
�����ɵ�������ģ���о�
��˧��������
(�廪��ѧ �������ѧ�뼼��ϵ��������100084)
ժ Ҫ��
�ɵĴ�������˫�������ģ�ͣ���ģ�͵��Ȳ�Ϊ�������ĵ��ɡ�ͨ����ֵ����ķ����о�������ģ����ˮƽ�����ϵIJ��У����Ե��ɵľ���ϵ���벽�е����ںͲ����Ĺ�ϵ�����о����о�����������������ɲ����κ��������Ŀ��ƣ���ģ���ܹ�ʵ����ƽ���ϵ����ܺIJ��С�
�ؼ��ʣ�
��������ģ����˫���������������������
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-0423-04
A spring-mass model with a torso
FENG Shuai, SUN Zeng-qi
(Department of Computer Science and Technology, Tsinghua University, Beijing 100084, China)
Abstract: A simple model of biped robot with a totally uncontrolled torso was established. In this model, the leg is a mass-less spring. Then the model was researched using numerical simulation method. The relationship between the stiffness of the spring with the step length and step period was investigated. The results show that this model can realize periodic level-ground walking, and that the torso can be uncontrolled at all during the walking.
Key words: spring-mass model; bipedal robot; walking; torso
��������ģ��(Spring-mass model)���������������˵��ܲ��˶�[1-3]���������в���ѧ����ͼ�ø�ģ�����о��˵IJ����˶�[4-5]����������ģ���ܹ�ʵ�������ԵIJ��л����ܲ��˶��Ѿ���Ϊһ�����ϵ���ʵ������ڵ�������ģ��������һ����������ʹģ���ӽ�����ʵ�Ļ����ˣ��Ի����˵���������Ƹ�����ָ�����壬Ҳ���ܸ������ؽ����˵IJ��к��ܲ��˶�������ĿǰΪֹ�������û���ⷽ����ص��о��������������߶������ɵĵ�������ģ�ͽ������о������Ƚ�����ģ�͵Ķ���ѧ���̣�Ȼ�������һ�����Ͳ��е�ʾ������ģ�����������岽�����ݽ����˱Ƚϣ����Ե��ɵľ���ϵ���벽�в����Ĺ�ϵ�����˷�����
1 ģ�ͽ���
�����˵��ܲ��˶��ĵ�������ģ����ͼ1��ʾ��ͼ2��ʾ��ģ�ͼ�Ϊ�����о��Ļ����˼�ģ�͡���ģ������2���ʵ㣺��ؽ��ʵ�mh�������ʵ�mu�����Ȳ�����һ���������ĵ��ɣ����ɵľ���ϵ��ΪK���ȵ����ɳ���Ϊl0�����ɵij��ȱ��ֺ㶨Ϊlu����1�ͦ�2�ֱ�Ϊ֧���ȽǶȺ����ɽǶȣ������Ե���ķ�������Ϊ�ο���lΪ֧���ȵij��ȡ���1����2��l������ģ�͵�3�����ɶȡ�ģ�͵ľ����������1��
�˵IJ���������һ������֧�Žκ�һ��˫���л��ι��ɡ�����ģ�͵�˫���л�˲ʱ��ɡ�������ɵ���֧�Žε�˲�䣬ԭ�ڶ��ȱ���µ�֧���ȣ�ԭ֧���ȱ���µİڶ��ȡ���ˣ�����ֻ�Ե���֧�ŽεĻ�����ģ�ͽ����о���
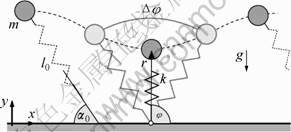
ͼ1 �������ܲ��˶��ĵ�������ģ��[3]
Fig.1 Running movement described by spring-mass model
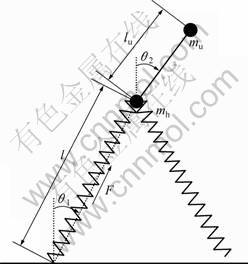
ͼ2 �����ɵĵ�������ģ��
Fig.2 Spring-mass model with a torso
��1 ģ�͵IJ���
Table 1 Parameter of the model

�ڵ���֧�ŽΣ�֧�ŵ���Կ����ǹ⻬�Ľ����ṹ�����Һ��Թؽ�Ħ�����α䣬����ģ��ϵͳ���������µĶ���ѧ���̽���������
![]() (1)
(1)
������
![]()
�������x0=[��1(0)����2(0)��l(0)����1(0)����2(0)��![]() ]Ϊ�������ڵ���֧�Žεij�ʼ״̬����������˲��е�����ΪT������ΪD�����Dz��е���������Գ��ԣ�һ������֧�������У�ģ�͵ij�ʼ״ֵ̬��ĩβ״ֵ̬Ӧ��������Լ����
]Ϊ�������ڵ���֧�Žεij�ʼ״̬����������˲��е�����ΪT������ΪD�����Dz��е���������Գ��ԣ�һ������֧�������У�ģ�͵ij�ʼ״ֵ̬��ĩβ״ֵ̬Ӧ��������Լ����
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (2)
(2)
ģ��ֻ����������Լ������Tʱ�̽���˫�Ƚ�ɫ��ת�������ܲ������ڵIJ����˶���
�趨q=[x0��K]�������ȷ�������˳�ʼ״̬�����ɵľ���ϵ�������㲽��T��DҪ�������ת��Ϊ���q����������Լ�������⡣һ��qȷ��������������֧�������ڻ�����ģ�͵�״̬����ͨ����ֵ���ַ�ʽ�ó�������Snopt���������Ͽ��н�������������⡣
2 ʵ������
�趨T=0.6��D=0.75������Matlab��ode113��ֵ���ַ�ʽ��ģ�͵IJ��н��з����о���
��ã�q=[-0.384��0��1��1 456��-0.562��-0.589��157.232]�����ڻ����˳�ʼ״̬x0Ϊ[-0.384��0��1�� 1 456��-0.562��-0.589]�����ɵľ���ϵ��Ϊ 157.232ʱ��ģ���ܹ�ʵ�ֲ���Ϊ0.75 m������Ϊ0.6 s�����ڲ��С�
ͼ3��ʾΪ������ģ�Ͳ��еĹ�״ʾ��ͼ������ģ���аڶ���û��������ʵ���Ͽ��������趨�ڶ��ȵ�λ�á�Ϊ�����ۣ��ʵ������˰ڶ��ȵij��ȣ��Ұڶ���λ��Ϊ֧����λ�õľ���ͼ4��ʾΪ������ģ�����ȵ�֧������ͼ5~7��ʾΪ������ģ�͵�״̬������ͼ3~7���Կ�����ģ���ܹ�ʵ�������ԵIJ��У��һ����˵�������û���κο��Ƶ�������ܱ��ֻ�����ֱ���������������У����ɵ�ѹ�����쳤���˴��������ܵ����ã����Բ��е��ܺ�Ϊ0��
ͼ8��ʾΪ�˲��������ɵĽǶ�[6]��Ϊ�˶Աȣ���ͼ7��ģ�͵IJ������ݽ���ת���������ͼ9��ʾ��
��ģ�Ͳ��в��������ɽǶ��������˲��������ɵĽǶ����ݽ��бȽϿ��Է��֣��������ݷdz�һ�¡���˵���ڲ����������ܿ����Ⱥ�С��
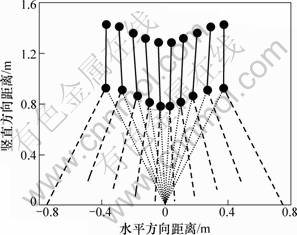
ͼ3 ������ģ�����ߵĹ�״ͼ
Fig.3 Walking sketch of robot model
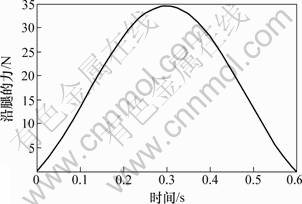
ͼ4 ���ȵ�֧��������
Fig.4 Curve of leg force
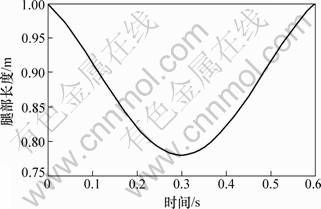
ͼ5 �ȳ�����
Fig.5 Curve of leg length

ͼ6 ֧���ȽǶ�����
Fig.6 Curve of stance leg angle
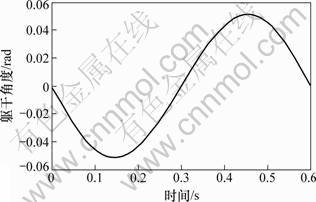
ͼ7 ���ɽǶ�����
Fig.7 Curve of torso angle
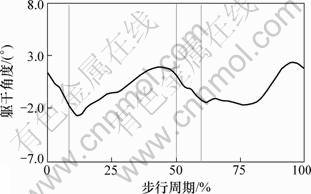
ͼ8 ���岽������[6]
Fig.8 Walking data of human
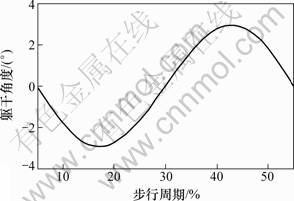
ͼ9 ģ�ͻ�õIJ�������
Fig.9 Walking data of model
���ɵľ���ϵ���벽�еIJ��������ڵĹ�ϵ��ͼ10��ʾ����ͼ10���Կ���������ϵ��K������T���������С�����沽��D�����Ӷ���С��
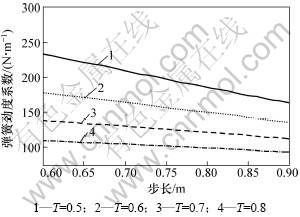
ͼ10 ���ɾ���ϵ���벽�в����Ĺ�ϵ����
Fig.10 Curves of spring stiffness versus walking parameters
3 ����
��Ȼģ���е�������ȫ���ܿأ�����ģ����Ȼ�ܹ�ʵ�����ڵIJ����˶������ڲ�����ģ�����ɵ��˶����������岽�������ɵ��˶�������һ�¡�
�ο����ף�
[1] McMahon T A, Cheng G C. The mechanics of running: How does stiffness couple with speed?[J]. Journal of Biomechanics, 1990, 23: 65-78.
[2] Blickhan R. The spring-mass model for running and hoping[J]. Journal of Biomechanics, 1989, 22: 1217-1227.
[3] Geyer H, Seyfarth A, Blickhan R. Spring-mass running: simple approximate solution and application to gait stability[J]. Journal of Theoretical Biology, 2005, 232(3): 315-328.
[4] Geyer H, Seyfarth A, Blickhan R. Compliant leg behaviour explains basic dynamics of walking and running[J]. Proceedings of the Royal Society B, 2006, 273(1603): 2861-2867.
[5] Whittington B R, Thelen D G. A simple mass-spring model with roller feet can induce the ground reactions observed in human walking[J]. Journal of Biomechanical Engineering, 2009, 131: 011013-1-8.
[6] Hirasaki E, Moore S T, Raphan T, et al. Effects of walking velocity on vertical head and body movements during locomotion[J]. Experimental Brain Research, 1999, 127(2): 117-130.
(�༭ �Կ�)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
ͨ�����ߣ�������(1943-)�����վ����ˣ����ڣ���ʿ����ʦ���������ܿ��ƻ����˵��о����绰��010-62788939��E-mail��szq-dcs@tsinghua.edu.cn
ժҪ������һ���������ɵĴ�������˫�������ģ�ͣ���ģ�͵��Ȳ�Ϊ�������ĵ��ɡ�ͨ����ֵ����ķ����о�������ģ����ˮƽ�����ϵIJ��У����Ե��ɵľ���ϵ���벽�е����ںͲ����Ĺ�ϵ�����о����о�����������������ɲ����κ��������Ŀ��ƣ���ģ���ܹ�ʵ����ƽ���ϵ����ܺIJ��С�
