
��¯ȼ��ϵͳ³�������о�
���캣��³溣��ܺ���·��
(������Ϣ�Ƽ���ѧ �Զ���ѧԺ��������100192)
ժ Ҫ��
��糧��¯ȼ�չ����У�������ѹ������ϵͳ��H�����������³��������������о����ڹ�����Χ�仯ʱ���ñ��ض���ģ���кܴ�ı仯��Ϊ�˽��1�����H��³��������Ʋ��ܱ�֤ϵͳ���нϺ����ܣ�����ϵͳ���г����и�Ƶ�Ϳ�������������������Χ�����⣬���ͨ���IJ�ȷ����Ȩ����������Ȩ���������Խ���H��³�����Ʒ�����ƣ�������ȷ����Ȩ����������Ȩ������ѡ�������иĽ���H�����������³����������ƣ����H�����������³��PI����������������������ƵĿ���ϵͳ���нϺõ�³�����ܡ�
�ؼ��ʣ�
H�����������³��������Ȩ��������¯ȼ��ϵͳ��
��ͼ����ţ�TP273 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0213-06
Robust control of a boiler combustion system
HENG Qing-hai, LU Jing, ZHOU Hai, LU Yang
(School of Automation, Beijing Information Science and Technology University, Beijing 100192, China)
Abstract: The design of H�� robust performance of a boiler combustion system with the perturbations of the controlled members was presented. It can be used to solve H�� robustness problems, which can��t be done by the conventional H�� robust performance designs. In the initial stage of system operation, high frequency oscillation and large amplitude of output and control variable of the control system are exhibited by a conventional H�� robust performance design method. It is pointed out that the design of the robust performance can be formulated as an optimization H�� mixed sensitivity method, if the uncertainty weighting function and the performance weighting function are revised appropriately. The selections of the weighting functions are studied and the optimization H�� mixed sensitivity robust PI controller is solved. The simulation results show that the proposed method is valid. The realization of the controllers doesn��t involve extra cost to the control equipment in existence.
Key words: H�� mixed sensitivity; robust control; weighting function; boiler combustion system
�Թ�¯ȼ�տ���ϵͳ������Ҫ���豸��Ϊ��ȷ����Ч��ȷ����ȫ���ȶ���������¯ȼ�յĿ��ƾ��Եø�����Ҫ[1-2]����¯ȼ��ϵͳ���ض��ɱ���Ĵ����ӳ��㶯��³������������һ����Χ�ڿ���Ч����㶯ϵͳ��³���������������[3-15]�������H��³�����Ʒ�����Ȼ������һЩ³������ָ�꣬������ƵĹ�¯ȼ�տ���ϵͳ�����г����и�Ƶ�Ϳ�������������������Χ������[1]������������ʵ�֡�����PID���Ʒ�����Ȼ�ṹ���ȶ��Ժá������ɿ����������㣬�����������ƶ���Ч�ؽ��ϵͳ��³���������⡣��������谭�������ϵͳ��ȫ�ԺͿɿ��Ե���ߡ�����������ı����й�¯ȼ�տ���ϵͳ³��������ƹ�����ۺͷ��������ѽ��������⡣�������߸�����¯ȼ��ϵͳH��³��PID��������Ʒ���������ⷽ���������ͨ���IJ�ȷ����Ȩ����������Ȩ���������Խ���H��������ơ������˲�ȷ����Ȩ����������Ȩ������ѡ���������˸Ľ���H�����������³����������ƣ������H�����������³��PI���������볣��PID��������ȣ����нϺõĿ���Ʒ�ʺ�³���ԣ��Ҿ��нṹ����ȷ��ʵ�õ��� �㡣�Թ�¯ȼ��ϵͳ��ƽ�����еķ���������������ߵ���Ʒ�������Ч�ġ�����˹�¯ȼ��ϵͳ�Ա��ض����㶯ʱ��³���ԣ����ڿ��ǵ��˴���ϵͳ���ص㣬�������ˣ����Ҳ���Ҫ�������п����豸��Ͷ�ʡ�
1 ��¯ȼ�տ�������
��¯ȼ�ձջ�ϵͳ��ʽ[1]��ͼ1��ʾ��ͼ��K1(s)��K2(s)�ֱ�Ϊ�ڿ�����(ȼ���ʵ�����)����������(������ѹ��������)��G1(s)��G2(s)�ֱ�Ϊ��ǰ��(ȼ����)��������(������ѹ��)���ض���Ĵ��ݺ�����rΪ�ο����룬u1��u2�ֱ�Ϊȼ���ʵ����������������ѹ�������������
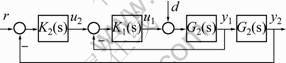
ͼ1 ��¯ȼ�տ���ϵͳ
Fig.1 Boiler combustion control system
![]() (1)
(1)
![]() (2)
(2)
��ʽ(1)��(2)���Կ�������ǰ�����������������Ӧ���ӳ٣����Ҷ������ӳ��ǵ�ǰ���ӳٵ�6�����ϡ�
���ĵ����������Ѱ��³��P������K1(s)�� H�����������³��PI������K2(s)��ʹ��ϵͳ�� �ӳ��㶯ʱ�Ծ��нϺõ����ܣ���Ҫ��֤³���� �ܡ�
Ϊ������ƽ���Ƚϣ����ĸ�������[1]����H����������ȵ���ƽ����
K1=69.65 (3)
![]() (4)
(4)
2 ��¯ȼ�տ��������ڿ���������������
��Ϊ��������ϵͳ�ڡ�����·�������ϴ������ڡ�����·������������������·�ֱ���������
�ڻ�·�����ٽ����������ƣ��ñ���(P)������Ϊ��
K1=42.499 8 (5)
3 ��¯ȼ�տ��������H��³��PI���������
3.1 ������������������
��¯ȼ��ϵͳ����·��ƿ�ͼ��ͼ2��ʾ������H����������ȷ�������³���������[13]��
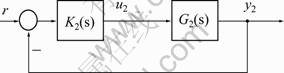
ͼ2 ����·H�����������
Fig.2 Main loop for H�� mixed sensitivity design
��������[13]�����������ȶ��Ŀ�����ʹ
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
ʵ���ϼ���
![]() (9)
(9)
����[13]��ʽ(9)������PID����������Ѱ�š�
���У�WP��WI�ֱ�Ϊ���ܺͲ�ȷ����Ȩ������
����ʽ(2)�����������(��ƶ���)��ȡΪ��
![]() (10)
(10)
����H���������ۣ���ȡ���Բ�ȷ����Ȩ����
![]() (11)
(11)
����Ȩ������ѡȡΪ��
![]() (12)
(12)
����������·PI����������ʽΪ��
![]() (13)
(13)
�Թ�¯ȼ������·����H�����������ָ����ơ���ʽ(13)����ʽ(9)�������õ����ε��ŷ������ʽ(9)��������·������H��³��PI��������
![]() (14)
(14)
3.2 �����о�
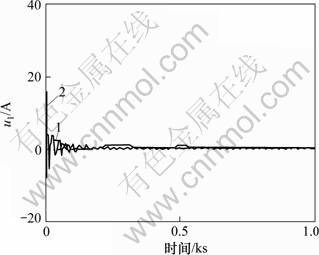
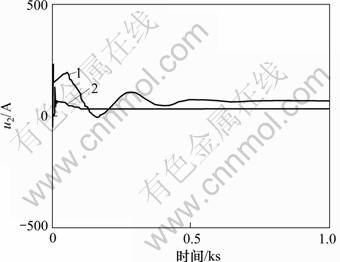
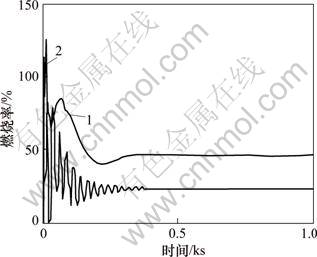
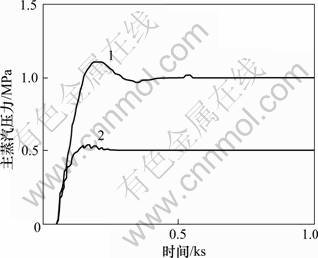
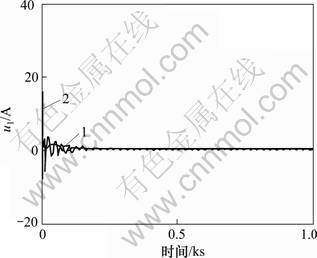
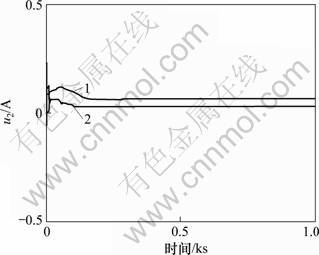
Ϊ�˼��鱾����Ʒ�������Ч�ԣ��Թ�¯ȼ�տ���ϵͳ��ϵͳ��Ӧ�����˷��档r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱϵͳ���y1��Ӧ����ͼ3��r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱ���y2��Ӧ����ͼ4��r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱ�������u1��Ӧ����ͼ5��r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱ�������u2��Ӧ����ͼ6��ͼ3~6�У�����1��Ӧ�ڱ�����ƵĿ�����ʽ(5)��ʽ(14)������2��Ӧ������[1]��ƵĿ�����ʽ(3)��ʽ(4)��
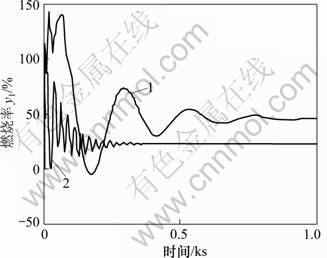
ͼ3 ϵͳ���y1(ȼ����)
Fig.3 System responses y1 (combustion rate)
ͼ3��ʾΪϵͳ���y1(ȼ����)����ͼ3���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ��̬ʱȼ���ʽϵͣ����ڸտ�ʼ�仯ʱ�������Ե���ȼ�������ֵ��������100%������ʵ�к��Ѳ��á����ÿ�����ʽ(5)��ʽ(14)��Ƶ�ϵͳ����Ȼ�ܽ���տ�ʼ�仯ʱ�������������⣻���տ�ʼ�仯ʱ����ֵ�ϴ�����ʵ�н��Ѳ��á�
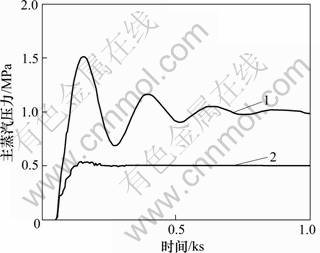
ͼ4 ϵͳ���y2 (������ѹ��)
Fig.4 System responses y2 (main steam pressure)
ͼ5 ȼ���ʵ��������u1
Fig.5 Control laws u1
ͼ6 ������ѹ�����������u2
Fig.6 Control laws u2
ͼ4��ʾΪϵͳ���y2����ͼ4���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ���������ֵ̬Ϊ0.5������1�����ÿ�����ʽ(5)��(14)��Ƶ�ϵͳ����Ȼ�ܽ���������ֵ̬Ϊ 1�����⣻���������ϴ�����ʵ�н��Ѳ��á�
ͼ5��ʾΪȼ���ʵ��������u1����ͼ5���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ��ȼ���ʵ��������u1�ķ�ֵ�ﵽ30 A���ϣ����ڸտ�ʼ�仯ʱ�������Ե�������ʵ�к��Ѳ��á����ÿ�����ʽ(5)��ʽ(14)��Ƶ�ϵͳ���ܽϺá�
ͼ6��ʾΪ������ѹ�����������u2����ͼ6���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ��������ѹ�����������u2�ķ�ֵ�ﵽ0.4 A���ϣ����ڸտ�ʼ�仯ʱ��������������ʵ�к��Ѳ��á����ÿ�����ʽ(5)��(14)��Ƶ�ϵͳ�����ܽϺá�
��ͼ3~6���Կ���������[1]��ɵĹ�¯ȼ�տ���ϵͳ�������ܽϲ��ʵ�в���ʹ�á����ÿ�����ʽ(5)��(14)��Ƶ�ϵͳ����Ȼ���ܽ�����[1]�����ܺã���Ӧ����ʵ�ʹ��̣�Ч�����á���ˣ���Ҫ�Կ�����ʽ(5)��(14)��H��³��PI��������Ʒ������иĽ���
4 ��¯ȼ�տ�������ĸĽ�H��³��PI���������
4.1 ������������������
����H���������ۺ�³������ָ�꣬���ij��Բ�ȷ����Ȩ����Ϊ��
![]() (15)
(15)
������Ȩ������ѡȡΪ��
![]() (16)
(16)
����������·PI����������ʽΪ��
![]() (17)
(17)
�Թ�¯ȼ������·���øĽ�H�����������ָ����ơ���ʽ(17)����ʽ(7)�������õ����ε��ŷ������ʽ(7)��������·������H��³��PI������
![]() (18)
(18)
4.2 �����о�
Ϊ�˼��鱾�ĸĽ�H�������������Ʒ�������Ч�ԣ��Թ�¯ȼ�տ���ϵͳ��ϵͳ��Ӧ�����˷��档r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱϵͳ���y1��Ӧ����ͼ7��r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱ���y2��Ӧ����ͼ8��r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱ�������u1��Ӧ����ͼ9��r����λ��Ծ�仯��d��0.1��λ��Ծ�仯ʱ�������u2��Ӧ����ͼ10��
���У�����1��Ӧ�ڱ��ĸĽ�H�������������ƵĿ�����ʽ(5)��(18)������2��Ӧ������[1]��ƵĿ�����ʽ(3)��(4)��
ͼ7��ʾΪϵͳ���y1(ȼ����)����ͼ7���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ��̬ʱȼ���ʽϵͣ����ڸտ�ʼ�仯ʱ�������Ե���ȼ�������ֵ��������100%������ʵ�к��Ѳ��á��Ľ�H����������������ɵĹ�¯ȼ�տ���ϵͳ³�����ܽϺá�
ͼ7 ȼ����y1
Fig.7 System responses y1 (combustion rate)
ͼ8 ϵͳ���y2(������ѹ��)
Fig.8 System responses y2 (main steam pressure)
ͼ9 ȼ���ʵ��������u1
Fig.9 Control laws u1
ͼ10 ������ѹ�����������u2
Fig.10 Control laws u2
ͼ8��ʾΪϵͳ���y2����ͼ8���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ���������ֵ̬Ϊ0.5������1������ʵ�к��Ѳ��á��Ľ�H����������������ɵĹ�¯ȼ�տ���ϵͳ³�����ܽϺá�
ͼ9��ʾΪȼ���ʵ��������u1����ͼ9���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ��ȼ���ʵ��������u1�ķ�ֵ�ﵽ 30 A���ϣ����ڸտ�ʼ�仯ʱ�������Ե�������ʵ�к��Ѳ��á��Ľ�H����������������ɵĹ�¯ȼ�տ���ϵͳ³�����ܽϺá�
ͼ10��ʾΪ������ѹ�����������u2����ͼ10���Կ�������������ѹ��������Ծ�仯ʱ������[1]��ɵĹ�¯ȼ�տ���ϵͳ��������ѹ�����������u2�ķ�ֵ�ﵽ0.4 A���ϣ����ڸտ�ʼ�仯ʱ��������������ʵ�к��Ѳ��á��Ľ�H����������������ɵĹ�¯ȼ�տ���ϵͳ³�����ܽϺá�
��ͼ7~10���Կ�������������ĸĽ�H�������������ƵĹ�¯ȼ��ϵͳ³��PI���Ʒ������������ϵͳ���нϺõ�³�����ܣ�������֤ʵ������Ч�ԡ������ڲ��õ���PI����������˲���Ҫ���������豸��Ͷ�ʡ�
5 ����
�Գ���H��³��������Ʋ��ܱ�֤ϵͳ���нϺ��������⣬����˹�¯ȼ��ϵͳ�Ľ�H��³��PI���Ƹ�������˸Ľ�H�����������PI³������������һ����Ʒ������Ծ��д��ӳٵĹ�¯ȼ��ϵͳ�����˸Ľ�H��³��PI��������ƣ�����ϵͳ���нϺõ�³���ԡ��������Ʒ����Ͳ��裬��һ�㴮������ϵͳ��H��³��PI��������ƾ��вο����塣
�ο����ף�
[1] Chen L J, Xue H. H�� robust control of combustion based on the radiant energy signal[J]. Control and Instruments in Chemical Industry, 2010, 37 (10): 14-17.
[2] Keshav S. Feedback combustion control using chemi-ionization probe in supersonic flow of combustion products[J]. Journal of Propulsion and Power, 2010, 26(1): 67-73.
[3] Ian P, Turner Matthew C, Herrmann G. Robust control applications[J]. Annual Reviews in Control, 2007, 31(1): 27-39.
[4] KIM J H, OH D C. Robust and non-fragile H�� control for descriptor systems with parameter uncertainties and time delay[J]. International Journal of Control, Automation and Systems, 2007, 5(1): 8-14.
[5] Kim J M, Park J B, Choi Y H. Non-fragile guaranteed cost control of time-delayed uncertain systems[C]//Proceedings of ICCAS 2007-International Conference on Control, Automation and Systems. Piscataway: IEEE Press, 2007: 1651-1655.
[6] Kim J K, Lim D H, Kim W K. Stability condition of robust and non-fragile H�� hovering control with real-time tuning available fuzzy compensator [J]. International Journal of Control, Automation and Systems, 2007, 5(4): 364-371.
[7] Oya H, Hagino K. Trajectory-based design of robust non-fragile controllers for a class of uncertain linear continuous-time systems[J]. International Journal of Control, 2007, 80(12): 1849-1862.
[8] Patre B M, Deore P J. Robust stability and performance for interval process plants[J]. ISA Transactions, 2007, 46(3): 343-349.
[9] Keviczky L, Banyasz C. Robust stability and performance of time-delay control systems[J]. ISA Transactions, 2007, 46(2): 233-237.
[10] Daniel M A, Niculescu S I. Computing non-fragile PI controllers for delay models of TCP/AQM networks[J]. International Journal of Control, 2009, 82(12): 2249-2259.
[11] HENG Qing-hai, LU Jing. The selections of nominal plant and weighting functions for robust control design[C]// Proceedings of the 8th World Congress on Intelligent Control and Automation. Piscataway: IEEE Press, 2010: 771-775.
[12] HENG Qing-hai, LU Jing. Non-fragile robust control for a paper basis weight control system[C]//Proceedings of the 8th World Congress on Intelligent Control and Automation. Piscataway: IEEE Press, 2010: 781-784.
[13] HENG Qing-hai, LU Jing. H�� non-fragile robust controller and its application to the paper basis weight control[C]//Proceedings of the 29th Chinese Control Conference. Piscataway: IEEE Press, 2010: 1939-1942.
[14] Zotov M G. An approach to robust control design[J]. Automation and Remote Control, 2010, 71(11): 2395-2404.
[15] HENG Qing-hai, LU Jing. Non-fragile robust multi-performance optimization design for control system of heating furnace[J]. Journal of Central South University: Science and Technology, 2009, 40(S1): 164-168.
(�༭ �°���)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
ͨ�����ߣ����캣(1964-)���У�����ˣ���ʿ�����ڣ�����³�����ƺ��ȹ����̿���ϵͳ�о����绰��13051730929��E-mail��qhheng@126.com
ժҪ���Ծ��д��ӳٵĻ�糧��¯ȼ�չ����У�������ѹ������ϵͳ��H�����������³��������������о����ڹ�����Χ�仯ʱ���ñ��ض���ģ���кܴ�ı仯��Ϊ�˽��1�����H��³��������Ʋ��ܱ�֤ϵͳ���нϺ����ܣ�����ϵͳ���г����и�Ƶ�Ϳ�������������������Χ�����⣬���ͨ���IJ�ȷ����Ȩ����������Ȩ���������Խ���H��³�����Ʒ�����ƣ�������ȷ����Ȩ����������Ȩ������ѡ�������иĽ���H�����������³����������ƣ����H�����������³��PI����������������������ƵĿ���ϵͳ���нϺõ�³�����ܡ�
