
DOI�� 10.11817/j.issn.1672-7207.2020.09.012
�������ֱ�����ε�г�������ռ乲�������������
��ɺ�1����ѩ��1���γ�ʡ1����ų�1������2���ε���2
(1. �����ѧ ��е���������ص�ʵ���ң����죬400044��
2. �����д��徫�ܴ����Ƽ�����˾���㶫 ���ڣ�518057)
ժ Ҫ��
���ֲ�������г������������֮�临�ӿռ���εķ������÷�������ֱĸ�ٶ��������ֿռ���δ������������߱仯�����ֳݿռ䷽λ�仯�����شг�������˶�ѧģ�͡�����Բ��Ϊ����������ֵ���������ֿռ乲��������о����ֱ���ռ�����������Ŀռ�ת�Ǽ�������Ϲ����еĹ����������ֳ��˶��켣�ͳ������ϼ��ߴ���������Ӱ�졣�о�������������ֳݿռ䷽λת�Dz��ɺ��ӣ���������λ�������ת�DZ仯���Ӿ��ң��������ֳ�������������������Ȧ���������������Ҵ����������ϣ����ϽӴ�״�����š�
�ؼ��ʣ�
�ռ乲�����ռ������г��������˫Բ������Բ����
��ͼ����ţ�TH132.43 ���ױ�־�룺A
���±�ţ�1672-7207��2020��09-2471-09
Design and analysis of space conjugate tooth profile of harmonic drive considering deformation of flexspline cup
ZHU��Feihong1, DU��Xuesong1, SONG��Chaosheng1, ZHU��Caichao1, YANG��Yong2, LIAO��Delin2
(1. State Key Laboratory of Mechanical Transmissions, Chongqing University, Chongqing 400044, China;
2. Shenzhen Han's Motion Technology Co. Ltd., Shenzhen 518057, China)
Abstract: A method for accurately describing the complex space deformation between circular spline(CS) and flexspline(FS) of harmonic drive(HD) with a cam wave generator was proposed. The method was based on the assumption of the straight bus, considering the variation of the mid-surface curve caused by the deformation of the FS and the spatial orientation change of the FS teeth, and the kinematics model of the HD was built. Taking the elliptical cam as an example, the space conjugate tooth profile of the FS was calculated by numerical method. The space rotation angle generated by the deformation of the flexspline cup and its conjugate area, the relative movement trail of FS and the contact path on FS tooth surface during the meshing process were studied. The results show that the azimuth rotation angle of the FS tooth considered in this paper cannot be ignored, and the change of the rotation angle caused by the tangential displacement is more severe. The conjugated region obtained is significantly increased, and the cross-section of the FS has no interference and has two-point meshing, and the meshing contact condition is better.
Key words: space conjugate; space tooth profile; harmonic drive; double-circular-arc tooth profile; elliptical cam
г�����ִ������нṹ���ա����ٱȴ������ȸߵ��ŵ㣬�㷺Ӧ���ں��պ��졢����ͨ�ź�ҵ�����˵�������г�������У����ַ����ĵ����ȱ��ξ��пռ������������ǹ�ҵ��������ʹ�õĶ�Ͳг�������������и����ԵĿռ���Σ���ˣ�Ҫ������õ��������ԣ������������谴�ռ乲�����������ơ�Ŀǰ��г������������ƶ���ƽ�湲����δ���ռ������������Ȼ�����˿ռ������Ƶ������˽϶���裬������Ƶij��ν��ᵼ�½϶�����ϸ���ͼ�����ϣ��Ӷ����������ڴ����ij���ĥ����ˣ��б�Ҫ�������ֿռ��ȱ��ν�������ȷ��г�������˶�ѧģ�ͣ���չ���ֿռ乲���������о���������ѧ�߶�г�������ṹ��Ʒ���[1-5]���������ۼ��˶�ѧ[6-7]�������о�[8-10]����϶���������ֲ�[11-12]����̬���ܺͿ���[13]������չ�˴����о�����г���������������ƺ���ⷽ�棬���µ�[14]����˾�ȷ����Բ�ֲ�������ƽ��г�������˶�ѧ������Ϊ���϶г������ƽ�湲�����������ṩ��˼·��DONG��[7]����˿��������ȱ��ε�г�������˶�ѧģ�ͣ�ָ���������ֵĿռ���Σ������ֹ������֮һ�����ǿռ����������ᵼ�²���Ҫ�ĸ���ͱ��Σ���ΰ����[15-16]������þ�����б�Ƕȵĸ��ֳ���������ռ��ȱ��ε��������ϣ���ͨ��ʵ����֤�÷��������г���������Ĵ����նȣ���û�п��������ֲ��ÿռ�����������ӹ�ʱ�Ĺ��������⣻���˻Ե�[17]���������ȱ�������������ָ������������ߵIJ��죬�����ֿռ���������ת��Ϊ���������ڵ�ƽ�������ƣ��÷������ֲ���ƽ����Σ�����Ϊ�ռ乲��������������[18-19]�����ֳ�Ȧ��ɢ�����������棬ͨ���������ڸ��������ֳ����ľ���λ����ƾ�����ǵ����ֿռ����������ϼ[20]����ֱĸ�ٶ���ȷ�ط��������ֿռ��ȱ�������������δ�������˶�ѧģ�����ռ乲����������������������о����������ֳ���������ɢ��һϵ�н�������ƹ������������ѧ�߿����������ȱ�����ɵĸ������������ߵIJ��죬�����������ֱ���Ŀռ���λ����������ֳݵĿռ�ת�������κ�����ֳݺ���潫���ٴ�ֱ����ת�ᡣ�������߿������ֿռ���δ������������߱仯�����ֳݿռ䷽λ�仯����������ȷ��г�������˶�ѧģ�ͣ�������ֵ��������ֿռ乲��������о����ֱ���ռ�����������Ŀռ�ת�ǣ��Լ���ת�Ƕ����Ϲ����еĹ����������ֳ��˶��켣�ͳ������ϼ��ߴ���������Ӱ�죬�Ա�Ϊ�߾���г�����ִ�����������������Ż��ṩָ����
1 �����ռ乲���˶�ѧģ��
г�������У����ֱ���ȡ���ڲ�������������״����������״������������״��������Ӱ�챭����Σ��������ֳݼ��غɷֲ���ȡ�����ֳݳ��Σ����Ҫ�����غ�ʩ�Ӷ����ֱ��δ�����Ӱ�죬��Ҫ���Ƚ�������״̬�µ��ֳݼ���������Ȼ������غɣ������������Ӱ�죬�Դ���Ϊ�����������ݡ��ʱ�������������״̬�½����������ֿ�������ռ���ε��˶�ѧģ�ͣ���Ҫ��������[20]��
1) ��������������Բ����������棻����������������������������Ľ��ߣ�
2) ���ֱ��忴���½�������˸��Ա���Բ���ܱߵ�Բ���ǣ����ֳݿ������壬��ֱĸ���Ʊ��½ӵ㷢���ɾ���λ��w������λ��v�����2��ת����
3) ���ֱ�����κ������������������ƽ��Բ��Ϊ�ռ����ߣ��������ɾ������������λ��ȷ������������λ����Ϊ���������߱��κ�����ͬһƽ�档
�Ը��̶ֹ�������������ʱ����ת���롢����˳ʱ����ת�����г������Ϊ�о����������ֱ�����Σ�������ͼ1��ʾ����ϵͳ�������������֡����ֺͲ�������֮�������˶�������������ѡ�����λ�ƺͿռ�ת�ǡ����У��Ը��ֻ�ת����O2Ϊԭ�㽨�����̶ֹ�����ϵS2{O-X2Y2Z2}���Բ���������ת����OΪԭ�㽨����������������ϵS{O-XYZ}��X��Ϊ�����������ᡣ���ֳݶ�����ϵΪS1{O1-X1Y1Z1}��X1��Ϊ�����ֳݶԳ��ߣ�ԭ��ΪX1�����������Բ㽻�㡣Ϊȷ���������ڲ������������µĿռ����������������������ϵSa��Sb��Sc���������ι���������λ��v������λ��w�Լ�����ת�Ǧ̴����������᷽λ�仯���ڳ�ʼλ�ã�X1��X2��X���Ṳ�ߣ�����ϵS��S2�غϣ�����ϵS1��O1��λ�ڲ����������ᶥ�㡣ͼ1����ʾλ��Ϊ�������������X2����ʱ����ת��2ʱ�����ַDZ��ζ������X2��˳ʱ����ת���������ζ���˳ʱ����ת�á�ͼ1�У���Ϊ���������������������˵�ת�ǡ�
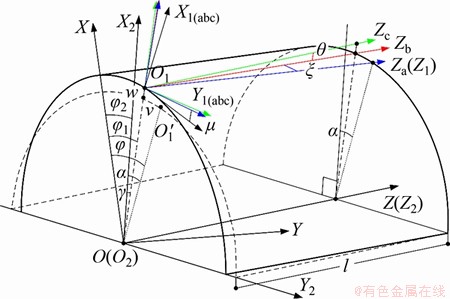
ͼ1��г����������ϵ
Fig. 1��Coordinate systems of HD
����������ʹ�������淢���ȱ��Σ��ñ��ι����е�λ���ƶ��������᷽λ�仯�ɸ�������ϵSa��Sb��Sc�Լ�����ϵS1֮���ƽ�ƺ�����ת����������1) ���ֱ���ʹ�����϶�O1��������������λ�ƴ�ͼ1��O1�䴦�ƶ���O1������Ӧ��������ϵSc��Xc����OO1����Zc��ƽ���ڲ���������ת��Z��(ͼ2(a))��2) �ɾ���λ��w������Yc���ת�Ǧȣ���������ϵSc��ת������ϵSb(ͼ2(b))��3) ������λ��v����������ϵSb��Xc���ת�Ǧ� (Xc���Sb����ϵ��������)����������ϵSb��ת������ϵSa(ͼ2(c))��4) �����ֱ���������Za���ת��λ�Ʀ̣���������ϵSa��ת������ϵS1(ͼ2(d))��
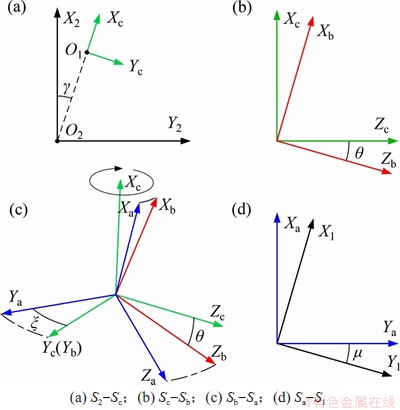
ͼ2��г��������������ϵ
Fig. 2��Auxiliary coordinate systems of harmonic drive
Ϊ�������ֿռ�����������ֳݵķ�λ�仯�����Ķ������ɾ���λ��w������Yc���ת�ǦȺ�������λ��v������Xc���ת�ǦΣ���2���ռ�ת�Ƕ����ֳݿռ䷽λ�仯���������������˶�����ѡ���Ԧ�1Ϊ�Ա�����ʾ��������Բ�ڶ�ƫ���ʦţ������Ƴ�2���ռ�ת�ǵļ��㹫ʽ����Ԧ�1������ʽ���£�



ʽ�У�rmΪ����δ����ʱ���Բ�뾶����Ϊ����ϵ����l��ʾ����������������룻aΪ�������Բ���Բ���bΪ�������Բ���Բ���ZfΪ���ֳ�����ZcΪ���ֳ�����
������ʽ�еļ���OO1����r��ת��λ�Ʀ̡�����������������������ת�Ǧա�������������ڸ���ת�Ǧ�2���������϶���ת�ǶȦõļ���ʽ����Ԧ�1������ʽ�μ�����[14]��
2 �������
ͼ1��ͼ2��ʾ������ϵS2��S1������任�������£�

����


ͬ���õ�ʸ�任����W12�����ݳ�������ԭ�����������ڽӴ��㴦���������������Ϸ��̣�

ʽ�У�niΪ�Ӵ���ĵ�λ����ʸ��vi(12)Ϊ�Ӵ��������˶��ٶ�ʸ����
��S1����ϵ�п���ʽ(6)������


�����ֳ������߱�ʾΪ�Ի���sΪ�����ķ��̣����ڳ���������ÿһ�㣬����Ӧ1������ֵsi����ÿһ������si(i=1��2������s)����Ӧ�������ߵ��ʸ��r2�ͷ�����n2����ʽ(7)���ó��õ㷢�������˶�ʱ�ĽǦ�1����Ϊ��1i(i=1��2������s)������ÿ����1iȷ����ӦM12�и�Ԫ��ֵ���ó���Ӧ������任����M12i��������ʽ�����ɵó�����ֳ���������������۳�����

3 ʵ������
��1��˫Բ��г��������Ϊ������������Ϊ����Բ�֣������ֳ�����ϵ������ʽ˫Բ�����ֳ�����ͼ3��ʾ���ü��������ֳ���Zf=160�����ֳ���Zc=162��ģ��m=0.4���ݿ�B=12 mm�����������������ϵ����0=1.0��ȫ�ݸ�h=1.7m=0.68 mm���ݶ���ha=0.8m=0.32 mm���ݸ���hf=0.9m=0.36 mm�����ֳ�Ȧ�ϳ�����������������ľ���l=20 mm�����־���������1��ʾ��
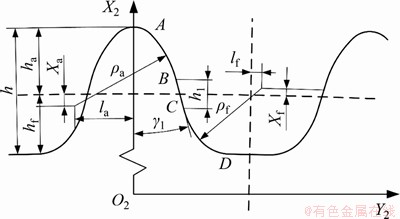
ͼ3������˫Բ����������������ϵ
Fig. 3��DCTP and coordinate of a circular spline tooth
��1�����ֳ�������
Table 1��Circular spline tooth profile parameters

�ڸ�������ϵS2�У����ֳ�Ȧ�������ò�ͬ��Z����ֵzi������������ֱĸ������κ����ָ�����ľ������ϵ����i(i=1��2������c)������ʽ��������

ʽ�У�lΪ����������������룻ziΪ��������ϵ�и���������ֵ����0Ϊ���������������ϵ����
ʽ(9)��cΪ���ֳ�Ȧ������ѡȡ�Ľ���ĸ�����zi��[2��-10]�������ֳ�Ȧ����������ת�����Ϊ25�����������ʾ(c=25)���ӵ�1����25�������ֱ��Ӧz=2��1.5��1������-10����������������z=0��
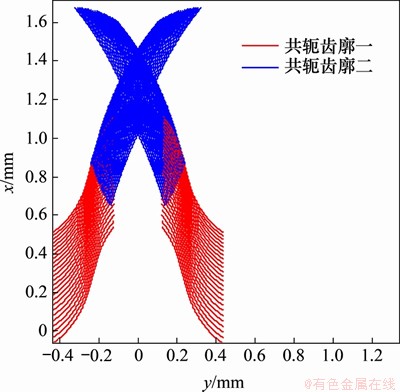
�������е�����һ�����棬�������ϵ����i����ʽ(9)��ã��ռ�ת�ǦȺͦ��Լ����ǶԦ�1�ĵ�������ʽ(1)~(4)��ã����Ի�����ʾ�ĸ��ֳ�����һϵ�г������ߵ�����Ӧ��ʸ��r2�ͷ�����n2����ʽ(7)���ó��õ㷢�������˶�ʱ�����ֳ�����ԭ���ʸ��OO1�벨����������X���ļнǦ�1���������ֳ��������25�����������Ħ�1���ɸó���Ĺ���������������2������ɷֱ��Ϊ��������һ�������������ͼ4��ʾ��
ͼ4���ռ������������Ƚ�
Fig. 4��Comparison of conjugate existent domain of spatial tooth profiles
ͼ4�мӴ����߲��ֱ�ʾû�п������ֿռ��ȱ��ε�ƽ��г���������������ı������ֳ��ζ�Ӧ��2�������������к�ɫ���߱�ʾ��������һ����ɫ���߱�ʾ�������������ͼ4�ɵ�ƽ��г���������������Ĺ�������һ�Ƕ�����Ϊ[-0.461 8�㣬4.923��]������������Ƕ�����Ϊ[24.92�㣬71.66��]�����ɱ��ĵ��㷨��õĿռ������������һ�Ͷ������ǵĽǶ�����Ϊ[-0.473 8�㣬11.44��]��[20.60�㣬79.94��]�����ƽ��г���������۱����㷨��������һ����С�Ƕ�ƫ���������Ƕ�ƫ�����ֱ�Ϊ0.012���6.517�㣬����������ĽǶ�ƫ�����ֱ�Ϊ4.326���8.287�㡣��ƫ�ƽǶȺ��������С֮����Ϊ����������չ�����������������ڹ�������һ����С�Ƕ���չ����С��Ϊ0.222 8%�����Ƕ���չ��Ϊԭ���������1.21�����ڹ������������С�Ƕ���չ��Ϊ9.255%�����Ƕ���չ��Ϊ17.73%������������õ��Ĺ�������ܹ�������һӰ��ϴ����Ϸ������������㷨�������ù�������һ��ƽ��г���������۵�2.21�������������˳��εĹ�������ʹ���빲�����ϵ��ֳ���Ŀ���࣬�����˫Բ��г���������������Ⱥ�Ťת�նȡ������ֳ�ĥ����߱��������������ش�
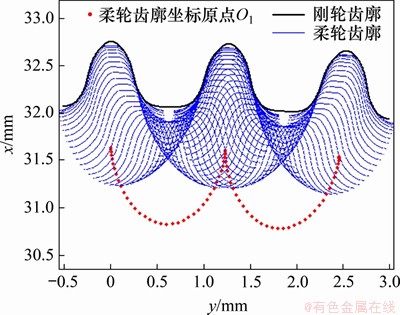
��ʽ(8)�д����ɹ���������õ�����任����M12i�����ɵó�����ֳ���������������۳��������ڴ���2������������ÿ�����涼��Ӧ��2�����ֳ�����ͼ5��ʾΪ��ƽ���������ֳ��ι�������ֳ�����2����������뻥�����棬��������ֻ��1���ǿ��еġ�ͼ�к�ɫ���ֳ�����ƽ��г���������۹�������һ��Ӧ��ѡ��ó���Ϊ���г�������ɫ�������������ֳ���Զ���ֳ������������õ��ģ��ó������߱����������ཻ���۵������������ֳ�����ϵS1�г���x����ϴ�ֱ����Ϊ���ֳ��������½ϴ�����ϸ��档
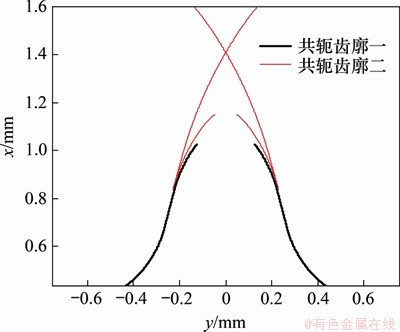
ͼ5������ƽ�湲�����
Fig. 5��Flat flexspline conjugated tooth profiles
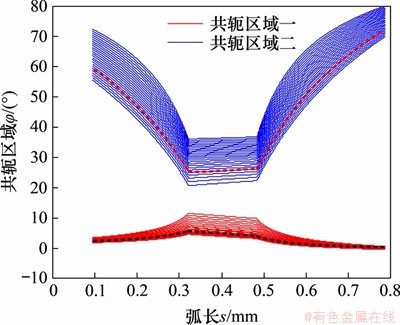
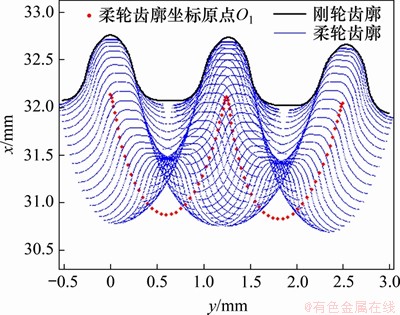
��ˣ����ڸ��ֳ�Ȧÿ�����棬�����Բ�����ͬ�ķ����õ���֮��������ֳ���(��ͼ6��ʾ)��ͬ���أ�ȡ�빲������һ���Ӧ�ĺ�ɫ������Ϊ���ֵĿռ������ͼ7��ʾΪ�ù������������ͼ���ɱ���ģ�͵õ��ĸ��������ֿռ乲��������������˲�ͬ�����������ߵı仯�����ҿ����˳�����������ƽ�淢���Ŀռ�ת����ת���Ƕ��ɱ��ĵľ�ȷ�ռ乲���㷨���м��㡣
ͼ6�����ֿռ乲�����
Fig. 6��Spatial flexspline conjugated tooth profiles
ͼ7�����ֿռ乲�����
Fig. 7��Spatial flexspline conjugated tooth profiles
���Ų���������ת�������ֱ��ι����г�Ȧ���������ֳݲ����Ŀռ�ת�DZ仯���߷ֱ���ͼ8��ͼ9��ʾ�����У�ͼ8��ʾΪ�ռ�ת�Ǧ��漫�Ǧ�1�ı仯���ɣ�ͼ9��ʾΪ�ռ�ת�Ǧ��漫�Ǧ�1�ı仯���ɣ��Ⱥͦ����Ƕȵı仯����Ϊ�У��ò�ͬ����ɫ����������ʾ���ֳ�Ȧ��Z���������Ŀռ�ת�DZ仯���ɣ�ÿ������֮���z����֮��Ϊ2 mm��ͼ8��ͼ9�У���ɫ���߱�ʾ��ƽ��棬��ɫ���߱�ʾ�������ڶ�����Ȧ���棬��ɫʵ�߱�ʾ����������ڲ���档��ͼ8��ͼ9�ɼ����ռ�ת�ǦȲ�����ֵ�ϴ仯���߹���180����Գƣ���ֵΪ1.083�㣬��n����/2�����ּ�ֵ�����ֵ�����ڿ��ڶ˦�max=1.228�㣬�����ƽ��漫ֵ������7.16%����ȿ���������ڲ���漫ֵ������8.29%������λ��v�����ת�Ǧη�ֵ��С���������߹���180���ᷴ�Գƣ���ֵΪ0�㣬��(2n+1)����/4�����ּ�ֵ�����ֵ�����ڿ��ڶ˦�max=0.864 4�㣬�����ƽ��漫ֵ������1.5������ȿ���������ڲ���漫ֵ������1.67�������ֳ�Ȧ��������2���ռ�ǶȾ������˽ϴ�ı仯����ȿռ�ת�Ǧȣ�ת�Ǧα仯���Ӿ��ҡ������߱仯����������[20]�о���λ��w������λ��v�ı仯�������Ǻϡ�
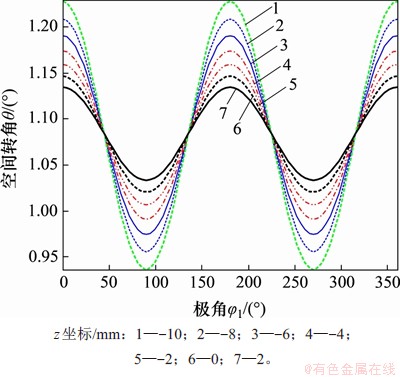
ͼ8�����ֳ�Ȧ������Ƚ�λ������
Fig. 8��Node angular displacement �� on each section of flexspline
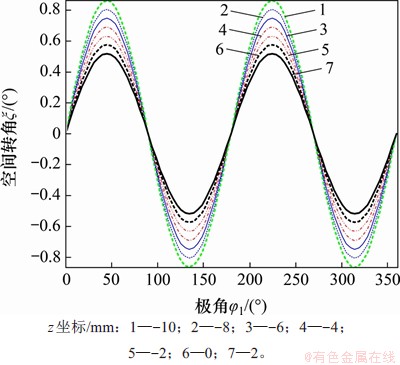
ͼ9�����ֳ�Ȧ������ν�λ������
Fig. 9��Node angular displacement �� on each section of flexspline
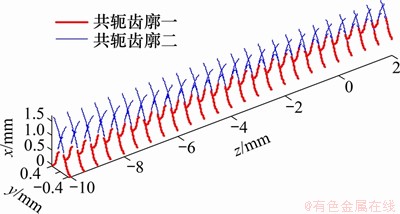
���Ų���������ת����ͨ��ѭ�����Ӳ���������ת�ǣ��Ը��������ֳ���������������任���������ֳݺ��ֳݵ�����˶�״̬���ڲ���������ת0��~360��Ĺ����У����ڱ�������Ŀռ乲���˶�ѧģ�͵������ֳ�����ڸ��ֳݲ۵��˶��켣��ͼ10~12��ʾ��ͼ10��12�к�ɫ���߱�ʾ���ֳ�����ϵԭ��O1���˶��켣��XYƽ���ͶӰ������������ת1Ȧ������ת��2���ݡ���ͼ10~12��֪������Ȧ����ĸ��������Ϲ켣��δ�������棬����౭�����������������ֳ������˶��켣�ı�����Ҳ������ʵ����������
ͼ10��Z=2�������ֳ��˶��켣
Fig. 10��Relative movement trail of Z=2 section
ͼ11��Z=0�������ֳ��˶��켣
Fig. 11��Relative movement trail of Z=0 section
ͼ12��Z=-10�������ֳ��˶��켣
Fig. 12��Relative movement trail of Z=-10 section
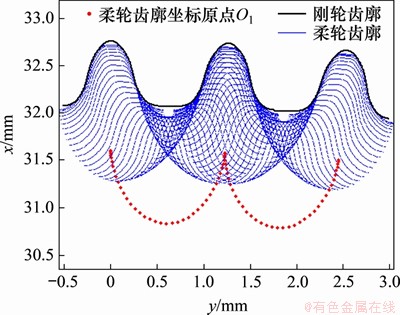
ͼ13��ʾΪ�������ֿռ�����ϵĽӴ����߷ֲ���������У����ݶ����ֵ�1���Լ��ݸ����ϵ�5�����Ϊ��ɫ���������������ֳ�����ԭ��ʸ��OO1�벨����������X���ļнǦ�1Ϊ2.291 8��ʱ�ա����ֳ���2��λ��ͬʱ�������ϽӴ��γɵģ���������Ϊ����Ӵ�����ͼ13���Կ���˫Բ��г�������ա����ֳݵ����ϴӿ����ݸ���λ�ÿ�ʼ���γ�ͼ13�Ц�1=0��ʱ�ĽӴ����ߣ��ݿ������г���60%�ij���������ϣ���ʱ��������������X���������ֳ�����ԭ��ʸ��OO1��ļн�Ϊ0�㣻���Ų���������ת�������ϼ��������ӳݸ�������չ�������ݿ�����ȫ���������ϣ�ֱ����1=2.291 8��ʱ�ݶ���Ҳ��ʼ�������ϽӴ��������ֳ������2���Ӵ����ߣ��γ�����Ӵ���������������ת��ʱ��2�����ϽӴ������ڳ����в����������պϳ�1���������سݿ������˳����ϣ�����1=10.886 2��ʱ��ȫ�˳����ϡ�ͼ13�����ϼ��߶�Ӧ�Ĺ�������Ϊ[0�㣬10.886 2��]���ù���������ǰ�汾���㷨����Ĺ�������һ[-0.473 8�㣬11.44��]���Ǻϣ���ƽ��г������������ȹ�����������
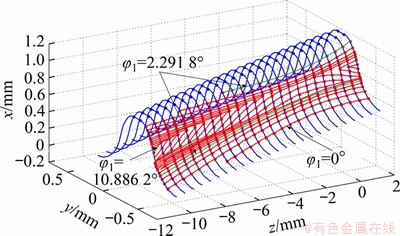
ͼ13�����ֳ������ϽӴ����߷ֲ�
Fig. 13��Contact path on flexspline tooth surface
4 ����
1) �������ֿռ���δ������������߱仯�����ֳݿռ䷽λ�仯�����أ����һ�־�ȷ����������֮�临�ӿռ��˶���ϵ���˶�ѧģ�ͣ��ܹ�����������ռ侫ȷ������������ÿռ�������и���Ĺ�����������������г�����������������ʹ�����������Ҫ���塣
2) ���ƽ��г���������ۣ������㷨������2������������������Թ��������������Ӱ��Ĺ�������һ��չ��1.21���������������չ��17.73%���и���ijݶԲ������ϣ��������ֳ������ϽӴ����߿ɾ�ȷ����˫Բ�������ڿռ乲������µ�����Ӵ�����
3) ���������ǵ����ֳ�Ȧ���������ɾ���λ�ƺ�����λ���������2���ռ�ת�ǦȺͦξ������˽ϴ�仯�����ɺ��ӣ����У���max=1.228�㣬����ƽ���Ħ�max�������8.29%����max=0.864 4�㣬����ƽ���Ħ�max�������167%�����ɾ���λ��w�����ת�Ǧ���ȣ�����λ��v�����ת�Ǧα仯���Ӿ��ҡ�
�ο����ף�
[1] ������. �������ֱ��κ�����г�����ִ����˶�����ѧ�������������о�[D]. ����: ����������ѧ��е����ѧԺ, 2008: 15-25.
DONG Huimin. Study of kinematics and meshing characteristic of harmonic gear drives based on the deformation function of the flexspline[D]. Dalian: Dalian University of Techonology. School of Mechanical Engineering, 2008: 15-25.
[2] ��Ԫѫ, ������. �������г���������ֱ��ε��о�[J]. �Ͼ�������ѧѧ��(��Ȼ��ѧ��), 1996, 20(1): 38-42.
FAN Yuanxun, WANG Huakun. Study on the deformation of flexspline in the engagement output harmonic drive[J]. Journal of Nanjing University of Science and Technology(Nature Science), 1996, 20(1): 38-42.
[3] ���ľ�, �����, ������. г�����ִ���С��������������ԪӦ������[J]. �������̴�ѧѧ��(��Ȼ��ѧ��), 2007, 25(4): 26-29.
WANG Wenjing, XIN Hongbing, XU Zhengxing. Finite element analysis of flexspline in harmonic gear drive[J]. Journal of Beijing Technology and Business University(Natural Science Edition), 2007, 25(4): 26-29.
[4] ������, ������, ������. г�����ִ���������Ӧ��������Ԫ����[J]. �й���е����, 2007, 18(18): 2210-2214.
FU Junfeng, DONG Haijun, SHEN Yunwen. Stress analysis of the flexspline in harmonic gearing by using FEM[J]. China Mechanical Engineering, 2007, 18(18): 2210-2214.
[5] XU L, QIN L, ZHU C. Displacements for an electromechanical integrated electrostatic harmonic drive[J]. The Journal of Strain Analysis for Engineering Design, 2006, 41(2): 101-111.
[6] �����. �о�г�����ִ�������ԭ����һ���·���[J]. �й���е����, 2002, 13(3): 181-183.
XIN Hongbing. A new method for research on engagement principle of harmonic drive[J]. China Mechanical Engineering, 2002, 13(3): 181-183.
[7] DONG Huimin, WANG Delun, TING K L. Kinematic effect of the compliant cup in harmonic drives[J]. Journal of Mechanical Design, 2011, 133(5): 051004.
[8] ISHIKAWA S, TAKIZAWA N. Wave gear drive having negative deflection meshing tooth profile: US, 7735396[P]. 2010-06-15.
[9] KAYABASI O, ERZINCANLI F. Shape optimization of tooth profile of a flexspline for a harmonic drive by finite element modelling[J]. Materials & Design, 2007, 28(2): 441-447.
[10] �����. ˫Բ��г�����ִ��������������[J]. �й���е����, 2011, 22(6): 656-662.
XIN Hongbing. Design for basic rack of harmonic drive with double-circular-arc tooth profile[J]. China Mechanical Engineering, 2011, 22(6): 656-662.
[11] ����. ���϶������г�����ִ����IJ����Ż���Ƽ�����Ԫ����[D]. �ػʵ�: ��ɽ��ѧ��е����ѧԺ, 2010: 33-60.
YIN Yan. Parameter optimization design and finite element analysis of zero-lateralspace involute harmonic gear driving[D]. Qinhuangdao: Yanshan University. School of Mechanical Engineering, 2010: 33-60.
[12] LI Shuting. Contact problem and numeric method of a planetary drive with small teeth number difference[J]. Mechanism and Machine Theory, 2008, 43(9): 1065-1086.
[13] XU Lizhong, ZHU Cuirong, QIN Lei. Parametric vibration for electromechanical integrated electrostatic harmonic drive[J]. Mechatronics, 2007, 17(1): 31-43.
[14] ����, ������, ���, ��. ��Բ�ֲ����������϶г�����ִ������������ȷ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2017, 48(12): 3231-3238.
YANG Yong, WANG Jiaxu, ZHOU Qinghua, et al. Exact solution for conjugate profiles of zero backlash harmonic drives with elliptical cam wave generators[J]. Journal of Central South University(Science and Technology), 2017, 48(12): 3231-3238.
[15] ��ΰ��, ������, ������. ��Ͳ����г�����ִ���������¹�����ʵ��[J]. ��������ҵ��ѧѧ��, 2014, 46(1): 40-46.
WU Weiguo, YU Pengfei, HOU Yueyang. New design, new process of harmonic drive with short flexspline and its experiment[J]. Journal of Harbin Institute of Technology, 2014, 46(1): 40-46.
[16] ���購. �ֳ�����ǵĶ�Ͳ����г�������Ż���Ƽ��о�[D]. ������: ��������ҵ��ѧ���繤��ѧԺ, 2017: 60-72.
CHE Hongchen. The optimization design and study of short flexpline harmonic drive with leaning teeth[D]. Harbin: Harbin Institute of Technology. School of Mechatronics Engineering, 2017: 60-72.
[17] ���˻�, �Ͼ���, ����ϼ. ������г�����ֵĿռ������Ƽ��������Է���[J]. ��е���, 2016, 33(3): 24-29.
LIU Denghui, XING Jingzhong, CHEN Xiaoxia. Spatial tooth profile design and engagement analysis of harmonic gear with involute profile[J]. Journal of Machine Design, 2016, 33(3): 24-29.
[18] ������. ��ά˫Բ������г�������ij�����������[D]. ����: �����ѧ��е����ѧԺ, 2016: 51-69.
ZHOU Xiangxiang. Three dimensional profile design and analysis of harmonic drive with double-circular-arc common-tangent tooth profile[D]. Chongqing: Chongqing University. College of Mechanical Engineering, 2016: 51-69.
[19] Ԭ��. ���ڳ������Ʒ���г�����ִ����ռ������������[D]. ����: �����ѧ��е����ѧԺ, 2017: 43-61.
YUAN Pan. Spatial profile design and analysis of harmonic drive by rack approximation theory[D]. Chongqing: Chongqing University. College of Mechanical Engineering, 2017: 43-61.
[20] ����ϼ. ���ڲ�϶���۵�г������Բ��������Ƽ�״̬�����о�[D]. ���: ���ҵ��ѧ��е����ѧԺ, 2012: 15-20.
CHEN Xiaoxia. Arc tooth profile design and simulation research of harmonic drive based on mesh backlash assessment[D]. Tianjin: Tianjin Polytechnic University. School of Mechanical Engineering, 2012: 15-20.
(�༭ ����ƽ)
�ո����ڣ� 2019 -11 -18; �����ڣ� 2020 -04 -09
������Ŀ(Foundation item)���㶫ʡ�ص������з��ƻ���Ŀ(2019B090917002)�������п�ί��ҵ���ص��з���Ŀ(cstc2018jszx-cyztzxX0039)�������п�ί�������ص��з���Ŀ(cstc2018jszx-cyzdX0056) (Project(2019B090917002) supported by the Research and Development Plans in Key Areas of Guangdong Province; Project(cstc2018jszx-cyztzxX0039) supported by the Key Research and Development Project of Technological Innovation and Application Demonstration Program of Chongging Municipality; Project(cstc2018jszx-cyzdX0056) supported by the Key Research and Development Project of Technological Innovation Program of Chongging Municipality)
ͨ�����ߣ���ѩ�ɣ���ʿ�������ڣ� ���¾��ܳ��ִ����о���E-mail��948203652@qq.com
ժҪ�����һ�־�ȷ�����ֲ�������г������������֮�临�ӿռ���εķ������÷�������ֱĸ�ٶ��������ֿռ���δ������������߱仯�����ֳݿռ䷽λ�仯�����شг�������˶�ѧģ�͡�����Բ��Ϊ����������ֵ���������ֿռ乲��������о����ֱ���ռ�����������Ŀռ�ת�Ǽ�������Ϲ����еĹ����������ֳ��˶��켣�ͳ������ϼ��ߴ���������Ӱ�졣�о�������������ֳݿռ䷽λת�Dz��ɺ��ӣ���������λ�������ת�DZ仯���Ӿ��ң��������ֳ�������������������Ȧ���������������Ҵ����������ϣ����ϽӴ�״�����š�
[2] ��Ԫѫ, ������. �������г���������ֱ��ε��о�[J]. �Ͼ�������ѧѧ��(��Ȼ��ѧ��), 1996, 20(1): 38-42.
[4] ������, ������, ������. г�����ִ���������Ӧ��������Ԫ����[J]. �й���е����, 2007, 18(18): 2210-2214.
[6] �����. �о�г�����ִ�������ԭ����һ���·���[J]. �й���е����, 2002, 13(3): 181-183.
[10] �����. ˫Բ��г�����ִ��������������[J]. �й���е����, 2011, 22(6): 656-662.
[11] ����. ���϶������г�����ִ����IJ����Ż���Ƽ�����Ԫ����[D]. �ػʵ�: ��ɽ��ѧ��е����ѧԺ, 2010: 33-60.
[16] ���購. �ֳ�����ǵĶ�Ͳ����г�������Ż���Ƽ��о�[D]. ������: ��������ҵ��ѧ���繤��ѧԺ, 2017: 60-72.
[17] ���˻�, �Ͼ���, ����ϼ. ������г�����ֵĿռ������Ƽ��������Է���[J]. ��е���, 2016, 33(3): 24-29.
[18] ������. ��ά˫Բ������г�������ij�����������[D]. ����: �����ѧ��е����ѧԺ, 2016: 51-69.
[19] Ԭ��. ���ڳ������Ʒ���г�����ִ����ռ������������[D]. ����: �����ѧ��е����ѧԺ, 2017: 43-61.
[20] ����ϼ. ���ڲ�϶���۵�г������Բ��������Ƽ�״̬�����о�[D]. ���: ���ҵ��ѧ��е����ѧԺ, 2012: 15-20.
