һ�ֻ�������Ӧ���롪������Ի���
��ˢֱ�����������ʶ����
�ҹ���, ��ΰ��
(�������̴�ѧ �������Ӽ����о���, ���� �人, 430033)
ժҪ: �Ի������뻻���������ˢֱ�����, �ڸ����䵥���Чģ�͵Ļ�����, ���û�������Ӧ���롪������Ի�(AIOL) ����, �������������ˢֱ������IJ�����ʶ����Ƶĵ���������, �������������ϵͳ�Ե������������Ӧ����; ����, �Ա�ʶ����������Ӧ�ĸĽ��� �о��ͷ�������������: AIOL������Ҫ���״̬������, �ο�ģ����Ҳ����������״̬��, �������Ӧ�ɵĵ����ϼ�, ����ʹ������ʶ����������һ������ڵõ����, ���ʺϵ�������п���; ����AIOL�����ĸĽ�������ʶ�㷨�����˴���ʶ�����仯������ϡ� ������ĸ���Ӱ��, �ܹ�ȷ�� �ȶ��ع��Ƶ������, ��ϵͳ����Ӧ���ܽϺ�, ���ڹ���ʵ�֡�
�ؼ���: ������ˢֱ�����; ����Ӧ���롪������Ի�; ������ʶ
��ͼ�����:TM33 ���ױ�ʶ��:A ���±��: 1672-7207(2005)06-1069-05
A parameter identification method of brushless DC motor
based on adaptive input-output linearization
JIE Gui-sheng, MA Wei-ming
(Institute of Power and Electronics Technology, Naval University of Engineering, Wuhan 430033, China)
Abstract: Equivalent single phase model of brushless DC motor (BLDCM) is deduced assuming it can commutate ideally. In order to improve the adaptive capability of the driving control system when the motor parameters vary, the current controller which is suitable for the control and parameter identification of BLDCM is designed based on adaptive input-output linearization method. The parameter identification method was improved. The research and simulation results show that the adaptive rule can be deduced easily with the AIOL method because it doesn��t require the state quantities�� discoupling and the estimated state quantities needn��t be included in the reference model ; at the same time, the method can make the parameter estimation and motor control solved in the same frame, so it is more suitable for the motor operation control. The improved parameter identification algorithm based on adaptive input-output linearization can estimate the motor parameters exactly and stably with good system response as it eliminates the parameters�� negative influences of mutually counteracting.
Key words: brushless DC motor; adaptive input-output linearization; parameter identification
������ˢֱ�����(BLDCM)�Ⱦ��н�������ṹ�� ���пɿ��� ά�����������, �ּ���ֱ��������Ƽ��ŵ�, ���Ҿ��б����Ҳ�����ͬ����������ת��/������, ����õ��Ϲ㷺��Ӧ��[1, 2]�� Ȼ��, BLDCM�����й�����������������ᷢ���仯(�ر������Ŵ����͵�о��Ͷ���С), ʹ�õ���������Ҳ����Ӧ�仯�� ���ڿ���ϵͳ, ȷ�еĵ�������������жϵ��������״̬, ������һЩ���ӿ��Ʒ���ʱ(�绻��ת����������), ��Ҫ֪��ȷ�еĵ������[4, 5]; ����, ��ʹ����PID����, ����������ҲҪ����ϵͳģ�ͺͲ������к���ѡ��͵���, �ʵ�������ı�ʶ������Ӧ�����Եú���Ҫ�� �Դ�, �ܶ��о�������ģ�Ͳο�����Ӧ(MRAS)������ �������Ծ���ʽ(LMI)��H2/H������³�����Ʒ����� �˹�������(ANN)�����ȶ����ŵ��������ʶ������Ӧ����������о�, �������: MRAS����Ҫ������״̬������, ���Ҳ���ͬʱ���Ƶ���ĵ��衢 ��кʹ�������; ������H2/H���IJ���³�����Ʒ�����ANN����ʱ����д����ľ���������ݶȺͼ�Ȩ����, ��CPU��Ҫ���, ����ʵ�����ѶȽϴ�[6-11]�� �����������, ����������������ͨ�ֲ��ĵ�ͨ������BLDCM, �ں��Ի���Ӱ��������, ����AIOL����, ���߱�ʶ�������, ����Բ����仯������ϡ� �����IJ������, �Ա�ʶ�㷨���иĽ�, �Դ�����߿���ϵͳ�Ե������������Ӧ������
1 ����BLDCM�ĵ����Чģ��
���������ͨ�ֲ������β�����BLDCM, �ں�����ЧӦ��Ӱ��(��ΪBLDCM��Ϊת�ӱ������ṹ, �����ЧӦ��С), ������������״̬������Ʒ�ʽʱ, �����뻻�������(����������д�������������), ���������1��������Ϊ240�㷽��, �κ�ʱ��ֻ�����ർͨ, ����������ͷ��綯�ƴ�С�ֱ���ȡ� �����෴, ���, ����ɵ�ЧΪ���衢 ��к����Ŵ�����Ϊ����2���ĵ������ŵ��, ��������µ�ѹ�� ת�غ�ת��-�˶�����:

����: Rs, Ls, M��Ke�ֱ�Ϊ���������衢 �ԸС� ����֮�以�к����Ŵ���; R, L��KE�ֱ�Ϊ��Ч�ĵ�����衢 ��к����Ŵ���(R=2Rs, L=2(Ls-M), KE=2Ke); U��i�ֱ�Ϊ��Ч�������Ĺ����ѹ�͵���(���κ�ʱ��ͨ�������ߵ�ѹ���ߵ���); pn, ��e�ͦ�r�ֱ�Ϊ����������� ���ת�ٺͻ�еת��; Te, Tl��B�ֱ�Ϊ������ת�ء� ����ת�غ�ճ������ϵ����
���������̿ɼ�, �����������, ֻҪ����ȷ, ��BLDCM�ĵ��ת�����Ч�������Ĺ������������, ���, ͨ�������乩���ѹ�Ϳ��Ժܺõؿ��Ƶ���ĵ��ת�غ�ת�١� ���͵�BLDCM˫�ջ�����ϵͳԭ����ͼ1��ʾ, �ٶȵ���������ת��ƫ�����ָ�����, �������������ݵ���ƫ����������ѹU, ������·����λ���źŽ��л���, ʵ����ͬ��, �Ӷ������㶨�ĵ��ת�ء�

ͼ 1 ����BLDCM����ϵͳԭ����ͼ
Fig. 1 The block diagram of the typical speed control system of BLDCM
2 ����AIOL��BLDCM�������߹���
2.1 ����ԭ��
ʽ(1)�ɸ�дΪ���²�����ʽ��״̬����:
i=��T1��1+��2��2��(4)
����: ��1�ͦ�2Ϊϵ������; ��1�ͦ�2Ϊ״̬��, ����: ��1=[-R/L -Kepn/L]T, ��1=[i ��r]T, ��2=1/L, ��2=U�� �����Ʋ���Ϊ��1�ͦ�2, �����ֵ��Ϊ ��
�� , ����:
, ����:  ,
, ��
��
��ʽ(4), ���������U�ɱ�ʾΪ:

��ʽ(5)��֪, ��2Ϊ����0������, ����ʽ(4)��(5)����ʾϵͳ����Խ�Ϊ1, ���, ʽ(4)�ǿ�������-������Ի���, �������ƿ��û�������Ӧ����-������Ի���ʶ����, ���Ҷ��ڱ�ϵͳ, ֻҪ������Խ�С�ڻ����1������, �ȶ���ͬ���ܵõ���֤�� ����AIOL�ı�ʶ������ģ�Ͳο�����Ӧ(MRAS)�����IJ�֮ͬ������, ��Ҫ��״̬������, ֻ�ù��Ʋ������ϵͳδ֪����ʵ�������ɲο�ģ��, �ο�ģ���в�����������״̬��, ʹ����������ŵ������������Ӧ�ɽϼ�, ���ҿ�����ֱ�Ӹ��ݲο�ģ�͵ó�, ʹ������ʶ����������һ������ڵõ����, ������ʺϵ�������п���[12, 13]��
��AIOL����, �ο�ģ�ͷ��̿ɶ���Ϊ:

����: e=i-iref; g>0, ������ ����:

������2ʽ�ɵ�:

���, ��:

����Ŀ��������ŵ�������������Ͳ������, ��:

��ô:

Ϊ��֤���κ�ʱ����[AKV��](t)��0, ʹ�ñ�ʶ�㷨�Ľ����ȶ��Եõ�����, ȡ:

�� �� ���ٶ����������Ϊ�������, ����:
�� ���ٶ����������Ϊ�������, ����:

���, ��ʽ(5), ��ʶ�ڼ�������ٿ��Ʒ���Ϊ:

��������, ��ʶԭ����������ͼ2��ʾ�� BLDCM��������i��ת�ٵ���������ĵ���ָ��ֵiref����õ��������, ��ʽ(13)��ʾ�ı�ʶ�㷨���ϵ����ο�ģ�͵������, �����ݲο�ģ���ɵ���ָ��ֵiref�õ�������Ƶ�ѹU�����Ƶ������, ����ͨ�����ϱ�ʶ����, ʹ�õ��������ԽСʱ, �ο�ģ�Ͳ�������������������ƫ��ҲԽС, ����ʹ�ο�ģ�͵��������������BLDCM����������

ͼ 2 ����AIOL��BLDCM������ʶԭ����ͼ
Fig. 2 The block diagram of the parameter identification method based on AIOL
2.2 �����㷨��ȱ��
��ʽ(13)��֪, �����㷨��ȷ����BLDCM������ǰ����: ����������仯ʱ, �������Ҳ�ܷ�����Ӧ�仯�� ��ʵ����, ����BLDCM, ��ijЩ�����, ���ǰ���Dz����ڵġ� ����, �ٶ�L��U����, �ҵ�������̬�Ȼ�е��̬��ö�, ���r����Ϊ�Dz���ġ� ��R��KE�ֱ�仯Ϊ: R=R0+��R, KE=KE0+��KE(R0��KE0�ֱ�Ϊ���������仯ǰ�����Ч��������Ŵ�����ʼֵ), ��ʽ(4), �ڲ����仯ǰ�� ��, ��:

�ɼ�: ���۶���BLDCM, ���Ƕ�����ο�ģ��, �ڲ��������仯��������Ƶ���ǰ�� ��, �����R�ͦ�KE�����෴(��R��KE�ı仯�����෴, ʵ������ʱͨ����R����, KE��С), �Ҧ�R�ͦ�KE��һ����Χ��ȡֵʱ, ��ʽ(15)��֪, ���ǶԵ�����Ӧʽ(4)��Ӱ���ǻ��������, �п���ʹ�õ����仯����Ϊ0���������e���䡣 ��(13)��֪, ���ͬʱ���Ƶ����R��KE, ����Ʋ���������Ӧ����, ����п��ܵ��µ����������ֵ����ʵֵ���ϴ�
��Բ���ͼ2��ʾ��ʶ�㷨��BLDCM��������ϵͳ, ���������������֤�������, �����������������:
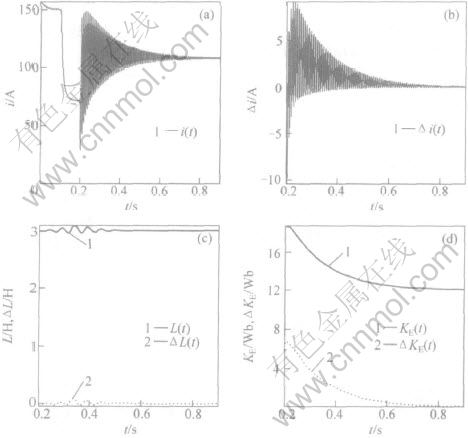
�������: R=24 m��, L=300 ��H, KE=18.5 mWb, pn=6, �ת�٦�rN=400 rad/s, ֱ������ѹVd=48 V, ת������J=5 g��m2, Tl=7.8 N��m, B=0; ���湤��Ϊ��ref=200 rad/s, ��0.2 sʱת���ȶ�, �����������ΪR=48 m��, ����ʶ���趨������ʼֵ��Ϊԭ�������, ȡg=8000, 0.2 s��ʶ��Ͷ��ʹ��, ͬʱ��ʶR, KE��L��
ͼ3��ʾΪϵͳ�ĵ����� ת�١� ���������Ӧ���� �ı�ʶ����ʶ������ߡ� �ɼ�, �ڱ�ʶ�ȶ���, ��Ȼ�������Ϊ0, ���������ת��Ҳ���ȶ�, ����
�ı�ʶ����ʶ������ߡ� �ɼ�, �ڱ�ʶ�ȶ���, ��Ȼ�������Ϊ0, ���������ת��Ҳ���ȶ�, ���� ����ƫ��,
����ƫ��,  ����ƫС�� ���, ����ͨ��AIOL����ͬʱ��ʶ�����R��KE�Dz���ȡ�ġ�
����ƫС�� ���, ����ͨ��AIOL����ͬʱ��ʶ�����R��KE�Dz���ȡ�ġ�
2.3 BLDCM�Ľ��Ļ���AIOL�Ĺ��Ʋ���
����R������֪��ʱ(��ΪR�����߲���������ʵ��), ���������ڱ�ʶʱR��KE�ı仯������ϡ� �����ĸ���Ӱ��, ��R�ɲ��ǰ���¿��Զ�KE��L��ȷ�ر�ʶ�� ���, �ԦȺͦ���������:
��=[1/L -KEpn]T, ��=[-Ri+U ��r],
��3=1/L, ��4=-KEpn/L, ��3=Ri+U, ��4=��r��

ͼ 3 �������Ч������ʱϵͳ��ʶ��Ӧ����
Fig. 3 The curves of the system identification response when the motor equivalent
resistance increase abruptly
ͼ 4 �Ľ��Ļ���AIOLϵͳ��ʶ��Ӧ����
Fig. 4 The curves of the system identification response of the improved identification
method based on AIOL
��Ȼ, ��ʶԭ����Ȼ��ʽ(6)~(14)��ʾ, ����ʶ�ڼ�������ٿ��Ʒ�����ӦΪ:

����ͼ3ͬ���ķ��湤����(���R��L����, 0.2 sʱ���������ΪKE=12 mWb), ����ʶ����R��Ϊ��֪, ֻͬʱ��ʶKE��L�� ͼ4��ʾΪϵͳ�ı�ʶ��Ӧ���ߡ� �ɼ�, �ı�ʶ�㷨�ܶԵ��KE��L�ı仯��ȷ����, �����������ܵõ���֤��
3 �� ��
�Ի������뻻���BLDCM, ���䵥���Чģ����Ϊ�о�����, ���û�������Ӧ����-������Ի�(AIOL)�IJ�����ʶ����, ����߿���ϵͳ�Ե������������Ӧ������ �о��ͷ����������: ����AIOL�������߱�ʶ�������, �������ʵ��������㷨������Ӧ��, ��������ʶ�����仯������ϡ� �����ĸ���Ӱ������ȷ�� �ȶ��ع��Ƶ������, ��ϵͳ����Ӧ���ܽϺ�, ����Ӧ�ɵĵ����ϼ�, ���ڹ���ʵ�֡�
�����:
[1]���. ֱ����ˢ�綯��ԭ����Ӧ��[M]. ����: ��е��ҵ������, 1996.
ZHANG Cheng. The Theory and Application of Brushless DC Motor[M]. Beijing: Mechanism Industry Press, 1996.
[2]����Զ. �ִ����ŵ�������������[M]. ����: ��е��ҵ������, 1997.
TANG Ren-yuan. Modern Permanent Magnet Machines��theory and Design[M]. Beijing: Mechanism Industry Press, 1997.
[3]�����, �²�ʱ, ��ƽƽ. ��ˢֱ���������ת�������ķ������䲹������[J]. �繤������־, 2000(8): 13-15.
ZHANG Xiang-jun, CHEN Bo-shi, ZHU Ping-ping. An analysis and a compensatioln method for commutation torque ripple in trapezoidal BLDC motor[J]. Electro-technical Journal, 2000(8): 13-15.
[4]Song J H, Choy I. Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J]. IEEE Trans on Power Electr, 2004, 19(2): 312-319.
[5]Carlson R, Lajoie-Mazenc M, Joao C, et al. Analysis of torque ripple due to phase commutation in brushless dc machines[J]. IEEE Trans on Ind Appl, 1992, 28(3): 632-638.
[6]Matsui n, Ohashi H. DSP based adaptive control of brushless motor[a]. IEEE IAS��88[C]. Pittsburgh, 1988. 375-380.
[7]Kim K H, Chung S K, Moon G W. Parameter estimation and control of permanent magnet synchronous motor drive using model reference adaptive technique[A]. IECON��95[C]. Orlando, 1995. 387-392.
[8]Li F J, Lin Y S. A robust PM synchronous motor drive with adaptive uncertainty observer[J]. IEEE Trans on Energy Conversion, 1999, 14(6): 989-995.
[9]Elbuluk M E, LIU Tong, Husain I. Neural-network-based model reference adaptive systems for high-performance motor drives and motion controls[J]. IEEE Trans on Ind Appl, 2002, 38(3): 879-886.
[10]Weisgerber S, Proca A, Keyhani A. Estimation of permanent magnet motor parameters[A]. IEEE IAS Annual Meeting[C]. New Orleaus, 1997. 29-34.
[11]Nakano M. Application of H�� control to motor speed control system[A]. IECON��91[C]. Tokyo, 1991. 839-842.
[12]������. ����Ӧ����[M]. ����: �廪��ѧ������, 1995.
HAI Zeng-jin. Adaptive Control[M]. Beijing: Tsinghua University Press, 1995.
[13]Tsakalis K S. Robustness of model reference adaptive controllers: an input-output approach[J]. IEEE Trans on Auto Contr, 1992, 37(5): 556-565.
�ո�����:2005-01-28
������Ŀ: �ߵ�ѧУ���������ʦ��ѧ���н����ƻ���Ŀ(�Ľ�˾[2001]183)
�����: �ҹ���(1976-), ��, ���������, ��ʿ�о���, ���µ�������������������Ƽ����о�
������ϵ��: �ҹ���, ��, ��ʿ�о���; �绰: 027-62997980(O); E-mail: zhenyujiel@sohu.com

