
DOI: 10.11817/j.issn.1672-7207.2016.05.039
��������Ը��ٹ�·˫������ͨ����Ӱ��
�����������飬������
(��·���̽������ص�ʵ���ң���ɳ������ѧ������ ��ɳ��410114)
ժ Ҫ��
ʹ��Ȩ���ij������ٹ�·���������Ϊ�Գơ����Գơ��ɷ�����·���4�࣬���ݻ���������������Ϊ�������ͺ��������ͺ�ͳһ����������4����������Ӧ��Ԫ���Զ���ģ�ͣ���VC++���ʵ��Ԫ���Զ���ģ�⣬���ǿ쳵(С�ͳ�)������(�����)�ij��ȡ�����ٶȺ������ٶȲ��졣�о�����������ٽ��ܶȺ������ٶȶ��뻻�������أ���ͬ����������ɵIJ��������ܶȺ��������ʵ��������С�����������ʽ�С���е��ܶ�������Գƹ�����ȣ�����3�ֹ���ͨ�������ı䳵���ֲ����ɴ���ȼ��ٳ�ͻ����߿쳵�ٶȣ�����3�ֹ����¿쳵�ٶȽ����������ʽ�С�ҿ����ٽ��ܶȵ����ܶ������ڲ��졣
�ؼ��ʣ�
�ij������ٹ�·��˫������ͨ���������������������Ԫ���Զ�����ģ����
��ͼ����ţ�U491.1+12��U491.2+6 ���ױ�־�룺A ���±�ţ�1672-7207(2016)05-1752-08
Influence of lane-changing rules on two-lane traffic flow of freeway
YANG Liu, HUANG Zhongxiang, KUANG Aiwu
(Key Laboratory of Highway Engineering of Ministry of Education, Changsha University of Science & Technology,
Changsha 410114, China)
Abstract: According to the lane function and its use rights, lane-changing rules on four-lane freeways were classified into four types, i.e., symmetric, asymmetric, old-law and new-law, which could be described uniformly and reasonably through classified lane-changing motivations, i.e. intended and unintended. Based on the classifications, corresponding cellular automaton models were proposed, its simulation was realized through the VC++ programming taking into account the differences between cars and trucks in their length, the maximum speed and the maximum acceleration. The results show that critical density and truck speed are independent of the lane-changing rules. The difference caused by different rules decreases with the increase of density and truck ratio. In the low and medium density range where the truck ratio is small, compared with the symmetric rule, the other three rules can change the vehicle distribution by lane changing, which can reduce conflicts and increase car speed significantly. Car speed under the other three rules is different only in the medium density range near the critical density where the truck ratio is small.
Key words: four-lane freeway; two-lane traffic flow; truck; lane-changing rule; cellular automata; simulation
���ڸ��ٹ�·��Ҫ�ǿͳ��ͻ��������ʻ��˫���ij�����·����ʵ�ʽ�ͨ����Զû�дﵽ���ͨ������ʱ��������ӵ�¡�̽Ѱ�ͻ����������»�������Ը��ٹ�·��ͨ���е�Ӱ����ɣ���������ʶ�ͽ��ӵ�����������Ҫ���塣ͨ����ģ�Խ�ͨ������������֡����ͺ�Ԥ�����о���ͨ���Ļ�������������ģ�ͶԸ��ֽ�ͨ�������ܸ�����Ӧ���ͣ����ܶ���ʶ��û��ͳһ[1]��ģ���Ƕ���ʵ�ij���������ֻҪ�ܷ�ӳ��ģ�����Ĺؼ����Ծ�����Ч��[2]�������[3]���ݽ�ģ˼�룬����ģ�ͷ�Ϊ��ͨ�������ͳ�������࣬ǰ�߲����������ۼ�ʻ��Ϊ����ȷ���ʵ�ʼ�ʻ���ݣ����߲�����������۽�ͨ���ԣ�չ�ֽ�ͨ������ѧ������Ԫ���Զ���ģ������ͳ�������࣬������ɢ����ࡢ����Ч�����㷺���á���WOLFRAM[4] �����184�Ź���Ϊ������NAGEL��[5]����˵�����Ԫ���Զ���ģ�ͣ����NaSchģ�ͣ��������Է�������ʱ��ʱͣ������������о���������˸��ָĽ�ģ����ģ����Ӹ��ӵĽ�ͨ����CHOWDHURY��[6-7]�Ը���ģ�ͽ����˷�����ܽᡣRICKERT��[8]��NaSchģ��Ϊ�����������˫��������һ���������µĶԳƺͲ��Գƻ�������CHOWDHURY��[9]��RICKERT��[8]����Ļ���������չ�����������������£�Ҳ�����ԳƺͲ��Գƻ���2�������NAGEL��[10]�Ե�ʱ�����˫����������������˹����ܽᡣ����CHOWDHURY�Գƻ�������[9]���о������ּ�����һЩ��ʵ���أ��������õ�[11]���쳵����[12]��˫����������������[13]�ͼ�ʻ����Ϊ���Բ���[14]�ȡ�����ȵ�[15]�Թ��ڸ��ٹ�·�ϼ�ʻԱ�Ļ�����Ϊ������ʵ���ͳ�Ʒ������õ��˻���Ƶ�ʡ����ٶȺ�ת���ʹ���ʵȲ��������о���[16]�����˻��ֿ�������ʱ�ܶȺ��������ʶԽ�ͨ����Ӱ�졣Ŀǰ�����ǶԸ��ٹ�·˫������ͨ�����о���Ҫ�����������⣺һ��û�����������ڸ��ٹ�·�ij������Ժͻ������ԣ�����ȱ�ٶԸ��ֻ�������ĺ������ࡢͳһ�����ͽ�ģ������û��ȫ������ͱȽϸ��ֻ�������Խ�ͨ���е�Ӱ�졣����������⣬����������ʵ�ʳ������Ժͻ�������Ϊ����������Ԫ���Զ�����ģ��ͨ��ģ��ʵ��̽�ֲ�ͬ��������Ը��ٹ�·��ͨ����Ӱ����ɡ�
1 ���ٹ�·ϵͳ����
1.1 ��������
�Գ��������Ŀ���Ǽ��ٽ�ģ�������࣬ʹ���������ԭ����ͬ��������κ��������Ի�����ͬ��ͨ���ɼ����۰ĸ��ٹ�·��ɳ�εij��١����ͳ����Ȳ�������ͳ�Ʒ��������ֳ�����Ҫ��С�ͳ��ʹ����2��������ɣ����ߵij��Ⱥ������ٶȲ����������������ƽ��������С�ͳ���2�����ϡ��ڸ��ٹ�·ƽֱ·�ε�������״̬�£�С�ͳ��ʹ�����������ٶȷֱ�Ϊ120 km/h��75 km/h[17]�������������Ϳͳ�����С�ͻ����ڽ�ͨ����ռ���ʽ�С������Ӱ�콻ͨ���е���Ҫ���أ��ڽ�ģʱ���迼�ǡ��ڱ����У��ÿ쳵�������ֱ����С�ͳ��ʹ������
1.2 �����������
�������ٹ�·�ij�����ɺͳ������ܲ�ͬ�������������ʶ��������ҹ����ٹ�·��ͨ������һЩ������2004����ǰʵ�С����ٹ�·��ͨ�����취��(��ƾɷ���)��2004��䲼��ʵ�С���·��ͨ��ȫ��ʵʩ������(����·���)����2������IJ�ͬ���ǣ�1) �ɷ����з�Ϊ���������г������·����з�Ϊ�쳵��(С�ͳ���)��������(�ͻ�����)��2) �ɷ�������ֻ�����ڳ��������г��������ܳ�ʱ��ռ�������·����з������ٶȺͳ������Ƶij�����������ʱ����ʻ��
���ĸ��ݳ������ܺ�ʹ��Ȩ�������ٹ�·���������Ϊ����4�ࣺ
1) �Գƹ���2�������Ĺ���û�����𣬿쳵��������2������ӵ����ͬ��ʹ��Ȩ���������ڳ����ͳ��Ͷ��Գơ�
2) ���Գƹ���2��������Ϊ�쳵�������������쳵����ʹ�ÿ쳵������������ʹ�����������������ڳ����ͳ��Ͷ����Գơ�
3) �ɷ������2��������Ϊ���������г������쳵������������ʹ���г������������ڳ������Գƣ����ڳ��ͶԳơ�
4) �·������2��������Ϊ�쳵�������������쳵��2������ӵ����ͬ��ʹ��Ȩ����������ʹ�����������������ڿ쳵�Գƣ������������Գơ�
1.3 ��ͨ״̬����
��ͨ�����̬����Ӧ���ܶȳ�Ϊ�ٽ��ܶȡ���ͳ�Ͻ�����ͼ���ٽ��ܶ�����֧��Ϊ���������Ҳ��֧��Ϊӵ����������ֻ�ʺ��ھ��ʽ�ͨ�����Ի�Ͻ�ͨ�����ԣ��쳵����ʻ״̬���ܵ�������Ӱ�죬��ˣ�����ʹ���ܶ����������ֺ�������ͨ״̬������ͼ���ٽ��ܶ�����֧���°벿Ϊ���ܶ������ϰ벿Ϊ���ܶ������ϳ�Ϊ�е��ܶ������Ҳ��֧���ϰ벿Ϊ���ܶ������°벿Ϊ��������
2 ������ʻ����ģ
NaSchģ����[5]������ǰ���ļ����������ʻ�ٶȣ����������˳����˶��еļ��١����١���ȫ�ԡ�����Եȱ������⡣���Ķ�NaSchģ�ͽ��иĽ�����ʱ��t��t��1�����У��������¹����ݻ���
1) �����ٶȣ�v��min(vexpect,d)��vexpect=min(v+amax, vmax)��
2) ����������Ը���p��v��max(v-b,0)��rand(0,1)��p��b=randInt(1,bmax)��
3) ����λ�ã�x��x+v��
ʽ�У�vexpectΪ���������ٶȣ�dΪ������ǰ���ļ�ࣻamaxΪ���������ٶȣ�������������ʹ�������ٶȵ�ԭ����ʻ��vmaxΪ��������ٶȣ�pΪ�����������ʣ�rand(0,1)��ʾ������[0,1]���ȡֵ��bΪ�������ʱ�ļ��ٶȣ�bmaxΪ��������������ٶȣ�randInt(1,bmax)��ʾ������[1,bmax]���ȡ����ֵ������ȡbmax=amax��
3 ��������ģ
���ڳ������Ͳ���ͳ������ܲ��죬��ͬ���͵ij����ڲ�ͬ�����ϵĻ���������������Ϊ�������������𣬸��ݳ�����ѡ��ʱ�����ض����ɽ�������Ϊ�������ͻ������������ͻ�����
1) �������ͻ�����ָ�������ȱ����ڵ�ǰ������ʻ�������Ķ��������ǣ�ֻ���ڵ�ǰ�������ܰ������ٶ���ʻ���ڵ�ǰ������ʻ�����ȵ�ǰ������ʻ�����õ�����£��Ż��������������
2) �������ͻ�����ָ�������Ȼ����ڵ���ʻ�������Ķ��������ǣ�ֻҪ���ڵ��ܰ������ٶ���ʻ���ڵ�ǰ������ʻ�������ȵ�ǰ������ʻ�����������£��ͻ��������������
��Ȼ�����������ͻ�����ȣ��������ͻ����Ķ������������ɣ���Ŀ�공���������Ե������ԣ�������ֻ��Ϊ�˸�����ʻ�������ۺ����Ϸ������ɹ�����Ӧ��������3��������
1) �����������������ͻ���Ӧ����d<>expect�� dother>d���������ͻ���Ӧ����dother��vexpect��dother��d��vexpect=min(v+amax,vmax)��
2) ��ȫ������dback other��dsafe��
3) ����������Ը���pc��������rand(0,1)��pc��
ʽ�У�dotherΪ�������ڵ�ǰ���ļ�ࣻdback otherΪ�������ڵ��ļ�ࣻdsafeΪ��ȫ��࣬��֤�������������ڵ���������ײ��pcΪ�����������ʡ�
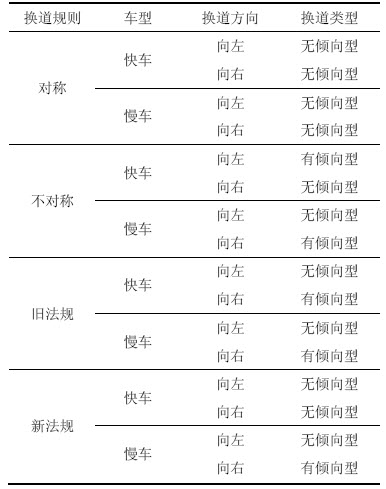
��������Ϊ�������ͺ��������ͺ����������������ֻ���������1��
��1 ���ֻ������������
Table 1 Description of each lane-changing rule
4 ��������Ӱ�������ģ�����
�ۺϲο�����о�[8-18]������ģ��ʵ����֤����ģ�Ͳ���ȡֵ���£��������ڱ߽�ͳ�ʼ���ȷֲ���ʱ�䲽��Ϊ1 s��ÿ����������10 000 s��ͳ��5 000~ 10 000 s�����в��������������ٶȡ������ʡ�����ʹ���ʺͳ�ͻ�ʣ�ȡ50����������ͳ��ƽ����Ԫ������Ϊ3.5 m����·����Ϊ7 000 m���쳵����Ϊ7 m������ٶ�Ϊ126 km/h�������ٶ�Ϊ14 m/s2����������Ϊ14 m������ٶ�Ϊ75.6 km/h�������ٶ�Ϊ7 m/s2�������ܶȦ���0~60��/km֮��ȡֵ���仯����Ϊ5��/km����������Rȡ0.05��0.50���ֱ��������ռ�Ⱥ�С�Ϳ��������������2�ֵ���������ԶԱȽ�ͨ���ı仯����������pȡ0.2����������ȡ0.8��
ģ��ʵ�����VC++���ʵ�֣����������ٶȡ������������ֲ���������ͻ�ȷ��棬�������塢���������͵ȽǶȶ�ģ��ʵ�������з�����
4.1 ����
������-�ܶ�������ͼ1��ʾ����ͼ1(a)�ɼ�����R=0.05ʱ�����ֹ����µ��ٽ��ܶȻ�����ͬ���ڵ��ܶ������ܶ���������Ҳ��ͬ�������ܶ������Գƹ����������С��������������������ܶ�����벿��(10���ѣ�20 ��/km)��ͬ�������ܶ����Ұ벿��(20���ѣ�30)���ڲ��죬��ʱ���Գƹ�����������ͼ1(b)�ɼ�����R=0.50ʱ�����ֹ����µ�������ͬ������ͬ�ܶ��£����ֹ�����R=0.50ʱ��Ӧ�����������Ա�R=0.05ʱ��С��
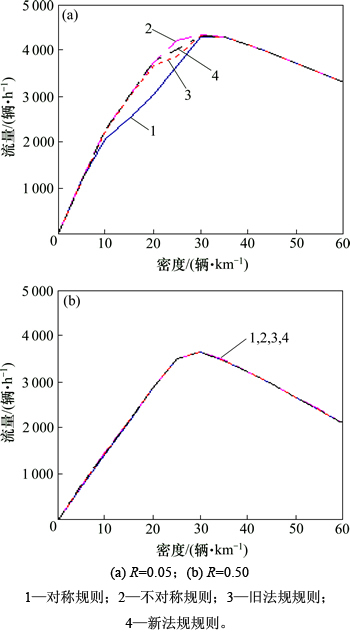
ͼ1 ������-�ܶ�����
Fig. 1 Total flow rate-density curves
R=0.05ʱ����������-�ܶ�������ͼ2��ʾ����ͼ2�ɼ�����R=0.05ʱ�����ֹ����ڸ��ܶ����ij�������������ͬ�����е��ܶ����ij����������ڽϴ��𣺶��������������Գƹ��������·������Ĵ�֮�������ҳ����������ɷ����������ʵ������������R=0.50ʱ�����ֹ����µij�����������С��
4.2 �ٶ�
�쳵�ٶ�-�ܶ�������ͼ3��ʾ����ͼ3�ɼ������е��ܶ������Գƹ����¿쳵�ٶ����Ա���������ĵͣ���R=0.05ʱ���������������ܶ�������������R=0.50ʱ�����������ڵ��ܶ��������������������Ӧ�Ŀ쳵�ٶ�ֻ��R=0.05�����ܶ�������С���죻����ͬ�ܶ��£����ֹ�����R=0.50ʱ��Ӧ�Ŀ쳵�ٶȶ����Ա�R=0.05ʱ�ĵ͡�ʵ���������������ٶ��ܻ��������Ӱ���С��

ͼ2 ����������-�ܶ�����(R=0.05)
Fig. 2 Flow rate of each lane-density curves (R=0.05)
4.3 ����
���û�������������������ͳ���������䶨��Ϊ����ƽ������������ͳ��ʱ���ı�ֵ���ܻ�����-�ܶ�����ͼ4����ͼ4�ɼ������е��ܶ������ܻ����ʴӴ���С����Ϊ�ɷ�������Գƹ����·�����Գƹ����ֹ����»��������ܶȵı仯���ƻ���һ�£���R=0.05ʱ���ܻ��������е��ܶȷֽ紦(��=10 ��/km)�ﵽ���ֵ����R=0.50ʱ���ܻ����������ܶ��������С��ʵ������������R=0.05ʱ���쳵������ͼ4(a)��ʾ�Ļ���һ�£����������ٻ�����R=0.50ʱ�����ͻ��� ��-�ܶ�����ͼ5����ͼ5(a)�ɼ�����R=0.50ʱ�����ֹ����¿쳵������һֱ�����ܶ��������С�����е��ܶ������쳵�����ʴӴ���С����Ϊ�ɷ�������Գƹ��Գƹ����·������ͼ5(b)�ɼ�����R=0.50ʱ�������ܶ������ֹ�����������������������С���Գƹ����������������С������������Ļ�����ͬ��

ͼ3 �쳵�ٶ�-�ܶ�����
Fig. 3 Speed of car-density curves
4.4 �����ֲ�
���ó���ʹ�������������ֲ���ͳ���������䶨��Ϊ����ʹ��ij������ƽ��ʱ����ͳ��ʱ���ı�ֵ���쳵���ҳ���ʹ����-�ܶ�������ͼ6��ʾ����ͼ6�ɼ����쳵���ҳ���ʹ�����ڶԳƹ����±�����50%���ң���R=0.05���е��ܶ�����R=0.50�ĵ��ܶ�����ʹ���ʴӴ���С����Ϊ�ɷ�����Գƹ����·�������Գƹ����������ҳ���ʹ����-�ܶ�������ͼ7��ʾ����ͼ7�ɼ����������ҳ���ʹ�����ڶԳƹ����±�����50%���ң�������������ʼ�մ���50%�����е��ܶ��������������ʹ����û�в��죻��R=0.05ʱ���ѣ�20 ��/kmʱ���������ʹ���ʶ��ӽ�100%��ֱ���ѣ�20 ��/kmʱ���½�����R=0.50ʱ�����������ʹ����һֱ�����ܶ��������С������ͬ�ܶ��µ�ʹ�������Ա�R=0.05ʱ�ĵ͡�
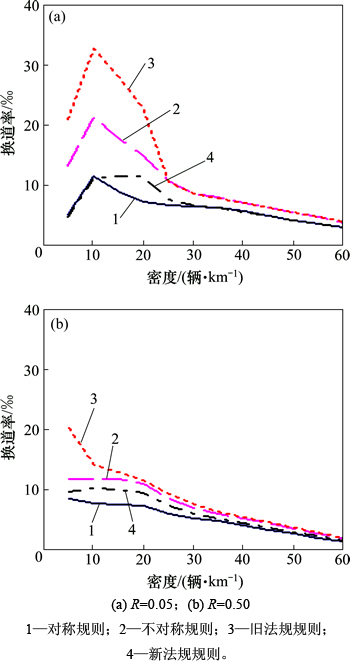
ͼ4 �ܻ�����-�ܶ�����
Fig. 4 Total lane changing rate-density curves
4.5 ������ͻ
���ó�ͻ������ǰ�������ͻ��ͳ���������䶨��Ϊ����ƽ����ɲ��������ͳ��ʱ���ı�ֵ���������ٶȴ�������������ٶ���Ϊ��ɲ�����쳵��ͻ��-�ܶ�������ͼ8��ʾ����ͼ8�ɼ������Գƹ����⣬��������Ŀ쳵��ͻ�ʲ����С����R=0.05ʱ�����е��ܶ������Գƹ����µĿ쳵��ͻ�����Ա���������ĸߡ�ʵ����������������ͻ���ܻ��������Ӱ���С��

ͼ5 �����ͻ�����-�ܶ�����(R=0.50)
Fig. 5 Lane changing rate of each vehicle type-density curves (R=0.50)

ͼ6 �쳵���ҳ���ʹ����-�ܶ�����
Fig. 6 Right lane usage rate of car-density curves

ͼ7 �������ҳ���ʹ����-�ܶ�����
Fig. 7 Right lane usage rate of truck-density curves
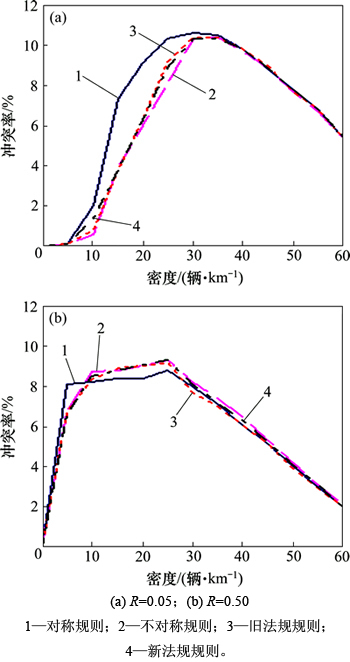
ͼ8 �쳵��ͻ��-�ܶ�����
Fig. 8 Conflict rate of car-density curves
5 ����
1) ���ݳ������ܺ�ʹ��Ȩ�����ٹ�·���������Ϊ�Գơ����Գơ��ɷ�����·���4�ࡣ���ݻ���������������Ϊ�������ͺ��������ͣ�����Ԫ���Զ�������������2�ֻ����ij���������Դ�Ϊ�����ܹ�ͳһ����������4�������ģʱ�����˿쳵�������ڳ��ȡ�����ٶȺ������ٶȵȷ���IJ��죬���ӷ����ҹ����ٹ�·ʵ�������
2) �ٽ��ܶȺ������ٶȶ��뻻�������ء���ͬ����������ɵIJ��������ܶȺ��������ʵ��������С�����������ʽ�Сʱ���е��ܶ�������Գƹ�����ȣ�����3�ֹ���ͨ�������ı䳵���ֲ����ɴ���ȼ��ٳ�ͻ����߿쳵�ٶȡ�����3�ֹ����¿쳵�ٶȽ����������ʽ�С�ҿ����ٽ��ܶȵ����ܶ������ڲ��졣�����������⣬���ֹ�������Ȼ�����ͳ����ֲ���ͬ�����쳵�ٶȴ�����ͬ��
3) ���Ķ����������ζ�������ͬ���������ʺͻ������ʣ���ʵ������ֵ�������Ż��������͡�������ǰ������Ϻͽ�ͨ״̬�ı仯�������仯�����⣬��������ʻ�����л������õ�����������Ϊ����Щ�����д��ڽ�һ���о���
[1] ��ΰ, ������, ���̻�. ��ͨ��������ģ������[J]. ��ͨ����ϵͳ��������Ϣ, 2012, 12(3): 90-97.
GUAN Wei, HE Shuyan, MA Jihui. Review on traffic flow phenomena and theory[J]. Journal of Transportation Systems Engineering and Information Technology, 2012, 12(3): 90-97.
[2] ����, ���ٷ�. �����ٶ�ģ����Ԫ���Զ���ģ�͵ıȽ��о�[J]. ����ѧ��, 2010, 59(2): 832-841.
JIA Ning, MA Shoufeng. Comparison between the optimal velocity model and the Nagel-Schreckenberg model[J]. Acta Physica Sinica, 2010, 59(2): 832-841.
[3] ���, ��ʢ. ����������Ϊ��ģ�Ļع���չ��[J]. �й���·ѧ��, 2012, 25(1): 115-127.
WANG Dianhai, JIN Sheng. Review and outlook of modeling of car following behavior[J]. China Journal of Highway and Transport, 2012, 25(1): 115-127.
[4] WOLFRAM S. Statistical mechanics of cellular automata[J]. Reviews of Modern Physics, 1983, 55(3): 601-644.
[5] NAGEL K, SCHRECKENBERG M. A cellular automaton model for freeway traffic[J]. Journal of Physics, 1992, 2(12): 2221-2229.
[6] CHOWDHURY D, SANTEN L, SCHADSCHNEIDER A. Statistical physics of vehicular traffic and some related systems[J]. Physics Reports, 2000, 329(4): 199-329.
[7] MAERIVOET S, DE MOOR B. Cellular automata models of road traffic[J]. Physics Reports, 2005, 419(1): 1-64.
[8] RICKERT M, NAGEL K, SCHRECKENBERG M, et al. Two lane traffic simulations using cellular automata[J]. Physica A: Statistical Mechanics and Its Applications, 1996, 231(4): 534-550.
[9] CHOWDHURY D, WOLF D E, SCHRECKENBERG M. Particle hopping models for two-lane traffic with two kinds of vehicles: Effects of lane-changing rules[J]. Physica A: Statistical Mechanics and Its Applications, 1997, 235(3): 417-439.
[10] NAGEL K, WOLF D E, WAGNER P, et al. Two-lane traffic rules for cellular automata: a systematic approach[J]. Physical Review E, 1998, 58(2): 1425-1437.
[11] JIA Bin, JIANG Rui, WU Qingsong, et al. Honk effect in the two-lane cellular automaton model for traffic flow[J]. Physica A: Statistical Mechanics and Its Applications, 2005, 348(3): 544-552.
[12] LI Xingang, JIA Bin, GAO Ziyou, et al. A realistic two-lane cellular automata traffic model considering aggressive lane-changing behavior of fast vehicle[J]. Physica A: Statistical Mechanics and Its Applications, 2006, 367(C): 479-486.
[13] ʷ��, ������, ���ҷ�, ��. ����Ԫ���Զ�����˫����������ͨ�������о�[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(4): 1616-1622.
SHI Feng, ZHOU Wenliang, LIU Fenfang, et al. Two-lane roundabout traffic flow characteristics based on cellular automaton[J]. Journal of Central South University (Science and Technology), 2010, 41(4): 1616-1622.
[14] ZHU H B, ZHANG N X, WU W J. A modified two-lane traffic model considering drivers�� personality[J]. Physica A: Statistical Mechanics and Its Applications, 2015, 428(C): 359-367.
[15] �����, ����ǿ, ���ǿ, ��. ���ٹ�·��ʻ�����µļ�ʻԱ��������[J]. �廪��ѧѧ��(��Ȼ��ѧ��), 2013, 53(10): 1481-1485.
DANG Ruina, WANG Jianqiang, LI Keqiang, et al. Driver lane change characteristics for various highway driving conditions[J]. Journal of Tsinghua University (Science & Technology), 2013, 53(10): 1481-1485.
[16] ���о�, ���, �, ��. �ij������ٹ�·���ۻ���ģ�����������[J]. �й���·ѧ��, 2014, 27(12): 96-105.
LIU Youjun, LI Ke, YU Jun, et al. Car-following and lane-changing modeling and parametric excitation on four-lane expressway[J]. China Journal of Highway and Transport, 2014, 27(12): 96-105.
[17] ��, ���ٹ�, л��. ���ڹ�·�����ٶ���Ƶı����ͷ����[J]. �й���·ѧ��, 2010, 23(S1): 13-18.
CHAI Hua, ZHOU Ronggui, XIE Jun. Standard vehicle type classification criteria based on highway operating speed design[J]. China Journal of Highway and Transport, 2010, 23(S1): 13-18.
[18] ����, ����, �����, ��. ���²�����Ԫ���ߴ��Ԫ���Զ���ģ�͵�Ӱ��[J]. ���ִ�ѧѧ��(��ѧ��), 2013, 43(2): 310-316.
JING Ming, DENG Wei, JI Yanjie, et al. Influences of time step and cell size on cellular automaton model[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(2): 310-316.
(�༭ �²ӻ�)
�ո����ڣ�2015-06-31�������ڣ�2015-08-22
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51338002��51208064)����ɳ������ѧ��·���̽������ص�ʵ���ҿ��Ż���������Ŀ(KFJ130101)������ʡ��ͨ���Ƽ���Ŀ(2013C0008) (Projects(51338002, 51208064) supported by the National Natural Science Foundation of China; Project(KFJ130101) supported by the Open Fund of the Key Laboratory of Highway Engineering of Changsha University of Science & Technology, Ministry of Education; Project(2013C0008) supported by Transport Department of Jiangxi Province)
ͨ�����ߣ���������ʿ����ʦ�����½�ͨ����·����CAD�о���E-mail��yangliuemail@163.com
ժҪ�����ݳ������ܺ�ʹ��Ȩ���ij������ٹ�·���������Ϊ�Գơ����Գơ��ɷ�����·���4�࣬���ݻ���������������Ϊ�������ͺ��������ͺ�ͳһ����������4����������Ӧ��Ԫ���Զ���ģ�ͣ���VC++���ʵ��Ԫ���Զ���ģ�⣬���ǿ쳵(С�ͳ�)������(�����)�ij��ȡ�����ٶȺ������ٶȲ��졣�о�����������ٽ��ܶȺ������ٶȶ��뻻�������أ���ͬ����������ɵIJ��������ܶȺ��������ʵ��������С�����������ʽ�С���е��ܶ�������Գƹ�����ȣ�����3�ֹ���ͨ�������ı䳵���ֲ����ɴ���ȼ��ٳ�ͻ����߿쳵�ٶȣ�����3�ֹ����¿쳵�ٶȽ����������ʽ�С�ҿ����ٽ��ܶȵ����ܶ������ڲ��졣
[1] ��ΰ, ������, ���̻�. ��ͨ��������ģ������[J]. ��ͨ����ϵͳ��������Ϣ, 2012, 12(3): 90-97.
[2] ����, ���ٷ�. �����ٶ�ģ����Ԫ���Զ���ģ�͵ıȽ��о�[J]. ����ѧ��, 2010, 59(2): 832-841.
[3] ���, ��ʢ. ����������Ϊ��ģ�Ļع���չ��[J]. �й���·ѧ��, 2012, 25(1): 115-127.
[16] ���о�, ���, �, ��. �ij������ٹ�·���ۻ���ģ�����������[J]. �й���·ѧ��, 2014, 27(12): 96-105.
[17] ��, ���ٹ�, л��. ���ڹ�·�����ٶ���Ƶı����ͷ����[J]. �й���·ѧ��, 2010, 23(S1): 13-18.
