�ںϾ�̬���ĵ�EKFЭͬ��λ����
����껣������
(����������ѧ �Զ���ѧԺ��������100081)
ժҪ��Ϊ��Чʶ������������Эͬ��λʱ�ij�ͻ��Թ۲���Ϣ��ʹЭͬ��λ�и������������õ���Ϣ����һ���ԡ����Эͬ��λ��ʵʱ�Ժ���Ч�ԣ�����ں���ȫ��Ϣ��̬���ĵ�EKFЭͬ��λ�㷨���÷������þ�̬�������۶Ի����˼����Թ۲���Ϣ��ͻ����ʶ�����ݲ�������õ�һ����Թ۲���Ϣ����Эͬ��λ����Ի�����֮����Թ۲���Ϣ���ڵ���۲��˫��۲�2�����ͣ��ֱ��Ƶ�����ͬ��Эͬ��λ��ʽ������ʵ�����������㷨ʹ�������Ŷ���Эͬ��λʱ�ܸ���Ч�ʵ�ʵ����Ϣ�������ڱ�֤Эͬ��λ������ߵ�ͬʱ���ټ�������
�ؼ��ʣ����ƶ������ˣ���ȫ��Ϣ��̬���ģ�Эͬ��λ��EKF�㷨
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2013)11-4534-08
A new algorithm merging static game with complete information into EKF for multi-robot cooperative localization
HUA Chenghao, DOU Lihua
(School of Automation, Beijing Institute of Technology, Beijing 100081, China)
Abstract: For recognizing and eliminating the conflicting observations of multi-robot cooperative localization, while improving its consistency and effectiveness, a new cooperative localization algorithm which merged static game with complete information into EKF (extended Kalman filter) was proposed. The proposed algorithm uses the game theory to check the relative observations. After eliminating the conflicting relative observations, cooperative localization can be more effective. Since relative observations can be classified into two types, i.e one-sided relative observations and bidirectional relative observations, two sets of EKF cooperative localization formulations were respectively deduced. The simulation results show that the proposed algorithm makes the robot team only share coherent relative observations between them. It ensures the improvement of localization accuracy of every robot and reduces the computational complexity at the same time.
Key words: multi-robot; static game with complete information; cooperative localization; EKF algorithm
������λ�������ƶ��������ڸ��ָ��ӻ����ж�����Ч��ȷ������λ�ˣ����������Ǹ��������������ȷ�ľ��ߺ�·��ѡ��Ĺؼ�[1-3]������θ�����Ч��Ӧ�û�����������Я�����ڡ��ⲿ��������֪����Ϣ��ʵ�ָ�Ч���ɿ���λ�˹����ǵ�ǰ�������Զ�λ����������Эͬ��λ�о��б��ܹ�ע�p������ս�ԵĿ� ��[4-5]��Ŀǰ�������ǵ�����ƶ�������������λ���ܵ���Ч���ɿ�ʵ�֣�������ͨ���ռ�������Я���ĸ����ڡ��ⲿ����������Ϣ�������ø����Ż����ۺ������ں��㷨������һ���Ĵ����ͱ任�������������������ŶӶԵ�ǰ����λ�˽���ȷ����[6-8]�����е��ƶ���������������λ�����ϳ��죬��Ŀǰ�������Эͬ��λ��������ǽ������˼����Թ۲���Ϣ�������ϳ���ĵ���λ����������չӦ�ã��磺Roumeliotis��[9]��������˼���EKF��λ�㷨�еĽ���������ֲ�������صĸ����������Ͻ������㣻Wang��[10]�����PF-EKF��λ����������Эͬ��λ��Luca��[11]��չ���Ľ��˵������˵�Rao-Blackwellized�����˲���λ�㷨��������ԭ�㷨��Эͬ��λʱ��Ӧ��������Ҫ������ö��[12]��ͨ��PF�������Ⱥ�Ż��㷨������칹�����˵�Эͬ��λ�����������ܽ���Ч�ش������ƶ������˵�Эͬ��λ���⣬��Ҳ����δ�����г�ͻ��Թ۲���Ϣ��������������������⣬��Ҳ�����˿������˲�ϵ���㷨���˲���ɢ��������ֵĿ����ԡ�Ϊ�˷���Щ���㣬���������EKF�㷨[9, 13]���ں���ȫ��Ϣ��̬��������[14-15]������Զ�����˼䵥��۲��˫��۲���2��������в�ͬ�IJ��ķ������ֱ��Ƶ����Ե�EKFЭͬ��λ��ʽ��������ʵ��֤ʵ��Ӧ�ò��IJ�����Ч�ؽ���˶������Эͬ��λʱ�������˸�֪���ݹ����������������������ں����⣬���Ҽ�����Эͬ��λ�����д�������Ҫ�ļ�������ȷ����Эͬ��λ��λ�˸���ȷ���ɿ���
1 ������˼��Эͬ��λģ��
1.1 ��Թ۲�ģ��
�����ɸ�����������Ŷ���ijһ�ṹ�������н���Эͬ��λʱ���ȵ������˵��Զ�λ�������Ե���Ϣ���ƣ������˼�ᾭ���ж�ͬ��Ĺ۲���Ϣ�����統������j�����ڻ�����i����Ұ��ʱ������2��������ӭ������ʱ��Ϊ���������������ֻ����˼�Ĺ۲���Ϣ[5]�Լ����ڴ���Ϣ���������ϵ�Эͬ��λģ�ͣ��������¼��裺
(1) �������ڽṹ����ƽ�滷�����˶���ÿ�������˵�λ�˶�������һ��ͳһ��ȫ������ϵ�µĶ�ά����ͳ���������ɵ��������������� ��
��
(2) ÿ�������˶����������˶���֪���������ⲿ������֪����������ʵ�ֻ����е����Ҷ�λ�������õ�ʶ�������������˲���ö���Ĺ۲���Ϣ��
(3) ������֮���ܹ�����ʵʱͨѶ��ij�������˻ἰʱ�ؽ�����������Ϣ�����������������˵Ĺ۲���Ϣ�������л����˶��ѡ��������Ҳ�ǻ����˼��ܹ�����Эͬ��λ����Ҫǰ�ᡣ
(4) ���ӻ�������ͬ���ģ������������ǵ��ⲿ��������������ͬ�ģ���������DZ˴˼�Ĺ۲���Ϣ����ͬ���͵ģ�������ͬһ��ѧģ�ͽ�������������һ������������˵���Ұ���� ����ֻ�е�����������λ�ڻ�����iǰ��180����ӽǷ�Χ�ڲſ��ܱ�i�۲��
����ֻ�е�����������λ�ڻ�����iǰ��180����ӽǷ�Χ�ڲſ��ܱ�i�۲��
��������i�۲������jʱ���ü�����ֵ ����ʾ�ù۲���Ϣ��
����ʾ�ù۲���Ϣ�� �ǻ�����i�Ĺ۲��£�������i��j֮��ľ��룻
�ǻ�����i�Ĺ۲��£�������i��j֮��ľ��룻 ��i��j����ԽǶȡ���������ŵ��ϱ�(ij)��ʾ������i�Ի�����j�Ĺ۲⣬�ϱ�(ji)��ʾj��i�Ĺ۲⡣
��i��j����ԽǶȡ���������ŵ��ϱ�(ij)��ʾ������i�Ի�����j�Ĺ۲⣬�ϱ�(ji)��ʾj��i�Ĺ۲⡣
��ijʱ�̣�i��j�˴˹۲�˶Է���������i�й۲���Ϣ����������j��Ӧ���й۲���Ϣ ������۲����������κ���������۲�ľ�����Ϣ��2�������˼�ľ���
������۲����������κ���������۲�ľ�����Ϣ��2�������˼�ľ��� �����¹�ϵ��
�����¹�ϵ��
 (1)
(1)
��2�������˸��Բ�������ԽǶ��������i��������j�ij���Dz� �������¹�ϵ��
�������¹�ϵ��
 (2)
(2)
���� ��
�� ��
��
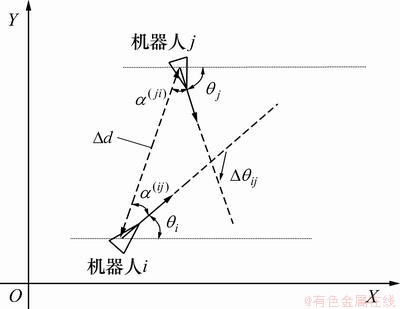
ͼ1 ������i��j֮�����۲���Ϣ
Fig.1 Relative observations between robot i and robot j
���ڻ�����������λ���������أ���ijЩ�ض�����£�������0�㸽�����������Ӱ��ʽ(2)��Ӧ�á���Ϊ ��
�� ��Χ��������ȣ�����������2Ϊ���ڣ�����, �����Ǻ�����ʽ����ʽ(2)�õ���
��Χ��������ȣ�����������2Ϊ���ڣ�����, �����Ǻ�����ʽ����ʽ(2)�õ���
 (3)
(3)
�������Ĺ۲���Ϣ�Ǵ��������ģ����贫�����IJ����������ϰ�����(��̬�ֲ�)���ֱ��� ��
�� ��
�� ��
�� ��ʾ������i��j���ⲿ�������Ĺ۲����������ӵķֲ�����Ϊ��������ͬ���ģ����ԣ���
��ʾ������i��j���ⲿ�������Ĺ۲����������ӵķֲ�����Ϊ��������ͬ���ģ����ԣ��� ��
�� ����
���� ��ʾ������Ծ���IJ���������
��ʾ������Ծ���IJ��������� ��ʾ������ԽǶȵIJ������������˹۲�������2��������������λ�����ڲ�ȷ���ԣ������˻����˼���Թ۲���Ϣ��һ��������ͻ�������Ϊ�ˣ��������жϻ��������۲���Ϣ�Ƿ�һ�µĻ�����������ȫ��Ϣ��̬�������ۣ�ͨ�������˼以�����Ķ�����ѡ�����ŵĺ���ʱ����
��ʾ������ԽǶȵIJ������������˹۲�������2��������������λ�����ڲ�ȷ���ԣ������˻����˼���Թ۲���Ϣ��һ��������ͻ�������Ϊ�ˣ��������жϻ��������۲���Ϣ�Ƿ�һ�µĻ�����������ȫ��Ϣ��̬�������ۣ�ͨ�������˼以�����Ķ�����ѡ�����ŵĺ���ʱ����
1.2 Эͬ��λ�IJ���ģ��
��G={1, 2, ��, n}Ϊ���л����˵ļ��ϣ�ÿ�������˶�Ӧ1����ţ���1�������IJ��IJ����ߡ���i�������ߵIJ��Կռ�Ϊsi={0, 1} (���У�0��ʾ���Զ�λ��1��ʾ����Эͬ��λ)��
�ڲ����У������в�����ѡ���IJ�������ͬ����ÿ�������˵����档�����������˲�ȡij�ض�����(s1, ��, si-1, si+1, ��, sn)����������i��ȡ����siʱ�������溯��Ϊ
ui(s1, ��, s1, ��, sn); i=1, 2, ��, n
��n�������˽���Эͬ��λ�IJ��Ŀ���G={s1, ��, sn; u1, ��, un}������
2 �ںϲ����۵�Эͬ��λ�㷨
2.1 ����۲�ʱ��Эͬ��λ
Ϊ���о������˼�ֻ�е���۲�ʱ��ν���Эͬ��λ�����⣬�����Ե���۲���Ϣ�뱻�۲�������Զ�λ��Ϣ��һ�³̶�Ϊ����ָ��IJ��Ļ��ƣ�����һ����ȫ��Ϣ�ľ�̬����[14]��
����۲�ʱ��ֻ��һ�������˱��۲�����ݲ����۵�ԭ�������ȶ��岩�ĵIJ�����Ϊ������i�ͱ�i�۲�Ļ�����j��������iΪ������j�ṩ�۲���Ϣ����j�IJ����Ǹ���i�ṩ��Ϣ��Ч���������Ƿ���ø���Ϣ���ڹ۲�ʱ���в����߶�ͬʱ��ȡ�ж�����ˣ�������һ����̬���ġ�
�����е��ж�����Ϣ�����ԡ�����Ȼ���Ԫ�طֱ������¡�
��Ϣ��i��j�Ĺ۲����Լ�i��j���ԵĶ�λλ��Ϊ�����е���Ϣ���������ӻ�����֮�䶼���Լ�ʱ��ͨѶ�����ԣ��������е���Ϣ�Լ�����Ԫ�ض��Dz����ߵĹ�֪ͬʶ����������һ����ȫ��Ϣ���ġ�
���ԣ�������ÿһ�����ܵ��ж�����һ�����ԣ��ڵ���۲��Э����λ�л����˵IJ��Է�Ϊ����/��������
���棺i��j�Ķ�λ��Ϣ��j������λ��Ϣ��һ�³̶���Ϊ����ʱ�����棬�������Զ�λʱ��������Ϊ1��
���溯������ֻ�л�����i�۲������jʱ�����j�Ķ�λ���£�

 (4)
(4)
���У��ϱ�{i}��ʾ������i�Ĺ۲�Ľ��������ʽ���ſ˱Ⱦ���
 (5)
(5)
���� ��
��
��֪������i���Զ�λ��� ��i�IJ������
��i�IJ������ ��������i��λ������Э�������Pi����Թ۲���������Э�������Rij��Ӧ�����ݹ�ʽ�����i��j�Ķ�λ����Э�������Ϊ
��������i��λ������Э�������Pi����Թ۲���������Э�������Rij��Ӧ�����ݹ�ʽ�����i��j�Ķ�λ����Э�������Ϊ
 ��PijΪ2��2�ľ���
��PijΪ2��2�ľ���
�� ��Xj֮��ľ�������̶�Ϊ2�������˺���Ч�������б���ͨ�������˵�λ�˲�ȷ������Բ�г��ᶥ�㵽���ᶥ��ľ�����������
��Xj֮��ľ�������̶�Ϊ2�������˺���Ч�������б���ͨ�������˵�λ�˲�ȷ������Բ�г��ᶥ�㵽���ᶥ��ľ����������� ������ֵ�ֱ�Ϊλ�˲�ȷ������Բ�İ볤��Ͱ���ᣬ��Ϊaij��bij�����Ƶأ���
������ֵ�ֱ�Ϊλ�˲�ȷ������Բ�İ볤��Ͱ���ᣬ��Ϊaij��bij�����Ƶأ��� ������ֵ�������Ϊaj��bj���õ���
������ֵ�������Ϊaj��bj���õ���
 (6)
(6)
��ʽ(6)�õ����ĵ����溯����
 (7)
(7)
Ϊ�˴ﵽЭͬ��λ����ƻ�����j��λЧ����Ŀ�ģ���һ��Ҫ��Pij��Pj����λ������Э����������Խ�Ԫ�����ɵ���Բ����������бȽϣ��� ��
�� ��
��
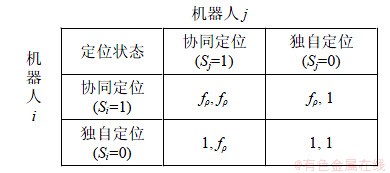
�ڵ���۲�ʱ��������iֻ�ܶ��Զ�λ�������˶��Զ�λʱ������Ϊ1����ˣ���������i�������j�IJ��ı�ʾ���£�
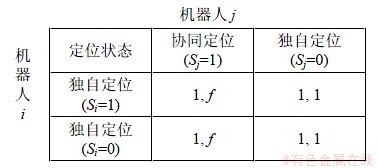
���˲��ĵ���ʲ����[15]����f��1ʱ����uj[Si, Sj=1]=f��uj[Si, Sj=0]=1����ʱ��Эͬ��λ�ǻ�����j��ռ�Ų��ԡ� ���Ŀ��ԴﵽΨһ����ʲ����(���Զ�λ��Эͬ��λ)����f��1ʱ����uj[Si, Sj=1]=f��uj[Si, Sj=0]=1����ʱ���Զ�λ��˫����ռ�Ų��ԡ����Ŀ��ԴﵽΨһ����ʲ����(���Զ�λ�����Զ�λ)����f=1ʱ�����ۺ���������ߵ����涼��1����Эͬ��λ���������ļ��㣬��ˣ����Զ�����λ��ռ�ŵġ�
��2��������Эͬ��λʱ������EKFЭͬ��λ�㷨[9, 13]��EKFЭͬ��λ�㷨��2�֡�
(1) Ԥ�⡣��ǰʱ�̻�����i��j���Բ���EKF�������˶�λ�㷨�����λ����ΪԤ�ⲽ��Ľ����
Ԥ��λ�� ��Ԥ��λ������Э�������
��Ԥ��λ������Э������� ��
��
(2) ���¡���ʱЭͬ��λ�Ĺ۲ⷽ��Ϊ��
 (8)
(8)
���У�vΪ��Թ۲���������Э�������ΪRij��
�۲ⷽ�̵��ſ˱Ⱦ���Ϊ
 (9)
(9)
���� ��
�� ��
�� ��
��
����EKF��ʽ��ÿ��������棺
 (10)
(10)
����۲������Эͬ��λ��λ��Ϊ
 (11)
(11)
����
λ������Э�������Ϊ
 (12)
(12)
����������ֱ���2������Эͬ��λ�Ļ����ˡ�
2.2 ˫��۲�ʱ��Эͬ��λ
������2�������˼���й۲���Ϣʱ��������˫��۲⣬��ʱ����Ҫ������Ʋ��Ļ��ơ�Ӧͬʱ������Ծ������ԽǶȲ�����һ�³̶ȣ���֮��Ϊ����ָ�꣬��������Ӧ����ȫ��Ϣ��̬���ĵ��㷨����ʱ�����ĵIJ���������Կռ䲻�䣬����������һ�����ߵĹ۲���Ϣ���Ӷ������������¶���Ϊ��i��j����Թ۲���Ϣ��j��i����Թ۲���Ϣ��һ�³̶���Ϊ����ʱ�����档�������Զ�λʱ��������Ϊ1��
���溯�������ȿ��� ��
�� ��һ�³̶ȣ���2������ֵ�IJ�
��һ�³̶ȣ���2������ֵ�IJ� ��Ϊ�жϱ�����֪�����Ƕ���ͬ�ֲ��ģ�������
��Ϊ�жϱ�����֪�����Ƕ���ͬ�ֲ��ģ������� ����
���� ~
~ ������̬�ֲ�������֪������
������̬�ֲ�������֪������ ʱ��������Ϊ����һ�µġ��ñ�ʾ��һ�³̶ȵĺ���
ʱ��������Ϊ����һ�µġ��ñ�ʾ��һ�³̶ȵĺ��� ��Ϊ��Ծ��벩���л�����ѡ�����ʱ�����溯����
��Ϊ��Ծ��벩���л�����ѡ�����ʱ�����溯����
�ٱȽ� ��
�� ��һ�³̶ȡ��������ǻ�����i��j�Ը���Ϊ���Ļ�õIJ����Ƕȣ�������ֱ�ӱȽϣ����ǵ�һ�³̶���Ҫͨ�����ıȽ϶���ӵõ���
��һ�³̶ȡ��������ǻ�����i��j�Ը���Ϊ���Ļ�õIJ����Ƕȣ�������ֱ�ӱȽϣ����ǵ�һ�³̶���Ҫͨ�����ıȽ϶���ӵõ���
 �ķ���Ϊ
�ķ���Ϊ
 ������
������ ��
�� �ֱ��ǻ�����i��jλ�˽Ƕȷ����ķ������ͳ��ѧ���ɣ�ȡ
�ֱ��ǻ�����i��jλ�˽Ƕȷ����ķ������ͳ��ѧ���ɣ�ȡ ��������Ŷȣ��������С��
��������Ŷȣ��������С�� ������Ϊ���ߵ�һ�³̶��ڿɽ��ܷ�Χ�ڡ���(3)ʽ֪��
������Ϊ���ߵ�һ�³̶��ڿɽ��ܷ�Χ�ڡ���(3)ʽ֪�� Ӧ��������
Ӧ�������� �ڡ���ˣ����壺
�ڡ���ˣ����壺
 (13)
(13)
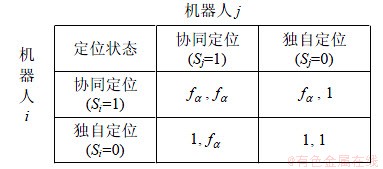
Ϊ��ԽǶȲ����л�����ѡ�����ʱ�����溯���������溯���Ĺ�ʽ��֪������һ��Ϊ�Ǹ�����
�������Ϸ������ɽ���Ծ��벩�ı�ʾ���£�
�������ʾ�IJ��ĵ���ʲ���⡣�� ��1ʱ�����ڲ���������i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ��Эͬ��λ��˫����ռ�Ų��ԡ����Ŀ��ԴﵽΨһ����ʲ����(Эͬ��λ��Эͬ��λ)������1ʱ�����ڻ�����i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ�����Զ�λ��˫����ռ�Ų��ԣ����Ŀ��ԴﵽΨһ����ʲ����(���Զ�λ�����Զ�λ)����=1ʱ�������������ߵ����涼��1����Эͬ��λ�����Ķ������������Ϊһ���ĸ����棬��ʱ��ѡ����Զ�����λ��ռ�ŵġ���ԽǶȲ��ı�ʾ���£�
��1ʱ�����ڲ���������i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ��Эͬ��λ��˫����ռ�Ų��ԡ����Ŀ��ԴﵽΨһ����ʲ����(Эͬ��λ��Эͬ��λ)������1ʱ�����ڻ�����i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ�����Զ�λ��˫����ռ�Ų��ԣ����Ŀ��ԴﵽΨһ����ʲ����(���Զ�λ�����Զ�λ)����=1ʱ�������������ߵ����涼��1����Эͬ��λ�����Ķ������������Ϊһ���ĸ����棬��ʱ��ѡ����Զ�����λ��ռ�ŵġ���ԽǶȲ��ı�ʾ���£�
�������ʾ�IJ��ĵ���ʲ������֮ǰ���ơ��� ��1ʱ�����ڲ���������i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ��Эͬ��λ��˫����ռ�Ų��ԣ����Ŀ��ԴﵽΨһ����ʲ����(Эͬ��λ��Эͬ��λ)������1ʱ�����ڻ�����i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ�����Զ�λ��˫����ռ�Ų��ԣ����Ŀ��ԴﵽΨһ����ʲ����(���Զ�λ�����Զ�λ)����=1ʱ����Ϊ�����������ߵ����涼��1����ʱ��ѡ����Զ�����λ��ռ�ŵġ�
��1ʱ�����ڲ���������i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ��Эͬ��λ��˫����ռ�Ų��ԣ����Ŀ��ԴﵽΨһ����ʲ����(Эͬ��λ��Эͬ��λ)������1ʱ�����ڻ�����i����ui[Si=1, Sj]=��ui[Si=0, Sj]=1�����ڻ�����j����uj[Si, Sj=1]=��uj[Si, Sj=0]=1����ʱ�����Զ�λ��˫����ռ�Ų��ԣ����Ŀ��ԴﵽΨһ����ʲ����(���Զ�λ�����Զ�λ)����=1ʱ����Ϊ�����������ߵ����涼��1����ʱ��ѡ����Զ�����λ��ռ�ŵġ�
˫��۲�ʱ��ֻ�е�����2�����ĵĽ�����Ǻ���ʱ��������i��j�Ż��ȡЭͬ��λ��������EKFЭͬ��λ�㷨���뵥��۲�ʱ���ƣ�˫��۲�ʱ��EKFЭͬ��λ�㷨Ҳ�Ƿ�2����
(1) Ԥ�⡣��ǰʱ�̻�����i��j�ĸ��Զ�λλ��
��ΪԤ�ⲽ��Ľ����Ԥ��λ����Ԥ��λ������Э������� ��
��
(2) ���¡�Эͬ��λ�Ĺ۲ⷽ��Ϊ��

 (14)
(14)
���У�vΪ2����Թ۲�����֮�ͣ���Э�������Ϊ2Rij���۲ⷽ�̵��ſ˱Ⱦ���Ϊ
 (15)
(15)
���� ������
������
����EKF��ʽ���Эͬ��λ�Ŀ��������棺
(16)
˫��۲�ʱЭͬ��λ��λ��Ϊ
 (17)
(17)
����

˫��۲�ʱλ������Э�������Ϊ
 (18)
(18)
�������Эͬλ��X��Эͬλ�����P�ֱ���2������Эͬ��λ�Ļ����ˡ�
3 ������������
Ϊ����֤�����������Эͬ��λ��������Ч�ԣ���Open SLAM�ṩ��SLAM(ͬ����λ����ͼ)��Դ�������Ļ�����[16]������1���������Эͬ��λ�ķ���ƽ̨����1��200 m��200 m�ķ���ռ��ڣ��������������Ǻű�ʾ��·��������������α�ʾ�Ļ����ˡ�ÿ�������˶��ܹ۲��ǰ��180�㷶Χ�ڳ���������������Ծ������ԽǶȣ����۲ⷶΧΪ50 m��
Эͬ��λ�㷨�Ķ�λ�켣��ͼ2��ʾ����ͼ2�ɼ���3��ͬ�������˰����趨�ĸ��Թ켣�˶����ٶȾ�Ϊ2 m/s����������Ϊ =0.3 m/s��
=0.3 m/s�� =3�㣻ģ��ļ������Dz�������Ϊ=0.05 m��=3�㡣�������˵�����λʱ����EKF��λ�㷨�����ڳ�����Թ۲�ʱ����ñ���������ںϾ�̬���ĵ�EKFЭͬ��λ�㷨��
=3�㣻ģ��ļ������Dz�������Ϊ=0.05 m��=3�㡣�������˵�����λʱ����EKF��λ�㷨�����ڳ�����Թ۲�ʱ����ñ���������ںϾ�̬���ĵ�EKFЭͬ��λ�㷨��
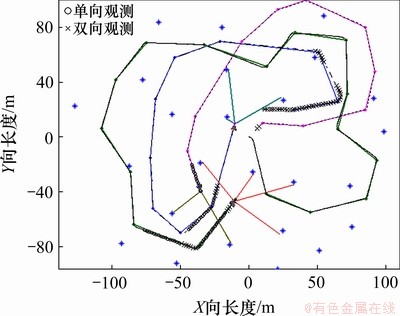
ͼ2 Эͬ��λ�㷨�Ķ�λ�켣
Fig.2 Localization trajectories of the proposed algorithm
�ڷ���ʵ���У���ʼλ�ˡ��˶��켣�����3�������˼����ֶ����Թ۲����ݡ���Щ���ݶ����Է�Ϊ����۲����ݺ�˫��۲�����2�ࡣ����2��۲����ʱ�Ļ����˹켣�ֱ��ʶ����ͼ3��
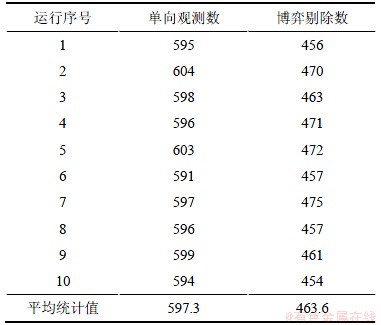
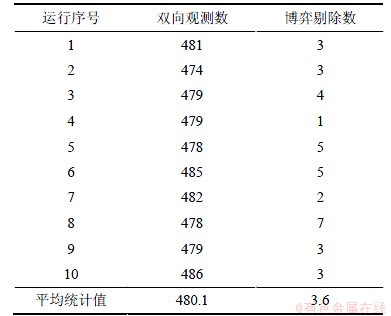
�ظ����з���ʵ��10�Σ���¼����۲��˫��۲���2����������ij�ͻ�۲����ݣ�����1�ͱ�2��
�ӱ�1�ͱ�2�ɼ������ñ��������Эͬ��λ�㷨�������Эͬ��λ���µļ������ֱ������77.62%(����۲�ʱ)��0.75%(˫��۲�ʱ)�����е���۲�ʱ���۲������iֻ�жԱ��۲������j�ṩ���õĶ�λЧ�������ڲ����С�˵����������j������ȡ��������ˣ��ڻ��������нϾ���EKF�������˶�λ�㷨��ǰ���£�����������㷨ֻ�����˽��ٵĵ�����Թ۲����ݣ�����˫��۲�ʱ���Ƕ�2����������۲����ݵ�һ�³̶Ƚ����жϣ���ˣ���ģ��Ĺ۲������㹻��ȷ��ǰ���±����˴�����˫����Թ۲����ݡ���Ҳ˵���ڹ۲���Ϣ�õ��ӡ֤��˫��۲�ʱ�������˼�Ӧ�ø���ز���Эͬ��λ�ķ�ʽ��
��1 ���������ĵ���۲��ͻ��
Table 1 Diminished one-sided relative observations after gaining ��
��2 ����������˫��۲��ͻ��
Table 2 Diminished bidirectional relative observations after gaining ��
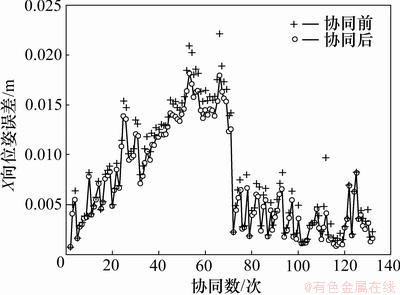
ͼ3 ij������Эͬǰ��X��λ�����ĶԱ�
Fig.3 Localization errors of X axis before cooperative localization and after cooperative localization
����۲�ʱ��1�������˲���Эͬ��λǰ����X�������λ�������ͼ3��ʾ����ͼ3���Կ�����ÿ��Эͬ�û�������X�������λ������Эͬǰ����һ����С��
Ϊ�˸�ȷ������Эͬ��λ���ļ�������������Эͬ��λ��2��������Эͬǰλ������Э��������ȥЭͬ��λλ������Э��������ֱ��ʶ2�������˵����ݡ�ͼ4��ͼ5��ʾ�ֱ�Ϊ����۲��˫��۲�ʱ��ÿ��Эͬ��λ��2��������λ�˸�����������Эͬǰ�ļ���������ͼ4��ͼ5���Կ�����2�������˵�λ�˾���ͨ��Эͬ��λ���õ���һ����ߡ�����֤�˾�����������ѡ����Թ۲����ݴ����ĺ���Ч�涼������ģ�����������㷨��֤��ÿ��Эͬ��λ�������λ�˾��ȵ���ߡ�
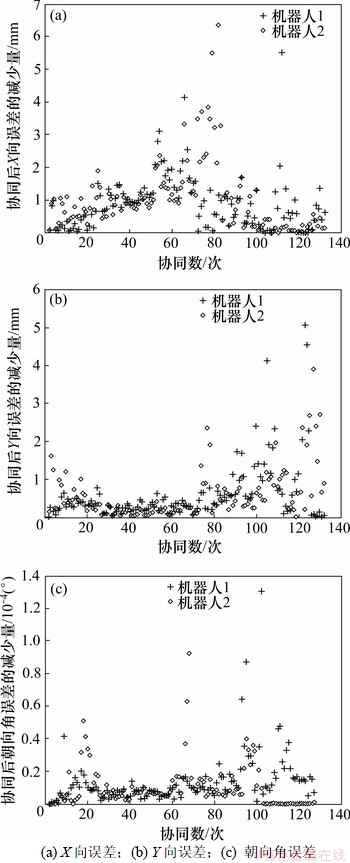
ͼ4 ����۲�ʱ2��������Эͬ��λ�˾��ȵ������
Fig.4 Localization accuracy improvements using proposed algorithm when robots have only one-sided observations
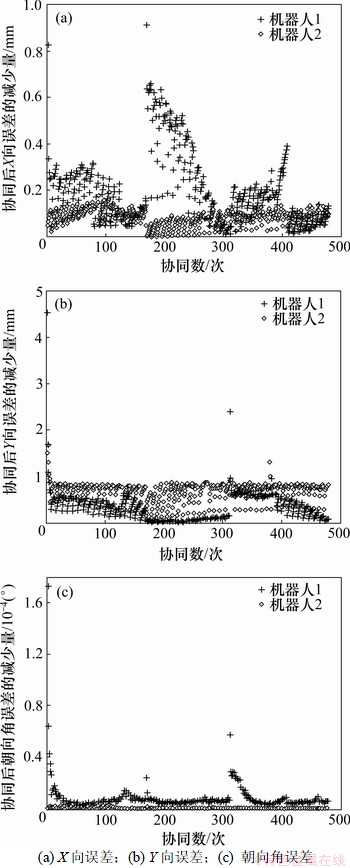
ͼ5 ˫��۲�ʱ2��������Эͬ��λ�˾��ȵ������
Fig.5 Localization accuracy improvements using proposed algorithm when robots have bidirectional observations
4 ����
��Զ��ƶ������˵�Эͬ��λ���⣬�����һ�ֿɳ�ּ�������˼���Թ۲�����һ���Ե��ں���ȫ��Ϣ��̬���ĵ�EKFЭͬ��λ�㷨��������Թ۲�ɷ�Ϊ����۲��˫��۲���ص㣬�㷨����˲�ͬ�IJ��Ļ��ƣ����ֱ��Ƶ�����ͬ��Эͬ��λ��ʽ���㷨����Ҫ�ɹ������ڣ�
(1) ͨ���������ģ������˼���Эͬ��λʱ�ܸ���Ч�ʵ�ʵ����Ϣ��������С�˼��㸴�Ӷȡ�
(2) ���ĺ�����ѡ����Թ۲����ݴ����ĺ���Ч����������ģ���֤��ÿ��Эͬ��λ�������λ�˾��ȶ�����Ч��ߡ�
�ο����ף�
[1] Thrun S, Fox D, Burgard W, et al. Robust Monte Carlo Localization for mobile robots[J]. Artificial Intelligence, 2001, 128(1/2): 99-141.
[2] Filliata D, Meyerb J A. Map-based navigation in mobile robots: ��. A review of localization strategies[J]. Cognitive Systems Research, 2003, 4(4): 243-282.
[3] Durrant-Whyte H, Bailey T. Simultaneous localization and mapping: Part ��[J]. IEEE Robotics & Automation Magazine, 2006,13(2): 99-110.
[4] Frese U. A discussion of simultaneous localization and mapping[J]. Autonomous Robots, 2006, 20(1): 25-42.
[5] Martinelli A, Pont F, Siegwart R. Multi-robot localization using relative observations[C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona, Spain, 2005: 2797-2802.
[6] Gutmann J S, Weigel T, Nebel B. A fast, accurate and robust method for self-localization in polygonal environments using laser range finders[J]. Advanced Robotics, 2001, 14(8): 651-667.
[7] Minguez J, Montesano L, Lamiraux F. Metric-based iterative closest point scan matching for sensor displacement estimation[J]. IEEE Transactions on Robotics, 2006, 22(5): 1047-1054.
[8] Zhou X S, Roumeliotis S I. Robot-to-robot relative pose estimation from range measurements[J]. IEEE Transactions on Robotics, 2008, 24(6): 1379-1393.
[9] Roumeliotis S I, Bekey G A. Distributed multirobot localization[J]. IEEE Transactions on Robotics and Automation, 2002, 18(5): 781-795.
[10] WANG Ling, WAN Jianwei, LIU Yunhui, et al. Cooperative localization method for multi-robot based on PF-EKF[J]. Science in China Series F: Information Science, 2008, 51(8): 1125-1137.
[11] Luca C,Miguel K N,Jing J D,et al.Rao-blackwellized particle filter multi-robot SLAM with unknown initial correspondences and limited communication[C]//2010 IEEE International Conference on Robotics and Automation. Alaska, USA, 2010: 243-250.
[12] ����ö, ������. ����Ⱥ�Ż��Ķ������Э����λ����[J]. ���ϴ�ѧѧ��: ��Ȼ��ѧ��, 2011, 42(3): 682-687.
LIU Limei, CAI Zixing. Multi-robot cooperative localization based on particle swarm optimization[J]. Journal of Central South University: Science and Technology, 2011, 42(3): 682-687.
[13] Thrun S, Burgard W, Fox D. Probabilistic robotics[M]. Massachusetts: MIT Press, 2005: 48-53.
[14] ���ء�����˹. �����ۻ���[M]. �߷�, ��. ����: �й�����ѧ������, 1999: 2-23.
Gibbons R. A primer in game theory[M]. GAO Feng, trans. Beijing: China Social Sciences Press, 1999: 2-23.
[15] �Ƕ�����ɭ. ����: �����۵���[M]. �ѷ���, ����ܰ, ��. �Ϻ�: �Ϻ����������, 2010: 77-88.
Watson J. Strategy: An introduction to game theory[M]. FEI Fangyu, LAI Danxin, trans. Shanghai: Shanghai People��s Publishing House, 2010: 77-88.
[16] Bailey T, Nieto J. SLAM package of tim bailey[EB/OL]. [2013-03-15]. http://openslam.org/bailey-slam.html.
(�༭ �²ӻ�)
�ո����ڣ�2013-03-15�������ڣ�2013-05-14
������Ŀ�������н���ίԱ�Ṳ��ר��������Ŀ(XK100070532)
ͨ�����ߣ������(1983-)���У������ڶ��ˣ���ʿ�о������������ܻ�����������λ�о����绰��010-68912463��E-mail: huachenghao@bit.edu.cn

