ϵ�������ڿ���һ��ʱ��ƫ�������⸺�س����Թ�ϵ���ڿ��������£�ƫ�ػ��2�������˵��˶�˳�����Ӱ�죻���⸺�������£������ṹ���α䵼�¾������IJ�����2�������˵�����ƫ�ضԾ�����Ӱ���С���������Ͳ֮��ľ���������������������������������뵼����֮��ľ������������������������ȼ�С��������Һѹ��֮��Ĵ��������Խ��2�������˵�����ƫ����ԽС�������������ӿ��Ȼ��߲��øߵ���ģ���IJ��Ͽ�����Ч�ؽ���Һѹ�ľ�����������ƫ������2���������˶�˳���Ӱ�죬ʵ���������۽�������
[1] ����, ½��, ��˫·, ��. һ��˫Ͳ˫�˻�еͬ��Һѹ��: �й�, 109236796A[P]. 2019-01-18.
[4] ���, ���ı�, ������, ��. ˫��Һλ���ŷ�ͬ������ϵͳ�����ܿ���[J]. ������ͨ��ѧѧ��, 2011, 45(11): 85-90.
[5] �߾�, ��ռ��, ������, ��. ˫��ͬ��������Һϵͳ��ģ�Ϳ���[J]. ��е����ѧ��, 2007, 43(2): 81-86.
[8] LATHAM R P. Hydraulic cylinder with lateral support: U.S. 5172625[P]. 1992-12-22.
[9] տ�Ӳ�, �˽���, �¿���. ��Ħ����Ƶ����϶�ܷ�Һѹ���о�[J]. ��е����ѧ��, 2015, 51(24): 161-167.
[12] Ҧ����, ������, ������, ��. �����������̵��غ��о�[J]. ����ѧ��, 2008, 29(6): 718-722.
[13] �뽭��, ���պ�, ������, ��. �༶Һѹ��ģ�����仺���о�[J]. ����ѧ��, 2016, 37(12): 2268-2276.
[14] �쿵��, ����, �ͱ���, ��. �ڿ���ʽҺѹ������������Ӧ���о�[J]. ��е����ѧ��, 2018, 54(10): 225-232.
