DOI: 10.11817/j.issn.1672-7207.2015.09.046
��絥Ԫ�����¯Э�������Կ��ſ���
�����������������
(�廪��ѧ ���ܹ���ϵ������ϵͳ�����ص�ʵ���ң�������100084)
ժҪ����Ի�絥Ԫ�����¯Э��ϵͳ���ձ���ڵ�ǿ��ϡ�����ʱ�䡢��Χ�乤�����е�������������Կ��ſ��Ʒ��������ȣ��������Կ��ƽṹ����ϵͳ�ӽ���������ƽ�⣬���ϵͳ����ڿ����Ժ��ȶ���֮���ì�ܡ��ڴ˻����ϣ�����Կ��ſ�������ϵͳ�е��Ŷ�����ȷ���ԵȽ��й��ƺͲ�����ʹ����ϵͳ���н�ǿ�Ŀ����������ͶԻ���乤�����е�����Ӧ����������ʵ�ʿ���Ҫ�����趨ֵ����ʵ�顢�����Ŷ�ʵ�顢�乤��ʵ������ؿ���ʵ�顣�о��������������Ʒ����ۺ����Կ��ƽṹ���Կ��ſ��������ŵ㣬�������õĿ���Ʒ�ʺͺ�ǿ������³���ԡ�
�ؼ��ʣ���絥Ԫ�����¯�����Կ��ƣ��Կ��ſ��ƣ����ؿ���ʵ�飻³����
��ͼ����ţ�TK323 ���ױ�־�룺A ���±�ţ�1672-7207(2015)09-3503-10
Flexible active disturbance rejection control for boiler�Cturbine unit
DONG Junyi, SUN LI, LI Donghai
(State Key Laboratory of Power Systems, Department of Thermal Engineering, Tsinghua University,
Beijing 100084, China)
Abstract: Considering that the boiler�Cturbine unit, which has strong coupling, large inertia and parameter uncertainties, is a critical part to the modern power plant, a novel flexible active disturbance rejection control scheme for a boiler-turbine system was presented. Firstly, a flexible structure was utilized to achieve the energy feed-demand balance, which can improve the dispatch rate while keep the steam pressure stable at the same time. Secondly, the active disturbance rejection controller was applied to estimate and actively compensate the disturbances, the parameter uncertainties as well as the unmodeled dynamics in the system. Simulations were conducted under different operating conditions. The results show that the proposed control scheme illustrates the advantages of flexible structure and active disturbance rejection controller, and has excellent performance and strong robustness.
Key words: boiler�Cturbine unit; flexible control; active disturbance rejection controller; Monte Carlo experiment; robustness
��絥Ԫ�����¯Э��ϵͳ��һ�����ӵĶ����ϵͳ�����д���ԡ�ǿ��ϡ�����ʱ����ص㣬������Ч���ƶ�ʵ�ֵ������Զ����������ش�¯Э�����Ƶ���ҪĿ������������Ը��ɵ�����ͬʱά�ֻ������в����ȶ�[1]��Ȼ������¯������������ת�������е��ٶ����ϴ���ϵͳ����ڿ����Ժ��ȶ���֮����ڹ���ì�ܣ���ˣ���¯Э������һֱ�ǵ�Ԫ��������е����⡣Ŀǰ��������ܶ�ѧ�߶Ի�¯Э�����ƽ������о�������Щ�о��У���Ȼʹ�õĿ����㷨���죬�����Ʒ�������ƴ��·�Ϊ2�ࣺ��1�����ģ�ͽ������Ի�������������Կ�������Hamed��[2]��ģ�ͷ������Ի��Ļ��������PI��������Chen��[3]�������ԵĻ�¯Э��ϵͳת��Ϊһ�������������ϵͳ�����״̬������������Jalali��[4]���ö�ģ�Ϳ��ƣ����ھֲ����Ի�ģ�����һ��PI����������2������÷����Կ�����������¯Э��ϵͳ�еķ����Ի��ڡ�Fang��[5]���ڷ��ݷ���Ʒ���������Ӧ��������Yang��[6]�������1������ʱ�������Ŀ�����ʹ״̬�������������Ե��趨ֵ��Ȼ�����ϵͳ�еķ����ԺͲ�ȷ�����������Ӧ��������Li��[1, 7-8]����TSģ��ģ�����ƽ���¯Э��ϵͳ�Ķ�̬���ԣ��ֱ���ƻ����Ŵ��㷨��ģ��Ԥ������������ڵ���ѧϰ��ģ��Ԥ��������Լ�H��������״̬�������ٿ��������������Ʒ�����Ȼ�����˻�¯Э��ϵͳ�Ŀ���Ʒ�ʣ��������ɱ���ش���һЩ�ˣ�����������ȷģ�͡����ƽṹ���ӡ�����������ʱ�䳤��[9]����Щȱ���������������Ʒ����Ĺ���Ӧ�á���Ԫ����ı�����ʵ�������Լ�������ת�����ڴ��ʵ�[10]����������ĽǶȷ����˻�¯Э��ϵͳ�Ķ�̬���ԣ�ָ��������Ӧ���㵼������ѹ����������������Ӧ�������¸�����Ӧ�Խϲ���������ͨ�����Խṹ����ϵͳʵ�����������ƽ�⡣���������Խṹ�Ŀ���£�Ϊ��¯Э��ϵͳ����Կ��ſ�����(active disturbance rejection controller, ADRC)������߿���ϵͳ�Ŀ�����������³�����Լ��Ի���乤�����е�����Ӧ�������Կ��ſ��������нṹ���������ڶ���ȷģ�͡�³����ǿ���ص㡣ADRC�ĺ����ǽ����ض����еķ����ԡ����š���ȷ���Եȿ�������״̬���й��ƣ��������ɿ�����������[11]����־��[12]֤����ADRC������״̬�н�ʱ�������ԣ�Yang��[13]������ADRC���Թ��Ƶ��Ŷ���Χ��Ϊ�˱���ADRC�Ĺ���Ӧ�ã�Gao[14]��ADRC��Ϊ������ʽ������˻��ڴ����IJ�������������ʹADRC�IJ����������ڼ����С�Ŀǰ��ADRC�ѱ����ڿ�������ͬ�����[15]��������������[16]�ȣ�ȡ�������õĿ���Ч������ʾ��ADRC��ʵ��Ӧ���еķ�չǰ��������������ij300 MWȼúֱ��¯���Ȼ�����100%���ɹ����㴦�����Ի�ģ��Ϊ���ض�����������Կ��ſ��Ʒ��������ȣ���ʱ�����������ֵ����ָ����Ϊ���۱���ѡȡ�����������ӣ�ʹϵͳ�ӽ�����������ƽ�⣬�����������Ժ��ȶ���֮���ì�ܡ��ڴ˻����ϣ����Կ��ſ�������ϵͳ�е��Ŷ���δ��ģ��̬�Ƚ��й��ƺͲ�����ʹ����ϵͳ���н�ǿ�Ŀ�����������³���ԣ�������100%������ƵĿ���������70%����������������Ա乤�����е���Ӧ������
1 ��¯Э��ϵͳ���Կ��ƽṹ
��絥Ԫ�������Ҫ�����ǽ�ȼ�ϵĻ�ѧ��ת��Ϊ���ܲ������������ͼ1��ʾΪ��Ԫ�����ʾ��ͼ��ͼ1�У�uBΪȼ���ʣ�uTΪ�������ſ��ȣ�NEΪ����ʵ���繦�ʣ�PTΪ��ǰ����ѹ������¯Э�����Ƶ���ҪĿ��������������Ը��������ͬʱά������ѹ�����ȶ�����ˣ�ͨ����Э������ϵͳ���Ϊ��uB��uTΪ���룬NE��PTΪ�����ϵͳ��Ŀǰ����¯Э�����Ƴ��õIJ����л��ڡ�����¯����Э�����ƺͻ��ڡ�¯��������Э�����ơ�ǰ�߿�ά������ѹ�������й����д�������ȶ�״̬����������Ӧ�Բ�������ʹ������ӦѸ�٣�������ѹ�������ϴ�����ת���ĽǶȿ�����¯�����ڰ�������Ի��ڣ�����ת���ٶȽ����������ܶࡣ��¯������������ת���ٶ��ϵIJ��쵼���������費ƽ�⣬ʹ��ϵͳ����ڿ����Ժ��ȶ���֮�����ì��[10]�����ڴˣ��ڴ��ʵ�[10]������Կ��ƽṹ��ͨ���Բ�ͬ�ٶȵ�����ת�����̽���Э����Ѱ���¯�����������������ƽ�⡣ͼ2��ʾΪ���Կ��ƽṹ��ʾ��ͼ[10]��ͼ2�У�NS�� PS�ֱ��ʾ���ʻ�·��ѹ����·���趨ֵ���������źź���ѹ�ź��Լ�Ȩ��ʽͬʱ�����¯����������������������ͨ������(��Ȩϵ��)�ֱ�Ϊ ��
�� (
( ��������)��
��������)�� ��
�� ����֪����=0ʱ��KB1=0��KB2=1��KT1=1��K T2=0���������з�ʽΪ���ڡ�����¯����Э�����ƣ�ϵͳ��������ӦΪ����Ŀ�ꣻ��=1ʱ��KB1=1��KB2=0��KT1=0��K T2=1���������з�ʽΪ���ڡ�¯��������Э�����ƣ�ϵͳ����������Ϊ����Ŀ�ꣻ��
����֪����=0ʱ��KB1=0��KB2=1��KT1=1��K T2=0���������з�ʽΪ���ڡ�����¯����Э�����ƣ�ϵͳ��������ӦΪ����Ŀ�ꣻ��=1ʱ��KB1=1��KB2=0��KT1=0��K T2=1���������з�ʽΪ���ڡ�¯��������Э�����ƣ�ϵͳ����������Ϊ����Ŀ�ꣻ�� ʱ������Э�������ԡ�����¯��Ϊ��������Ŀ�����ؿ���������������
ʱ������Э�������ԡ�����¯��Ϊ��������Ŀ�����ؿ��������������� ʱ������Э�������ԡ�¯������Ϊ��������Ŀ�����ؿ�������������ˣ�ΪЭ������������������ӣ������е�������ʹ����ӽ���������ƽ�⡣������������ƽ��Ļ��飬�Ⱦ��н�ǿ�ĸ��ɸ������������ܱ�֤����ѹ���ڽ�С��Χ�ڲ�����
ʱ������Э�������ԡ�¯������Ϊ��������Ŀ�����ؿ�������������ˣ�ΪЭ������������������ӣ������е�������ʹ����ӽ���������ƽ�⡣������������ƽ��Ļ��飬�Ⱦ��н�ǿ�ĸ��ɸ������������ܱ�֤����ѹ���ڽ�С��Χ�ڲ�����

ͼ1 ��Ԫ����ʾ��ͼ
Fig. 1 Diagram of boiler�Cturbine unit
2 �Կ��ſ��������
��Ԫ����������ӵ�����ת�����̣����ں�ǿ�IJ�ȷ���ԣ�����Ҫ���ݵ�������为�����С������Խṹ�Ļ����ϣ�ѡ�ò���������ȷģ�ͣ�³����ǿ��ADRC��Ϊ��¯�������Ŀ��������õ������Կ��ſ��Ʒ�������ṹ��ͼ3��ʾ�����У�ud1�� ud2�ֱ�ģ����ܴ��ڵĹ�¯�����������Ŷ���
2.1 �Կ��ſ�����ԭ��
����¯Э��ϵͳ��������Ϊu1��u2��������Ϊy1��y2������ϵͳ�д���δ֪��ʽ���Ŷ�ud1�� ud2, ��ϵͳ�������´��ݺ��������ʾ��

��ʧһ���ԣ���

���� ��
�� ��
�� ��ģ�Ͳ����ͽ״�Ϊδ֪����Gd1(s)��Gd2(s)�ı���ʽ��ʽ(2)����ͬ������ϵͳ�ĵ�1����·����ʽ�ɵã�
��ģ�Ͳ����ͽ״�Ϊδ֪����Gd1(s)��Gd2(s)�ı���ʽ��ʽ(2)����ͬ������ϵͳ�ĵ�1����·����ʽ�ɵã�

�� ���Ը�ʽ����������˹���任�õ�
���Ը�ʽ����������˹���任�õ�



ͼ2 ��Ԫ�������Կ��ƽṹʾ��ͼ
Fig. 2 Diagram of flexible control for boiler-turbine unit

ͼ3 ��¯Э�������Կ��ſ��ƽṹͼ
Fig. 3 Diagram of flexible ADRC for boiler-turbine unit
��������������k��1������k�ػ���[17]��

��ʽ�еȺ����˽���n-1�ػ��ֵ�


���� (n=1, 2, ��)��
(n=1, 2, ��)�� (m=1, 2, ��)�ֱ�Ϊan��cm���ֺ��ϵ����
(m=1, 2, ��)�ֱ�Ϊan��cm���ֺ��ϵ����
��ʽ���еȼ۱任��



����ģ�Ͳ����ͽ״ξ�Ϊδ֪������ Ϊϵͳ�ڲ���δ֪��̬��ͬ������
Ϊϵͳ�ڲ���δ֪��̬��ͬ������ ��
�� �����ֱ��ʽ(6)��(7)����������˹���任����ADRC����£�����Ҫ֪����Ϻ��ŵľ���ʱ����ʽ��ֻ���������ʽ��
�����ֱ��ʽ(6)��(7)����������˹���任����ADRC����£�����Ҫ֪����Ϻ��ŵľ���ʱ����ʽ��ֻ���������ʽ��

��ʽ���Ϊ

�����Ե�����ԭ����


�� ��Ϊϵͳ������״̬���������ϵͳ�ڲ���δ֪��̬����·������
��Ϊϵͳ������״̬���������ϵͳ�ڲ���δ֪��̬����·������ �Լ��Ŷ�
�Լ��Ŷ� ����֪����״̬f1(t)Ϊδ֪��������״̬����
����֪����״̬f1(t)Ϊδ֪��������״̬���� ������״̬����
������״̬���� ��Ҫ��
��Ҫ�� Ϊ�ɲ�����
Ϊ�ɲ����� ����һ��������������ʽ�ɱ�ʾΪ
����һ��������������ʽ�ɱ�ʾΪ

Ϊ�˻������Ϣ��Gao��[14]�������״̬�۲���(extended state observer, ESO)������ѧ����ʽΪ

���� ��
�� Ϊ�۲�����������ESOȷ����ʱ��
Ϊ�۲�����������ESOȷ����ʱ�� ��
�� ���ֱ����
���ֱ���� ����ʽ��ʾ�Ķ�����ƿ�����Ϊ
����ʽ��ʾ�Ķ�����ƿ�����Ϊ

����ʽ��, ��ESOȷ����ʱ����

���ˣ�����δ֪��̬����ϡ��Ŷ�������״̬�ڱ�ESO���ƺ��ɿ����ʽ��в��������ض���ת��Ϊһ�����ֻ��� ���û��ֻ�����Ʊ���������Ϊ
���û��ֻ�����Ʊ���������Ϊ

���У�r1(t)Ϊ�ο����롣����ʽ�Ϳɵñջ��ַ��̣�

��Ӧ�ıջ����ݺ���Ϊ

���������Ƶ����̣�����ADRC�Ľṹͼ��ͼ4��ͬ������Ϊ��2����·����Կ��ſ�������
2.2 �Կ��ſ�����������������
���ͼ4��ʾ�������ṹ��Gao[14]��������ĸ����kpת��Ϊ���������� �ĺ���������ת��Ϊ�۲��������ĺ�������
�ĺ���������ת��Ϊ�۲��������ĺ�������
 ��
�� ��
��

ͼ4 �Կ��ſ������ṹ
Fig. 4 Diagram of ADRC structure
���ˣ�ADRC��3��������Ҫ�������ֱ��� ����b0����3��������ʵ��������������ѭ���¹��ɣ�
����b0����3��������ʵ��������������ѭ���¹��ɣ�
1)Խ��ESO�Ĺ۲�����Խǿ����������ӹ۲����������������ԡ���ˣ�Ӧ��1����С��ֵ������ֱ���۲⾫������Ҫ��Ϊֹ��
2)Խ��b0ԽС����������Խǿ��ϵͳ�����ӦԽ�죬����������Խ���ء�
��ͨ������£�����ݾ���Ŀ���Ҫ�������b0���е�����ʹϵͳ�Ķ���̬���ܴﵽ���š�
3 �����о�
��ij300 MWȼúֱ��¯���Ȼ���Ϊ�о����������[18]�����˸û�����100%���ɹ����㴦�����Ի����ݺ�������


���ȣ���ϵͳ�Ŀ�����̬���Խ��з�����ͼ5��ʾΪ�ö���Ŀ�����λ��Ծ��Ӧ���ߡ�

ͼ5 ��¯Э��ϵͳ������λ��Ծ��Ӧ����
Fig. 5 Open-loop step responses of boiler-turbine unit
��ͼ5��֪����¯Э��ϵͳ����·֮�������ϣ���ȼ����ָ����������ſ���ָ��ĸı�������������ʺ�����ѹ��ͬʱ�����仯�����⣬��¯�������ڴ���Ի��ڣ���̬��Ӧ�ٶȽ�������103 s���������ܴﵽ�ȶ����ô���Ի��ڵĴ��ڽ�ʹϵͳ���ȶ��Խ��ͣ���̬��ӦƷ���½��������ѶȼӴ�[19]��
��������������Ϊ��¯Э��ϵͳ��������Կ��ſ��Ʒ���������Ŀ����ʹϵͳ��������Ҫ��
1) ��������ܿ�����Ӧ�����Ը��ɵ�����
2) ���ɱ仯ʱ����ǰ����ѹ�������ȶ�����������С��Χ�ڲ�����
3) ϵͳ�����ȶ�������ʱ���������ܹ���Ч������ϵͳ�еĸ����Ŷ���
4) �����Χ�乤��ʱ�����������㹻ǿ��³����ά��ϵͳ�ȶ���
3.1 ��������ȷ��
ʹ���ʻ�·���趨ֵNs����15 WM (5%����)�������Ծ�仯��������������(0 1)��ȡֵ��ȡֵ����Ϊ0.1, ��Ӧ��ϵͳ�����������������ͼ6��ͼ7��ʾ��
��ͼ6��ͼ7�ɼ�������������ȡ��ֵͬʱ��ϵͳ�������Ӧ�Ϳ�����ָ�����������졣Ϊ��ѡȡ���ŵ��������ӣ�������·��ITAE֮����Ϊ�������۱���ITAE���ϵͳ��Ӧ�Ŀ����Ժ��ȶ��ԣ������ʽΪ


ͼ6 ϵͳ�����Ӧ����
Fig. 6 Output responses of system to setpoint change

ͼ7 ����������
Fig. 7 Curves of control input
���У�e(t)Ϊ�趨ֵ�����ֵ���� Ϊ����ʱ�䡣��1��ʾΪ��������ȡ��ֵͬʱϵͳ��ITAE��
Ϊ����ʱ�䡣��1��ʾΪ��������ȡ��ֵͬʱϵͳ��ITAE��
��1 ����ϵͳ����ָ��
Table 1 Performance indexes of control system
��ͼ6��ͼ7����1��֪��
1) ��=0ʱ�����������Ӧ��Ѹ�٣�������ѹ���������
2) �� ʱ�����������������Ӧ������ѹ���ɸ�����Ϊ�������������������ҡ�
ʱ�����������������Ӧ������ѹ���ɸ�����Ϊ�������������������ҡ�
3) ��=0.5ʱ��ϵͳ����Ķ�̬������
4) �� ʱ�����������������Ӧ�ȱ��������ѹ������������С������������ƽ����
ʱ�����������������Ӧ�ȱ��������ѹ������������С������������ƽ����
5) ��=0.8ʱ������·ITAE��С��ϵͳ�������˿����Ժ��ȶ��ԣ��ӽ�����������ƽ�⡣
6) ��=1.0ʱ�����������Ӧƽ��������ѹ��������С��
��ˣ�ѡȡ=0.8Ϊ�����������ӣ���Ӧ��ADRC��������2��
��2 ����������
Table 2 Controller parameters

3.2 �����Ŷ�ʵ��
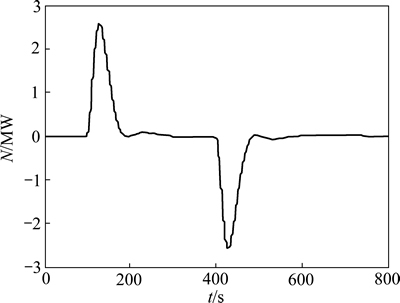
��ϵͳ���ڶ�����£���t =100 sʱΪȼ����ָ��uB���뷽���Ŷ�d1=10 t/h������ʱ��300 s����ģ�����Թ�¯��ĸ��š�ͼ8��ʾΪ���������Ŷ�ʱ���ʻ�·������״̬���ߣ�ͼ9��ͼ10��ʾ�ֱ�Ϊ���ʻ�·������ߺͿ��������ߡ�
��ͼ8~10��֪����ȼ����ָ���ܵ������Ŷ�ʱ��ESO�ܶ������Ŷ����ڵ�����״̬������Ч���ơ��ڴ˻������ɿ����ʶԸù��������в�������ʹADRC���к�ǿ�ĵֿ������Ŷ�����������֤�������ָ��ȶ�״̬��

ͼ8 ADRC������״̬����
Fig. 8 Curves of extended state in ADRC
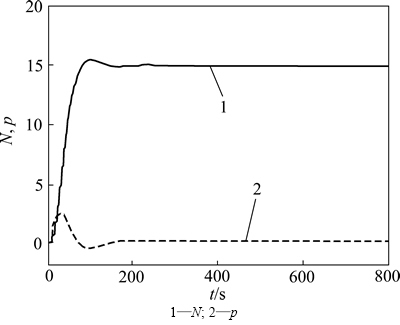
ͼ9 �������ϵͳ���������Ӧ����
Fig. 9 Output response curve at full power

ͼ10 �������ϵͳ����������
Fig. 10 Control input curve at full power
3.3 �乤��ʵ��
��Ԫ��������й�����Ҫ���ݵ����Ը��ɵ����������Ӧ������������õĿ���ϵͳӦ�ܱ�֤�����ڴ�Χ�乤��ʱά���ȶ����С����������������⣬70%�����ǵ�Ԫ�������һ�����������㡣�����о���ij300 MWȼúֱ��¯���Ȼ�����70%���ɵ㴦�����Ի����ݺ�������Ϊ[18]

����Բ�ͬ�����ֱ���ƿ�������������������˿���ϵͳ�ĸ����ԣ�������Ҫ��������л������⡣���ǵ�ADRC�������ڶ���ȷģ�ͣ�������100%���������Ŀ�����ֱ������70%�����������У���t=0 sʱΪ���ʻ�·���������Ծ�趨ֵNs=15 MW��ϵͳ�����Ӧ����������������ͼ11��12��ʾ��
ͼ11 70%�����������Ӧ����
Fig. 11 Output responses at 70% of full power

ͼ12 70%�����¿���������
Fig. 12 Control inputs at 70% of full power
��ͼ11��12�ɼ������ʻ�·����ƽ�ȵظ����趨ֵ�ı仯����ǰ����ѹ���ڽ�С��Χ�ڲ������������仯ƽ������������֪����100%������ƵĿ���������70%����ʱ��Ȼ��������õĿ���Ч������ԭ�����ڱ乤��������ģ������Ϊ����״̬��������Ч���ƣ�Ȼ���ɿ������������Ӷ�ʹADRC���н�ǿ����Ӧ��Χ�乤����������
3.4 ���ؿ���ʵ��
�������ؿ���ԭ��[20]��ʹ��¯Э��ϵͳ��ģ�Ͳ�������ڱ��ֵ������10%������㶯��������������Ϊ500�ı��ض����� ����ģ����ܴ��ڵĽ�ģ����ģ�Ͳ�����ȷ���Եȡ�����2�еĿ������������������з���ʵ�飬ͨ��������������¿���ָ�����ɢ�̶Ⱥ����������ڶ�����ڲ�ȷ����ʱ��³���ԡ�����أ����и����ض���Ĺ��ʻ�·���������Ծ�趨ֵNs=15 MW��2�ֹ�����ϵͳ���ؿ���ʵ�����ֱ���ͼ13��ͼ14��ʾ��
����ģ����ܴ��ڵĽ�ģ����ģ�Ͳ�����ȷ���Եȡ�����2�еĿ������������������з���ʵ�飬ͨ��������������¿���ָ�����ɢ�̶Ⱥ����������ڶ�����ڲ�ȷ����ʱ��³���ԡ�����أ����и����ض���Ĺ��ʻ�·���������Ծ�趨ֵNs=15 MW��2�ֹ�����ϵͳ���ؿ���ʵ�����ֱ���ͼ13��ͼ14��ʾ��
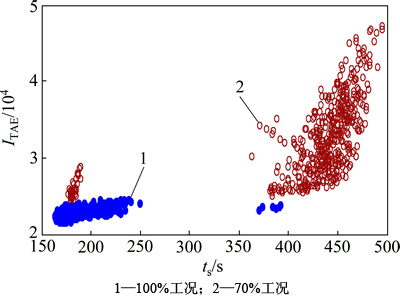
ͳ�����ؿ���ʵ���й��ʻ�·�ĵ���ʱ��ts��ϵͳITAE����ֲ���ͼ15��ʾ��
ͼ15�У���ά�ռ�����ֱ��ʾ����ʱ��ts��ITAE��ʵ�ĺͿ��ĵ㼯�ֱ�Ϊ100%������70%�������㶯ϵͳ������ָ��ֲ����㼯��ԭ��Խ��������ϵͳ����Խ�ã�Խ�ܼ�������³����Խǿ���ɼ�������ƿ��Ʒ�������2������ʱ�������к�ǿ������³���ԡ����ڸÿ���������Ϊ����100%����ģ�������IJ�������ˣ���������100%�����µ�����³���Ա�70%�����µ�³����ǿ��

ͼ13 �����ɹ��������ؿ���ʵ����
Fig. 13 Monte-Carlo experiment results at full power

ͼ14 70%���ɹ��������ؿ���ʵ����
Fig. 14 Monte-Carlo experiment results at 70% of full power
ͼ15 �㶯ϵͳ����ָ��ֲ�
Fig. 15 Distribution of performance index
4 ����
1) Ϊij300 MWȼúֱ��¯���Ȼ�����������Կ��ſ��Ʒ��������з����о������ȣ���ITAEΪ���ۻ�ȷ�������������ӣ�ʹ��¯Э��ϵͳ�ӽ���������ƽ�⣬Ȼ������Կ��ſ�������ϵͳ�е��Ŷ�����ȷ���Ե����ؽ�����Ч���ƺͲ������Ի�¯Э��ϵͳ���������Ŷ�ʵ�顢�乤��ʵ������ؿ���ʵ�顣
2) �����Կ��ſ��Ʒ����ۺ������Կ��ƽṹ���Կ��ſ��������ŵ㣺�ṹ�������ϵͳ��������Ժ��ȶ���֮���ì�ܣ�������Ч�����������Ŷ����ڴ�Χ�乤����ģ�Ͳ������ڲ�ȷ����ʱ���к�ǿ������Ӧ������³���ԡ��÷�����������õĿ���Ʒ�ʣ����й���Ӧ�ü�ֵ��
�ο����ף�
[1] LI Yiguo, SHEN Jiong, Lee K Y, et al. Offset-free fuzzy model predictive control of a boiler-turbine system based on genetic algorithm[J]. Simulation Modelling Practice and Theory, 2012, 26(1): 77-95.
[2] Hamed M, Aria A, Gholamreza V. Nonlinear dynamics and control of bifurcation to regulate the performance of a boiler-turbine unit[J]. Energy Conversion and Management, 2013, 68(1): 105-113.
[3] Chen P. Multi-objective control of nonlinear boiler-turbine dynamics with actuator magnitude and rate constraints[J]. ISA transactions, 2013, 52(1): 115-128.
[4] Jalali A A, Golmohammad H. An optimal multiple-model strategy to design a controller for nonlinear processes: A boiler-turbine unit[J]. Computers & Chemical Engineering, 2012, 46(1): 48-58.
[5] FANG Fang, WEI Lei. Backstepping-based nonlinear adaptive control for coal-fired utility boiler�Cturbine units[J]. Applied Energy, 2011, 88(3): 814-824.
[6] YANG Shizhong, QIAN Chunjiang, DU Haibo. A genuine nonlinear approach for controller design of a boiler-turbine system[J]. ISA transactions, 2012, 51(3): 446-453.
[7] LIU Xiangjie, KONG Xiaobing. Nonlinear fuzzy model predictive iterative learning control for drum-type boiler-turbine system[J]. Journal of Process Control, 2013, 23(8): 1023-1040.
[8] WU Jie, Nguang S K, SHEN Jiong, et al. Robust H�� tracking control of boiler-turbine systems[J]. ISA Transactions, 2010, 49(3): 369-375.
[9] TAN Wen, FANG Fang, TIAN Liang, et al. Linear control of a boiler-turbine unit: Analysis and design[J]. ISA Transactions, 2008, 47(2): 189-197.
[10] �ڴ���, ��һ��, ������. ��絥Ԫ��������Կ���[J]. �й��������ѧ��, 2002, 22(7): 129-133.
YU Daren, WENG Yiwu, WANG Zhongqi. A study flexible control method for boiler-turbine units[J]. Proceedings of the CSEE, 2002, 22(7): 129-133.
[11] ��Ԫ��, �ƻ���, ������. ��ȷ��ʱ��ϵͳADRC����[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2003, 34(1): 383-385.
XIA Yuanqing, HUANG Huanpao, HAN Jingqing. ADRC control of uncertain systems with time-delay[J]. Journal of Central South University (Science and Technology), 2003, 34(1): 383-385.
[12] ��־��. �������Կ��ſ��Ƶ�������[D]. �Ϸ�: �й���ѧ������ѧ��ѧϵ, 2012: 57-60.
ZHAO Zhiliang. Convergence of nonlinear active disturbance rejection control[D]. Hefei: University of Science and Technology of China. Department of Mathematics, 2012: 57-60.
[13] YANG Xiaoxia, HUANG Yi. Capabilities of extended state observer for estimating uncertainties[C]// Proceedings of the American Control Conference. St Louis, United States, 2009: 3700-3705.
[14] GAO Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]// Proceedings of the American Control Conference. Denver, United States, 2006: 4989-4996.
[15] ������, ��˫��, ����ǿ, ��. �����Կ��ż���������ͬ��������ٷ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(1): 376-379.
LONG Xiaojun, YU Shuanghe, YANG Zhenqiang, et al. Speed regulation of permanent magnet synchronous motor based on active disturbance rejection control[J]. Journal of Central South University (Science and Technology), 2011, 42(1): 376-379..
[16] ������, ͯ����, ����, ��. �������������ʵ�ð��Ž������[J]. ����������Ӧ��, 2012, 29(11): 1471-1478.
WANG Lijun, TONG Chaonan, LI Qing, et al. A practical decoupling control solution for hot strip width and gauge regulation based on active disturbance rejection[J]. Control Theory & Applications, 2012, 29(11): 1471-1478.
[17] WANG Qingguo, HUANG Bin, GUO Xin. Auto-tuning of TITO decoupling controllers from step tests[J]. ISA Transactions, 2000, 39(4): 407-418.
[18] ����, ��ѧ��, ���, ��. ��絥Ԫ�����¯Э���Կ��ſ���[J]. ����������Ӧ��, 2001, 18(1): 149-152.
LIU Xiang, JIANG Xuezhi, LI Donghai, et al. Coordinated auto-disturbance-rejection control for boiler-turbine unit[J]. Control Theory and Applications, 2001, 18(1): 149-152.
[19] ������, ���. һ�����ʽ������ϵͳ���Կ��ſ���[J]. �й���ѧ������ѧѧ��, 2012, 42(5): 391-397.
ZHANG Yuqiong, LI Donghai. Active disturbance rejection control on a bubbling fluidized bed[J]. Journal of University of Science and Technology of China, 2012, 42(5): 391-397.
[20] WANG Chuanfeng, LI Donghai, LI Zheng, et al. Optimization of controllers for gas turbine based on probabilistic robustness[J]. Journal of Engineering for Gas Turbines and Power, 2009, 131(5): 054502.1-054502.5.
(�༭ �²ӻ�)
�ո����ڣ�2014-09-21�������ڣ�2014-11-12
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51176086) (Project(51176086) supported by the National Natural Science Foundation of China)
ͨ�����ߣ��������ʿ�������ڣ������Կ��ſ������ۼ��ȹ��Զ����о���E-mail: lidongh@mail.tsinghua.edu.cn

