DOI: 10.11817/j.issn.1672-7207.2019.09.012
基于量化控制的网络系统稳定性分析
陈刚1, 2,陈云1, 2,王炜1, 2
(1. 湖南工业大学 电气与信息工程学院,湖南 株洲,412007;
2. 电传动控制与智能装备湖南省重点实验室,湖南 株洲,412007)
摘要:研究一类带有量化的网络控制系统的渐进稳定性问题。首先,根据线性网络控制系统的特点和一类对数量化器的扇形有界条件,建立1个网络控制系统的静态量化模型;然后,针对所建立的静态量化模型,基于Lyapunov- Krasovskii(L-K)稳定性分析理论,通过构建1个全新的增广L-K泛函,采用1个由贝塞尔-勒让得(B-L)积分不等式和基于函数的辅助型积分不等式衍生而来的新积分不等式,该不等式能够更加与构建的泛函紧密相结合;运用逆凸技术和含自由权矩阵的恒零等式,获得1个少保守性的渐进稳定性新判据;最后,通过数值实例进行仿真研究。研究结果表明:新的增广L-K泛函和新积分不等式能够使得到的渐进稳定性判据较优且有效。
关键词:网络控制系统;稳定性;量化;Lyapunov-Krasovskii泛函
中图分类号:TP273 文献标志码:A 文章编号:1672-7207(2019)09-2156-07
Stability analysis for network system based on quantitative control
CHEN Gang1, 2, CHEN Yun1, 2, WANG Wei1, 2
(1. School of Electrical and Information Engineering, Hunan University of Technology, Zhuzhou 412007, China;
2. Key Laboratory for Electric Drive Control and Intelligent of Hunan Province, Zhuzhou 412007, China)
Abstract: The asymptotic stability of a class of network control system with quantization was studied. Firstly, according to the characteristics of linear network control system and the sector bounded condition of a class of logarithmic quantizer, a static quantization model of network control system was established. Secondly, based on the Lyapunov-Krasovskii (L-K) stability analysis theory, a new asymptotic stability criterion of the less conservative was obtained by constructing a novel augmented L-K functional. By using the reciprocally convex approach and the constant zero equality with free-weighting matrix and the new integral inequality, the new integral inequality was derived from the Bessel-Legendre(B-L) integral inequality and the auxiliary function-based integral inequality, which could be more closely combined with the constructed functional.Finally,simulation was conducted with numerical examples. The results show that the new augmented L-K functional and the new integral inequality can make the obtained asymptotic stability criteria better, and the criterion is effective.
Key words: network control system; stability; quantization; Lyapunov-Krasovskii functional
在过去20年中,随着高速通信网络技术的快速发展,网络控制系统受到众多学者的关注[1-2]。网络控制系统由传感器、控制器、执行器等连接而成,具有低成本、易安装、易维修等优点,在工业控制领域得到广泛应用[3]。然而,分析带有量化的网络控制系统稳定性问题是不可避免的。目前,采用量化反馈控制处理网络系统的量化问题是最流行的方法之一,反馈中的量化误差是网络控制系统性能保障的重要指标,所以,对带有量化误差的网络系统渐进稳定性进行分析具有重要意义[4]。近年来,人们针对网络控制系统的量化问题进行了大量研究[1-10],如:PHAT等[5]使用鲁棒控制方法研究量化反馈控制系统,最终设计了1个鲁棒稳定控制器;TSUMURA等[6]考虑网络控制系统受量化与随机丢包的影响,研究了具有无限量化水平的对数量化器的均值稳定性,揭示了量化水平与丢包概率之间的关系;LIU等[7]分析了带有混合出发和随机网络攻击的T-S模糊系统的量化稳定性问题;ZHOU等[8]基于后向的自适应控制方法对量化器的输入信号进行了处理。尽管研究者们对网络控制系统的量化问题研究取得了一定的成果,但对于一类带有量化的线性网络控制系统稳定性问题研究较少。为此,本文首先将成熟的L-K理论和时滞系统控制方法[11-21]与网络控制系统量化特性相结合,建立1个网络控制系统静态量化模型。然后,通过构建1个全新的泛函以及运用1个由二阶B-L不等式与基于函数的辅助型不等式衍生的新积分不等式、逆凸方法和自由权矩阵,对网络控制系统静态量化模型的稳定性进行分析,得到1个以线性矩阵不等式(LMI)形式存在的全新稳定性判据,最后通过数例仿真结果来说明该判据的有效性和优越性。
1 系统描述
为表述简单,采用如下标号:Rn和Rn×m分别代表实数域的n维向量空间和n×m的矩阵空间;若矩阵X>0,则表示矩阵X是对称正定矩阵;0和I分别为零矩阵和单位矩阵;矩阵或矢量的上标T和-1分别表示矩阵或矢量的转置和求逆;定义Sym{N}为N+N T,其中N为任意矩阵;在块矩阵中,“*”表示其对称项,diag{b1,  , bn}代表块对角矩阵。
, bn}代表块对角矩阵。
在网络控制系统中,在线性控制率作用下,系统模型可描述为
 (1)
(1)
式中:x(t) Rn,为系统状态向量;u(t)Rm,为系统控制输入;K为系统控制增益矩阵;A和B为有合适维度的系统矩阵。
Rn,为系统状态向量;u(t)Rm,为系统控制输入;K为系统控制增益矩阵;A和B为有合适维度的系统矩阵。
假设所用量化器为对数量化器,有如下量化级数集合u[9]:
u={±u:ui=ρi,i=±1,±2,…} {±u0}{0} (2)
{±u0}{0} (2)
其中:ρ为量化密度,且满足0 ρ1,u0
ρ1,u0 0。
0。
图1所示为带有量化的网络控制系统结构,图中,量化器1的作用是量化状态信号,量化器2的作用是量化控制输入信号。控制信号可描述为
 (3)
(3)
式中:h为采样周期。
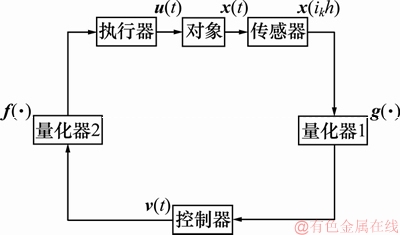
图1 网络系统结构图
Fig. 1 Structure diagram of network system
量化器的映射函数为
 (4)
(4)
其中: ,
, (0,1)。
(0,1)。
令y=x(ikh),f(v(t))和g(x(ik h))满足
 (5)
(5)
假设两者均是对称的,fi(vi)=-fi(-vi),gy(yj)=-gy(-yj) (i=1,2,…,m;j=1,2,…,n)。根据扇形有界条件,有[10]
 (6)
(6)
其中: 和
和 为量化误差,
为量化误差, ≤
≤ ,
, ≤
≤ 。为表述简单方便,令
。为表述简单方便,令 ,
, ,
, ,
, ,并定义
,并定义 和
和 为
为
 (7)
(7)
故f(・) ,g(・)
,g(・) 。
。
 (8)
(8)
将式f(・)和g(・)代入(3)得到量化反馈控制器:
 (9)
(9)
再将式(9)代入式(1),带有量化的网络系统表述为
 (10)
(10)
其中:τk表示从状态采样时刻ikh开始从传感器到执行器收到数据时刻的时滞。定义d(t)=t-ikh,并有系统初始条件x(t)= (t),则式(10)可以改写成
(t),则式(10)可以改写成
 (11)
(11)
其中:d(t)取值范围为0≤h1≤d(t)≤h2;h1和h2分别表示时滞下界与时滞上界;初始状态 (t)为给定的向量值函数。
(t)为给定的向量值函数。
注释1 将复杂的网络控制系统静态量化模型变化成广义时滞系统模型,这样,利用成熟的时滞系统控制方法去分析系统的稳定性将变得较容易。
2 网络系统的稳定性分析
为获取1个网络控制系统的新稳定性判据,引用如下相关引理。
引理1[15-17]给定正定矩阵 ,对于任意可导函数
,对于任意可导函数
 ,有如下不等式成立:
,有如下不等式成立:
 ≥
≥

 ;
;
 ≥
≥ ;
;
 ≥
≥ 。
。
其中:

 ;
;
 ;
;
 ;
;
 ;
;

 ;
;
 ;
;
 ;
;

 。
。
引理2[20]存在常数 (0,1),矩阵X>0,任意矩阵M1,M2和任意向量
(0,1),矩阵X>0,任意矩阵M1,M2和任意向量 ,有如下不等式成立:
,有如下不等式成立:
 ≤
≤
 ;
;
其中: 。
。
在给出主要定理之前,首先令 和h2-h1=h12,并有如下定义:
和h2-h1=h12,并有如下定义:
 ;
;








 ;
;
 ;
;

 ;
;







 i=1, 2, , 14。
i=1, 2, , 14。
定理 给定标量h1和h2,0≤h1≤d(t)≤h2,存在正定对称矩阵P R5n×5n;Q1和Q2R4n×4n;G1,G2,Z1和Z2Rn×n,且存在具有合适维数的任意矩阵N1,N2,M1和M2,有线性矩阵不等式
 <0(12)
<0(12)
 <0(13)
<0(13)
成立,则式(11)是渐近稳定的。式中:


































证明 首先构造全新的增广L-K泛函:
 (14)
(14)
其中:

 +
+



在计算过程中存在如下恒等式:
 (15)
(15)
对V(xt)求导,可得:
 (16)
(16)



 (17)
(17)


 (18)
(18)
 (19)
(19)
不难发现如下恒零等式成立:
 (20)
(20)
 (21)
(21)
对于具有合适维数的任意矩阵N1和N2,有
 (22)
(22)
再基于引理1,将式(18)和(19)中所含的积分项经过简单的代数运算,得
 ≤
≤
 (23)
(23)
最后根据引理2处理式(23)得:
≤ (24)
(24)


其中: ;
; ;i ={1,2}。
;i ={1,2}。
若式(12)和(13)成立,则有Φ≤0,即≤0,由L-K稳定性定理可知网络控制系统(11)渐进稳定。证明完毕。
注释2 与文献[16]中的泛函相比,所构建的全新增广泛函增加了更多的系统状态信息,同时使用了更加有优势的二阶B-L积分不等式与基于函数的辅助型积分不等式相结合的新不等式。仿真实例表明获得的新判据保守性降低。然而,在泛函中,矩阵P,Q,G和Z需要满足正定条件,怎样利用B-L不等式去放松正定限制条件仍有待研究。
3 仿真实例
表1 不同h1下的允许上界h2
Table 1 Admissible upper bound of h2 for different h1
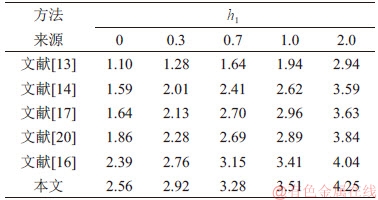
表2 不同h1下的最大允许h2
Table 2 The maximum allowed h2 for different h1

表3 不同δ时的最大允许h2
Table 3 The mximum allowed h2 for different δ

例1 考虑经典时滞系统模型(式(11)),并有如下系统矩阵参数:
 ,
,
 。
。
表1所示为系统无量化时,取不同的h1得到的时滞最大允许上界值h2。由表1可知:当h1分别取0,0.3,0.7,1.0和2.0时得到不同的h2,通过与文献[13-14,16-17,20]中的结果相比较,结果表明由本文方法所得h2有较大提高,这说明所获得的新渐进稳定性判据的保守性明显降低。
例2 考虑文献[21]中的网络采样系统模型:

令δf =δg = 1/3,控制器参数K=-[1.125,1.125]。
表2所示为系统有量化时,将YALMIP程序包加载到MATLAB中后,通过仿真得到不同h1下的最大允许h2。从表2可知:取不同h1时可得到不同有效的h2;在区间[h1,h2]内,带有量化的网络控制系统是渐进稳定的。
表3所示为h1=0.1,控制器参数K不变和取不同的δf =δg=δ时得到的h2最大值。从表3可知:随着δ不断变大,h2最大值越来越小。这一方面说明量化程度对系统稳定性分析非常重要,另一方面说明在保证系统稳定的前提下,量化能够减少网络控制系统的资源占有率。
4 结论
1) 研究了一个网络控制系统静态量化问题。基于L-K稳定性理论,分析了系统的渐进稳定性,用1个结合二阶B-L不等式与基于函数的辅助型2个不等式的新不等式、逆凸方法和含自由权的恒零等式去处理所构造的全新L-K增广泛函,推导出1个新的稳定性判据。
2) 采用MATLAB建立数值实例仿真,仿真结果表明了所建立的渐进稳定性判据具有少保守性和有效性。
3) 文中仅仅研究了网络控制系统中具有无记忆特性静态量化器,对具有记忆特性的动态量化器有待进一步研究。
参考文献:
[1] ZHANG Xianming, HAN Qinglong, YU Xinghuo. Survey on recent advances in networked control systems[J]. IEEE Transactions on Industrial Informatics, 2016, 12(5): 1740-1752.
[2] ZOU Lei, WANG Zidong, HAN Qinglong, et al. Ultimate boundedness control for networked systems with try-once- discard protocol and uniform quantization effects[J]. IEEE Transactions on Automatic Control, 2017, 62(12): 6582-6588.
[3] LEE T H, XIA Jianwei, PARK J H. Networked control system with asynchronous samplings and quantizations in both transmission and receiving channels[J]. Neurocomputing, 2017, 237: 25-38.
[4] SU L, CHESI G. Robust stability of uncertain discrete-time linear systems with input and output quantization[J]. International Federation of Automatic Control, 2017, 50(1): 375-380.
[5] PHAT V N, JIANG Jianming, SAVKIN A V, et al. Robust stabilization of linear uncertain discrete-time systems via a limited capacity communication channel[J]. Systems & Control Letters, 2004, 53(5): 347-360.
[6] TSUMURA K, ISHII H, HOSHINA H. Tradeoffs between quantization and packet loss in networked control of linear systems[J]. Automatica, 2009, 45(12): 2963-2970.
[7] LIU Jinliang, WEI Lili, XIE Xiangpeng, et al. Quantized stabilization for T-S fuzzy systems with hybrid-triggered mechanism and stochastic cyber-attacks[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(6): 3820-3834.
[8] ZHOU Jing, WEN C Y, YANG Guanghong. Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal[J]. IEEE Transactions on Automatic Control, 2014, 59(2): 460-464.
[9] 刘英英. 基于LMI技术的网络控制系统的稳定性分析与综合[D]. 沈阳: 东北大学信息科学与工程学院, 2011: 75-94.
LIU Yingying. LMI-based approaches to stability analysis and synthesis for networked control systems[D]. Shenyang: North Eastern University. College of Information Science and Engineering, 2011: 75-94.
[10] FU Minyue, XIE Lihua. The sector bound approach to quantized feedback control[J]. IEEE Transactions on Automatic Control, 2005, 50(11):1698-1711.
[11] ZENG Hongbing, HE Yong, WU Min, et al. Free-matrix based integral inequality for stability analysis of systems with time-varying delay[J]. IEEE Transactions on Automatic Control, 2015, 60(10): 2768-2772.
[12] 陈刚, 王信, 肖伸平, 等. 具有混合时变时滞主从神经网络的指数采样同步控制[J]. 中南大学学报(自然科学版), 2018, 49(6): 1432-1439.
CHEN Gang, WANG Xin, XIAO Shenping, et al. Sampled-data exponential synchronization of master-slave neural networks with time-varying mixed delays[J]. Journal of Central South University(Science and Technology), 2018, 49(6): 1432-1439.
[13] PARK P, KO J W, JEONG C. Reciprocally convex approach to stability of systems with time-varying delays[J]. Automatica, 2011, 47(1): 235-238.
[14] SEURET A, GOUAISBAUT F. Wirtinger-based integral inequality: application to time-delay systems[J]. Automatica, 2013, 49(9): 2860-2866.
[15] SEURET A, GOUAISBAUT F. Stability of linear systems with time-varying delays using Bessel-Legendre inequalities[J]. IEEE Transactions on Automatic Control, 2018, 63(1): 225-232.
[16] LIU Kun, SEURET A, XIA Yuanqing. Stability analysis of systems with time-varying delays via the second-order Bess-el- Legendre inequality[J]. Automatica, 2017, 76: 138-142.
[17] PARK P, LEE W I, LEE S Y. Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems[J]. Journal of the Franklin Institute, 2015, 352(4): 1378-1396.
[18] 张先明, 吴敏, 何勇. 线性时滞系统的时滞相关稳定性新判据[J]. 中南大学学报(自然科学版), 2004, 35(3): 438-442.
ZHANG Xianming, WU Min, HE Yong. New criteria on delay-dependent stability for linear systems with delay[J]. Journal of Central South University of Technology(Science and Technology), 2004, 35(3): 438-442.
[19] CHEN Yun, CHEN Gang. Stability analysis of systems with time-varying delay via a novel Lyapunov functional[J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(4): 1068-1073.
[20] SEURET A, LIU K, GOUAISBAUT F. Generalized reciprocally convex combination lemmas and its application to time-delay systems[J]. Automatica, 2018, 95: 488-493.
[21] ZENG Hongbing, TEO K L, HE Yong. A new looped-functional for stability analysis of sampled-data systems[J]. Automatica, 2017, 82: 328-331.
(编辑 陈灿华)
收稿日期: 2018 -12 -06; 修回日期: 2019 -02 -15
基金项目(Foundation item):湖南省自然科学基金资助项目(2018JJ4075);国家自然科学基金资助项目(61703153) (Project(2018JJ4075) supported by the Natural Science Foundation of Hunan Province; Project(61703153) supported by the National Natural Science Foundation of China)
通信作者:王炜,副教授,从事电力系统和网络控制系统研究;E-mail: wangwei9804@163.com

