欠驱动垂直起降UAV的全局K指数轨迹跟踪
贾鹤鸣1,王璐2
(1. 东北林业大学 机电工程学院,黑龙江 哈尔滨,150001;
2. 上海交通大学 电子信息与电气工程学院,上海,200240)
摘要:针对欠驱动六自由度垂直起降无人驾驶飞行器的轨迹跟踪控制问题,设计使跟踪误差全局K指数收敛的控制器。建立基于修正的罗德里格参数的系统非线性误差模型,基于分级控制的思想,使用反步法分别设计使飞行器位置和姿态子系统指数稳定的控制器;考虑到该系统稳定性分析的复杂性,通过刚体旋转的罗德里格斯定理建立子系统间耦合项与修正的罗德里格参数间的内在联系,并最终得到闭环误差系统的全局K指数稳定的结论。仿真分析表明:本文提出的控制方法能够有效实现飞行器对于复杂轨迹的快速和精确跟踪。
关键词:欠驱动垂直起降无人驾驶飞行器;轨迹跟踪控制;分级控制;全局K指数稳定;罗德里格斯定理
中图分类号:TP24 文献标志码:A 文章编号:1672-7207(2013)08-3231-09
Global K-exponential trajectory tracking of underactuated VTOL UAV
JIA Heming1, WANG Lu2
(1. College of Mechanical and Electrical Engineering, Northeast Forestry University, Harbin 150040, China;
2. Electronic Information and Electric Engineering School, Shanghai Jiao Tong University, Shanghai 200240, China)
Abstract: In order to solve the trajectory tracking control problem of the six degrees of freedom vertical take-off and landing unmanned aerial vehicles, a controller which is capable of stabilizing the trajectory tracking error K-exponentially was designed. Firstly, a nonlinear error model was established based on the modified rodrigues parameters. Considering the thought of hierarchical control, the position and attitude controller for the translational and orientation dynamics were designed based on the backstepping approach, respectively. Due to the complexity stability analysis of this system, the Rodrigues theory was applied to analyze the internal contact between the coupled term and the modified rodrigues parameters, and hence the global K-exponential stability of the closed-loop system was proved. Simulation results show that the proposed control scheme enables the aircraft to track a complex trajectory fastly and accurately.
Key words: underactuated vertical take-off and landing unmanned aerial vehicles; trajectory tracking control; hierarchical control; global K-exponential stability; Rodrigues theory
近年来,无人驾驶飞行器(UAV)的研究与应用受到广泛关注。垂直起降UAV(VTOL UAV)由于能够欠驱动垂直起降和悬停而被广泛应用于无人侦察、交通管理,森林防火、城市巡逻等领域。并且,由于能够作为低成本的机器人学研究平台,这类系统逐渐受到研究者的重视[1]。对于VTOL UAV而言,设计高效控制策略是该领域的重要研究方向。文献[1-4]针对1类三自由度VTOL UAV控制问题进行研究。虽然三自由度VTOL UAV的模型简单,控制器设计和稳定性分析难度较低,但其实际应用远不如六自由度VTOL UAV广泛,因此,对于六自由度VTOL UAV的研究更具实际意义。由于六自由度VTOL UAV具有级联、非完整、强耦合等特性,其控制器设计和稳定性分析具有较大难度。目前,六自由度VTOL UAV的姿态控制算法已获得广泛研究和应用[5-9],然而,考虑到六自由度VTOL UAV的强耦合特性,此类系统的控制律设计过程复杂且全局稳定性难以证明,因此,其位置或轨迹跟踪控制器设计比单纯的姿态控制更具挑战性。Guilherme等[10]以四旋翼VTOL UAV为背景,利用模型预测控制方法设计位置子系统控制器,并通过位置控制器的计算,得到飞行器的期望姿态,从而利用H∞控制方法设计姿态子系统控制器。Bertrand等[11]对VTOL UAV的位置和姿态动力学模型进行分解,并利用分级控制的思路,分别设计子系统的状态反馈控制器,进而利用扰动理论对系统进行稳定性分析。Roberts等[12]研究VTOL UAV的自适应轨迹跟踪控制方法;首先,设计能够使系统位置模型实现轨迹跟踪的有界线加速度;进而,由线加速度经计算得到飞行器的期望姿态;最后,通过1个姿态跟踪控制器实现飞行器的轨迹跟踪控制。国内对于此类问题的研究较少,樊鹏辉等[13]针对一类飞行模态可变的旋翼飞行器进行研究,并分别设计基于反步法的航迹和姿态控制器,但并没有考虑系统的全局稳定性分析问题。由此可知,对于六自由度VTOL UAV的复杂非线性受控模型,一般的分析方法是使用分级控制的思路,将VTOL UAV系统分解为位置和姿态动力学系统,从而独立地设计使2个子系统分别稳定的控制律。然而,已有的大部分方法中,系统的稳定性仅是基于子系统分析的,由于飞行器子系统间耦合关系过于复杂,对于系统全局稳定性分析的方法较少。基于以上分析,本文作者主要研究六自由度VTOL UAV的轨迹跟踪控制问题,并对于系统的稳定性分析问题进行深入研究。首先,针对轨迹跟踪控制问题,以修正的罗德里格参数(MRPs)作为系统姿态表示参数,建立VTOL UAV轨迹跟踪误差模型;进而利用刚体旋转的罗德里格斯定理建立子系统间耦合项与姿态描述参数间的内在联系;最后,利用分级控制方法,将飞行器系统模型分解为位置和姿态系统分别设计控制器;并根据耦合项性质,得到系统跟踪误差的全局K指数稳定结论。
1 系统原理及问题描述
1.1 系统模型
考虑六自由度欠驱动VTOL UAV的传统数学模型表示方法。选取北、东、天坐标系作为地球坐标系,得到系统数学模型为:
 (1)
(1)
其中: 分别为地球坐标系下载体的位置和速度,
分别为地球坐标系下载体的位置和速度, 为载体坐标系下的角速度;
为载体坐标系下的角速度; 为系统的姿态矩阵;
为系统的姿态矩阵; 为姿态矩阵的第三列,
为姿态矩阵的第三列, 为
为 轴的单位向量;m和
轴的单位向量;m和 分别为系统的质量和转动惯量矩阵,系统的转动惯量矩阵J为正定对角阵,且x轴和y轴对应的转动惯量相等。g为重力加速度;控制量T和
分别为系统的质量和转动惯量矩阵,系统的转动惯量矩阵J为正定对角阵,且x轴和y轴对应的转动惯量相等。g为重力加速度;控制量T和 分别为作用在载体上的升力和力矩;
分别为作用在载体上的升力和力矩; 分别为横滚、俯仰和航向3个角运动方向上的控制力矩。式(1)中,姿态矩阵R是一种含有6个冗余的9参数姿态表示法。
分别为横滚、俯仰和航向3个角运动方向上的控制力矩。式(1)中,姿态矩阵R是一种含有6个冗余的9参数姿态表示法。
1.2 基于MRPs的轨迹跟踪误差模型
由1.1节的分析可知,根据式(1)直接进行控制器设计存在一定的难度。下面,针对六自由度VTOL UAV的轨迹跟踪控制问题,以MRPs对载体姿态进行描述,建立系统的轨迹跟踪误差模型。假设飞行器期望轨迹为 ,其中,
,其中, ,
, 和
和 分别为期望轨迹矢量的位置、速度、加速度信息且期望加速度满足假设条件1。
分别为期望轨迹矢量的位置、速度、加速度信息且期望加速度满足假设条件1。
假设1:期望加速度是有界的,即 其中,γ为正常数。
其中,γ为正常数。
令 为位置误差,
为位置误差, 为速度误差,
为速度误差, 为姿态误差矩阵,根据姿态矩阵的定义知,当且仅当
为姿态误差矩阵,根据姿态矩阵的定义知,当且仅当 时,
时, 为三阶单位矩阵。定义载体的MRPs为:
为三阶单位矩阵。定义载体的MRPs为:
 (2)
(2)
其中:r为单位向量;α为旋转角。
假设根据计算得到的VTOL UAV期望MRPs、期望角速度和期望角加速度分别为 ,
, 和
和 。令MRPs误差为
。令MRPs误差为 ,可由计算得到,且根据MRPs的定义知,当且仅当
,可由计算得到,且根据MRPs的定义知,当且仅当 时
时 成立。由于MRPs是一种三参数姿态表示法,因此这是一种无冗余的姿态表达形式。
成立。由于MRPs是一种三参数姿态表示法,因此这是一种无冗余的姿态表达形式。
定义角速度误差为 ,将角速度误差对时间求导,得到:
,将角速度误差对时间求导,得到:

 (3)
(3)
其中: 为向量
为向量 对应的反对称矩阵。
对应的反对称矩阵。
从而得到如下的系统误差模型:
 (4)
(4)
其中:为 对时间的导数;
对时间的导数; 。
。
注1:关于MRPs的相关性质请参见文献[14]。
使用分级控制时,首先将误差模型分解为位置误差系统 和姿态误差系统
和姿态误差系统 :
:
 (5)
(5)
 (6)
(6)
当 时,位置误差系统和姿态误差系统间的耦合项
时,位置误差系统和姿态误差系统间的耦合项 。因此,可以认为该位置误差系统是由标称系统
。因此,可以认为该位置误差系统是由标称系统 和扰动项组成,标称系统和扰动项分别为:
和扰动项组成,标称系统和扰动项分别为:
 (7)
(7)
 (8)
(8)
2 VTOL UAV的轨迹跟踪控制器设计
前面已经将VTOL UAV非线性系统误差模型分解为位置误差子系统和姿态误差子系统,本节进行系统的控制器设计。
图1所示为轨迹跟踪控制系统框图,其中,ψd=0为载体的期望航向角信息。位置控制器根据期望轨迹和系统真实轨迹,得到期望升力和姿态控制量,进而通过姿态控制器,实现飞行器对于期望姿态的跟踪,从而实现对于飞行器的控制。
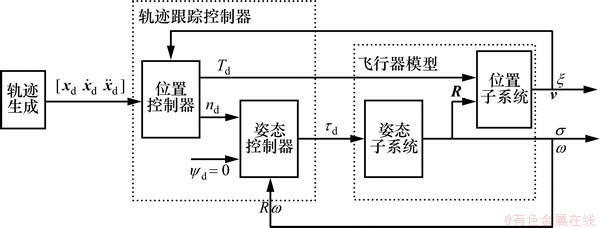
图1 非线性轨迹跟踪控制系统框图
Fig. 1 Nonlinear trajectory tracking control system diagram
系统的控制目标为:基于反步法设计控制器,使得基于MRPs的VTOL UAV非线性误差模型式(4)中的跟踪误差K指数稳定,进而实现VTOL UAV对于三维期望轨迹的快速、精确跟踪。下面给出控制器设计的具体步骤。
步骤1:位置系统控制器设计。
利用反步法设计使位置误差标称系统指数稳定的控制律。
首先,定义系统状态与虚拟反馈间的误差:
 (9)
(9)
其中: 为待定的虚拟控制量,根据虚拟反馈的定义知
为待定的虚拟控制量,根据虚拟反馈的定义知 。
。
在利用反步法设计控制器过程中,每一步都需要构造1个Lyapunov函数,使每一状态分量都具有渐近特性。取:
 (10)
(10)
由于nd是姿态矩阵的最后一列,根据姿态矩阵的性质有||nd||=1,即nd是1个单位向量,因此,得到期望升力Td和虚拟控制量nd为:
 (11)
(11)
其中:k1和k2为正常数。
由于nd含有1个约束方程||nd||=1,因此,nd并没有包含所有的期望姿态信息。令飞行过程中飞行器航向保持为0°,即可得到期望MRPs信息。
步骤2:姿态系统控制器设计。
利用反步法设计使姿态误差系统指数稳定的控制律。
首先,定义系统状态与虚拟反馈间的误差为:
 (12)
(12)
其中: 为待定的虚拟控制量。
为待定的虚拟控制量。
得到控制量 为
为

 (13)
(13)
其中:k3和k4为正常数。
控制律式(13)中,和无法直接测量, 的计算十分复杂,会引起计算膨胀等问题,因此,采用微分估计器获得、和的信息。1个n阶微分器的表达式如下[15]:
的计算十分复杂,会引起计算膨胀等问题,因此,采用微分估计器获得、和的信息。1个n阶微分器的表达式如下[15]:
 (14)
(14)
其中:f(t)为输入信号;yj为输入信号对时间的j次导数的估计值;λj,j=0,1,…,n为微分器参数。
3 稳定性分析
定理1:考虑六自由度VTOL UAV的位置误差标称系统,在控制律式(11)的作用下,该闭环误差系统的位置、速度误差是指数稳定的。
证明 根据式(9)的定义知, 和
和 为系统误差
为系统误差 和
和 的微分同胚,正定和等价于镇定和。定义位置系统的广义误差向量为
的微分同胚,正定和等价于镇定和。定义位置系统的广义误差向量为 。
。
定义Lyapunov函数:
 (15)
(15)
根据广义误差向量z1的定义知:
 (16)
(16)
其中: ,
, ,则对于位置误差标称子系统,该Lyapunov函数对时间的导数为
,则对于位置误差标称子系统,该Lyapunov函数对时间的导数为

 (17)
(17)
将控制律式(11)代入式(17),得到:
 (18)
(18)
其中: 。则位置误差标称系统的广义误差向量是指数稳定的,此时,该闭环误差系统的位置、速度误差是指数稳定的。
。则位置误差标称系统的广义误差向量是指数稳定的,此时,该闭环误差系统的位置、速度误差是指数稳定的。
定理2:考虑六自由度VTOL UAV的姿态误差系统,在控制律式(13)的作用下,该闭环误差系统的MRPs、角速度误差是指数稳定的。
证明:根据式(12)的定义知, 和
和 为系统误差和的微分同胚,正定和等价于正定和。姿态误差系统的广义误差向量为
为系统误差和的微分同胚,正定和等价于正定和。姿态误差系统的广义误差向量为 。
。
定义Lyapunov函数:
 (19)
(19)
根据广义误差向量z2的定义知:
 (20)
(20)
其中: ,
, ,
, 算子表示矩阵的行列式,则该Lyapunov函数对时间的导数为:
算子表示矩阵的行列式,则该Lyapunov函数对时间的导数为:

 (21)
(21)
将控制律式(13)代入式(21),得到:
 (22)
(22)
其中: ,则姿态误差子系统的广义误差向量是指数稳定的,此时,该闭环误差系统的MRPs误差、角速度误差是指数稳定的。
,则姿态误差子系统的广义误差向量是指数稳定的,此时,该闭环误差系统的MRPs误差、角速度误差是指数稳定的。
定理3:考虑六自由度VTOL UAV误差系统(4),在控制律(式(11)和(13))的作用下,飞行器飞行轨迹对期望轨迹的跟踪误差是全局K指数稳定的。
证明:对于位置子系统,Lyapunov函数V1对时间的导数为:
 (23)
(23)
由于定理1已证明位置误差标称子系统的指数稳定性,为证明飞行器系统的跟踪误差的全局稳定性,首先,分析扰动部分的性质。
由 ,则扰动部分的Euclidean范数为:
,则扰动部分的Euclidean范数为:

 (24)
(24)
假设是沿固定轴r旋转α角度得到的,r为单位向量,则根据刚体旋转的Rodrigues定理得:
 (25)
(25)
进而得到:
 (26)
(26)
由于 是1个二次型且
是1个二次型且 ,则有:
,则有:
 (27)
(27)
其中: 的特征多项式为
的特征多项式为 ,则该实对称阵的特征值为
,则该实对称阵的特征值为 ,故有:
,故有:
 (28)
(28)
根据Td的表达式知:
 (29)
(29)
其中: 。则:
。则:

 (30)
(30)
由Euclidean范数定义知 。故
。故 ,则得到如下结论:
,则得到如下结论:
 (31)
(31)
根据MRPs的定义知:
 (32)
(32)
则有:

 (33)
(33)
其中: ,
, 。
。
则有:
 (34)
(34)
由定理2知z2(t)是指数稳定的,对式(34)进行积分并假设初始t0时刻系统广义误差的初值分别为z1(t0)和z2(t0),得到:

 (35)
(35)
故Lyapunov函数 有上界,且满足:
有上界,且满足:

 (36)
(36)
则由V1的定义知,对于任意t≥t0,z1(t)是全局一致有界的:
 (37)
(37)
其中: 为系统的广义误差向量。
为系统的广义误差向量。
此时,对于位置子系统,Lyapunov函数V1对时间的导数为:


 (38)
(38)
其中: 。
。
定义1个新的Lyapunov函数 ,该Lyapunov函数对时间的导数:
,该Lyapunov函数对时间的导数:
 (39)
(39)
取 ,则:
,则:

 (40)
(40)
其中: 。
。
则有:
 (41)
(41)
其中: 。
。
因此,飞行器飞行轨迹对于期望轨迹的跟踪误差是全局K指数稳定的。
4 仿真分析
假设系统质量和转动惯量分别选取为:m=0.6 kg,Jx=Jy=0.2 kg/m2,Jz=0.04 kg/m2,在MATLAB/ SIMULINK中,检验本文提出方法对于VTOL UAV的轨迹跟踪控制效果,仿真步长取0.02 s。根据多次仿真实验对比,控制参数选取为:
 (13)
(13)
设计2组仿真实验来检验飞行器对于期望轨迹的跟踪效果。
情况1:假设期望轨迹为1条螺旋曲线,初始位置误差为 (m),初始MRPs误差为
(m),初始MRPs误差为 。图2所示为VTOL UAV对于螺旋上升曲线的跟踪控制效果,图3和图4所示分别为轨迹跟踪效果在x-o-y和x-o-z平面上的投影。图5~8所示分别为VTOL UAV的位置、速度、MRPs和角速度的误差曲线。
。图2所示为VTOL UAV对于螺旋上升曲线的跟踪控制效果,图3和图4所示分别为轨迹跟踪效果在x-o-y和x-o-z平面上的投影。图5~8所示分别为VTOL UAV的位置、速度、MRPs和角速度的误差曲线。
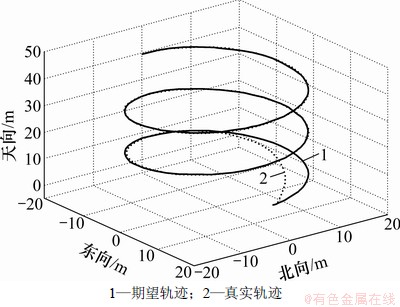
图2 VTOL UAV的轨迹跟踪控制效果(情况1)
Fig. 2 Trajectory tracking control effect of VTOL UAV (Case 1)
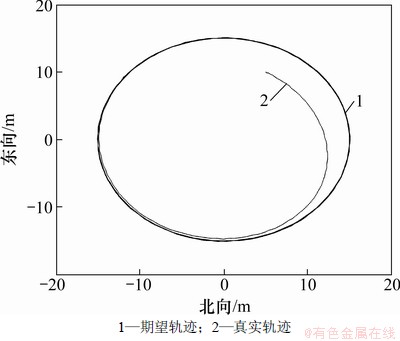
图3 轨迹跟踪控制效果在x-o-y平面的投影
Fig. 3 Projection in x-o-y flat of trajectory tracking control effect
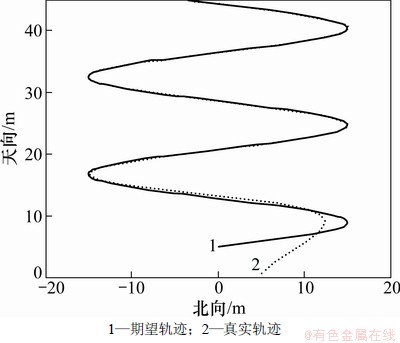
图4 轨迹跟踪控制效果在x-o-z平面的投影
Fig. 4 Projection in x-o-z flat of trajectory tracking control effect
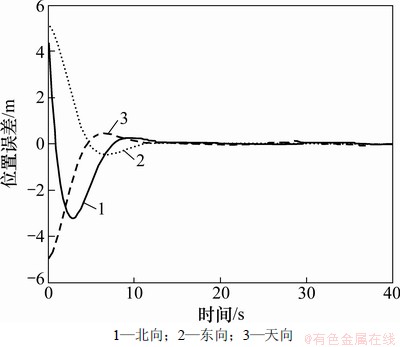
图5 位置误差曲线(情况1)
Fig. 5 Position error curve (Case 1)
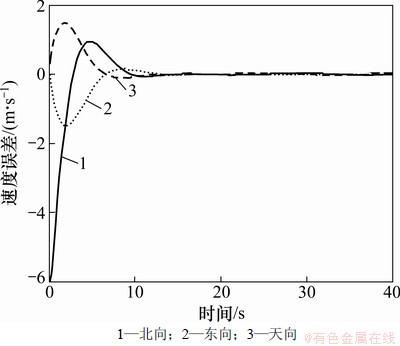
图6 速度误差曲线(情况1)
Fig. 6 Velocity error curve (Case 1)
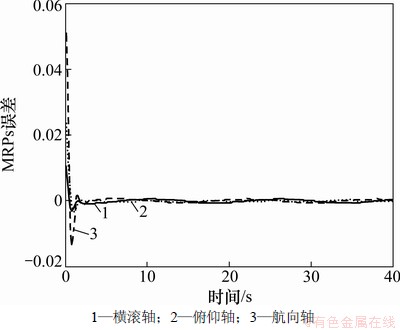
图7 MRPs误差曲线(情况1)
Fig. 7 MRPs error curve (Case 1)
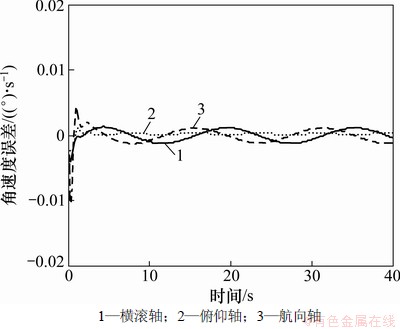
图8 角速度误差曲线(情况1)
Fig. 8 Angular velocity error curve (Case 1)
由图2~4可见:本文提出的控制算法能够有效实现飞行器对于螺旋上升曲线的跟踪,具有较强的实时性和控制精度。图5~8表明:在控制器的作用下,飞行器位置子系统状态能够较好地实现对于期望轨迹的跟踪,然而,由于期望轨迹变化较快,导致经位置子系统控制器计算得到的期望MRPs和期望角速度变化过快,此时,MRPs和角速度误差无法被完全消除,但对于姿态子系统而言,较小的误差并不会对位置子系统的收敛特性产生影响。
情况2:假设期望轨迹为1条包含匀加速、匀速、正余弦等运动分量的复杂轨迹,初始位置误差为 (m),初始MRPs误差为。图9所示为VTOL UAV对于该轨迹的跟踪控制效果,图10~13所示分别为VTOL UAV的位置、速度、MRPs和角速度误差曲线。
(m),初始MRPs误差为。图9所示为VTOL UAV对于该轨迹的跟踪控制效果,图10~13所示分别为VTOL UAV的位置、速度、MRPs和角速度误差曲线。
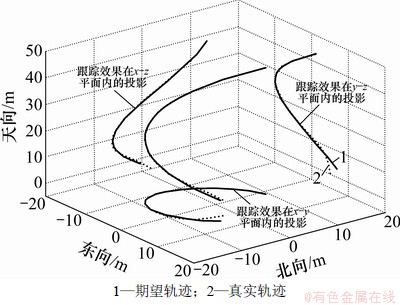
图9 VTOLUAV的轨迹跟踪控制效果(情况2)
Fig. 9 Trajectory tracking control effect of VTOL UAV (Case 2)
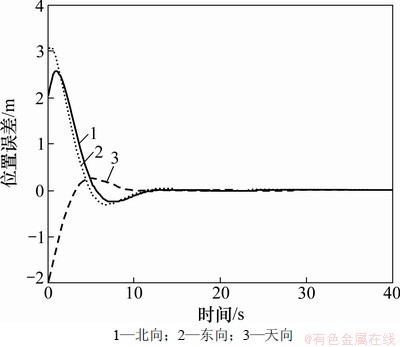
图10 位置误差曲线(情况2)
Fig. 10 Position error curve (Case 2)
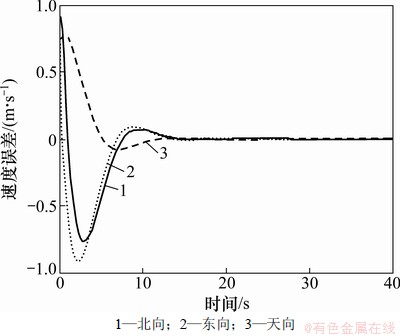
图11 速度误差曲线(情况2)
Fig. 11 Velocity error curve (Case 2)
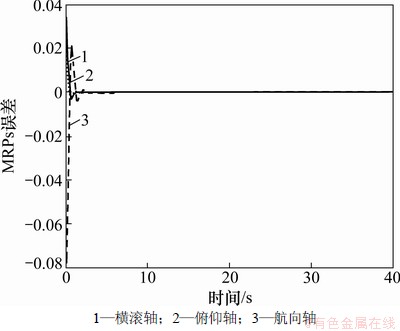
图12 MRPs误差曲线(情况2)
Fig. 12 MRPs error curve (Case 2)
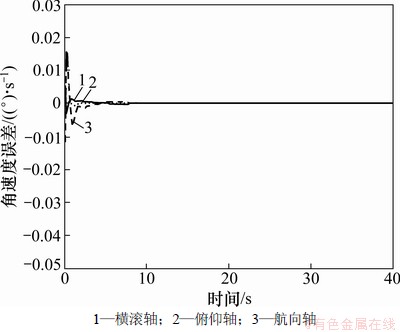
图13 角速度误差曲线(情况2)
Fig. 13 Angular velocity error curve (Case 2)
图9中曲线分别表示VTOL UAV对于期望轨迹的跟踪效果和轨迹跟踪曲线在3个平面上的投影,由图9可见:本文提出的控制方法能够有效解决VTOL UAV对于复杂轨迹的跟踪控制,且系统的初始误差能够在较短时间内收敛。图10~13所示分别为VTOL UAV的位置、速度、MRPs和角速度误差的收敛过程。可见:姿态子系统控制器能够使飞行器跟踪位置子系统计算得到的期望MRPs,且位置子系统控制器能够使位置子系统实现对于期望轨迹的跟踪。通过比较图13可知:姿态子系统跟踪误差能够在4 s内收敛,而位置子系统跟踪误差的收敛时间则为13 s,与位置子系统误差收敛速度相比,姿态子系统误差的收敛速度较快,这是由于在级联系统中,位置子系统状态直接受到姿态子系统影响,当姿态子系统状态快速收敛后,位置子系统状态才能够收敛。
以上仿真分析表明:基于MRPs非线性误差模型设计的控制器有效解决VTOL UAV的轨迹跟踪控制问题,且具有较强的实时性和较好的控制效果,对于系统的初始跟踪误差,控制器能够使其迅速收敛,并且具有较高的控制精度。
5 结论
(1) 针对六自由度VTOL UAV轨迹跟踪控制问题,以MRPs对系统姿态进行描述,建立系统的非线性轨迹跟踪误差模型,设计使位置和姿态误差系统指数稳定的控制器,并根据刚体旋转的Rodrigues定理对子系统耦合部分性质进行了分析,从而证明闭环误差系统的全局K指数稳定性。
(2) 提出的控制方法能够有效实现VTOL UAV对于复杂轨迹的跟踪控制,具有较高的控制精度,且当存在初始误差情况下,系统跟踪误差能够迅速收敛。
参考文献:
[1] 刘盛平, 陆震, 吴立成. 垂直起降飞机的全局轨迹跟踪控制[J]. 控制与决策, 2007, 22(8): 899-902.
LIU Shengping, LU Zhen, WU Licheng. Global trajectory tracking control of VTOL aircraft[J]. Control and Decision, 2007, 22(8): 899-902.
[2] 李茂青. 基于受控拉格朗日函数的垂直起降飞机控制器设计[J]. 控制理论与应用, 2010, 27(6): 688-694.
LI Maoqing. Control design for planar vertical takeoff-and-landing aircraft based on controlled Lagrangians[J]. Control Theory & Applications, 2010, 27(6): 688-694.
[3] ZOU Qingze, Devasia S. Precision preview-based stable-inversion for nonlinear nonminimum-phase systems: The VTOL example[J]. Automatica, 2007, 43(1): 117-127.
[4] Olfati-Saber R. Global configuration stabilization for the VTOL aircraft with strong input coupling[J]. IEEE Transactions on Automatic Control, 2002, 47(11): 1949-1952.
[5] Tayebi A. Unit quaternion-based output feedback for the attitude tracking problem[J]. IEEE Transactions on Automatic Control, 2008, 53(6): 1516-1520.
[6] ZOU Anmin, Kumar K D, HOU Zengguang. Quaternion-based adaptive output feedback attitude control of spacecraft using chebyshev neural networks[J]. IEEE Transactions on Neural Networks, 2010, 21(9): 1457-1471.
[7] ZOU Anmin, Krishna D K. Adaptive fuzzy fault-tolerant attitude control of spacecraft[J]. Control Engineering Practice, 2011, 19(1): 10-21.
[8] Kristiansen R, Nicklasson P J, Gravdahl J T. Satellite attitude control by quaternion-based backstepping[J]. IEEE Transactions on Control Systems Technology, 2009, 17(1): 227-232.
[9] XU Shunan, Gianmarco R, GAO Yongsheng, et al. Quaternion-based finite time control for spacecraft attitude tracking[J]. Acta Astronautica, 2011, 69(1/2): 48-58.
[10] Guilherme V R, Manuel G O, Francisco R R. An integral predictive/nonlinear H∞ control structure for a quad-rotor helicopter[J]. Automatica, 2010, 46(1): 29-39.
[11] Bertrand S, Guenard N, Hamel T, et al. A hierarchical controller for miniature VTOL UAVs: Design and stability analysis using singular perturbation theory[J]. Control Engineering Practice, 2011, 19(10): 1099-1108.
[12] Roberts A, Tayebi A. Adaptive position tracking of VTOL UAVs[J]. IEEE Transactions on Robotics, 2011, 27(1): 129-142.
[13] 樊鹏辉, 王新华, 蔡开元. 可垂直起降、高速前飞的飞行器设计与控制[J]. 控制理论与应用, 2010, 27(9): 1171-1177.
FAN Penghui, WANG Xinhua, CAI Kaiyuan. Design and control of aircraft of vertical take-off-and-landing and high-speed forward flight[J]. Control Theory & Applications. 2010, 27(9): 1171-1177.
[14] Tsiotras P. Further passivity results for the attitude control problem[J]. IEEE Transactions on Automatic Control, 1998, 43(11): 1597-1600.
[15] Cannas B, Cincotti S, Usai E. A chaotic modulation scheme based on algebraic observability and sliding mode differentiators[J]. Chaos, Solitons and Fractals, 2005, 26(2): 363-377.
(编辑 邓履翔)
收稿日期:2012-09-14;修回日期:2012-12-06
基金项目:教育部新世纪优秀人才支持计划项目(NCET-10-0279);国家自然科学基金资助项目(30972424)
通信作者:王璐(1987-),男,河南洛阳人,博士研究生,从事非线性系统控制研究;电话:15216657307,E-mail:wanglu1987xy@sjtu.edu.cn

