
���ڶ�����ģ�͵Ĺ��̻�еҺѹϵͳ��������о�
������1�����廪2
(1. ��ɳ������ѧ �������е����ѧԺ������ ��ɳ��410076��
2. ���ϴ�ѧ ���繤��ѧԺ������ ��ɳ��410083)
ժ Ҫ��
ժ Ҫ�����һ����Թ��̻�еҺѹϵͳ�Ķ�����ģ�͵Ĺ�����Ϸ�����������ģ���Թ���ع�������(General regression neural network��GRNN)Ϊ����������ȫ�ֵݹ�ķ������ƣ�������̬GRNNģ�͡��÷�������Ϊ���Ŀ����Ͻ���ͬ�������Ķ�̬GRNNĿ�����ģ�ͣ�����ÿ��Ŀ�����ģ�͵ļ����ֵ��Ȼ�����Թ�����������ÿ��Ŀ�����ģ���У�����в�ƽ�����ڶ�Ӧ��ֵ��Χ�ڼ���ȷ���������͡�ʵ����������������ģ�͵Ĺ�����Ϸ���ȷ����ϳ�95%���ϵ�ϵͳ���ϡ�
�ؼ��ʣ�
Һѹϵͳ�����̻�е�������������ģ�������������ع���������
��ͼ����ţ�TP206.3 ���ױ�־�룺A ���±�ţ�1672-7207(2010)04-1385-06
Fault diagnosis of construction machinery hydraulic system based on multi-network model
HE Xiang-yu, HE Qing-hua
(1. College of Automobile and Mechanical Engineering, Changsha University of Science and Technology,
Changsha 410076, China;
2. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
Abstract: A fault diagnosis approach of construction machinery hydraulic system based on multi-network model was proposed. A dynamic general regression neural network (GRNN) model was established by introducing the global feedback to the GRNN. As a dynamic model with global recursion, dynamic GRNN model is feasible to identify nonlinear system. Firstly, multiple dynamic GRNN model was established for multiple target faults and a test threshold for each dynamic GRNN model was computed. Secondly, the sum of residuals�� square was developed to test model��s residual so as to determine the fault type. The results show that the test faults of 95% are correctly identified.
Key words: hydraulic system; construction machinery; fault diagnosis; multi-model fault diagnosis; general regression neural network (GRNN)
���̻�е��Ϊ��Ҫ��ʩ������װ�����ڹ��÷�չ�ͻ�����ʩ�����о�����Ҫ�ĵ�λ[1]��Һѹϵͳ�ǹ��̻�е�ĺ��IJ�����������Ĺ��������Ԥ������һֱ�ǹ��̻�е�Ĺؼ�����֮һ��һ��أ����̻�е�����������ӣ���������ʱ�䳤�����ر䶯��Һѹϵͳ�Ĺ��Ϸ���Ƶ�ʸߡ�����Һѹ�������Ÿ� �١���ѹ�ʹ��ʷ���չ�����̻�еҺѹϵͳ�Ĺ�ģ�����ܼ����Զ���ˮƽ������ߣ�Һѹϵͳ�Ĺ�����ø��Ӷ����븴�ӡ���ˣ��о����̻�еҺѹϵͳ�Ĺ�����Ϻ�Ԥ��������������߹��̻�еʩ���Ŀɿ��ԺͰ�ȫ�ԣ��ƶ��ҹ����̻�е�����������о�������Ҫ�������������ʵ�ü�ֵ[2]�����еĹ��̻�еҺѹϵͳ��������о�����ֻ������ijһ�����̻�е����ijһ�����ģʽ����ͨ���ķ����ó�������Ͻ������Щ����ֻ�е������������������Ϊ����ʱ���ܹ�ʵ��ȷ�Ĺ�����ϣ������˹������Ӧ�õķ�Χ�����̻�еҺѹϵͳ�Ĺ�������о���Ȼ���нϴ���о���ֵ����������Ҫ�������Ͻ�һ����߹�����ϵ��о�ˮƽ������ع�������(General regression neural network�����GRNN)ģ������Donald��1991�������һ�����������磬��������Parzen�Dz������ƵĻ���֮�ϣ����Զ������������й��Ʋ������ڻ����Ļع���档����ع���������Ҫ���ص������������ṩԤ��ģ�͵ľ�����ʽ���ع���ܹ�ͨ��ѵ�������Զ�����[3-4]��ʹ��Parzen�Dz������Ƶĸ����ܶȺ�����GRNNģ���ܹ����ÿһ��δ֪ģʽ��ѵ�����������������緽���� �ȣ�GRNNģ�;߱��˸�ǿ�ķ���������������Ԥ������������ѵ���Ĺ���Ҳ��Ϊ����Ч[5-6]�����ǣ�GRNNģ����Ȼ���߱�ȫ�ֶ�̬�ݹ������������GRNNģ�ͽṹ��δ����ȫ�ַ�����ɵġ���ȫ�ַ����Ķ�̬����Է����Զ�̬ϵͳ��ģ�кܸߵı�ʶ�ȣ����ر�������ϵͳ������Ͻ�ģ[7-11]���������˼·����������ͨ����GRNNģ�ͽṹ������ȫ�ֵݹ�ķ������ƣ������̬����ع�������ģ�ͣ���ƶ�̬GRNNģ�͡���̬GRNNģ�Ͳ����߱�GRNNģ�����е��ŵ㣬���ܹ�������Ч�ش�����̬�� �ݡ������������Ŷ�ģ������Ӧ���������о����� ��[12-14]����ģ�͵ĸ���Ҳ��Ӧ���ڹ����������Ѹ�ٳ�Ϊ�о��ȵ�֮һ[15-17]����Һѹϵͳ���ϻ�����֪��������Ϸ����Ĺ��̾���ϵͳ����������ϵͳ��ѧģ�Ͳ����ı�Ĺ��̡����ϵͳ����ij�ֹ���״̬�£���ô���Ϳ����ڸ��ֹ���״̬�½�������ģ�͡�����ϵͳ��N��Ŀ����ϣ�����Խ���N��Ŀ�����ģ�ͣ��Ӷ�ͨ���������ģ�͵Ĺ��ϼ��Ϳ���ʵ�ֹ�����ϡ��������Ķ�ģ��������о��У�ģ�͵�ѡ����Ҫ�����ڽ����͵���ѧģ�ͣ���״̬���̣����Ҵ�Ϊ����ģ�ͣ��������漰������ģ�͵Ķ�ģ������Ϸ�����û���о������ڴˣ�����������Թ��̻�еҺѹϵͳ���Զ�̬GRNNģ��Ϊ���������������ģ������Ϸ�����
1 ��̬GRNN����ģ��
1.1 ����ع�����(GRNN)
�����������x���������y�����ϸ����ܶȺ���Ϊf(x, y)����y�����x�Ļع�(������ֵ)�ɱ�ʾ Ϊ[3-6]��
 (1)
(1)
���У��ܶȺ���f(x, y)�Ĺ��ƿ���ͨ����ѵ������ʹ��Parzen�ķDz����������ӵõ�����Dz�������Ϊ
 (2)
(2)
����
![]()
![]()
ʽ�У�xiΪx�Ĺ۲�������yiΪy�Ĺ۲�ֵ����Ϊƽ��ϵ����nΪ��������mΪ�������x��ά����
ʹ��![]() ����f(x, y)������ʽ(1)�ɵõ���
����f(x, y)������ʽ(1)�ɵõ���
 (3)
(3)
����ʽ(3)����
![]()
���Եõ���
 (4)
(4)
����ֵ![]() Ϊ���������۲�ֵyi�ļ�Ȩƽ����ÿ���۲�ֵyi��Ȩ������Ϊ��Ӧ������xi��x֮��Euclid����ƽ����ָ������ʽ(4)��֪������ֵ
Ϊ���������۲�ֵyi�ļ�Ȩƽ����ÿ���۲�ֵyi��Ȩ������Ϊ��Ӧ������xi��x֮��Euclid����ƽ����ָ������ʽ(4)��֪������ֵ![]() ���������y�������۲�ֵyi�ı仯��Χ֮�ڡ�
���������y�������۲�ֵyi�ı仯��Χ֮�ڡ�
����ʽ(4)�������ع������磬�ṹ��ͼ1��ʾ�����������(Input layer)��ģʽ��(Pattern layer)����Ͳ�(Summation layer)�������(Output layer)��4����Ԫ��
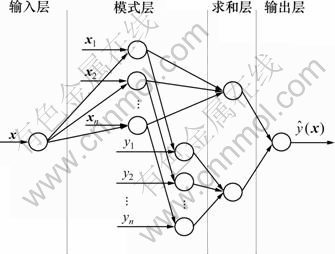
ͼ1 ����ع�����ṹͼ
Fig.1 Diagram of GRNN
1.2 ��̬GRNNģ�ͽṹ
��ȻGRNN�������ѵ��ʱ��̡���������������ǿ���ص㣬���ǣ���ֻ��һ�־ֲ��ݹ�ľ�̬����ģ�ͣ����߱�ȫ�ֵݹ�Ķ�̬���ԡ�����ڶ�̬��������ģ�ͣ�GRNNģ�͵�Ӧ�÷�Χ�ܵ��˽ϴ�����ơ�����ܹ���GRNN����Ľṹ���ԸĽ�������ȫ�ֶ�̬���ԣ��������GRNN�����ڶ�̬ʱ���ϵķ����Ա�ʶ���������ڴˣ������������һ�ֶ�̬����ع�����ģ�ͣ����Ϊ��̬GRNNģ�ͣ���ṹͼ�� ͼ2��ʾ��
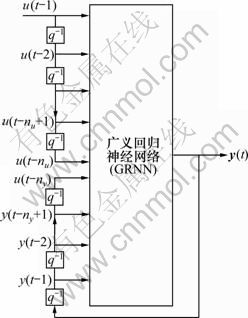
ͼ2 ��̬GRNNģ�ͽṹͼ
Fig.2 Diagram of dynamic GRNN
ͼ2�У���̬GRNNģ�͵�������Ա�ʾΪ��
![]()
���Եõ���Ӧ������ģ�����Ϊ��
![]() (5)
(5)
ʽ�У�![]() ����GRNN�̻��ķ�����ӳ�䡣
����GRNN�̻��ķ�����ӳ�䡣
��̬GRNNģ������ȫ�ֵĵݹ�ģ�ͣ�������ģ�������漰ģ�͵�Ԥ�����⣬��ǰһʱ�̵�ģ��Ԥ�����ֵ��Ϊ��һʱ�̵�ģ������ֵ��һ���Ԥ���Ϊ����Ԥ��ͶಽԤ�⣬���ڶ�̬GRNNģ�ͣ���Ҫʹ�öಽԤ�⡣
�趯̬GRNNģ��t=kʱ�̵ij�ʼ����Ϊ
![]() (6)
(6)
������ѵ����Ķ�̬GRNNģ�Ͷ���������ֵ����Ԥ�⣬��t=k+1ʱ�̵�ģ��Ԥ�����Ϊ
![]()
�������ƣ��ɵõ�t=k+2ʱ�̵�ģ��Ԥ�����Ϊ
![]()
![]()
��t=k+pʱ�̵�ģ��Ԥ�����Ϊ
![]()
![]() (7)
(7)
2 ��ģ�������
��ģ�ͷ����Ǽٶ�������N������ģ������ʵ�ʶ�̬ϵͳ�Ĺ������̣�����ϵͳ��ÿһ������ģ�Ͷ�Ӧ��һ����̬ģ�ͣ�ͬʱ��Ҳ��һ����̬ģ����������ϵͳ��������״̬��һ�����������״̬�ռ�ģ��������ϵͳ���������̼�����ģʽ[15-17]��
![]()
![]() (8)
(8)
ʽ�У�x(t)Ϊ״̬������u(t)Ϊ����������y(t)Ϊ���������Ai��Bi��CiΪϵ������i=1, 2, ��, N��NΪ����ģʽ����Ŀ��
����ģ���е�ϵ������Ai��Bi��Ci����Ӧ�ڶ�̬ϵͳ���ڲ�ͬ�Ĺ���ģʽ����ģ������Ϸ������Զ��ģ�����ƽ�ϵͳ���ڶ��ģ�͵Ļ����Ͻ��й��ϼ�⣬��ɻ���ij���л����Ե�ϵͳ������Ϲ��̣���������ͼ3��ʾ��ģ�ͼ��Ľ��������ϼ�ⷽ������ƺ�ģ�͵��л��Ƕ�ģ������ϵĺ������ݡ�
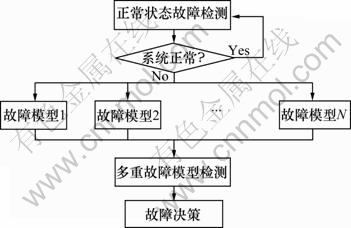
ͼ3 ��ģ�����������ͼ
Fig.3 Flow chart of multi-model fault diagnosis
2.1 ģ�ͼ��Ľ���
ѡȡϵͳN��Ŀ�����ģʽ������N�����ģ�ͣ����ɶ�ģ�ͼ���
![]() (9)
(9)
ʽ�У�![]() Ϊ��ģ�ͼ��ϣ�MiΪ��i�����ģ�͡�
Ϊ��ģ�ͼ��ϣ�MiΪ��i�����ģ�͡�
2.2 ���ϼ�ⷽ��
������ϵͳ��N��ģ���У�����һ��ģ������ȷ�ģ�Ҳ����˵��ϵͳ��N��Ŀ�����ģʽ������N��ģ���е�һ��������ȷ������������������Ͼ��Ϊ��ģ�͵Ĺ��ϼ�����⡣һ��أ�N��ģ�Ϳ��Բ�����ͬ�Ĺ��ϼ�ⷽ����
2.3 ģ�͵��л�
ʵ�ʵĶ�ģ������������ȶ�����״̬���й��ϼ�⣬��ϵͳ���ֹ���ʱ�����ֵ��ƫ����������ˮƽ����ʱ����Ҫ�л���������ģ�ͣ����б���ֵĹ���Ϊ���ֹ���ģʽ��
3 ������ģ������Ϸ���
���ϼ����ͨ������״̬ϵͳģ�͵IJв���ֵ�����еģ���ʵ���Ǽٶ�����״̬��ģ��������״̬��ģ�;��в����ԡ��������ԭ������ϵͳ��������Aʱ�����Խ�������A�Ķ�̬GRNNģ��GA�������������GA������в�С����ֵ��˵����������������Ĺ���ΪA������в������ֵ��˵��������������Ŀ���Ϊ�������ϣ���Ϊδ֪������������Ҫ��һ��������ϡ����ԣ����ϵͳ��N�ֹ���(����״̬Ҳ������һ�ֹ���)������Ϊÿһ�ֹ��Ͻ�����Ӧ�Ķ�̬GRNNģ�ͣ������������������ģ��ʱ�����в�С�ڶ�Ӧ����ģ�͵���ֵ��������ж��������͡����ԣ�������ģ�͵Ĺ�����Ϸ���������Ϊ��
(1) Ŀ����Ͻ�ģ��ij���̻�е��Һѹϵͳ��Ŀ����ϰ�����F1(����)��F2��F3������FN��N��Ŀ������(��������)�����ԣ���Ҫ����N��Ŀ����ϵĶ�̬GRNNģ�͡�
��������(F1)״̬�µĶ�̬GRNNģ��Ϊ![]() ���Դ����ƣ��ɵõ�����N-1��Ŀ����ϵĶ�̬GRNNģ��Ϊ
���Դ����ƣ��ɵõ�����N-1��Ŀ����ϵĶ�̬GRNNģ��Ϊ![]() ��
��![]() ������
������![]() ��
��
(2) ��ȡĿ����ϵļ����ֵ![]() ��
��![]() һ������Ϊѡ��������ֵ��Ӧ����ϵͳ�IJ�ͬ�ɾ���ȷ����һ��ȡ����״̬�����IJв�ƽ����J0��2~3�����в�ƽ���͵ı���ʽΪ
һ������Ϊѡ��������ֵ��Ӧ����ϵͳ�IJ�ͬ�ɾ���ȷ����һ��ȡ����״̬�����IJв�ƽ����J0��2~3�����в�ƽ���͵ı���ʽΪ
![]() (10)
(10)
ʽ�У�LΪ���ڵij��ȣ�ei��ʾ��i���в
(3) ���������ڶ������ģ���µIJв�ƽ���͡��ɼ����ۻ�·��Һѹ��й©�����������ֱ����![]() ��
��![]() ��
��![]() ������
������![]() �����Եõ������ڸ�������ģ���µIJв�ƽ���͡�
�����Եõ������ڸ�������ģ���µIJв�ƽ���͡�
4 ʵ�����
���о������õ�ʵ��ƽ̨Ϊ����ɽ�����ܻ�е�ɷ�����˾������SWE50���ھ�������ھ��Һѹϵͳ��Ҫ����ɲ��ְ�������������(Load sensing��LS)ϵͳ�ı���Һѹ�á��������ȵ�ʽ��·��������Һѹ�����תҺѹ�������װ�������ȡ�ʵ���в�����ʵ���ź���ҪΪѹ����������Ϊ�˱�֤ʵ���еIJ������ȺͿɿ��ԣ�ʹ�õ¹�Hydrotechnik��˾�Ĺ��̻�еҺѹϵͳר�ò�������������6ͨ���ֳ�ʽ������Multi-System 5050��������ѹ����������������������������
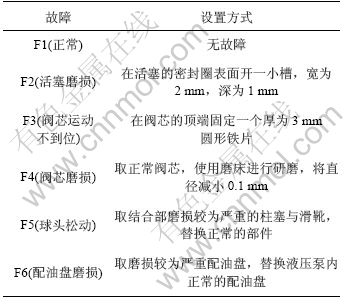
�������ö������յ�ʵ����Ӱ��ܴ�Ϊ�˱�֤ʵ�������ʵ�ʹ��Ͼ���һ���ԣ�ʵ�������õ�һ���ϡ����ϵ����ͺ��ϵľ������÷�ʽ���1��ʾ��
ʵ������Ҫ����4���źű����������������ó�������QP�������ó���ѹ��pP������Һѹ����ǻѹ��pA������Һѹ���и�ǻѹ��pB��ʵ�鲽��Ϊ���ٲ��ݲ��������ֱ������1�μ��ء�ж�صĶ��������غ�ж��֮�䱣��1 s�����л�ʱ�䣻�ڼ�¼QP��pP��pA��pB�ı仯��������ʱ����Ϊ5 ms������ʱ��Ϊ20 s����1�β�����ɺ������������ڲɼ�����Multi-System 5050�洢���С�ÿ�ֹ����ظ���������5�Σ��ֱ�ɼ�5�����������ɼ�30��������
��1 ʵ���е�һ����
Table 1 Experimental single fault
4.1 ����������·�Ķ�̬GRNNģ��
ʵ���еĵ�һĿ����ϰ���������(F1)������ĥ��(F2)����о�˶�����λ(F3)����оĥ��(F4)����ͷ�ɶ�(F5)��������ĥ��(F6)��6��Ŀ������(��������)����������(F1)״̬�µĶ�̬GRNNģ�ͱ���ʽΪ��
![]()
![]()
�������ĥ��(F2)״̬�µĶ�̬GRNNģ�ͱ���ʽΪ��
![]()
![]()
�������ƣ��ɵõ�����4��Ŀ����ϵĶ�̬GRNNģ�͡�6��Ŀ����ϵ�ģ�ͷֱ��ʾΪ![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��
4.2 ��ȡĿ����ϵļ����ֵ
�ɵõ�����(F1)״̬�ļ����ֵ��
![]()
ͬ�������Եõ�����5��Ŀ����ϵļ����ֵ��
![]()
![]()
![]()
![]()
![]()
��ʣ��������г�ȡ10��������Ϊ�����������ֱ����![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() ��
��![]() �У����������Ĺ�����Ͻ�����2��ʾ��
�У����������Ĺ�����Ͻ�����2��ʾ��
��2 ��������������Ͻ��
Table 2 Fault diagnosis result of test samples
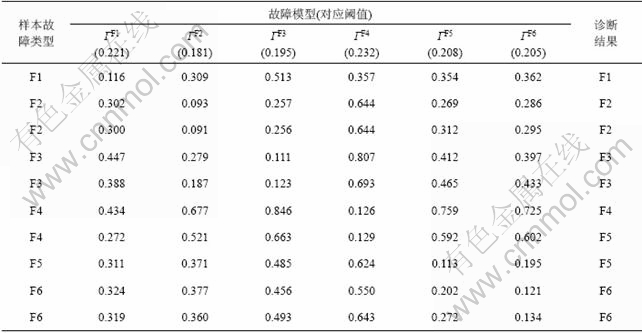
���ڶ�ģ������ϵķ��������ܻ����ij����������һ�����ϻ������ϣ������������(8)����Ӧ��![]() ��
��![]() �IJв�ƽ���ͷֱ�Ϊ0.113��0.195��С�ڶ�Ӧ����ֵ0.208��0.205�����ǵ�0.113��0.195�����Թ���ΪF5��ͬ��������ȷ����������(9)�Ĺ���ΪF5��ͨ�������вɼ����������IJ��Խ�����ۺ�20�����������95%���������õ���ȷ����ϣ��������ڶ�����ģ�͵Ĺ�����Ϸ����ܹ���Ч��Ӧ���ڹ��̻�еҺѹϵͳ��
�IJв�ƽ���ͷֱ�Ϊ0.113��0.195��С�ڶ�Ӧ����ֵ0.208��0.205�����ǵ�0.113��0.195�����Թ���ΪF5��ͬ��������ȷ����������(9)�Ĺ���ΪF5��ͨ�������вɼ����������IJ��Խ�����ۺ�20�����������95%���������õ���ȷ����ϣ��������ڶ�����ģ�͵Ĺ�����Ϸ����ܹ���Ч��Ӧ���ڹ��̻�еҺѹϵͳ��
5 ����
(1) ����˻��ڶ�����ģ�͵Ĺ��̻�еҺѹϵͳ������Ϸ������÷�������ΪҺѹϵͳ�Ķ��Ŀ����Ͻ�����̬GRNNģ�ͣ��Ӷ�ͨ�����Ŀ�����ģ�͵Ĺ��ϼ��ʵ�ֹ��̻�еҺѹϵͳ�Ĺ�����ϡ�
(2) ��SWE50���ھ��Һѹϵͳ�������˻���ĥ�𡢷�о�˶�����λ����оĥ����ͷ�ɶ���������ĥ��5�����ʵ����ϡ�����ʵ������������Ի��ڶ�����ģ�͵��ھ��Һѹϵͳ������Ϸ������м��飬�����ȷ�ʴﵽ95%���ϡ���̬GRNNģ���ܹ���Ч��Ӧ���ڹ��̻�еҺѹϵͳ�Ĺ��ϼ����� ��ϡ�
�ο����ף�
[1] ���廪, �Ŵ���, ����, ��. Һѹ�ھ������װ��ģ�ͼ����Ƶ������о�[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2006, 37(3): 542-546.
HE Qing-hua, ZHANG Da-qing, HAO Peng, et al. Model and experimental research on control of hydraulic excavator's manipulator[J]. Journal of Central South University: Science and Technology, 2006, 37(3): 542-546.
[2] HE Qing-hua, HE Xiang-yu, ZHU Jian-xin. Fault detection of excavator's hydraulic system using dynamic principal component analysis[J]. Journal of Central South University of Technology, 2008, 15: 700-705.
[3] Cigizoglua H K, Alpb M. Generalized regression neural network in modeling river sediment yield[J]. Advances in Engineering Software, 2006, 37: 63-68.
[4] Lee W Y, House J M, Kyong N H. Subsystem level fault diagnosis of a building's air-handling unit using general regression neural networks[J]. Applied Energy, 2004, 77(12): 153-170.
[5] Ben-Nakhi A E, Mahmoud M A. Cooling load prediction for buildings using general regression neural networks[J]. Energy Conversion and Management, 2004, 45: 2127-2141.
[6] Hansen J V. Learning experiments with genetic optimization of a generalized regression neural network[J]. Decision Support Systems, 1996, 18(3): 317-325.
[7] Marcu T, K?ppen-Seliger B, St��cher R. Design of fault detection for a hydraulic looper using dynamic neural networks[J]. Control Engineering Practice, 2008, 16(2): 192-213.
[8] Govindhasamy J J, McLoone S F, Irwin G W, et al. Neural modelling, control and optimisation of an industrial grinding process[J]. Control Engineering Practice, 2005, 13(10): 1243-1258.
[9] Skoundrianos E N, Tzafestas S G. Finding fault: Fault diagnosis on the wheels of a mobile robot using local model neural networks[J]. IEEE Robotics & Automation Magazine, 2004, 9: 83-90.
[10] Wong C X, Worden K. Generalised NARX shunting neural network modelling of friction[J]. Mechanical Systems and Signal Processing, 2007, 21(1): 553-572.
[11] Lee J M, Lee J H. Approximate dynamic programming-based approaches for input-output data-driven control of nonlinear processes Approximate dynamic programming-based approaches for input�Coutput data-driven control of nonlinear processes[J]. Automatica, 2005, 41(7): 1281-1288.
[12] WANG Xin, LI Shao-yuan, CAI Wen-jian. Multi-model direct adaptive decoupling control with application to the wind tunnel system[J]. ISA Transactions, 2005, 44(1): 131-143.
[13] Petre S, Yngve S, LI Jian. Multi-model approach to model selection[J]. Digital Signal Processing: A Review Journal, 2004, 14(5): 399-412.
[14] Cutululis N A, Ceanga E, Hansen A D, et al. Robust multi-model control of an autonomous wind power system[J]. Wind Energy, 2006, 9(5): 99-419.
[15] Drake K J, Campbell S L, Andjelkovic I. Naval Model-based failure detection on nonlinear systems: Theory and transition[J]. Engineers Journal, 2006, 119(2): 93-106.
[16] Nikoukhah R, Campbell S L. Auxiliary signal design for active failure detection in uncertain linear systems with a priori information[J]. Automatica, 2006, 42(2): 219-228.
[17] Nikoukhah R, Campbell S L. A multi-model approach to failure detection in uncertain sampled-data systems[J]. European Journal of Control, 2005, 11(3): 255-265.
�ո����ڣ�2009-10-21�������ڣ�2009-12-28
������Ŀ�����Ҹ����о���չ�ƻ�(��863���ƻ�)��Ŀ(2003AA430200)������ʡ���������л���������Ŀ(09C075)����ɳ������ѧ������ѧ�ߡ�������Ŀ(200807)
ͨ�����ߣ�������(1974- )���У�������̶�ˣ���ʿ����ʦ�����¹��̻�е���ܹ�������о����绰��13786149132��E-mail: hexiangyu@hotmail.com
(�༭ ����ɭ)
