
DOI: 10.11817/j.issn.1672-7207.2016.08.020
��������ϵ��̬�仯�����˻��Ž������㷨
֣��Ӥ1��������2��������2
(1. �Ͼ����պ����ѧ ����ѧԺ������ �Ͼ���210016��
2. �Ͼ����պ����ѧ �Զ���ѧԺ������ �Ͼ���210016)
ժ Ҫ��
����̬�仯�����Ծ�ȷԤ�������⣬���һ�ֻ�����������ϵ��̬�仯���Զ��Ž������㷨���ڲ���Σ�������ϵ�����˻��ռ�λ�õı仯����̬�仯���ڸ��ٽΣ�������ϵ������Ž�����ı仯����̬�仯���������˻���������ϵ�µ��ٶȺ�λ�������켣������������ʵ�����˻��ľ�ȷ������������ij�ͽ������˻�Ϊ����ۺϷ���ƽ̨����Ʒ��п���ϵͳ���Ż��켣���������������뽢β���͵���������������ܵ���֤���������о�������������Զ��Ž�ϵͳ���������˻�ʵ�ֽϾ�ȷ��ײ���Ž����գ��Ž����ܷ���Ҫ��
�ؼ��ʣ�
���˻����Զ��Ž��������㷨�����п������켣������
��ͼ����ţ�V249.1 ���ױ�־�룺A ���±�ţ�1672-7207(2016)08-2685-09
Carrier UAV autonomous landing algorithm based on dynamic change of coordinate system
ZHENG Fengying1, GONG Huajun2, ZHEN Ziyang2
(1. School of Astronautics, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China;
2. School of Automation Engineering, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China)
Abstract: According to the dynamic changes of landing target difficult to accurately estimate, an autonomous landing algorithm was designed based on a new coordinate system with dynamic change. The new coordinate system changed dynamically with the trajectory of unmanned aerial vehicle (UAV) in the capturing phase, and changed with the ideal landing area in the tracking phase. The UAV��s speed and position errors were calculated in the new coordinate system, the errors were corrected through the trajectory controller, and UAV accurate guidance was realized. An active service carrier UAV was regarded as the research object, the simulation system was constructed, and the flight control system was designed. Finally, the trajectory control parameter was optimized. Air wake and navigation error were added to verify and evaluate the performance of landing. The results show that this system can effectively guide the UAV to safely landing, and the landing performances can meet the design target.
Key words: carrier UAV; autonomic landing; landing algorithm; flight control; trajectory guiding
���ڽ������˻���δ����ս�еĹ���Ӧ��ǰ����������ǿ���ѽ�����Ϊ����δ�������ͽ�ͧ����Ҫװ��֮һ��Ŀǰ��������������˻�����ɵ�������������нξ�ͨ��ң���豸����֤�ȶ��ԺͿɿ��ԡ����ſƼ��IJ��Ϸ�չ������ǿ��Ҫ�������˻��ܹ���������/�Զ���ɡ����䣬��ˣ������˻��Զ��Ž�ϵͳ���о��Ե�������Ҫ����ؼ��������������˻�ʹ�侫ȷ�Ž�����[1-2]�����ڼ���������������������һ���湫���������о��ɹ����٣��Ҵ��Ϊ�����˼�ʻ�Ľ��ػ�Ϊģ�ͽ����Զ��Ž�����������о�[3-5]�������˻������������ԣ����͵�½�����˻�������½ʱ��ͨ�����Ŀ����½���趨���Ź켣��Ȼ����ƿ�������ȷ���ٸù켣�����磬HORN��[6]����������Ŀ�꺯���Ż���������˻����й켣������������ٶȣ�ʵ�ֵ�һ�������˻��켣�Ż���CHAMSEDDINE��[7]��Է��а����������Ƶ����⣬����һ�ּ���Ч�Ĺ켣�滮�����¹滮���ԣ����⸴�ӵ��Ż����⣻SIKHA��[8]Ϊ����ʵ�����˻��켣���٣�������ά�ռ伸���㷨��Ʒ��й켣����ͨ��PID������ʵ�ֹ켣��ȷ���٣�ZHANG��[9]���ij�̶������˻��켣����ϵͳ�����һ�ַ����Թ켣���ٷ���ʵ���˶�����ȷ����Ŀ��������١�Ȼ�����������˻���½�����˻��Ľ��价����ȫ��ͬ��ʵ���Ž����Ҳ��ȫ��ͬ�������ܺ����˶���Ӱ�죬��Ľ����ᵼ�������Ž��������������λ�ƣ���Ϊ��̬Ŀ�꣬������յ��Ž�����û���㹻��ʱ����ǰԤ�⣬��ô������������Ƴ���ѵķ���·�ߡ��ں�ĸ-���ػ��Ž�ϵͳ�У���Ҫ���ó���ľ��������㷨�����磬KHANTSIS[10]�����˻��켣���ƻ��ڣ����ñ�������������ͼ�Ż��������Լ�������ʵ���Ž�������STORVIK[11]��������ֱ�����뽢����λ����Ϣ������ֱ�����߷���ʵ�ֽ�������ֱ�����������㷵����֣��Ӥ��[12]�����ƫ�����������Ʋ���˶����Ž����ܵ�Ӱ�졣���ż�����������ִ��������ۡ������Կ������۵ķ�չ�����ſ��ơ�����Ӧ���ơ���̬����Ƶ��Ƚ����Ʒ���ҲӦ�õ����Ž��У�BANNETT[13]Ϊ��������Ч������ƾ��ȣ������ſ��Ʒ���Ӧ����F-8C���Զ��Ž��ݲ���켣����ϵͳ��ƣ�����˴�ͳ�����и߶ȿ��ƺ��Զ�������Ϊ����ͨ�����ֿ���ƵIJ���֮�����ṩ��һ�ֶ��������������Ʒ�����Ԭ���е�[14]�� ���Ʒ�����ƽ��طɻ��Զ��Ž�����ϵͳ����Ч������˵���ϵͳ�Ž��켣���پ��ȼ��������Ŷ������������뵤��[15-16]����Ž������еĽ��ػ��������˶�ģ�ͣ������һ�ֻ��ڷ����Զ�̬��Ļ�ģ���Ʒ�����������ػ���ȷ���Ʒ��й켣�����⡣Ȼ����Щ������������Ŀ������Ķ�̬�仯�������̬�仯Ԥ�ⲻȷ���������ܽ������½������⣬Ϊ������Ž����ܣ������ڿ������мӼװ岹�������Բ��������Ž�����̬�仯������Ž�ƫ����������ӿ���ϵͳ�ĸ����ԡ���һ��[17]������˻��Ž�����ϵͳ�������˻��Ž��Ĺ��̷�Ϊ�������2���Σ����һ�ֻ��ڹ켣������������˻��Ž��������������÷�����û�п����㷨�ľ����ԣ�Ҳû�п��Ǽװ��˶�������Ž���̬����仯�������㷨��Ӱ�졣���������ڴ˻����ϣ�������˻��Ž�Ŀ�����»��켣��̬�仯�����⣬�����������ϵ��̬�仯�����˻��Զ��Ž������㷨�������µ�������ϵ{F}����Σ�{F}�����˻�λ�ñ仯���仯���ڸ��ٽΣ�{F}�������Ž���ı仯���仯���������˻��ڸ�{F}����ϵ�µ��ٶȺ�λ�����ɽ��������ٽ��ٶ�ʸ��ƫ��㷨��ɢ�����⣬ʵ�ַɻ��»��켣�뽢�˶�ͬ�����봫ͳ�ķ�����ȣ�һ���棬������Ҫ��ǰ��̬�滮���й켣���ߣ�����ϵͳ�ṹ�ϼ��㷨��ʵ�֣�ϵͳ�ɿ�����ߣ���һ���棬�ɱ����ڿ������мӼװ岹����[18]�����Ϳ���ϵͳ�ĸ����ԡ�
���Ʒ�����ƽ��طɻ��Զ��Ž�����ϵͳ����Ч������˵���ϵͳ�Ž��켣���پ��ȼ��������Ŷ������������뵤��[15-16]����Ž������еĽ��ػ��������˶�ģ�ͣ������һ�ֻ��ڷ����Զ�̬��Ļ�ģ���Ʒ�����������ػ���ȷ���Ʒ��й켣�����⡣Ȼ����Щ������������Ŀ������Ķ�̬�仯�������̬�仯Ԥ�ⲻȷ���������ܽ������½������⣬Ϊ������Ž����ܣ������ڿ������мӼװ岹�������Բ��������Ž�����̬�仯������Ž�ƫ����������ӿ���ϵͳ�ĸ����ԡ���һ��[17]������˻��Ž�����ϵͳ�������˻��Ž��Ĺ��̷�Ϊ�������2���Σ����һ�ֻ��ڹ켣������������˻��Ž��������������÷�����û�п����㷨�ľ����ԣ�Ҳû�п��Ǽװ��˶�������Ž���̬����仯�������㷨��Ӱ�졣���������ڴ˻����ϣ�������˻��Ž�Ŀ�����»��켣��̬�仯�����⣬�����������ϵ��̬�仯�����˻��Զ��Ž������㷨�������µ�������ϵ{F}����Σ�{F}�����˻�λ�ñ仯���仯���ڸ��ٽΣ�{F}�������Ž���ı仯���仯���������˻��ڸ�{F}����ϵ�µ��ٶȺ�λ�����ɽ��������ٽ��ٶ�ʸ��ƫ��㷨��ɢ�����⣬ʵ�ַɻ��»��켣�뽢�˶�ͬ�����봫ͳ�ķ�����ȣ�һ���棬������Ҫ��ǰ��̬�滮���й켣���ߣ�����ϵͳ�ṹ�ϼ��㷨��ʵ�֣�ϵͳ�ɿ�����ߣ���һ���棬�ɱ����ڿ������мӼװ岹����[18]�����Ϳ���ϵͳ�ĸ����ԡ�
1 ���˻��Զ��Ž�����ϵͳ
�������������{L}����ԭ��ΪO���̶��ڵ���ijһ�㣬X����ˮƽ��ָ��������Y��ָ��������Z�ᴹֱ����X��Y����ָ�������ֶ���ȷ����
�о��мٶ����˻��Ž����շ�ʽΪײ�����գ�������ѡ�����˻���ʼλ�ü���ʼ�ٶȷ��������������˻���ָ���Ž���Ĺ��̷�Ϊ�������2���Ρ�
�ڲ���Σ�ָ�����ػ�����һ����״̬��ij�̶��㣬����Ϊ����㣬��ͼ1��p0�㡣�ٶ���ĸֱ�ߺ��У�vuavΪ���˻������ٶȣ�vlandΪ�Ž���ǰ���ٶȣ��ڲ������ར��Զ��ֻ���ǵ����������Ǻ�ĸ�˶�����β���Է��й켣��Ӱ�졣�ڸ��ٽΣ����Ʒɻ��ٶȺ�λ�÷���ʹ��������Ž��㡣�ڽӽ���ĸʱ�����뿼�����ں����˶�����������Ž���ı仯���Լ���β�����Ŷ������˻��Ž���Ӱ�졣

ͼ1 ���˻��Զ��Ž�����ϵͳʾ��ͼ
Fig. 1 Schematic diagram of UAV automatic carrier landing
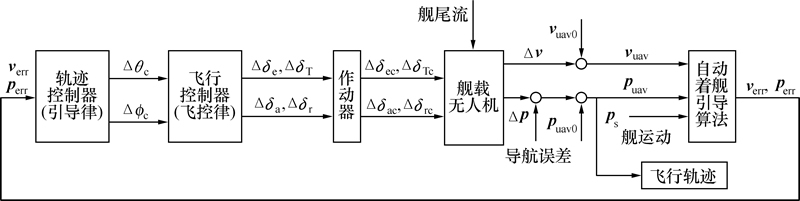
ͼ2 ���˻��Զ��Ž�����ϵͳ�ṹ����ͼ
Fig. 2 Structural allocation of UAV automatic carrier landing system
���˻��Զ��Ž�����ϵͳ�Ľṹ������ͼ2��ʾ�������������˻�����ѧ���˶�ѧ���ɿ�ϵͳ���Զ��Ž������㷨���켣������(�����ɼ���)�Ȼ��ڡ�����vuav0��puav0�ֱ�Ϊ��ʼʱ���ٶȺ�λ��ʸ������v�͡�pΪ���˻��ٶȺ�λ��ʸ���仯��������cΪ����ͨ���ĸ�����������ֵ�� Ϊ�����ͨ���Ĺ�ת��������ֵ��
Ϊ�����ͨ���Ĺ�ת��������ֵ�� ��
�� �ֱ�Ϊ�ɿ�ϵͳ����������������ƫת����
�ֱ�Ϊ�ɿ�ϵͳ����������������ƫת���� ��
�� �ֱ�Ϊ������ͷ����ƫת����
�ֱ�Ϊ������ͷ����ƫת���� ��
�� ��
�� ��
�� Ϊ��������������Ķ���ƫת����psΪ��ĸ�˶�����������Ž���λ�ƣ������Ű�����β������������Ӱ�����ء�
Ϊ��������������Ķ���ƫת����psΪ��ĸ�˶�����������Ž���λ�ƣ������Ű�����β������������Ӱ�����ء�
�������˻���ǰ���ٶ���Ϣvuav��λ����Ϣpuav�����Զ��Ž������㷨�������ٶ����verr��λ�����perr��������ź�����켣��������ͨ�������ɼ��㣬��������ָ�� ��
�� ���ɿ�ϵͳ���ո�ָ����ݷɻ�����������̬�ͺ�������������λ�ú��ٶ�ƫ��������˻�������켣�Ž���
���ɿ�ϵͳ���ո�ָ����ݷɻ�����������̬�ͺ�������������λ�ú��ٶ�ƫ��������˻�������켣�Ž���
2 �Զ��Ž������㷨���
2.1 �����p0λ�ü���
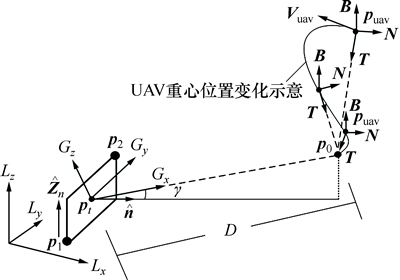
p0��ļ���λ����ͼ3��ʾ������p0ʱ������ȷ�������˶�Ӱ��ʱ���Ž�ʱ�̻�����������λ��pt�ͷ��� ������������Խ��ߵĵ�Ϊp1��p2���������е�λ��Ϊpt��ʸ��
������������Խ��ߵĵ�Ϊp1��p2���������е�λ��Ϊpt��ʸ�� ��ʾ�������Ĵ�ֱ����ͼ3���ٶ��Ž�������
��ʾ�������Ĵ�ֱ����ͼ3���ٶ��Ž������� ���䣬�������ķ���ʸ��ֻ��XYƽ�����ƶ���
���䣬�������ķ���ʸ��ֻ��XYƽ�����ƶ���
�������е��λ��pt�ɱ�ʾΪ
 (1)
(1)
���Խ��߷���Ϊ
 (2)
(2)
�ɹ���ʸ���� ���ɵû������ķ���ʸ��Ϊ
���ɵû������ķ���ʸ��Ϊ
 (3)
(3)
�ɴˣ���ȷ������������ά�ռ��λ�úͷ����ݻ�����λ�úͷ������p0�����������ķ���ʸ��ָ��X�ᣬ�ɵ�p0Ϊ
 (4)
(4)
ʽ�У���Ϊp0pt��ˮƽ��ļнǣ�DΪp0pt���ȡ�
����ָ��X�ᣬ�������һ�ַ�������p0�������µ�����ϵ{G}�����ϱ�G��ʾ��ԭ��Ϊpt��X��ָ��p0����ͼ3��ͼ3�У���������ϵ{L}���ϱ�L��ʾ��
ͼ3 �����ʾ��ͼ
Fig.3 Diagram of glide slope capturing
�� ����������ϵ{G}���������ϵ{L}֮���ŷ���ǣ�
����������ϵ{G}���������ϵ{L}֮���ŷ���ǣ� ��
�� ��
�� ��ʽ�У�
��ʽ�У� ��
�� �ֱ�Ϊ�ڵ�������ϵX���Y���ϵķ������ɴˣ���p0�ڵ�������ϵ�µ�λ��Ϊ
�ֱ�Ϊ�ڵ�������ϵX���Y���ϵķ������ɴˣ���p0�ڵ�������ϵ�µ�λ��Ϊ
 (5)
(5)
ʽ�У� ��ʾ{G}��{L}��ת������������ϵ{G}��{L}��ŷ���Ǽ���õ�����
��ʾ{G}��{L}��ת������������ϵ{G}��{L}��ŷ���Ǽ���õ����� ��
��
2.2 ������ٽε������㷨
�ڽ�������Σ������˻��ڷ��й��������ĵ�λ��ʸ��Ϊpuav��p0�����˻�����λ�õľ���Ϊ�� �������µ�������ϵ{F}��ԭ��Ϊ���˻�����λ��puav���Ե�λʸ��T��N��B��ʾ��������ϵ{F}�������˻���λ�ñ仯����̬�仯����ͼ3��ʾ��
�������µ�������ϵ{F}��ԭ��Ϊ���˻�����λ��puav���Ե�λʸ��T��N��B��ʾ��������ϵ{F}�������˻���λ�ñ仯����̬�仯����ͼ3��ʾ��
T��ʾUAV������ָ��p0�㣬�����ʽΪ
 (6)
(6)
N����Ϊ
 (7)
(7)
ʽ�У�xT��yTΪT�ڵ�������ϵX���Y���ϵķ����������ַ����
 (8)
(8)
����ʱ�������˻���ָ���ٶ�vc���У����������������˻���ʹ���ٶȷ����T����ˣ��ɽ����˻�����p0�㣬�������˻���{F}�����µ��ٶ�����λ�����Բ�����ȷ�Ŀ����źš�
���˻���{L}����ϵ�µ��ٶ����Ϊ
 (9)
(9)
ʽ�У�vcΪָ���ٶȣ�TvcΪT���ϳ�����vcһ�µ�����
�ɴˣ��ɵ�{F}����ϵ�µ��ٶ����veΪ
 (10)
(10)
�����˻��ٶȷ����T���Ұ�ָ���ٶ�vc����ʱ���ٶ����Ϊ0��
�ڸ��ٽΣ�{F}������ϵ�е�ʸ��T����Ϊp0��ָ��������е㣬���Ž������α��뿼�Ǻ�ĸ�˶�����������е���������λ��ps���ٶ��Ž�ʱ�ɻ��ٶ�Ϊva=25 m/s�����Ž�ǰԼ12.5 s����ps����ˣ�T�ı���ʽΪ��
 (11)
(11)
ʽ�У�XΪ�ɻ��������Ž���ľ��롣������Ž��Σ�T���������Ž����λ�ñ仯���仯����
 (12)
(12)
���
 (13)
(13)
N��B�Ļ�ȡ��������ǰ������һ�¡��ڸ��ٽΣ�ָ�����˻���p0������������Ž���λ��pm��
�� ���ɴˣ��ɽ������Ĺ켣��������
���ɴˣ��ɽ������Ĺ켣��������
 (14)
(14)
ʽ�У�p0Ϊ�����λ�ã�0��S��L��
p0�ɱ�ʾΪ
 (15)
(15)
����ʽ(14)��������켣 Ϊ
Ϊ
 (16)
(16)
����������Ĺ��Թ켣��UAVλ�����pe(S)Ϊ
 (17)
(17)
����ʹλ�����Ϊ��С�IJ���S����
 (18)
(18)
����������Ա�ʾΪ
 (19)
(19)
��ʽ(16)����ʽ(19)����
 (20)
(20)
�ɴ˿ɵ�
 (21)
(21)
��ʽ(21)����ʽ(16)��������켣Ϊ
 (22)
(22)
��ʽ(22)����ʽ(17)���ɵ�{L}����ϵ�µ�λ�����pe(S)Ϊ
 (23)
(23)
�ɴˣ��ɵ�{F}����ϵ�µ�λ�����Ϊ
 (24)
(24)
�������
 (25)
(25)
ͬ�����ɵ�{F}����ϵ�µ��ٶ����Ϊ
 (26)
(26)
2.3 �����㷨����
���о��з��֣�ʵ�������㷨�����й�������Ҫ���3�����⡣
2.3.1 �������̬ʱ�����ٶ�ʸ����T�෴�����
�ڲ���Σ��� �����������̿ɷֽ�Ϊ3��Լ��������
�����������̿ɷֽ�Ϊ3��Լ�������� ��
�� =0��
=0�� =0������ǰ2��Լ����������ͨ����������Ϣ��������Ͳ���ɿ�ϵͳ�����ٶ������{F}����ϵY���Z��ķ���Ϊ0�����ڵ�1��Լ�������������Ž�ʱ����ͨ���ٶȿ���ϵͳ�����ٶȺ㶨���䣬Ϊָ��ֵvc�������ܱ�֤�ٶ�ʸ��ָ��T��
=0������ǰ2��Լ����������ͨ����������Ϣ��������Ͳ���ɿ�ϵͳ�����ٶ������{F}����ϵY���Z��ķ���Ϊ0�����ڵ�1��Լ�������������Ž�ʱ����ͨ���ٶȿ���ϵͳ�����ٶȺ㶨���䣬Ϊָ��ֵvc�������ܱ�֤�ٶ�ʸ��ָ��T��
�ɴˣ��ڿ���ϵͳ(���������ɺͷɿ���)�����£�����ε������㷨�д���2�������1) ���˻���ָ���ٶ�vc���У����ٶȷ���vuav��T��vuav��T�ļн�Ϊ0�㣻�����������ķ��й켣����ͼ4(a)��ʾ��2) ������ȫ�෴��һ����������˻���ָ���ٶ�vc���У������˻��ٶȷ�����T�н�Ϊ180�㣬��ͼ4(b)��ʾ�����������㷨����Ҫ����ġ�Ϊ�����һ���⣬�轫vuav��T�ļн�Ҳ��Ϊ����ź��������ϵͳ����̬ʱ����н�Ϊ0�㡣

ͼ4 ����������㷨���ڵ�2�����
Fig. 4 Two cases of guidance algorithm in capturing
2.3.2 ���ٳ�ʼ���ٶ�ʸ������p0pt������
�������������ɱ�֤���˻�����p0�㣬�����ܱ�֤���˻�����p0��ʱ�������ٶ�ʸ����p0pt���ߣ���ͼ5������2��ʾ���������㷨���Ե����������˻�����p0ʱ�ٶ�ʸ����ͼ5��vuav(1)��ʾ�����й켣��ͼ5������1��ʾ��
Ϊʹ���˻��ڲ���p0��ʱ�����ٶ�ʸ����vuav(2)��ʾ����p0pt���ߣ�һֱ�������˻���p0pt���ߵľ��롣������С��ijһֵʱ����ͼ5�е�A�㣬��������ٽε������㷨��
2.3.3 �㷨��ɢ������
�����Զ��Ž������㷨ʱ����2������ᵼ���㷨��ɢ��1) ���ڲ��������˻��ij�ʼλ�����ʼ�ٶȷ������ڲ���ij�ʼ���п��ܴ��ڷɻ��ٶȷ���(XYƽ��)������켣֮��ĽǶȷdz���������2) �ӽ�p0�㣬������ٽ�ʱ���ٶȷ�����p0pt����֮��нǷdz�����������ͼ6��ʾ������TxyΪʸ��T��xyƽ���ͶӰ��
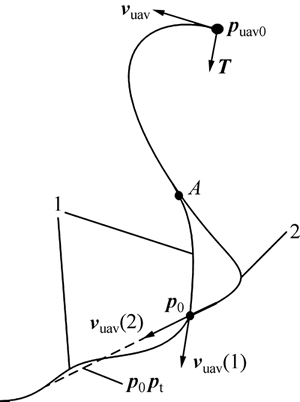
ͼ5 �ٶ�ʸ�����»��켣�ļн�
Fig. 5 Angle between velocity and glide path
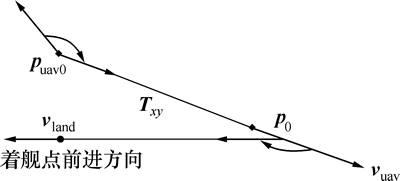
ͼ6 ��ʼ�ٶȷ���Զƫ���Ž���ǰ������
Fig. 6 Initial velocity far from landing point direction
����2������£��Զ��Ž��㷨�п��ܻᷢɢ���������÷dz�������������㷨���е������ͻ�Ӱ���Ž����ܡ���ʱ��������������������ij�ֵ��תָ�������λ�ú��ٶ���ȷ����תָ�������ֵ���ɴˣ���ʹ���ػ��ٶȷ�����ٶ�����켣�����Ա�֤�㷨��Ч��
3 �Զ��Ž�����ϵͳ���
3.1 �ɿ������
�Թ�������ij�ͽ������˻�Ϊ��[19]��������ȫ������Զ���ѧ���˶�ѧģ�ͣ�����Խ������˻�����ʱ����ֱ�߷���״̬Ϊ���������ƽ�����Ի����õ��������˻�����ͺ�������˶����̡��������˻��ݲ�����Ȼ���ԣ����IJ������¿����ɣ�
 (27)
(27)
ʽ�У� Ϊӭ�DZ仯����
Ϊӭ�DZ仯���� Ϊ��ʼӭ�ǣ�
Ϊ��ʼӭ�ǣ� Ϊ������ر仯����
Ϊ������ر仯���� Ϊ�����DZ仯����
Ϊ�����DZ仯���� Ϊ��ת�DZ仯����
Ϊ��ת�DZ仯���� Ϊ��ת���ٶȱ仯����
Ϊ��ת���ٶȱ仯���� Ϊƫ�����ٶȱ仯����
Ϊƫ�����ٶȱ仯���� Ϊ��DZ仯����
Ϊ��DZ仯���� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� Ϊ���������泣����
Ϊ���������泣���� ��
�� ��
�� Ϊ�˲������泣����sΪ���ݺ����������š�
Ϊ�˲������泣����sΪ���ݺ����������š�
����ͨ��Ϊ����ӭ�Ǻ㶨�Ķ�������ϵͳ��ͬʱ�����ٶȺ㶨�������������ͨ���ֱ���Ʒɻ��ĸ����ǡ����������ʺ�ת�ǡ���ת�����ʣ��Դﵽ���ƺ�����Ŀ�ģ������ͨ����Ҫ���תЭ�������á�
���⣬�������˻�������Ϊ�������ʺ�λ�����ƵĶ���ϵͳ������ȻƵ��Ϊ50 Hz������Ϊ1����ֹƵ��Ϊ5 Hz������ƣ��ɿ��ɸ�����Ϊ��

3.2 ���������
��Ƶ�����ɿ�ϵͳΪ������̬ϵͳ�������ɽ�����ɻ������ź� �� �������ͨ����������Ϊ
�� �������ͨ����������Ϊ
 (28)
(28)
ʽ�У� Ϊ���˻�λ�����perr�����������verrZΪ���˻��ٶ����verr�����������KcΪǰ���·���棻Kp��KaΪ�˲������泣������1Ϊ���ֳ�������2Ϊ�ٶȳ�������3Ϊ���ٶȳ�����
Ϊ���˻�λ�����perr�����������verrZΪ���˻��ٶ����verr�����������KcΪǰ���·���棻Kp��KaΪ�˲������泣������1Ϊ���ֳ�������2Ϊ�ٶȳ�������3Ϊ���ٶȳ�����
K(X)��R(X)Ϊ�ɻ�������Ŀ������X�йص�����������Ŀ���Ϊp0�㣬���ٽ�����Ŀ���Ϊ�����Ž��㡣


 (29)
(29)
ʽ�У�k1��k2��k3Ϊ���泣����LRX1��LRX2��LRX3��LRX4��LR1��LR2��LR3��LV1��LV2��LVX1��LVX2Ϊ������йص�����
����ƣ�����ͨ�������ɴ��ݺ���������Ϊ��Kc=0.132 8��Kp=6.25��Ka=0.42����1=0.1����2=2.0����3=2.8��LRX1=9 000��LRX2=1 800��LRX3=900��LRX4=720��LR1=0.25��LR2=1��LR3=1.25��LVX1=6 780��LVX2=2 280��LV1=0.2��LV2=1������ɿ�ϵͳΪ�����̬ϵͳ�������ɽṹ����������ơ�
4 ���˻��Զ��Ž�ϵͳ��������
����ʱ�����Զ��Ž������㷨�����뽢�˶�ѧ���ڷ��й켣�����м��뵼�����ڷɿ�ϵͳ�м��뽢β����Ӱ�죬��ͼ2�������������ձ�����ϵͳ��(NAVAIR) �ṩ���˶�ѧ���������[20]��MIL-F-8785C���ù淶�����ض��Ĵ����Ŷ���ѧģ��[21]��
�����ʼ�������£��ڵ�������ϵ{L}�£��趨pt����Ϊ(0��0��0)��p0�������Ϊ(983.5��983.5��85)����λΪm����ĸǰ���ٶ�vs=15 m/s���»��Ǧ�0=3.5�㣬�ɻ�ǰ���ٶ�Ϊָ���ٶ�va=25 m/s��
�ٶ�ѡȡ���˻���ʼλ��(-1 000��200��86)(��λΪm)����ʼ�ٶȷ���λʸ��(1��0��0)��������תָ����Ϊ��10�㡣ͼ7��ʾΪ1���������Զ��Ž���ά��ͼ��ͼ8��ʾΪ�Ž���XYƽ��ͼ��YZƽ��ͼ��
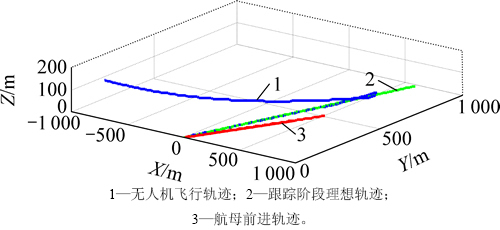
ͼ7 ���˻��Ž���άͼ
Fig. 7 Three-dimensional plot of a UAV landing
ͼ9��ʾΪ�����ٽβ��������λ�á��ٶ����ɿ�ϵͳ����ָ��ƫת����veY��veZ��peY��peZ�ֱ�Ϊ���˻��ٶȺ�λ����{F}����ϵ�²������������ͼ9���Կ������ڲ���Σ�����{F}����ϵTΪ���˻�����ָ��p0�㣬���ԣ�λ�����ʼ��Ϊ0���ٶ����Լ��22 s�����������˻���55 sʱ�ӽ�p0�㣬ת����ٽΣ��ٶȺ�λ�����Լ��20 s������0��
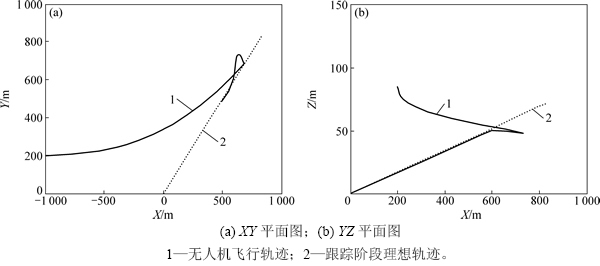
ͼ8 ���˻��Ž�XYƽ��ͼ��YZƽ��ͼ
Fig. 8 XY and YZ plots of a UAV landing
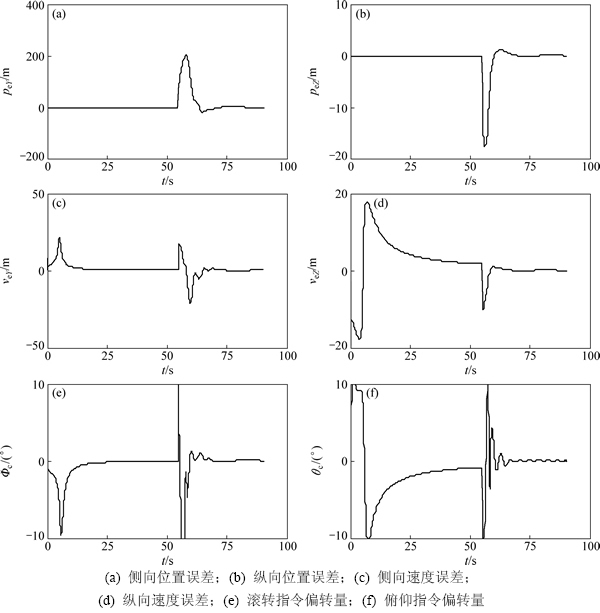
ͼ9 λ�á��ٶ����ɿ�ϵͳָ��ƫת��
Fig. 9 Positions, velocity errors and amount of deflection flight system command
���ڷɻ���ʼ�ٶȷ��������뺽��֮��ļнǷdz���������ѡȡ���˻���ʼλ������Ϊ(1 000��1 400��130)���ٶȷ���λʸ��Ϊ(0.5��0.866��0)���ڲ����ʼ�������СΪ10��ij�ֵ��תָ�ʹ���ٶȷ�����ٶ�p0�㣬�Ž�������ͼ10��ʾ��
��ͼ7~10�ɼ�������ѡ�����˻����ٶȷ���ͳ�ʼλ�ã�����Ƶ����˻��Զ��Ž�ϵͳ���ܺܺõ��������˻��Ž����Զ��Ž��㷨�����������Ч���Ϻá�
�Ժ���4Ϊ�������Ž����ܣ����н�500�η��棬���˻��ij�ʼ�ٶȷ�����XYƽ���ڣ�����X��ļн�60��Ϊ�����0�㵽360��֮��仯����ʼλ����X���Y���ϣ���250 m��������-750 m�仯��750 m����ʼ�߶ȴ�75 m��ʼ��25 mΪ�����仯��125 m��
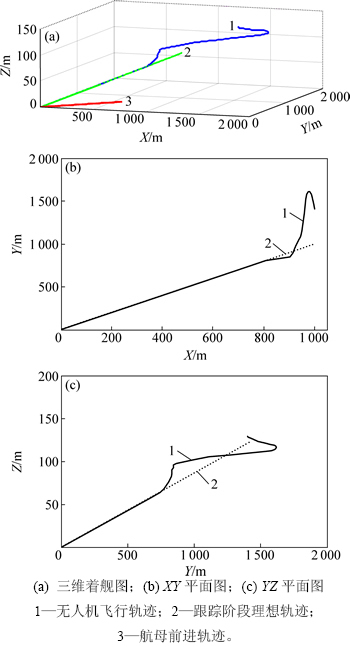
ͼ10 ���˻���ij�ֵ��ת����ָ���������
Fig. 10 Results of UAV landing under large values of roll rate command
��1��ʾΪ��ͬ��������Ӱ�������˻����Ž����ܡ����У�Seastate 4��ʾ���뺣��4��Nav ��ʾ���뵼����Airwake��ʾ���뽢β����ͼ11��ʾΪ�ں���4�£����뽢β���͵���������Ž��ֲ���
��ͼ11���Կ��������ɺ���Ӱ��ƽ�����ͱ�ƫ���С�����뵼�������Ž����ܵ�Ӱ���С���������Ժ��ԡ���β�����Ž�����Ӱ��ϴ�ƽ�����ͱ�ƫ���������ӣ��Ž���ֲ���Χ��������⣬��ֵ����������������3���Ž������£�ƽ�����ͱ�����ܷ����Զ��Ž����յĹ淶[16, 20]��
��1 ��ͬ�����������Ž����ܷ���
Table 1 Landing performance analysis with different disturbance sources


ͼ11 ���˻��Ž����ڻ������ϵķֲ�(YZƽ��)
Fig. 11 YZ plot of position of UAV when crossing recovering net
5 ����
1) �����һ�ֻ����¶���������ϵ���Զ��Ž������㷨���ڲ���Σ�������ϵ�����˻��ռ�λ�õı仯����̬�仯���ڸ��ٽΣ�������ϵ�������Ž�����ı仯���仯���������˻��ڴ�����ϵ��λ�ú��ٶ����Ϊ0��ʵ�ֹ켣���١�����ƹ����н���˲�����ٽ��ٶ�ʸ��ƫ��㷨��ɢ�����⡣
2) ��˽������˻��Զ��Ž����������ϵͳ������Զ��Ž������㷨�����п���ϵͳ������ģ�����ƺͷ��档
3) ������Ƶ��Զ��Ž����������ϵͳ�����£��������˻����Ž��ն�ƽ�����ͱ�ƫ�����������ָ��Ҫ��
�ο����ף�
[1] �ƴ�ȫ, �ϲ�, ������, ��. �Զ���½/�Ž���������[J]. �й����Լ���ѧ��, 2010, 18(5): 550-554.
TANG Daquan, BI Bo, WANG Xushan, et al. Summary on technology of automatic landing/carrier landing[J]. Journal of Chinese Inertial Technology, 2010, 18(5): 550-554.
[2] LI Junnan, DUAN Haibin. Simplified brain storm optimization approach to control parameter optimization in F/A-18 automatic carrier landing system[J]. Aerospace Science & Technology, 2015, 42: 187-195.
[3] XIA Guihua,DONG Ran,XU Jiangtao, et al. Linearized model of carrier-based aircraft dynamics in final-approach air condition[J]. Journal of Aircraft,2015, 53(1): 1-15.
[4] ����, ������, Ԭ����. ���ػ������Ž��㴹ֱ�˶���Ԥ���벹��[J]. ����ѧ��, 2013, 34(7): 1663-1669.
ZHOU Xin, PENG Rongkun, YUAN Suozhong. Prediction and compensation for vertical motion of ideal touchdown point in carrier landing[J]. 2013, 34(7): 1663-1669.
[5] JOHNSTON J S, SWENSON E D. Feasibility study of global positioning system based aircraft-carrier flight deck persistent monitoring system[J]. Journal of Aircraft, 2010, 47(5): 1624-1635.
[6] HORN J F, SCHMIDT E M, GEIGER B R, et al. Neural network-based trajectory optimization for unmanned aerial vehicles[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(2): 548-562.
[7] CHAMSEDDINE A, ZHANG Y M, RABBATH C A, et al. Trajectory planning and replanning strategies applied to a quadrotor unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2012, 35(5): 1667-1671.
[8] SIKHA H, DEBASISH G. Optimal trajectory planning for unmanned aerial vehicles in three-dimensional space[J]. Journal of Aircraft, 2014, 51(2): 681-688.
[9] ZHANG Jiaming, LI Qing, CHENG Nong, et al. Nonlinear path-following method for fixed-wing unmanned aerial vehicles[J]. Journal of Zhejiang University Science C, 2013, 14(2): 125-132.
[10] KHANTSIS S. Control system design using evolutionary algorithms for autonomous shipboard recovery of unmanned aerial vehicles[D]. Melbourne: Royal Melbourne Institute of Technology. School of Aerospace, Mechanical & Manufacturing Engineering, 2006: 191-200.
[11] STORVIK M. Guidance system for automatic approach to a ship[D]. Trondheim: Norwegian University of Science and Technology. Mathematics and Electrical Engineering Department of Engineering Cybernetics, 2003: 32-68.
[12] ֣��Ӥ, ��һ��. ����������ػ�������Զ��Ž�����ϵͳ[J]. ������ѧ, 2011, 29(2): 37-40.
ZHENG Fengying, YANG Yidong. Counteracting side wind in automatic carrier landing system for variable swept wing carrier-aircraft[J]. Flight Dynamics, 2011, 29(2): 37-40.
[13] BANNETT R J. Optimal control of the F-8C in a fully automatic carrier approach[R]. Springfield: National Technical Information Service, 1972: 1-6.
[14] Ԭ����, ��һ��. ���طɻ��Ž���ȷ�켣���ٿ����о�[J]. ������ѧ, 2000, 18(3): 22-25.
YUAN Suozhong, YANG Yidong. Precision flight path control in carrier landing approach[J]. Flight Dynamics, 2000, 18(3): 22-25.
[15] ���뵤, ��ѩ, ����. ���ڷ����Զ�̬�滬ģ�������Ž�ϵͳ���[J]. ϵͳ��������Ӽ���, 2014, 36(10): 2037-2042.
ZHU Qidan, MENG Xue, ZHANG Zhi. Design of longitudinal carrier landing system using nonlinear dynamic inversion and sliding mode control[J]. Systems Engineering and Electronics, 2014, 36(10): 2037-2042.
[16] DENISON N A. Automated carrier landing of an unmanned combat aerial vehicle using dynamic inversion[D]. Alabama: Air University. Department of Air Force, 2007: 35-69.
[17] ��һ��. ���˻��Ž����������[M]. 1��. ����: ������ҵ������, 2013: 52-64.
YANG Yidong. Guidance and control of carrier UAV landing[M]. 1st ed. Beijing: National Defence Industry Press, 2013: 52-64.
[18] ������. ���ػ��Ž����̼װ��˶���ģ�����������о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2012: 22-46.
ZHANG Yonghua. Research on deck motion modeling and deck motion compensation for carrier landing[D]. Nanjing: Nanjing University of Aeronautics and Astronautics. School of Automation Engineering, 2012: 22-46.
[19] LIZARRAGA M I. Autonomous landing system for a UAV[D]. California: Naval Postgraduate School. Electrical Engineer, 2010: 120-128.
[20] MIDSHIPMAN J F S. Design specifications development for unmanned aircraft carrier landings[D]. Maryland: United States Naval Academy. Department of Aerospace Engineering, 2003: 15-40.
[21] MIL-F-8785C, Military specifications-flying qualities of piloted airplanes[S].
(�༭ ����ΰ)
�ո����ڣ�2015-08-07�������ڣ�2015-10-11
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(61273050��61403197)�����տ�ѧ����������Ŀ(2013ZA52002)�������У��������ҵ���ר���ʽ�������Ŀ(NS2015086)(Projects(61273050, 61403197) supported by the National Natural Science Foundation of China; Project (2013ZA52002) supported by the Aeronautical Science Foundation of China; Project(NS2015086) supported by the Fundamental Research Funds for the Central Universities)
ͨ�����ߣ�֣��Ӥ����ʿ�������о�Ա�����½��ػ��Ž������о���E-mail��zhfy@nuaa.edu.cn
ժҪ��������˻��Ž�����̬�仯�����Ծ�ȷԤ�������⣬���һ�ֻ�����������ϵ��̬�仯���Զ��Ž������㷨���ڲ���Σ�������ϵ�����˻��ռ�λ�õı仯����̬�仯���ڸ��ٽΣ�������ϵ������Ž�����ı仯����̬�仯���������˻���������ϵ�µ��ٶȺ�λ�������켣������������ʵ�����˻��ľ�ȷ������������ij�ͽ������˻�Ϊ����ۺϷ���ƽ̨����Ʒ��п���ϵͳ���Ż��켣���������������뽢β���͵���������������ܵ���֤���������о�������������Զ��Ž�ϵͳ���������˻�ʵ�ֽϾ�ȷ��ײ���Ž����գ��Ž����ܷ���Ҫ��
[1] �ƴ�ȫ, �ϲ�, ������, ��. �Զ���½/�Ž���������[J]. �й����Լ���ѧ��, 2010, 18(5): 550-554.
[4] ����, ������, Ԭ����. ���ػ������Ž��㴹ֱ�˶���Ԥ���벹��[J]. ����ѧ��, 2013, 34(7): 1663-1669.
[12] ֣��Ӥ, ��һ��. ����������ػ�������Զ��Ž�����ϵͳ[J]. ������ѧ, 2011, 29(2): 37-40.
[14] Ԭ����, ��һ��. ���طɻ��Ž���ȷ�켣���ٿ����о�[J]. ������ѧ, 2000, 18(3): 22-25.
[15] ���뵤, ��ѩ, ����. ���ڷ����Զ�̬�滬ģ�������Ž�ϵͳ���[J]. ϵͳ��������Ӽ���, 2014, 36(10): 2037-2042.
[17] ��һ��. ���˻��Ž����������[M]. 1��. ����: ������ҵ������, 2013: 52-64.
[18] ������. ���ػ��Ž����̼װ��˶���ģ�����������о�[D]. �Ͼ�: �Ͼ����պ����ѧ�Զ���ѧԺ, 2012: 22-46.
[21] MIL-F-8785C, Military specifications-flying qualities of piloted airplanes[S].
