DOI: 10.11817/j.issn.1672-7207.2019.04.013
���ᳵ�����ż�������̨�Ľ������ʵ���о�
����1, 2���Թ���1������1
(1. �������̼�����ѧ ��е����ѧԺ������ ���£�123000;
2. ��������ҵ��ѧ ���繤��ѧԺ, ������ ������, 150001)
ժҪ��Ϊ�о����ᳵ���ֱߺʹ����ŵĹ������ԺͿɿ��ԣ�ģ�����ᳵ����ʵ�ʹ��������ڶ��ε��ڼ�����������ģ���������̨�������������̨����ת�ٺ����ת�ش��ڵ���ϸ������⣬����ϵͳ���ݺ������������ݺ���֮��ĶԽǾ������öԽǾ����ϵͳ���н�����ƣ�ͨ������ģ���������̨������ϸ���ʵ�鼰�������ʵ�顣�о����������ͨ���ԽǾ��������̨���н�����ƣ�����Ч�������ת�ٺ����ת��֮�����ϸ������⣬��ʵ��������ת������С78%���������ת������С67%���ֱ����ת������С29%����������������̨�ɿ��ԣ���ʹ����̨���㳵�����ŵĶ�̬ģ�����ʵ��������о������Ϊ������������̨����Ƽ�ģ�����ʵ���ṩһ����ʵ�������
�ؼ��ʣ����ᳵ���������ţ�����̨��������ƣ�ģ�����
��ͼ����ţ�TH113; TP302 ���ױ�־�룺A ���±�ţ�1672-7207(2019)04-0854-10
Experimental study on decoupling control for wheel-bridge simulated test bench of multiaxial vehicles
WANG Hui1, 2, ZHAO Guochao1, JIN Xin1
(1. School of Mechanical Engineering, Liaoning Technical University, Fuxin 123000, China;
2. School of Mechanical and Electronic Engineering, Harbin Institute of Technology, Harbin 150001, China)
Abstract: In order to study the working characteristics and reliability of multiaxial vehicles' wheel-bridge, the actual working conditions of the four-axle vehicle were simulated and the wheel-bridge simulated loading test bench was established based on the secondary regulation technology. In view of the coupled interference problem between the driving speed and output torque of wheel-bridge test bench, the system transfer function was established, and the diagonal matrix between the transfer functions was solved. The diagonal matrix was used to decoupling the system and the coupled interference experiment and decoupling control experiment were carried out by the wheel-bridge test bench. The results show that the decoupling control of the test bench by the diagonal matrix can effectively solve the coupled interference problem between the driving speed and the output torque. In this test, the drive speed error is reduced by 78%, the secondary output torque error is reduced by 67% and the wheel side output torque is reduced by 29%. The test bench has better controllability by using diagonal matrix decoupling control, and it can meet the demand of vehicle wheel-bridge dynamic simulation loading experiment. The results can provide a certain experimental basis for the design of this kind of wheel bridge test bench and the simulated loading experiment.
Key words: multiaxial vehicle; drive axle; test bench; decoupling control; simulated loading
���ŶԳ�����ȫ�ɿ��Ժ���������Ҫ��IJ�����ߣ������ؼ�������ģ����������о�Խ��Խ�ܵ�����[1�C2]�������İ�ȫ�ɿ��Ժ����������ںܴ�̶���ȡ���ڳ��������������ŵĹ������ԣ������������������Ǽȶ��İ���ѡ�Ͳ�Ʒ����ˣ�������Ƴ����ֱߺʹ����Ų����и��ָ��ӹ����µ�ģ���������������Ҫ[3]����Ϊһ������������ҵ�����ͳ������䴫���Ŷ�Ϊ�������������������Ϊ���ӣ���ˣ��Զ��ᳵ���������Լ��ֱߵ�ģ�����������Ϊ��Ҫ[4�C5]����ͳ���ż�������̨�������Լ��ĵ������飬�����ڹ��Ĵ�Ч�ʵ͵�ȱ��[6]��������Ը��ӵ��ۺ����飬�ɲ��õ��ռ�������̨��ʵ�֣�����������豸�Ӵ��ҵ�����ʽ���������մ��ڳ���͵���Ⱦ�����׳���Ԫ�����ٻ�������[7]�����ڶ��ε��ڵ�ģ���������̨[8�C9]��ģ�����ʵ�ʹ����ļ��ط�����нϸߵĿɿ��ԺͿɿ��ԣ��Ҽ۸���Ե����������ڶ�̬ģ����ط��棬��������̨������������[10]����������Ч������������ͨ��Һѹ����������ȣ��ɽ���30%����[11]�������ε��ڼ�������̨ģ��������ת�ٿ���ϵͳ��ģ����ص�ת�ؿ���ϵͳͨ����ѹ��Դ����ͻ�е������ϵ������һ��[12]��ʹ��ת�ٺ�ת�ؿ���ϵͳ�������ص���ϸ�������[13]���������̨��̬ģ������ȶ��Ժ�ȷ���½�[14�C15]������������Ի��ڶ��ε��ڵ�ģ���������̨���������ε������Ŵ��ݺ���ģ�ͼ�ʵ���ֳ��������ԽǾ������öԽǾ����ϵͳ���н�����ƣ����ͨ����ϸ���ʵ�鼰�������ʵ�飬�õ���ϸ��ŵĹ��ɣ�ȷ��������Ʒ�������Ч�ԣ��������̨�Ŀɿ��ԺͿɿ��ԡ�
1 ���ᳵ������ģ���������̨
��������ҵ��4�����Ϳ���Ϊԭ�ͣ��䴫����ϵ�������������ᡢ�ֱ�(����)�����Ͷ�������ᣬ���ģ���������̨�����ͼ1��ʾ����ͼ1�ɼ�������̨��Ҫ������ѹ��Դ��������Ԫ������������ֱ��ص�Ԫ�������źͼ��������ϵͳ�������ͼ��ظ���Ԫ�ĺ����Ƕ���Ԫ��(4��)����Һѹ��ͨ��Һ��ѹ����ϲ����ں�ѹ��Դ�ṩ�ĺ�ѹ�����ϣ���е��ͨ��ת��ת�ش��������������������ź��ֱߵȻ�е���������һ��[16�C17]������̨�Ĺ����Ƕ�����ת�ٺ����ת�ؽ��е��ڣ�ʵ�ֶԴ����ż��ֱߵ����������ת�ؽ���ģ�⡣1�Ŷ���Ԫ��ģ�������������ת�٣�2�Ŷ���Ԫ��ģ����Ŷ������ת�أ�3�ź�4�Ŷ���Ԫ���ֱ�ģ�������ֱ����ת�ء�ϵͳ����ʱ��1�Ŷ���Ԫ�������﹤���������Ժ�ѹ��Դ��Һѹ��ת���ɻ�е�ܣ���ͨ�������������2�š�3�ź�4�Ŷ���Ԫ�����ù�������ʵ�ֶԴ����ŵļ��ء����ͬʱ��2�š�3�ź�4�Ŷ���Ԫ���ֽ�����Ļ�е��ת��ΪҺѹ�ܣ����»�����1�Ŷ���Ԫ����������Ӷ��γ�1����ʽѭ���Ĺ�����[18]��ʵ���������ա�����ϵͳ��ͨ����е�����Һѹ���2��������ʽ��ɵģ���ˣ�������Ԫ��ѹ��������ͨ��Һѹ����Ӱ���ֱ������Ԫ�Ͷ��������Ԫ��ѹ����ͬʱ�������Ԫ��ѹ�������ֻ�Ӱ�쵽������Ԫ��ѹ�������������ʽΪҺѹ��ϣ�ģ��4����ϵ��Ԫ��ͨ�������������������������Ȼ���ֱ������ش��������ӣ����������е����ϵͳ��ÿ����Ԫ�ĸ�������ϵ�����ڲ��죬��ˣ����������Ԫ�������Ԫ���ڽ�ǿ����ϸ��ţ�ij����Ԫ���ֲ��������������Ԫ��ɲ�ͬ�̶ȵ�Ӱ�죬�Ӷ�Ӱ����������̨�ļ������ܣ����������ʽΪ��е��ϡ�
2 ���ε�������̨����ϵͳ��ģ
���ͼ1��ʾ��������̨�����ݶ���Ԫ�������ر���Һѹ��[19]�������ŵȵĽṹ����ԭ������������ϵͳ�����ڵ���ѧģ�����¡�
����Ԫ��ǰ�ü��������Ƶĵ�Һ�ŷ�����������Ϊ
 (1)
(1)
ʽ�У�Q(s)Ϊ�����������m3/s��V(s)Ϊ�������ѹ��V��KvΪ����������ϵ����m3/(s��V)����vΪ���Ĺ���Ƶ�ʣ�Hz����vΪ��������ȡ�
����Һѹ������ƽ�ⷽ��Ϊ
 (2)
(2)
ʽ�У�qviΪ����Һѹ��������m3/s��yiΪ����Һѹ����λ�ƣ�m��AgiΪ����Һѹ����Ч���������m2��CtiΪ����Һѹ��й©ϵ����m3/(s��Pa)��pLiΪ����Һѹ����ѹ����Pa��VtiΪ����Һѹ�����ݻ���m3����eΪҺѹ���������ģ����N/m2��iΪ����Һѹ�ױ�ţ�i=1��2��3��4��
����Һѹ����ƽ�ⷽ��Ϊ
 (3)
(3)
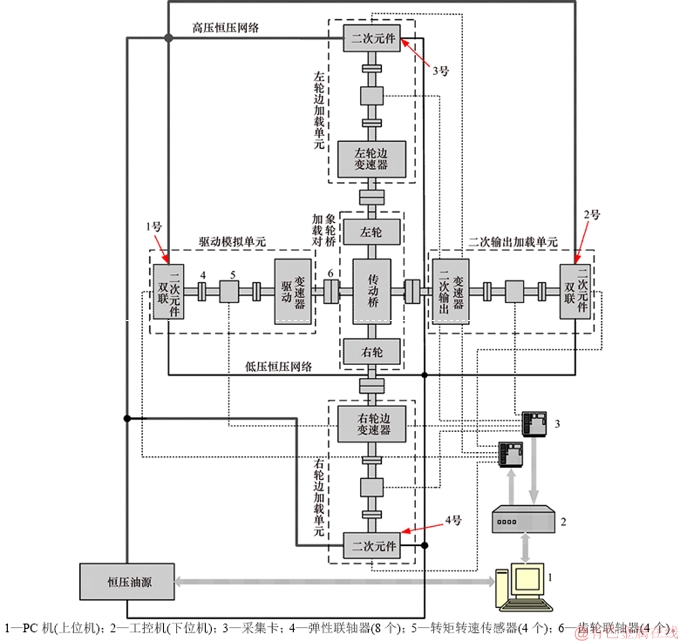
ͼ 1 ���ż�������̨���
Fig. 1 Composition of loading test bench for wheel-bridge
ʽ�У�miΪ����Һѹ��Ч������kg��BciΪ����Һѹ������ϵ����N��s/m��KiΪ���ص��ɸնȣ�N/m��FiΪ����Һѹ���⸺������N��
����Ԫ����������Ϊ
 (4)
(4)
ʽ�У�ViΪ����Ԫ��������m3/rad��VmΪ����Ԫ�����������m3/rad��XgmΪҺѹ��������г̣�m��XgiΪ��i��Һѹ�����г̣�m��
������Ԫ����Ԫ������ƽ�ⷽ��Ϊ
 (5)
(5)
ʽ�У�M1tΪ����Ԫ���������ת�أ�N��m��M1Ϊ����Ԫ��ʵ�����ת�أ�N��m����p1Ϊ����Ԫ���Ϳ�ѹ�MPa��V1Ϊ����Ԫ��������m3/rad��J1Ϊ����Ԫ������˼��������������Чת��������kg��m2��R1Ϊ����Ԫ����Ч����ϵ����N��m��s/rad����1Ϊ����Ԫ��ת�ǣ�rad��
���������ֱߺͶ��������Ϊ������ص�Ԫ���ṹ��ʽ��ģ����ȫ��ͬ���Զ���������ص�ԪΪ�����������ص�Ԫ����Ԫ��������ƽ�ⷽ�̣�
 (6)
(6)
ʽ�У���p2Ϊ����Ԫ���Ϳ�ѹ�MPa��V2Ϊ����Ԫ��������m3/rad��J2Ϊ����Ԫ������˼���������������Чת��������kg��m2��R2Ϊ����Ԫ������ϵ����N��m��s/rad����2Ϊ����Ԫ��ת�ǣ�rad��
�������ŵ�Ч����ģ����ͼ2��ʾ������ͼ2���������Ի��ڼ�����ʱ�IJ�������ɽ����������ŵ�Ч����ƽ�ⷽ�̣�
 (7)
(7)
ʽ�У�Mq1Ϊ����������ת�أ�N��m��Mq2Ϊ���Ŷ��������ת�أ�N��m��Mq3Ϊ���ֱ������ת�أ�N��m��Mq4Ϊ���ֱ������ת�أ�N��m��JqΪ�������ŵ�Чת��������kg��m2��RqΪ�������ŵ�Ч����ϵ����N��m��s/rad��iqΪ�������ٱȣ�ix3Ϊ���ֱ����������ȣ�ix4Ϊ���ֱ����������ȣ���q1Ϊ������ת�ǣ�rad��
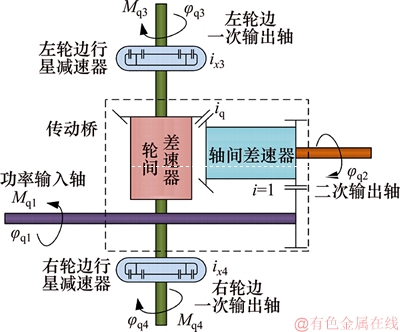
ͼ 2 ��������ģ��
Fig. 2 Physical model of wheel-bridge
��ʽ(1)~(7)�������ϱ任����������̨��е���IJ�������ϵͳ�������ں����ỷ�ڡ������ھ����ʾ���¡�
ת�١�ת��ϵͳ����Ԫ�����������ۺϴ��ݺ���Ϊ
 (8)
(8)
ʽ�У�n=1��2��3��4��pLΪ���縺��ѹ����KyΪλ�ƴ������任ϵ����
����ϵͳ��е���ۺϹ������ỷ�ڴ��ݺ���Ϊ
 (9)
(9)
����ϵͳ��е����˱������ڴ��ݺ���Ϊ
 (10)
(10)
ʽ�У�ib1Ϊ���������������ȣ�ib2Ϊ����������������ȣ�ib3��ib4�ֱ�Ϊ�����ֱ߱����������ȡ�
ת�ٴ������任ϵ����K11=0.019 2��ת�ش������任ϵ����K21=0.004 95��K31= K41=0.009 91��ϵͳ����˱������ڴ��ݺ�����K22= K32= K42=0.232��
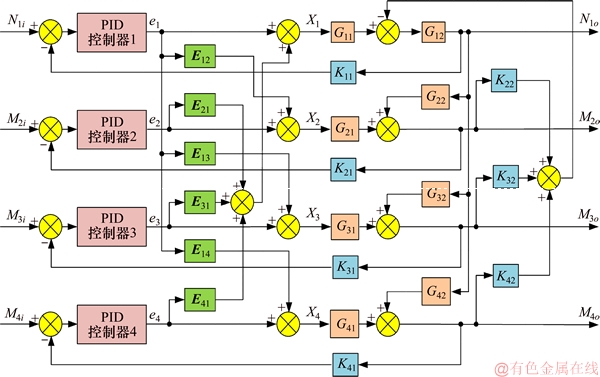
���������Ƶ�����ϵͳǰ�ü��������ظ�ģ���м������˲�PID������[20]���ɵ�����ϵͳ�Ĵ��ݺ�������ͼģ����ͼ3��ʾ��ͼ3�У�N1i~N1oΪ������Ԫת�ٿ���ϵͳ��M2i~M2oΪ�����Ŷ��������Ԫ��ת�ؿ���ϵͳ��M3i~M3o��M4i~M4o�ֱ�Ϊ�����ֱ������Ԫ��ת�ؿ���ϵͳ��������ϵͳ�У�ת��ϵͳ��ת��ϵͳ��ֱ�ӿ��ƣ�ת��ϵͳ��ͨ���������ỷ�ڿ���ת��ϵͳ����ˣ�ϵͳ����ת�������ת�ش���һ���̶ȵ���ϸ������⡣
3 �Խǽ�����ƾ�������
Ϊ�˽������̨����ϵͳת����ת�ؼ����ϸ������⣬������̨ȡ�öԽǾ������[21]���Ʒ�������������̨�����롢���ģ�Ϳ�֪��ʵ��ϵͳ������ʹϵͳ�Ĵ��ݺ���Ϊ�ԽǾ�����ʽ����ˣ�Ϊʵ�ִ��ݺ����Խǻ�����ģ�����ϵͳ����Ԫ֮�������ض��ķ�����������E12��E13��E14��E21��E31��E41����ͼ4��ʾ������ͼ4�������ģ�ͣ��м����X1��X2��X3��X4����Ʊ���e1��e2��e3��e4�Լ�ϵͳ�������N1o��M2o��M3o��M4o֮���ϵ�ɱ�ʾ���£�
 (11)
(11)
 (12)
(12)
��ʽ(11)��ʽ(12)�ã�



 (13)
(13)
������A�Խǻ������ݸ����ھ��������ý������Ϊ
 (14)
(14)

ͼ 3 PID���Ƶ�ģ�����ϵͳ����ͼ
Fig. 3 Block diagram of PID controlled analog loading system
ͼ 4 ������Ƶ�ģ�����ϵͳ����ͼ
Fig. 4 Block diagram of an analog loading system controlled by decoupling
����������빤�ػ������Ƴ��ɽ������ϵͳ��ͨ����λ����ɼ���ϵͳ�Ľ�����ơ�
4 ʵ���о�
Ϊ�о�����̨����ת�ٺ����ת�ؼ����ϸ������⣬��֤��������ֶε���Ч�ԣ�����ͼ1�ģ���������̨��ͼ5��ʾ��
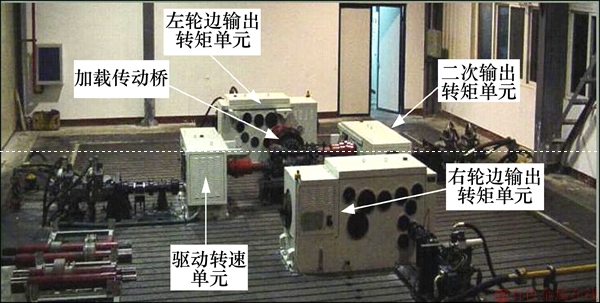
ͼ 5 ����̨ʵ���ʵ���ֳ�
Fig. 5 Physical and experimental site of test rig
�������ϵͳ����Ԫǰ�ü������������õ�Һ�ŷ����ͱ���Һѹ����Ҫ�������1��ʾ��
�������ϵͳ����Ԫ���ö���Ԫ��������ͬ���ͺ�Ϊ��ʿ��A4VSO250 DS�ͣ���Ҫ��������2��
����̨����ϵͳ����е��Ԫ�����������һ�£����ֲ������3��ʾ��
�� 1 ǰ�ü��������Ʋ���
Table 1 Pre-stage displacement control parameters
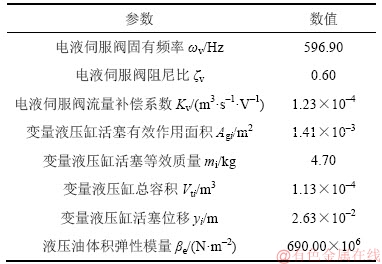
�� 2 ����Ԫ������
Table 2 Secondary element parameters
�� 3 ���ػ�еϵͳ����
Table 3 Loading mechanical system parameters

����2��3�и��������뵽��λ�������ڵĴ��ݺ����У�������������̨�������ʵ�顣
4.1 ��ϸ���ʵ��
4.1.1 ����ת�ٲ�������ʵ��
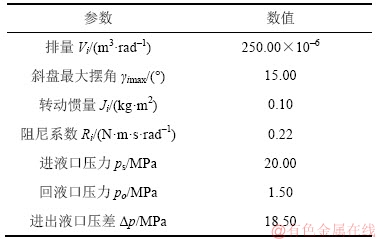
������̨���������ϵͳ�У�������������̨�����ز�������δ��������������£���������ת�����Ҳ�������ʵ�顣���У�����ת�����Ҳ���Ƶ����������Ϊ0.5��1.0��2.0 Hz��ת�ٷ�ֵ����Ϊ60 r/min��ʵ����������ͼ6��ʾ��ͼ6(a)��(b)��(c)��ʾ�ֱ�Ϊ3��Ƶ��������ת�ٲ����Զ������ת�ء��ֱߣ�������ͬ�����ת�صĸ���ʵ�����ߣ�ͼ6(d)��(e)��(f)��ʾ�ֱ�Ϊ3��Ƶ���¶������ת�ص�������ߣ�ͼ6(g)��(h)��(i)��ʾ�ֱ�Ϊ3��Ƶ�����ֱ����ת�ص�������ߡ�
��ͼ6��֪������ת�ٵIJ������¶������ת�غ��ֱ����ת�ز�ͬ�̶ȵIJ�����������ת�ٲ���Ƶ���������������ת�غ��ֱ����ת�صIJ���������ӣ�������ת�ٲ���Ƶ��Ϊ0.5 Hz ʱ���������ת�ص�������Ϊ15 N��m���ֱ����ת�ص�������Ϊ7 N��m��2.0 Hzʱ���������ת�ص�������Ϊ30 N��m���ֱ����ת�ص�������Ϊ13 N��m��
4.1.2 ���ת�ز�������ʵ��
�������ת�����ֱ����ת�ؾ�Ϊϵͳ����ˣ��Ҷ�ת�ٵĸ��������ͬ����ˣ��Զ������ת��Ϊ��������ת�ز������Ŷ�����ת��Ӱ�졣
ͼ 6 ����ת�ٲ�������ʵ������
Fig. 6 Experimental curves of driving speed fluctuation interference
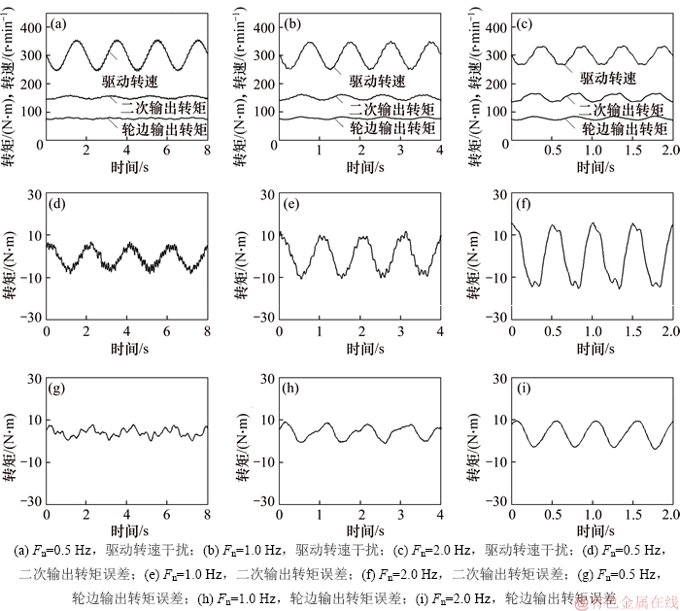
ʵ�����������ת�ٲ�������ʵ����ͬ���������ת�����Ҳ���Ƶ����������Ϊ0.5��1.0��2.0 Hz����ֵ����Ϊ80 N��m��ʵ����������ͼ7��ʾ��ͼ7(a)��(b)��(c)��ʾ�ֱ�Ϊ3��Ƶ���¶������ת�ز���������ת�ٵĸ���ʵ�����ߣ�ͼ7(d)��(e)��(f)��ʾ�ֱ�Ϊ3��Ƶ��������ת�ٵ�������ߡ�
��ͼ7��֪���������ת����һ����Ƶ�ʽ��в���ʱ������ת�ٽ������ϴ���������ת�ٲ������������֮ͬ�����ڣ��������ת�ز���ʱ������ת�ٵIJ�������沨��Ƶ�ʵ����Ӷ���С�����������ת�ز���Ƶ��Ϊ0.5 Hzʱ������ת�ٵ�������Ϊ18 r/min���������ת�ز���Ƶ��Ϊ2.0 Hzʱ����ת�ٵ�������Ϊ15 r/min��
4.2 �������ʵ��
Ϊ����ͬδ����ʱ�ĸ������������бȽϣ�����ʵ�����������������ϸ���ʵ�鱣��һ�£�ȡ��������Ϊ0.5Hz������������ۣ����������ƺ��ʵ������ͼ8��ʾ��ͼ8(a)��ʾΪ����ת�ٲ��������µĽ������ʵ�����ߣ�ͼ8(b)��(c)��ʾ�ֱ�Ϊ���������������ת�غ��ֱ���ת�ص�������ߣ�ͼ8(d)��ʾΪ�������ת�ز��������µĽ������ʵ�����ߣ�ͼ8(e)��ʾΪ���������ת�ٵ�������ߡ�
ͼ 7 �������ת�ز�������ʵ������
Fig. 7 Experimental curves of disturbance of secondary output torque ripple

ͼ 8 �������ʵ������
Fig. 8 Experimental curves of decoupling control
��ͼ8��֪�����������ƺ������ת�غ��ֱ����ת�ص��������������5 N��m������ת�������������4 r/min����δ���н�����Ƶ�ʵ�������жԱȿ�֪�������������ת���������С67%���ֱ���ת���������С29%������ת���������С78%��
5 ����
1) ͨ����ϸ���ʵ�飬����ģ���������̨����ת�ٺ����ת��֮�����һ���̶ȵ���ϸ��ţ�����Ҫ����Ϊ������ת�ٵIJ�������������ת�غ��ֱ����ת�ز�ͬ�̶ȵIJ�����������ת�ٵIJ���Ƶ������ʱ���������ת�غ��ֱ����ת�صIJ���������ӣ����ת�صIJ�����������ת�ٲ����ϴ�IJ����������ת�ز���Ƶ������ʱ������ת�ٵIJ�������С��
2) ͨ��������̨����ת�ٺ����ת�ؽ��н�����ƣ�����ת�������ת�ز��������������Ƚ���ǰ��С78%���������ת�غ��ֱ����ת��������ת�ٲ����������������Ƚ���ǰ��С��67%��29%�����öԽǾ��������̨���н�����ƣ�����ȼ�С����ϸ��ŵ�Ӱ�죬����Ч����Ч���Ӷ����������̨�Ŀ������ܺ��ȶ��ԡ�
�ο����ף�
[1] PENG Jiankun, HE Hongwei, FENG Nenglian. Simulation research on an electric vehicle chassis system based on a collaborative control system[J]. Energies, 2013, 6(1): 312�C328.
[2] HO T H, KYOUNG K A. Speed control of a hydraulic pressure coupling drive using an adaptive fuzzy sliding-mode control[J]. IEEE/ASME Transactions on Mechatronics, 2012, 17(5): 976�C986.
[3] HAN S B, CHANG Y H, CHUNG Y J, et al. Fuel economy comparison of conventional drive trains series and parallel hybrid electric step vans[J]. International Journal of Automotive Technology, 2009, 10(2): 235�C240.
[4] �µ�ƽ, Ī����, ��ľ��. ���������Ŵ���Ч������̨�����Ƽ�����[J]. �й���е����, 2014, 25(12): 1699�C1703.
ZHANG Deping, MO Yimin, ZHAO Muqing. Development and testing bench for transmission efficiency of automobile drive axle[J]. China Mechanical Engineering, 2014, 25(12): 1699�C1703.
[5] ռ��, �̻���, �,��. �������������Ŵ���Ч������̨�������о�[J]. ��е����, 2017, 41(3): 197�C202.
ZHAN Rui, CHENG Huaguo, LI Jun, et al. Research of the method and test bench of drive Axle transmission efficiency for heavy vehicle[J]. Journal of Mechanical Transmission, 2017, 41(3): 197�C202.
[6] ZHAO Zhiguo, LEI Dan, Chen Jiayi, et al. Optimal control of mode transition for four-wheel-drive hybrid electric vehicle with dry dual-clutch transmission[J]. Mechanical Systems and Signal Processing, 2018, 105: 68�C89.
[7] �. ����PLC�ĵ���ʽ����������ƣ����������̨�����Ӧ��[D]. ����: �����ѧ��е����ѧԺ, 2015: 12�C14.
ZHUO Ya. The design and application of electrically closed transmission fatigue life test platform based on PLC[D]. Chongqing: Chongqing University. College of Mechanical and Engineering, 2015: 12�C14.
[8] ZANG Faye, YONG Wang, YANG Renming. Robust control for a class of secondary regulation rotate speed systems via hamiltonian function method[J]. Journal of Intelligent & Fuzzy Systems, 2017, 32(1): 991�C997.
[9] SHEN Wei, JIANG Jihai. Analysis and development of the hydraulic secondary regulation system based on the CPR[C]// 2011 International Conference on Fluid Power and Mechatronics (FPM). Beijing, 2011: 117�C122.
[10] ������, Ҧ����, ������, ��. ���̻�е��������̬��������װ��[J]. �й���·ѧ��, 2014, 27(14): 1953�C1959.
WANG Haifei, YAO Shuxin, CAO Leilei, et al. Test device of construction machinery engines under dynamic loading[J]. China Journal of Highway and Transport, 2014, 27(14): 1953�C1959.
[11] HO T H, KYOUNG K A. Modeling and simulation of hydrostatic transmission system with energy regeneration using hydraulic accumulator[J]. Journal of mechanical science and technology, 2010, 24(5): 1163�C1175.
[12] ZANG Faye, YONG Wang. Fuzzy-neural network control on secondary hydraulic transmission system[C]// Advanced Materials Research. Qingdao, 2014: 1615�C1618.
[13] XUE Hua, CHEN Jingru, LUAN Menggui, et al. Coupling influence and decoupling control of the secondary regulation loading system for the drive axle of vehicle[C]// 2010 International Conference on Mechanic Automation and Control Engineering (MACE). Wuhan, 2010: 3246�C3249.
[14] COMELLAS M, PIJUAN J, POTAU X, et al. Efficiency sensitivity analysis of a hydrostatic transmission for an off-road multiple axle vehicle[J]. International Journal of Automotive Technology, 2013, 14(1): 151�C161.
[15] DO H T, PARK H G, AHN K K. Application of an adaptive fuzzy sliding mode controller in velocity control of a secondary controlled hydrostatic transmission system[J]. Mechatronics, 2014, 24(8): 1157�C1165.
[16] ����, ����. ���ڶ��ε��ڵij������ż���ϵͳ�Ľ�����Ʋ����о�[J]. ��е��ѧ�뼼��, 2014, 33(7): 1087�C1090.
WANG Hui, XU Zhuo. Research on the decouple control strategy based on secondary regulation for the vehicle��s wheels and transmission bridges[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(7): 1087�C1090.
[17] ����, �����. ���ͳ��������Ŷ��ε���ģ���������̨�����Ӱ�������[J]. ��е����ѧ��, 2004, 40(6): 19�C22.
WANG Hui, LI Hongren. Coupling influence and decoupling of the secondary regulation load simulation test equipment for the drive axle of heavy vehicle[J]. Chinese Journal of Mechanical Engineering, 2004, 40(6): 19�C22.
[18] ����, ���鶫, ������, ��. Һѹ�ͷ�����������ת�ٺ�ת�ؽ������[J]. �й���е����, 2016, 27(7): 951�C956.
ZHANG Yin, KONG Xiangdong, CHEN Lijuan, et al. Decoupling control of speed and torque of a hydraulic wind turbine[J]. China Mechanical Engineering, 2016, 27(7): 951�C956.
[19] Ҧ����, ����. ���ε��ھ�Һ����ϵͳ�ļ����о�[J]. ���崫�������, 2014(3): 31�C33.
YAO Shuxin, KONG Yan. Research on hydrostatic transmission technology in secondary regulation[J]. Fluid Power Transmission & Control, 2014(3): 31�C33.
[20] LI Mingxing, JIA Yinmin, DU Junping. LPV control with decoupling performance of 4WS vehicles under velocity-varying motion[J]. IEEE Transactions on Control Systems Technology, 2014, 22(5): 1708�C1724.
[21] LI Mingxing, JIA Yinmin. Decoupling and robust control of velocity-varying four-wheel steering vehicles with uncertainties via solving attenuating diagonal decoupling problem[J]. Journal of the Franklin Institute, 2017, 354(1): 105�C122.
(�༭ ����ƽ)
�ո����ڣ�2018-06-19�������ڣ�2018-08-01
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51405213) (Project(51405213) supported by the National Natural Science Foundation of China)
ͨ�����ߣ����ۣ���ʿ�����ڣ����¶��ε��ڼ����о���E-mail��wanghui9955@126.com

