
DOI: 10.11817/j.issn.1672-7207.2015.07.013
�Ĵ�ʽ�ƶ������˵�ת������
��ΰ�������У�ʩ�Ҷ�
(����������ѧ ��ը��ѧ�뼼�������ص�ʵ���ң�����, 100081)
ժ Ҫ��
�ƶ������˵�ת�����ԣ����ǻ������Ĵ��ĺ�������Ϊ���Էֲ����Ĵ������ĽӴ�ѹ��Ϊ���Էֲ������Σ��ֱ������ٺ���ת��ʱ�����˵�ת��������ģ�ͣ��Ա���������ת��ʱ���ܵĵ��������ء�����ֱ���˶��ܹ�����ת���˶��ܹ���֮��������������ת������׳̶ȣ������������ڴ�뾶��С�뾶ת���˶�ʱ������ԡ�����ת����У�˵綯���Ķ�������������������˵Ľṹ������ת��뾶��ת���ʵĹ�ϵ���о���������������˵�ת��뾶Խ��ת��Խ������Ĵ�������ת����ԽС�������˻��ƽ�Խ��ת����У��ϵ��Խ������Ĵ������ֹ���Խ��Ϊ�����˵Ľṹ�����Ż��͵綯����ѡ���ṩ���ݡ�
�ؼ��ʣ�
�Ĵ���������ת����������ת���������ת������
��ͼ����ţ�TP242 ���ױ�־�룺A ���±�ţ�1672-7207(2015)07-2474-07
Research on steering characteristics of tracked mobile robot
RAO Wei, WANG Jianzhong, SHI Jiadong
(State Key Laboratory of Explosion Science and Technology, Beijing Institute of Technology, Beijing 100081, China)
Abstract: In order to describe the steering characteristics of the tracked mobile robot, the linear distributions for lateral resistance of the robot��s track and contact pressure of the track and ground were considered. When the robot was steered at low speed and high speed, steering resistance moment model which indicated the ground resistance torque magnitude of robot steering was established separately. The difficulty of robot steering was expressed in terms of the ratio of total power of linear motion and steering movement. Flexibility of the robot was analyzed in a large radius and small radius steering movement. Rated load capacity of the motor was checked by the steering power. Relations structural parameters of the robot, turning radius and steering power were analyzed. Relations of structural parameters of the robot, turning radius and steering power were analyzed. The results show that the larger steering radius of the robot is, the more flexible the steering is, and the smaller steering power of the driving wheel of the outside track is. And the larger slip angle of the robot is, the greater the check coefficient of steering power is, and the greater steering power of the driving wheel of the outside track is. A theoretical basis is provided for the optimization of the robot��s structural parameters and the choice of motors.
Key words: tracked robot; steering resistance moment; turning flexibility; turning power
�Ĵ�ʽ�ƶ������˾��н�ǿ�ĵ�����Ӧ�������dz��ʺ��ڸ��ӻ�������ʹ��Ȼ������ʵ��ת���˶�ʱ�����ڻ��ƺͻ�ת��Ӱ�죬�Ĵ������������Ӵ�ѹ�����Ĵ��ĺ����������Ǿ��ȷֲ����Ի����˵�ת���������кܴ�Ӱ��[1-2]�������˵��ٺ���ת��ʱ��������Ĵ���ת���ʲ�ͬ��Ӱ������˵�ת�������[3]������б�Ҫ���������˵�ת���˶���A1-Milli��[4]�����˻����˵���������������������Ĵ��ϣ����������ķ���ֱ��������Ĵ����Ҵ�С��ȣ��õ�ת�������ؼ���ģ�ͣ���δ�����Ĵ��ĺ��������Ǿ��ȷֲ��Լ�����������λ�ñ仯������Ӱ�죻Solis��[5]���������ĸ߶ȱ仯��������Ӱ����Ĵ������Ӵ�ѹ���Ǿ��ȷֲ���ת�������ص�Ӱ�죬δ����ת�������ķǾ��ȷֲ����Ƿ���[6]�����˻����˴�뾶ת��ʱ��ת������ԣ�δ����С�뾶���ٺ���ת�������ԡ��������߿����Ĵ������������Ӵ�ѹ�����Ĵ��ĺ�������Ϊ�Ǿ��ȷֲ�������������λ�ñ仯��������Ĵ�֧������Ӱ�졢��뾶��С�뾶ת���ת���ʵ�Ӱ�죬���������˵ĵ��ٺ���ת�������ط��̡�����ת����ѧ���̡�ֱ���˶����ʺ�ת���˶����ʷ��̣���ת�������ء�ת�������ϵ����ת����У��ϵ������Ϊ������ת�����Ե�����ָ��[7]���ֱ�Ӳ�ͬ�ķ����о������˵�ת�����ܡ�
1 �����˵�ת������
�����˵�ת���˶�����С�뾶ת��뾶ת ��[7]��С�뾶ת��ʱ������Ĵ����ٶȷ������ڲ��Ĵ����ٶȷ����෴�γɲ����˶���ʵ�ֻ����˵�ת��뾶ת��ʱ��������Ĵ����ٶȷ�����ͬ����С��ͬʵ��ת������ֱ���˶����������������С��ת���˶��ĺ��������أ������ѡ����ʵ��������ʱ�����뿼�ǻ����˵�ת������[8-9]��
�����������Ƶ��Ĵ��ƶ���������ͼ1��ʾ����ͼ1�ɼ���������2���������ֲ��û���ת��Ȼ����ת��Ĺ����У����ٻ��ƺͻ�ת����ʹ�û����˵�ת�������غܴ������˵��������ش���ת��������ʱ������ʵ��ת���˶�������2��ǰ�ڱ۵���̬��������˱���Э��������ʵ�ָ��ӻ����µ�Խ���˶���
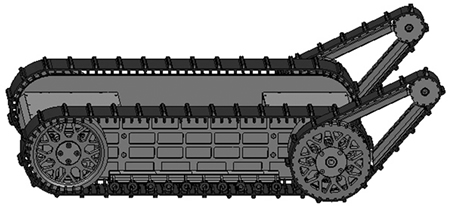
ͼ1 �Ĵ��ƶ������˵Ľṹͼ
Fig. 1 Structure of tracked mobile robot
2 �����˵�ת������
��������ת������У����裺
1) �������ھ��ȵ�ƽ��Ӳ�ʵ�������ʻ��
2) �������������������Ĵ�֮���������������������������֮�䴫�����������������Բ��ƣ�
3) ����Ե����Ĵ��ĺ����������Էֲ���
4) �����Ĵ������������Ӵ�ѹ�����Էֲ���
2.1 ����ת�������ط���
��������ʵ��ת��ʱ���Ĵ�����������Ӵ���ÿһ��ʵ���ܵ��ĺ�������������ͬ���ڵ���δ���ƻ�֮ǰ��Խ����ת��˲�ģ��Ĵ�����ԽС���Ĵ��ӵض�ĩ���������[10]�������˵���ת������������ͼ2��ʾ��������������Ӱ�죬�ڡ�����Ĵ����ܵ��ĺ�������Ϊ�������ڵ����������ϵ�������²���������[11]��
ͼ2�У�xoyΪ����������ϵ��oΪ�����˵����ģ�o��Ϊ������ת���˲ʱ���ģ�lΪ�����˱����ڡ�����Ĵ��ij��ȣ�l1Ϊǰ�ڱ�o2o3�ij��ȣ�l2Ϊ�����˵��Ĵ������ĽӴ����ȣ�m1Ϊ�����˱����������m2Ϊ2��ǰ�ڱ۵�������BΪ�����Ĵ������ľ��룻RΪ�����ֵİ뾶��rΪ�ڱ�С�ֵİ뾶��vc��vl��vr�ֱ�Ϊ���������ĵ��ٶȡ����Ĵ����ٶȺ����Ĵ����ٶȣ� Ϊ�����˵�ת����ٶȡ�
Ϊ�����˵�ת����ٶȡ�

ͼ2 �����˵���ת����������
Fig. 2 Force analysis of robot low-speed steering
��ͼ2�ɵã�
 (1)
(1)
ʽ�У�u1Ϊ��������ϵ����NzlΪ��������Ĵ���֧������NzrΪ��������Ĵ���֧������fyr(x)Ϊ�Ĵ������Ӵ�ʱ���Ĵ���ijһ���ܵ��ĺ���������xΪox���ϵĶ��㡣
���ʽ(1)���ַ��̿ɵ�
 (2)
(2)
�����˵���ת��ʱ���ڲ������Ĵ����ܵĺ���������Ϊ
 (3)
(3)
2.2 ����ת�������ط���
�����˸���ת��ʱ�������������뻬�ƽǵ�Ӱ�죬����ת��ʾ��ͼ��ͼ3��ʾ���������˵����ϴ��ز�ͬ������̽��װ��ʱ�����������ĵ�λ�ûᷢ���仯������ת��ʱ������Ĵ�����������������������£�����������Ĵ��ܵ��ĵ���֧������ͬ[12-14]���ɵõ�����ƽ�ⷽ�̣�
 (4)
(4)
 (5)
(5)
ʽ�У� Ϊ
Ϊ �߶���oy���γɵĻ��ƽǣ�F1Ϊ����ת�����������HΪz���������ĵ������ľ��룻R1Ϊ�����˵�ת��뾶��
�߶���oy���γɵĻ��ƽǣ�F1Ϊ����ת�����������HΪz���������ĵ������ľ��룻R1Ϊ�����˵�ת��뾶��
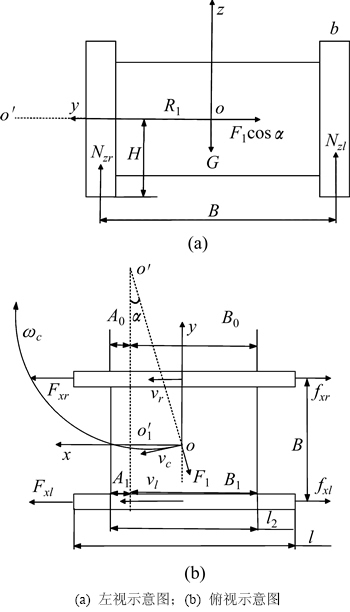
ͼ3 �����˸���ת����������
Fig. 3 Force analysis of robot high-speed steering
����˲�� ���Ĵ��������ϵ�ͶӰ��
���Ĵ��������ϵ�ͶӰ�� ���ĺ�������Ϊ���һ���������ת���ݻ����˸���ת���˶��������������ɵõ�����ƽ�ⷽ�̣�
���ĺ�������Ϊ���һ���������ת���ݻ����˸���ת���˶��������������ɵõ�����ƽ�ⷽ�̣�

 (6)
(6)
ʽ�У�Ϊ�߶���oy���γɵĻ��ƽǣ�dΪ �ľ��룻A0Ϊ�ڲ��Ĵ�ǰ�����ĵ��ľ��룻B0Ϊ�ڲ��Ĵ������������ĵ��ľ��룻A1Ϊ����Ĵ�ǰ�����ĵ��ľ��룻B1Ϊ����Ĵ������������ĵ��ľ��롣
�ľ��룻A0Ϊ�ڲ��Ĵ�ǰ�����ĵ��ľ��룻B0Ϊ�ڲ��Ĵ������������ĵ��ľ��룻A1Ϊ����Ĵ�ǰ�����ĵ��ľ��룻B1Ϊ����Ĵ������������ĵ��ľ��롣
 (7)
(7)
 (8)
(8)
��ʽ(8)�ɵõ������Ĵ���ת�������أ�
 (9)
(9)
����ת��ʱ��ת��������Ϊ

 (10)
(10)
2.3 ��뾶ת������Է���
�Ĵ�������ת��ʱ��ת������׳̶��Ǻ���������ת�����ܵ���Ҫָ�ꡣ����������ת�������������������ת�����ܡ�
�����˵�ת�������Ϊֱ���˶�����Ҫ�Ĺ�����ת���˶�����Ҫ�Ĺ��ʵı�ֵ[15-17]�����˶��ٶ���ͬʱ��ֱ���˶�����Ҫ�Ĺ���С��ת���˶�����Ҫ�Ĺ��ʡ���ͼ3��ʾ�����������˵�ת����ѧ�����飺


 (11)
(11)
 (12)
(12)
ʽ�У�Fxr��Fxl�ֱ�Ϊ�ں�����Ĵ�����������fxr��fxl�ֱ�Ϊ������ں�����Ĵ��������� Ϊ��������x�����˶��ļ��ٶȣ�
Ϊ��������x�����˶��ļ��ٶȣ� Ϊ��������y�����˶��ļ��ٶȣ�
Ϊ��������y�����˶��ļ��ٶȣ� Ϊ�����˵�ת��Ǽ��ٶȣ�IzΪ��������z����ת��ת��������M3Ϊ��������o����ת�����أ�M4Ϊ�����˵��ٻ����ת��ʱ��ת�������ء�
Ϊ�����˵�ת��Ǽ��ٶȣ�IzΪ��������z����ת��ת��������M3Ϊ��������o����ת�����أ�M4Ϊ�����˵��ٻ����ת��ʱ��ת�������ء�
 (13)
(13)
 (14)
(14)
ʽ�У�P1Ϊ����Ĵ�ת���ʣ�P2Ϊ�ڲ��Ĵ�ת���ʣ�P3Ϊ������ֱ����ʻ�������ʣ�u2Ϊ�����������ϵ����������ڡ�����Ĵ�������Ϊ
 (15)
(15)
�����˸���ת��ʱ��������Ϊ
 (16)
(16)
����ת��ʱ�����ٴ�뾶ת�������ϵ��Ϊ
 (17)
(17)
ʽ�У� ��
��
���ٴ�뾶ת�������ϵ��Ϊ
 (18)
(18)
2.4 С�뾶ת������Է���
��0��R1��B/2ʱ�������˽���С�뾶ת���˶�������Ĵ����ٶȷ������ڲ��Ĵ����ٶȷ����෴�γɲ����˶����Ӷ�ʵ��ת��[18-19]��
����С�뾶ת�������ϵ��Ϊ

 (19)
(19)
����С�뾶ת�������ϵ��Ϊ
 (20)
(20)
2.5 ת����У��ϵ��
������ת���˶�ʱ������Ĵ�������ת�ٺ�ת�ش����ڲ��Ĵ�������ת�ٺ�ת�أ��������Ĵ����������ʴ����ڲ��Ĵ����������ʡ����ڲ��Ĵ�����������ԶС�ڵ綯���Ķ����ʱ������Ĵ����������ʿ���Զ���ڵ綯���Ķ���ʣ����������������Ĵ������������ˣ�����У������Ĵ���ת���ʡ���������Ĵ�ת��ʱ������������ֱ���˶�ʱ����������֮������ʾת����У��ϵ�� [20]��
[20]��
����ת��ʱ��ת����У��ϵ��Ϊ

 (21)
(21)
����ת��ʱ��ת����У��ϵ��Ϊ
 (22)
(22)
3 ת�����Է������
�����˵�ת�����������������йأ���ҪӰ�����ذ����������˱����������2���ڱ۵����������ڱ������ľࡢǰ�������ľࡢ�����ְ뾶���ڱ�С�ְ뾶�����������ľࡣ��Ҫ�������1��ʾ��
3.1 ���ٺ���ת�������ط���
����������ϵ��u1=0.3ʱ�������������ϵ��u2=1.5 mm��vc=3 m/s��ת��뾶R1=100~200 mm�����ƽ�=10��~20�㣬����ת��������M1=9.03 N��m������ת��������M22=4.51 N��m��
3.2 ��뾶ת������Է���
����������ϵ��u1=0.3ʱ�������������ϵ��u2=1.5 mm��vc=3 m/s��ת��뾶R1=170~250 mm����뾶ת���������ϵ���Ĺ�ϵ������ͼ4��ʾ��
��1 �����˵���Ҫ����
Table 1 Main parameters of robot


ͼ4 ��뾶ת���������ϵ���Ĺ�ϵ����
Fig. 4 Relationship between large turning radius and flexibility coefficient
��ͼ4��֪����뾶ת��ʱ��ת�����ϵ��k��k������ת��뾶R1�����������ת��뾶�������˵�ת��Խ���ף������ƽ�=10��~20��ʱ��ת�����ϵ��k���Ż��ƽ���������������ƽ�=20��~25��ʱ��ת�����ϵ�� �������Ż��ƽ����������������������ƽ���20��ʱ�����������Ż��ƽǵ�����ת��Խ���ף�����20��ʱ��������ת������һ���ʡ�
�������Ż��ƽ����������������������ƽ���20��ʱ�����������Ż��ƽǵ�����ת��Խ���ף�����20��ʱ��������ת������һ���ʡ�
3.3 С�뾶ת������Է���
����������ϵ��u1=0.3ʱ�������������ϵ��u2=1.5 mm��vc=3 m/s��ת��뾶R1=100~160 mm��С�뾶ת���������ϵ���Ĺ�ϵ������ͼ5��ʾ����ͼ5��֪��С�뾶ת��ʱ��ת�����ϵ��k1�� ����ת��뾶R1�����������ת��뾶�������˵�ת��Խ���ף������ƽ�=10��~20��ʱ��ת�����ϵ��k1���Ż��ƽ���������������ƽ�=20��~25��ʱ��ת�����ϵ��k�������Ż��ƽ����������������������ƽ���20��ʱ�����������Ż��ƽǵ�����ת��Խ���ף�����20��ʱ��������ת������һ���ʡ�
����ת��뾶R1�����������ת��뾶�������˵�ת��Խ���ף������ƽ�=10��~20��ʱ��ת�����ϵ��k1���Ż��ƽ���������������ƽ�=20��~25��ʱ��ת�����ϵ��k�������Ż��ƽ����������������������ƽ���20��ʱ�����������Ż��ƽǵ�����ת��Խ���ף�����20��ʱ��������ת������һ���ʡ�
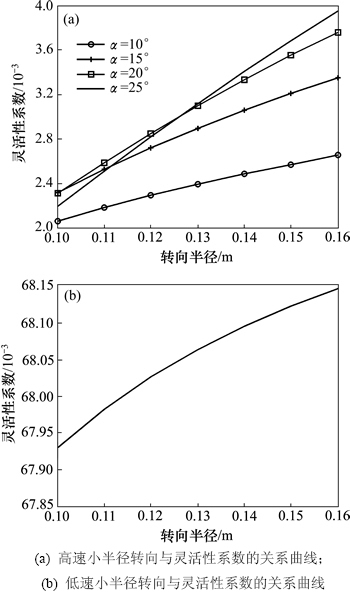
ͼ5 С�뾶ת���������ϵ���Ĺ�ϵ����
Fig. 5 Relationship between of small turning radius and flexibility coefficient
3.4 ת����У��ϵ������
����������ϵ��u1=0.3�������������ϵ��u2=1.5 mm��vc=3 m/s��ת��뾶R1=100~200 mm��ת��뾶��ת����У��ϵ���Ĺ�ϵ������ͼ6��ʾ��
��ͼ6��֪��������ת��ʱ��ת����У��ϵ���� ����ת��뾶R1���������С���������˵�ת��뾶Խ������Ĵ������ֵ�ת����ԽС��ѡȡ�綯���Ĺ���ԽС��ת����У��ϵ�����Ż��ƽ����������������Ĵ������ֵ�ת����Խ��
����ת��뾶R1���������С���������˵�ת��뾶Խ������Ĵ������ֵ�ת����ԽС��ѡȡ�綯���Ĺ���ԽС��ת����У��ϵ�����Ż��ƽ����������������Ĵ������ֵ�ת����Խ��

ͼ6 ת��뾶��ת����У��ϵ���Ĺ�ϵ����
Fig. 6 Relationship betwen turning radius and steering power checking coefficient
4 ����
1) ת��뾶R1Խ������ת��Խ��
2) �����ƽ���20��ʱ�����������Ż��ƽǵ�����ת��Խ���ף�����20��ʱ��������ת������һ���ʡ����ƽ�Խ��ת����У��ϵ��Խ������Ĵ������ֵ�ת����Խ��
3) �����˵�ת��뾶R1Խ������Ĵ������ֵ�ת����ԽС��ѡȡ�綯���Ĺ���ԽС��
�ο����ף�
[1] Lee C H, Kim S H, Kang S C, et a1. Double-track mobile robot for hazardous environment applications[J]. Advanced Robotics, 2003, 17(5): 447-459.
[2] Hamel W R, Murray P, Kress R L. Internet-based robotics and remote systems in hazardous environments: Review and projections[J]. Advanced Robotics, 2002, 16(5): 399-413.
[3] ������, ����ݥ. ���������Ĵ�ʽ���ڻ�����ת���˶�����Է���[J]. �Ϻ���ͨ��ѧѧ��, 2003, 37(Z1): 58-62
XU Zeliang,MA Peisun. Analysis of permanent magnetic tracked wail-climbing robot��s turning agile capability[J]. Journal of Shanghai Jiaotong University, 2003, 37(Z1): 58-62
[4] A1-Milli S, Seneviratne L D, Kaspar A. Track-terrain modeling and traversability prediction for tracked vehicles on soft terrain[J]. Journal of Terramechanics, 2010, 47(3): 151-160.
[5] Solis J M, Longoria R G. Modeling track-terrain interaction for transient robotic vehicle maneuvers[J]. Journal of Terramechanies, 2008, 45(3): 65-78.
[6] �Ƿ��, л����, ������. ���ֻ�����SUPER-01ת�����ܷ���[J]. �Ϻ���ͨ��ѧѧ��, 2005, 39(6): 895-899.
QIAO Fengbin, XIE Xiaopeng, YANG Ruqing. Analysis of SUPER-01 antiterrorist robot��s swerving performance[J]. Journal of Shanghai Jiaotong University, 2005, 39(6): 895-899.
[7] �κ���, ������, ���, ��. �Ĵ�����ת������ָ��������ʵ��[J]. װ�ױ�����ѧԺѧ��, 2008, 22(6): 65-68.
SONG Haijun,GAO Lianhua, LI Jun,et al. Correction and experiment of steering performance index of tracked vehicles[J]. Journal of Academy of Armored Force Engineering, 2008, 22(6): 65-68.
[8] ����, �����, �⽨��. ���ķǶԳ��Ĵ�ʽ������ת��뾶����������֤[J]. ���������ѧѧ��, 2011, 27(1): 11-15.
LIU Ning, SHAN Tigang, WU Jianhua. Revisionand verification turning radius base on asymmetric of deviation of tracked mobile robot[J]. Journal of Tianjin University of Technology, 2011, 27(1): 11-15.
[9] ��ΰ��,��,���.����ת��ʽ̽��������˶�ѧ����[J].�й���е����,2012, 23(2):166-171.
SHANG Weiyan, QIU Faju,YANG Chaozhen. Kinematics analysis of differential steering exploration robot with compound walking mechanism[J].China Mechanical Engineering, 2012, 23(2):166-171.
[10] �����, ����ʤ, ���˹�. �Ĵ�����������ѧ�����о�[J]. ���������, 2004, 21(12): 42-44.
WU Dalin, MA Jisheng, WANG Xingui. Research on track vehicle terramechanics simulation[J]. Computer Simulation, 2004, 21(12): 42-44.
[11] ��˼��, ŷ��, ������, ��. �Ĵ�ʽ�����ƶ������˶���ѧģ�ͷ���[J]. ���繤��, 2011, 28(3): 280-285.
HUANG Siji, OU Yi, TAO Weijun, et al. Dynamics modeling analysis for tracked mobile robot[J]. Journal of Mechanical & Electrical Engineering, 2011, 28(3): 280-285.
[12] ��ͬ��, ���, ��ɶ�, ��. �ɱ��λ�����Эͬת���˶��о�[J]. ������, 2008, 30(1): 34-40.
LIU Tonglin, LI Bin, WU Chengdong, et al. Cooperative turning for a reconfigurable mobile robot[J]. Robot, 2008, 30(1): 34-40.
[13] ŷ��, Ǯ�ַ�, ������, ��. ����������Ӧ����Ĵ�������ת�������ؽ�ģ�����[J]. �Ͼ�������ѧѧ��, 2012, 36(3): 516-522.
OU Yi, QIAN Linfang, TAO Weijun, et al. Modeling and analysis of steering resistance moment for tracked robot based on track-terrain strain[J]. Journal of Nanjing University of Science and Technology, 2012, 36(3): 516-522.
[14] ����, ����, �¿�. ���ڻ�������ģ�͵��Ĵ����������������[J]. ��е���������, 2006, 7(7): 119-121.
LI Yan,YANG Xiangdong,CHEN Ken. Tractive force design of tracked robot based on skip-steering model[J]. Machinery Design & Manufacture, 2006, 7(7): 119-121.
[15] Brown H B, Vande Weghe J M, Bererton C A, et al. Millibot trains for enhanced mobility[J]. IEEE/ASME Transactions on Mechatronics, 2002, 7(4): 452-461.
[16] Kim W, Yi B J, Lim D J. Kinematic modeling of mobile robots by transfer method of augmented generalized coordinates[J]. Journal of Robotic Systems, 2004, 21(6): 301-322.
[17] ����, ����, ���շ�. һ���Ĵ������˻��Ʋ������Ʒ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(8): 3173-3178.
ZHU Lei, GUO Jiang, LIU Gangfeng. Slip estimation method of track robot[J].Journal of Central South University (Science and Technology), 2013, 44(8): 3173-3178.
[18] ����, ��ɶ�, ���. �ɱ��λ�����ֱ�߹��ͻ���ת�� [J]. ��е����ѧ��, 2012, 48(7): 9-15.
CHANG Jian, WU Chengdong, LI Bin. Shape-shifting robot skid turning with line configuration[J].Journal of Mechanical Engineering, 2012, 48(7): 9-15.
[19] �̾�ΰ, ������, ������, ��. ���ڴ������µ��Ĵ���������ת�����[J]. �����붯������, 2006, 101(1): 44-48.
CHENG Junwei,GAO Lianhua,WANG Liangxi, et al. Analysis of tracked vehicles steering at a high speed considered tracks' skid and slip[J]. Vehicle & Power Technology, 2006, 101(1): 44-48.
[20] ������, ������, ��괺. �Ĵ�����������ϵͳС�뾶ת������о�[J]. �����붯������, 2003, 90(2): 29-34.
TENG Qizhi, GU Zhongli, SUN Fengchun. Numerical research on small radius steering of tracked vehicles�� electric drive system[J]. Vehicle & Power Technology, 2003, 90(2): 29-34.
(�༭ ��)
�ո����ڣ�2014-11-20�������ڣ�2015-01-25
������Ŀ(Foundation item)�������������мƻ�������Ŀ(B2220110013) (Project(B2220110013) supported by the Defense Industrial Technology Development Program)
ͨ�����ߣ������У���ʿ�����ڣ�����С��������սƽ̨�������������������뼼���о���E-mail: cwjzwang@bit.edu.cn
ժҪ��Ϊ�������Ĵ�ʽ�ƶ������˵�ת�����ԣ����ǻ������Ĵ��ĺ�������Ϊ���Էֲ����Ĵ������ĽӴ�ѹ��Ϊ���Էֲ������Σ��ֱ������ٺ���ת��ʱ�����˵�ת��������ģ�ͣ��Ա���������ת��ʱ���ܵĵ��������ء�����ֱ���˶��ܹ�����ת���˶��ܹ���֮��������������ת������׳̶ȣ������������ڴ�뾶��С�뾶ת���˶�ʱ������ԡ�����ת����У�˵綯���Ķ�������������������˵Ľṹ������ת��뾶��ת���ʵĹ�ϵ���о���������������˵�ת��뾶Խ��ת��Խ������Ĵ�������ת����ԽС�������˻��ƽ�Խ��ת����У��ϵ��Խ������Ĵ������ֹ���Խ��Ϊ�����˵Ľṹ�����Ż��͵綯����ѡ���ṩ���ݡ�
[3] ������, ����ݥ. ���������Ĵ�ʽ���ڻ�����ת���˶�����Է���[J]. �Ϻ���ͨ��ѧѧ��, 2003, 37(Z1): 58-62
[6] �Ƿ��, л����, ������. ���ֻ�����SUPER-01ת�����ܷ���[J]. �Ϻ���ͨ��ѧѧ��, 2005, 39(6): 895-899.
[7] �κ���, ������, ���, ��. �Ĵ�����ת������ָ��������ʵ��[J]. װ�ױ�����ѧԺѧ��, 2008, 22(6): 65-68.
[8] ����, �����, �⽨��. ���ķǶԳ��Ĵ�ʽ������ת��뾶����������֤[J]. ���������ѧѧ��, 2011, 27(1): 11-15.
[9] ��ΰ��,��,���.����ת��ʽ̽��������˶�ѧ����[J].�й���е����,2012, 23(2):166-171.
[10] �����, ����ʤ, ���˹�. �Ĵ�����������ѧ�����о�[J]. ���������, 2004, 21(12): 42-44.
[11] ��˼��, ŷ��, ������, ��. �Ĵ�ʽ�����ƶ������˶���ѧģ�ͷ���[J]. ���繤��, 2011, 28(3): 280-285.
[12] ��ͬ��, ���, ��ɶ�, ��. �ɱ��λ�����Эͬת���˶��о�[J]. ������, 2008, 30(1): 34-40.
[14] ����, ����, �¿�. ���ڻ�������ģ�͵��Ĵ����������������[J]. ��е���������, 2006, 7(7): 119-121.
[17] ����, ����, ���շ�. һ���Ĵ������˻��Ʋ������Ʒ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2013, 44(8): 3173-3178.
[18] ����, ��ɶ�, ���. �ɱ��λ�����ֱ�߹��ͻ���ת�� [J]. ��е����ѧ��, 2012, 48(7): 9-15.
[19] �̾�ΰ, ������, ������, ��. ���ڴ������µ��Ĵ���������ת�����[J]. �����붯������, 2006, 101(1): 44-48.
[20] ������, ������, ��괺. �Ĵ�����������ϵͳС�뾶ת������о�[J]. �����붯������, 2003, 90(2): 29-34.
