DOI: 10.11817/j.issn.1672-7207.2016.11.011
∑ÁĶÁ“∂∆¨ňęīłľ§’Ůľ”‘ō’Ů∂ĮŮÓļŌŐō–‘ľį ‘—ť—–ĺŅ
ŃőłŖĽ™1, 2£¨őŕĹ®÷–1£¨ņīŲő1
(1. Õ¨ľ√īů—ß Ľķ–Ķ”Žń‹‘īĻ§≥Ő—ß‘ļ£¨…Ōļ££¨201804£Ľ
2. ńŌ≤żĻ§≥Ő—ß‘ļ Ľķ–Ķ”ŽĶÁ∆ÝĻ§≥ŐŌĶ£¨Ĺ≠őų ńŌ≤ż£¨330099)
’™“™£ļ’Ž∂‘∑ÁĶÁ“∂∆¨ňęīłľ§’Ůľ”‘ōĻż≥Ő≥ŲŌ÷’Ů∂ĮŮÓļŌŐō–‘£¨∂‘“∂∆¨∆£ņÕľ”‘ōŌĶÕ≥ĹÝ––ļŌņŪľÚĽĮ£¨Ľý”ŕņ≠łŮņ »’∑Ĺ≥ŐĹ®ŃĘ∂ĮѶ—ß ż—ßń£–Õ°£ņŻ”√–°≤ő ż÷‹∆ŕ∆Ĺĺý∑®∂‘∆š‘ŕĻ≤’ŮŐűľĢŌ¬Ķń∑ý∆ĶŐō–‘ĹÝ––«ůĹ‚£¨Õ®ĻżŌŗ∆Ĺ√ś∑®Ķ√ĶĹ’Ů∂ĮŌĶÕ≥ĶńŮÓļŌŐō–‘ľįő»∂®–‘ŐűľĢ£¨∂‘ŌĶÕ≥’Ů∂ĮŮÓļŌĻż≥Ő÷ų“™”įŌž≤ő żĹÝ–– ż÷Ķ∑¬’ś°£‘ŕīňĽýī°…Ō∂‘ŌĶÕ≥ŮÓļŌÕ¨≤Ĺīę∂Į°Ę∂ĮŐ¨∑÷≤ŪŮÓļŌ°Ę’Ů∂ĮŮÓļŌÕ¨≤ĹŅō÷∆°Ę“∂∆¨ľ”‘ōĻż≥ŐĹÝ–– ‘—ť—–ĺŅ£¨—ť÷§ņŪ¬Ř∑÷őŲĶń’ż»∑–‘ľįŅō÷∆Ķń”––ß–‘£¨ő™ĹÝ“Ľ≤ĹŅ™∑ĘłŖ–ßĶń∑ÁĶÁ“∂∆¨∆£ņÕľ”‘ō ‘—ťŌĶÕ≥£¨ŐŠĻ©ņŪ¬Ř÷ß≥÷ļÕ ‘—ť“ņĺ›°£
ĻōľŁī £ļ∑ÁĶÁ“∂∆¨£Ľ∆£ņÕ ‘—ť£Ľňęīłľ§’Ů£ĽŮÓļŌ
÷–Õľ∑÷ņŗļŇ£ļTH112 őńŌ◊ĪÍ÷嬎£ļA őń’¬ĪŗļŇ£ļ1672-7207(2016)11-3692-08
Experimental study and coupling characteristics of double hammer Double HammerDouble HammerDouble Hammerexcitation fatigue loading system
LIAO Gaohua1, 2, WU Jianzhong1, LAI Xin1
(1. College of Mechanical Engineering, Tongji University, Shanghai 201804, China;
2. Department of Mechanical and Electrical Engineering, Nanchang Institute of Technology, Jiangxi 330099, China)
Abstract: The double hammer excitation fatigue loading system was simplified for the coupling-problem occurring in case of wind turbine blade loading multi-point excitation. The dynamic mathematical model was established based on lagrange equations by using the two eccentrical blocks°Į vibration loading as object. Electromechnical coupling equations for the system was constructed and then the electromechanical coupling was solved by using the small parameter cycle average method in resonance conditions. The electromechnical coupling characteristics and stability conditions of vibration system were obtained by the phase plane method. The mechanism of system coupling was revealed. On this basis, the mechanical and electrical coupling characteristics of primary resonance, system dynamic bifurcation coupling and synchronization control were studied. The coupling characteristics of dynamic bifurcation and avoiding method were obtained. Finally, the correctness of theoretical analysis through the test provides guidance for the engineering application of the fatigue loading system.
Key words: wind turbine blade; fatigue test; double excitation; coupling
∆£ņÕňū…ň «Ķľ÷¬“∂∆¨ňūĽĶĶń÷ų“™‘≠“Ú÷ģ“Ľ£¨÷Ľ”–ĹÝ––»ę≥ŖīÁ“∂∆¨Ķń∆£ņÕ≤‚ ‘≤Ňń‹ŐŠĻ©∂‘…Ťľ∆ĶńŅ…ŅŅ»∑»Ō[1-2]°£ĻķÕ‚∑ÁĶÁ≤ķ“Ķľľ ű∑Ę’ĻļÕ”¶”√∆ū≤ĹĹŌ‘Á£¨∂‘”ŕ“∂∆¨∆£ņÕŌŗĻōő Ő‚Ķń∑÷őŲ“≤ĹÝ––ŃňīůŃŅĶń—–ĺŅŐĹŐ÷£¨ĽżņŘŃňĹŌ∂ŗĶńľž≤‚ĺ≠—ť£¨ńŅ«įĶ§¬ůLMĻęňĺ°Ę√ņĻķNRELļÕļ…ņľWMCĶ»∂‘∂ŗ÷ŠļÕ∂ŗĶ„ľ”‘ōĶ»–¬∑Ĺ∑®ĹÝ––—–ĺŅ[3]°£Ļķńŕ∑ÁĶÁ…ŤĪł≤ķ“Ķňš»Ľ∑Ę’ĻĹŌÕŪ£¨Ķę∑ÁĶÁ“∂∆¨∆£ņÕ ‘—ťľž≤‚ľľ ű”–ĹŌŅž∑Ę’Ļ£¨ľž≤‚ľľ ű—–ĺŅ“—ĹÝ»Ž––Ń–Ō»ĹÝ£¨∑ÁĶÁ“∂∆¨ľž≤‚“—ĺ≠–ő≥…Õ‚◊ ∆ů“Ķ°Ę√Ů”™∆ů“Ķ°Ę—–ĺŅ‘ļňýĶ»∂ŗ‘™ĽĮĶńÕ∂◊ –ő Ĺ°£”…”ŕ…ŤĪł≥…ĪĺĶÕĶ»”ŇĶ„£¨÷–ĻķŅ∆—ß‘ļĻ§≥Ő»»őÔņŪ—–ĺŅňý°Ę…Ōļ£≤£Ńßł÷—–ĺŅ‘ļĶ»Ķ•őĽ≤…”√∆ę–ńŅťĻ≤’Ůľ”‘ōń£ ĹĹÝ––Ķ•Ķ„Ķ•÷Š∆£ņÕľ”‘ō ‘—ť[4]°£∆ę–ńŅťĹŠĻĻĶńľ”‘ōŌĶÕ≥”…∆£ņÕľ”‘ō÷ß◊ý°Ę∆ę–ń÷ ŃŅŅť°Ę“∂∆¨ľ–ĺŖ°ĘĶÁĽķ°ĘľűňŔŌšľįĶÁŅōŌĶÕ≥Ķ»◊ť≥…£¨∆ę–ńŅťľ”‘ō◊į÷√”Ž“∂∆¨÷ģľšÕ®ĻżńĺįįŌŗѨ[5]°£īů–Õ∑ÁѶ∑ĘĶÁĽķ◊ť «ő“ĻķļÕ ņĹÁ∑ĘīÔĻķľ“őīņīľłńÍĶń∑Ę’Ļ«ų ∆£¨ňś“∂∆¨≥§∂»Ķń‘Ųľ”£¨»Š∂»ļÕ◊ŤńŠļńń‹Ķń‘Ųīů£¨ľ”‘ō…ŤĪłňý–ŤĻ¶¬ “≤ňś÷ģ‘Ųīů°£Õ®Ļż‘Ųľ”∂ĮѶŌĶÕ≥ĻōľŁ≤ő ż∆ę–ńŅť÷ ŃŅľį–ż◊™ĪŘ≥§ňýīÝņīĶńő Ő‚ «ľ”‘ōѶĶ„”Ž“∂∆¨ľš∆ęĺōľ”īů£¨ľ”‘ōѶ”Ž“∂∆¨ŮÓļŌłŁ—Ō÷ō£¨«“…ŤĪł≥…Īĺ‘Ųľ”°£īłŃ™∂Įľ§’Ůľ”‘ō∑ÁĶÁ“∂∆¨£¨∂‘“∂∆¨ ©ľ”łŁļŌņŪĶńľ”‘ōѶ£¨Ĺ‚ĺŲŃňĶ•Ő®ľ§’ŮīłĻ¶¬ ”–ŌřĶńő Ő‚£¨Õ¨ Ī“∂∆¨ ‹ĶĹĶń ‘—ť‘ōļ…łŁ∑ŻļŌ…Ťľ∆‘ōļ…£¨ňű∂Ő ‘—ť Īľš°£‘ŕ Ķľ ”¶”√÷–£¨ľ§’Ůľ”‘ōĻż≥Ő÷–Ķńīś‘ŕ∑«ŌŖ–‘ľį∂ĮѶŮÓļŌĶ»ő Ő‚£¨∆š∂ĮѶ—ß–‘ń‹ĪšĶ√łī‘”[6]°£ľ§’ŮŌĶÕ≥īś‘ŕ÷ųĻ≤’Ů°Ęīő–≥≤®“‘ľį≥¨–≥≤®Ļ≤’Ů£¨‘ŕĻ≤’Ů«ťŅŲŌ¬£¨ĹŌ–°∑ý∂»ĶńÕ‚≤Ņľ§ņÝĺÕĽŠ≤ķ…ķļ‹īůĶńŌž”¶£¨…ű÷ŃĽŠ≥ŲŌ÷ŐÝ‘ĺŌ÷Ōů°£Ľý”ŕ…Ō Ų‘≠“Ú£¨Īĺőń◊ų’Ŗ∂‘ŃĹ∆ę–ńŅť«ż∂Į∆£ņÕľ”‘ōŌĶÕ≥£¨Ĺ®ŃĘ∂ĮѶ—ß ż—ßń£–Õ£¨«ůĹ‚ŌĶÕ≥Ķń∑ý∆ĶŐō–‘£¨—–ĺŅľ”‘ōŌĶÕ≥Ķń’Ů∂Į––ő™£¨∑÷őŲ∆š‘ŕĻ≤’ŮŐűľĢŌ¬ĶńŮÓļŌŐō–‘ľįő»∂®–‘ŐűľĢ£¨Ķ√≥ŲĽýĪĺĶńŮÓļŌĻś¬…£¨≤ĘÕ®Ļż ‘—ť—–ĺŅ£¨—ť÷§ņŪ¬Ř∑÷őŲĶń’ż»∑–‘ľįŅō÷∆Ķń”––ß–‘°£
1 ŌĶÕ≥∂ĮѶ—ßń£–Õľį«ůĹ‚
‘ŕ∆£ņÕľ”‘ōŌĶÕ≥÷–£¨ľ”‘ō◊į÷√”Ž∑ÁĶÁ“∂∆¨÷ģľšÕ®Ļżľ–ĺŖŌŗѨ°£łýĺ›őńŌ◊[5, 7]£¨∂‘ŌĶÕ≥Ĺ®ń£ Ī◊ųŃň»ÁŌ¬ļŌņŪľŔ…Ť£ļ1) “∂∆¨ĹŁň∆ő™ŌŖ–‘ĶĮ–‘ŐŚ£¨“∂∆¨‘ŕ’Ů∂ĮĻż≥Ő÷– ‹ĶĹĶĮ–‘Ѷľį◊ŤńŠŃ¶◊ų”√£¨ł’∂»ŌĶ żő™∑÷∂őļĮ ż£¨≤ĽÕ¨∑∂őßńŕĺŖ”–≤ĽÕ¨ĶńĶĮ–‘ŌĶ ż£¨«““∂∆¨ū§–‘◊ŤńŠ∆ū÷ų“™◊ų”√£¨“∂∆¨ ķ÷Ī∑ĹŌÚĶń◊ŤńŠŃ¶ļÕĶĮ–‘Ѷ∑÷Īūő™ňŔ∂»ļÕőĽ“∆ĶńŌŖ–‘ļĮ ż£Ľ2) ѨŔľ–ĺŖ”Žľ”‘ō‘īĺýő™ĺý÷ ł’ŐŚ£¨“∂∆¨◊Ų∆Ĺ√ś‘ň∂Į°£‘ŕ…Ō ŲľŔ…Ť«įŐŠŌ¬£¨łýĺ›∆£ņÕľ”‘ō ‘—ťĻż≥Ő£¨Ĺ®ŃĘŌĶÕ≥∂ĮѶ—ßń£–Õ»ÁÕľ1ňý ĺ°£Õľ1÷–Oő™’Ů∂ĮŐŚ÷ –ń£¨Ĺ®ŃĘĽýī°◊ÝĪÍŌĶOxy£¨Ń¶—ßń£–Õő™“Ľ÷÷ĺŖ”–∂‘≥∆∑«ŌŖ–‘ĶĮ–‘ĶńŌĶÕ≥£¨Ķ•őĽ÷ ŃŅ…ŌĶĮ–‘ѶļĮ żp(y)°£

Õľ1 “∂∆¨ľ§’ŮѶ—ßń£–Õ
Fig. 1 Blade vibration mechanical model
m1ļÕm2ő™ľ§’Ůīł÷ ŃŅŅťĶń÷ ŃŅ£¨m0ő™“∂∆¨÷ ŃŅ£¨”…”ྦྷ’Ůīł◊į÷√”Ž“∂∆¨÷ģľš√Ľ”–Ōŗ∂‘őĽ“∆£¨Ļ Ĺę∆šŅī≥…’ŻŐŚ£¨mő™’Ů∂ĮŐŚ◊‹÷ ŃŅ£¨ £¨k1ļÕk2ő™“∂∆¨Ķ•őĽ÷ ŃŅ…ŌĶńł’∂»ŌĶ ż£¨
£¨k1ļÕk2ő™“∂∆¨Ķ•őĽ÷ ŃŅ…ŌĶńł’∂»ŌĶ ż£¨ £¨
£¨ °£
°£

 (1)
(1)
’Ů∂ĮŐŚ‘ŕOxy∆Ĺ√śńŕ‘ň∂Į£¨”…īÔņ Īī∂ŻŃ¶—ß‘≠ņŪŅ…Ķ√ľ”‘ōŌĶÕ≥Ķń’Ů∂Į∑Ĺ≥Őő™
 (2)
(2)
Ĺ÷–£ļ ő™∆ę–ńŅťĽō◊™Ĺ«(
ő™∆ę–ńŅťĽō◊™Ĺ«( )£Ľviő™ľ§’Ů∆Ķ¬ £Ľriő™∆ę–ńŅť∆ę–ńĺŗ£Ľ2
)£Ľviő™ľ§’Ů∆Ķ¬ £Ľriő™∆ę–ńŅť∆ę–ńĺŗ£Ľ2 ő™ŃĹľ§’Ůīł∆ę–ńŅťŌŗőĽ≤Ó£Ľ
ő™ŃĹľ§’Ůīł∆ę–ńŅťŌŗőĽ≤Ó£Ľ ”Ž
”Ž ő™Ķ•őĽ÷ ŃŅ…Ōňý 徧’ŮѶĶń∑ý÷Ķ£Ľ
ő™Ķ•őĽ÷ ŃŅ…Ōňý 徧’ŮѶĶń∑ý÷Ķ£Ľ ő™–°≤ő żŃŅ£Ľ
ő™–°≤ő żŃŅ£Ľ ő™◊ŤńŠĪ»£Ľ
ő™◊ŤńŠĪ»£Ľ ő™ĻŐ”–∆Ķ¬ °£
ő™ĻŐ”–∆Ķ¬ °£
∆£ņÕľ”‘ōŌĶÕ≥≤…”√»żŌŗ“ž≤ĹĶÁĽķ£¨Ľý”ŕ∆š∂ĢŌŗÕ¨≤Ĺ–ż◊™◊ÝĪÍŌĶŌ¬Ķń ż—ßń£–Õ£¨◊īŐ¨∑Ĺ≥Ő[8]Ņ…ĪŪ ĺő™£ļ

 (3)
(3)
 (4)
(4)
Ĺ÷–£ļ ļÕ
ļÕ ő™∂®◊”∂ňĶÁ—Ļ£Ľ
ő™∂®◊”∂ňĶÁ—Ļ£Ľ ļÕ
ļÕ ő™Ķń◊™◊”∂ňĶÁ—Ļ£Ľ
ő™Ķń◊™◊”∂ňĶÁ—Ļ£Ľ ļÕ
ļÕ ∑÷Īūő™∂®◊”∂ňĶÁŃų£Ľ
∑÷Īūő™∂®◊”∂ňĶÁŃų£Ľ ļÕ
ļÕ ő™◊™◊”∂ňĶÁŃų£Ľ
ő™◊™◊”∂ňĶÁŃų£Ľ ļÕ
ļÕ ∑÷Īūő™∂®°Ę◊™◊”ĶÁ◊Ť£Ľ
∑÷Īūő™∂®°Ę◊™◊”ĶÁ◊Ť£Ľ ļÕ
ļÕ ∑÷Īūő™∂®°Ę◊™◊”◊‘ł–£Ľ
∑÷Īūő™∂®°Ę◊™◊”◊‘ł–£Ľ ő™∂®°Ę◊™◊”Ľ•ł–£Ľ
ő™∂®°Ę◊™◊”Ľ•ł–£Ľ ļÕ
ļÕ ∑÷Īūő™Õ¨≤Ĺ–ż◊™Ĺ«ňŔ∂»ļÕ◊™◊”Ĺ«ňŔ∂»£ĽDő™ń¶≤Ńľį∑Á◊Ť◊ŤŃ¶ĺōŌĶ ż£ĽJő™Ľķ◊ťĶń◊™∂ĮĻŖŃŅ°£
∑÷Īūő™Õ¨≤Ĺ–ż◊™Ĺ«ňŔ∂»ļÕ◊™◊”Ĺ«ňŔ∂»£ĽDő™ń¶≤Ńľį∑Á◊Ť◊ŤŃ¶ĺōŌĶ ż£ĽJő™Ľķ◊ťĶń◊™∂ĮĻŖŃŅ°£
Ĺ(2)~(4)ĻĻ≥…ŃňŃĹīłľ§’Ůľ”‘ōŌĶÕ≥’Ů∂ĮŮÓļŌ ż—ßń£–Õ°£ī” ż—ßń£–Õ…ŌŅī «“ĽłŲ∂ŗĪšŃŅŮÓļŌĶń∑«ŌŖ–‘ŌĶÕ≥£¨ľ”‘ōŌĶÕ≥”Ž“∂∆¨‘ň∂Į÷ģľšīś‘ŕ◊ŇŌŗĽ•ŮÓļŌĻōŌĶ°£
ŃĹľ§’Ůīł‘ŕ∆Ķ¬ ŌŗĶ»ŐűľĢŌ¬( )£¨…Ť‘ŕ÷ųĻ≤’Ů«ÝłĹĹŁ Ī¬ķ◊„ĻōŌĶ Ĺ
)£¨…Ť‘ŕ÷ųĻ≤’Ů«ÝłĹĹŁ Ī¬ķ◊„ĻōŌĶ Ĺ £¨‘Ú Ĺ(2)Ņ…–īő™
£¨‘Ú Ĺ(2)Ņ…–īő™
 (5)
(5)
Ĺ÷–£ļ ő™∑«ŌŖ–‘ļĮ ż£¨ňŁ”Ž–°≤ő żŃŅŌŗĻō£¨∑ī”≥Ķń «»ű∑«ŌŖ–‘ŌĶÕ≥°£
ő™∑«ŌŖ–‘ļĮ ż£¨ňŁ”Ž–°≤ő żŃŅŌŗĻō£¨∑ī”≥Ķń «»ű∑«ŌŖ–‘ŌĶÕ≥°£
ņŻ”√∆Ĺĺý∑®[9]∂‘ Ĺ(5)ĹÝ––«ůĹ‚£¨√Ņ“ĽłŲ÷‹∆ŕńŕ»Ōő™∆š’Ů∂Įő™ľÚ–≥’Ů∂Į£¨ĶęŌ¬“ĽłŲ’Ů∂ĮĶń’Ů∑ý”ŽŌŗőĽĹ«∑Ę…ķőĘ–°ĶńłńĪš°£…ŤĹ‚ő™
 (6)
(6)
Ĺ÷–£ļ≤ő ż ļÕ
ļÕ ĺýő™ ĪľštĶń¬żĪšļĮ ż°£
ĺýő™ ĪľštĶń¬żĪšļĮ ż°£
Ĺę ļÕ
ļÕ īķ»Ž Ĺ(4)£¨«ů≥Ų
īķ»Ž Ĺ(4)£¨«ů≥Ų ”Ž
”Ž ĶńĪŪīÔ Ĺ£¨į—”ŽĪŪīÔ≥…”Ž–°≤ő żŃŅŌŗĻōŃŅ£ļ
ĶńĪŪīÔ Ĺ£¨į—”ŽĪŪīÔ≥…”Ž–°≤ő żŃŅŌŗĻōŃŅ£ļ


 (7)
(7)



 (8)
(8)
∂‘ Ĺ(7)ļÕ Ĺ(8)÷–Ķń≤ő żvt‘ŕ ńŕ»°∆Ĺĺý÷Ķ£¨≤Ę”…ő»Ő¨Ĺ‚ŐűľĢő™
ńŕ»°∆Ĺĺý÷Ķ£¨≤Ę”…ő»Ő¨Ĺ‚ŐűľĢő™ £¨
£¨ £¨Ķ√£ļ
£¨Ķ√£ļ
 (9)
(9)
Ĺ÷–£ļ °£
°£
ŃÓ £¨∂‘”ŕ∑÷∂őŌŖ–‘ļĮ ż£¨ĹÝ––∑÷∂őĽż∑÷«ůĹ‚
£¨∂‘”ŕ∑÷∂őŌŖ–‘ļĮ ż£¨ĹÝ––∑÷∂őĽż∑÷«ůĹ‚ īķ»Ž Ĺ(9)Ķ√ĶĹ∑ý∆ĶŐō–‘ĪŪīÔ Ĺ£ļ
īķ»Ž Ĺ(9)Ķ√ĶĹ∑ý∆ĶŐō–‘ĪŪīÔ Ĺ£ļ
 (10)
(10)
Ĺ÷–£ļ
 ,
,
Õ®Ļż Ĺ(10)Ľś≥Ų∆£ņÕľ”‘ōľ§’ŮŌĶÕ≥∑ý∆Ķ”ŽŌŗőĽ≤Ó÷ģľšŐō–‘«ķŌŖīō£¨»ÁÕľ2ňý ĺ°£”…Õľ2÷–«ķŌŖĪšĽĮ«ų ∆Ņ…“‘Ņī≥Ų£ļ”…”ŕŌĶÕ≥ĶńĶĮĽ…ł’∂»∑Ę…ķĪšĽĮ£¨ ĻĶ√ŌĶÕ≥ĶńĻŐ”–∆Ķ¬ «ķŌŖ∑Ę…ķ∆ę“∆°£ňś◊ŇŌŗőĽ≤Óľű–°£¨’Ů∑ýľ”īů£¨ŌĶÕ≥Ķń∑«ŌŖ–‘Őō–‘‘Ĺ√ųŌ‘°£∑ý∆Ķ«ķŌŖ÷–ĶńAB∂őő™≤Ľő»∂®≤Ņ∑÷£¨őĽ“∆≥ŲŌ÷Ńň’Ů∑ýŐÝ‘ĺĶ»Ō÷Ōů°£
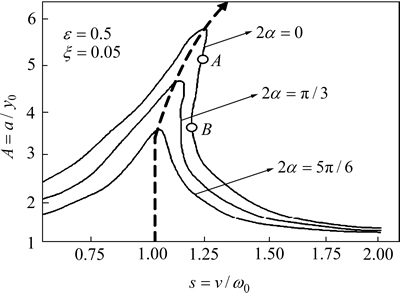
Õľ2 ’Ů∂Į∑ý∆ĶŐō–‘«ķŌŖīō
Fig. 2 Amplitude frequency characteristic curves
2 ĽķĶÁŮÓļŌŐō–‘ľįő»∂®–‘ŐűľĢ
’Ů∂ĮŮÓļŌ≤ķ…ķĶńÕ‚“Ú «’Ů∂Į◊īŐ¨”įŌžĶÁĽķłļ‘ō◊™ĺōĶńĪšĽĮ£¨»°“ĽłŲ’Ů∂Į÷‹∆ŕńŕłļ‘ō◊™ĺōĶń∆Ĺĺý÷Ķ∑ī”≥ŮÓļŌĻś¬…°£”…∑«ŌŖ–‘∆Ĺĺý∑®ĶńňľŌŽ£¨ļÕ‘ŕ“ĽłŲ÷‹∆ŕńŕĹŁň∆ĶōŅī≥…≤ĽĪš£¨”… Ĺ(6)Ņ…Ķ√’Ů∂Įľ”ňŔ∂» £¨ĶŕiŐ®ľ§’Ůīł∆ę–ńŅťňý ‹Ķńłļ‘ō◊™ĺōő™
£¨ĶŕiŐ®ľ§’Ůīł∆ę–ńŅťňý ‹Ķńłļ‘ō◊™ĺōő™
 (11)
(11)
Ĺ÷–£ļ °£
°£
”… Ĺ(11)Ņ…÷™£ļÕ‚łļ‘ōŐō–‘”Ž’Ů∂ĮŌĶÕ≥Ķń∑ý∆ĶŐō–‘«ķŌŖŌŗĻō£¨ľ§’ŮŌĶÕ≥Ķń’Ů∂ĮŐō–‘ĽŠ÷ĪĹ””įŌžĶÁĽķĶńÕ‚łļ‘ōŐō–‘£¨‘ž≥…ŃňŮÓļŌĶńŐō ‚–‘£¨’Ů∂Įľ”ňŔ∂»“≤ĽŠ≥ŲŌ÷ŐÝ‘ĺ“‘ľįĶÁĽķÕ‚łļ‘ōĽŠ≥ŲŌ÷ÕĽĪš°£
∂‘”ŕ“∂∆¨ľ”‘ōŌĶÕ≥ľ§’ŮīłĶńĶÁĽķ÷ŠŌĶ£¨∆š‘ň∂Į∑Ĺ≥ŐŅ…ĪŪ ĺő™
 (12)
(12)
Ĺ÷–£ļJ1ļÕJ2∑÷Īūő™ĶÁĽķ1ļÕĶÁĽķ2–ż◊™÷ŠĶń◊™∂ĮĻŖŃŅ£Ľc1ļÕc2∑÷Īūő™ĶÁĽķ1ļÕĶÁĽķ2–ż◊™÷ŠĶń◊ŤńŠŌĶ ż£ĽT1ļÕT2∑÷Īūő™ĶÁĽķ1ļÕĶÁĽķ2–ż◊™÷ŠĶńĶÁīŇ◊™ĺō£Ľm1r1ļÕm2r2ő™–ż◊™∆ę–ńŅťĶń∆ę–ńĺō°£
…ŤŃĹľ§’ŮīłĶńĽķ–Ķ≤ő ż“Ľ÷¬£¨Ĺęīķ»Ž Ĺ(12)ĽĮľÚĶ√ĶĹŌĶÕ≥∆Ĺļ‚∑Ĺ≥Őő™
 (13)
(13)
…ŤňŔ∂»≤Ó £¨◊™ňŔ≤ÓĶńĪšĽĮ¬
£¨◊™ňŔ≤ÓĶńĪšĽĮ¬  £¨ĶÁĽķĶńĶÁīŇ◊™ĺō≤Ó
£¨ĶÁĽķĶńĶÁīŇ◊™ĺō≤Ó £¨ŌŗőĽ≤Ó
£¨ŌŗőĽ≤Ó £¨≤Ę«“÷ĽŅľ¬«ľ§’Ůīł÷ģľšŮÓļŌĶń”įŌž£¨ĶĪŃĹľ§’Ůīł ĶŌ÷Õ¨≤Ĺ’Ů∂Į◊īŐ¨ Ī(
£¨≤Ę«“÷ĽŅľ¬«ľ§’Ůīł÷ģľšŮÓļŌĶń”įŌž£¨ĶĪŃĹľ§’Ůīł ĶŌ÷Õ¨≤Ĺ’Ů∂Į◊īŐ¨ Ī( ,
,  )£¨◊īŐ¨Ķ„(
)£¨◊īŐ¨Ķ„( )ő™∆Ĺļ‚∆śĶ„°£ŃÓ
)ő™∆Ĺļ‚∆śĶ„°£ŃÓ £¨Ĺę∆Ĺļ‚∆śĶ„ĪšĽĽĶĹ(0,0)£¨Ĺę Ĺ(13)◊™ĽĽ≥…∆Ĺ√ś∂ĮѶŌĶÕ≥ŌŗĻžľ£–ő Ĺ£¨Ņ…Ķ√ĶĹ£ļ
£¨Ĺę∆Ĺļ‚∆śĶ„ĪšĽĽĶĹ(0,0)£¨Ĺę Ĺ(13)◊™ĽĽ≥…∆Ĺ√ś∂ĮѶŌĶÕ≥ŌŗĻžľ£–ő Ĺ£¨Ņ…Ķ√ĶĹ£ļ

 (14)
(14)
Ĺ÷–£ļ
Ĺ(14)Ķń—ŇŅňĪ»ĺō’ůAő™£ļ
 (15)
(15)
…Ť£ļ
 (16)
(16)

 (17)
(17)

 (18)
(18)
ĶĪŃĹĶÁĽķŐō–‘Ōŗ≤ÓĹŌīů Ī( ĹŌīů)£¨”… Ĺ(16)Ķ√ p£ĺ0£¨”…∆śĶ„Ň–Īū◊ľ‘Ú£¨ŌĶÕ≥◊īŐ¨ «≤Ľő»∂®Ķń°£ĶĪŃĹĶÁĽķŐō–‘ŌŗĹŁ Ī£¨p£ľ0£¨”…∑«ŌŖ–‘ŌĶÕ≥∆Ĺļ‚Ķ„ő»∂®–‘◊ľ‘ÚŅ…÷™£¨“™ ĻŌĶÕ≥∆śĶ„ņŗ–Õő™Ĺ•ĹŁő»∂®ĹĻĶ„ĶńŐűľĢő™£ļ
ĹŌīů)£¨”… Ĺ(16)Ķ√ p£ĺ0£¨”…∆śĶ„Ň–Īū◊ľ‘Ú£¨ŌĶÕ≥◊īŐ¨ «≤Ľő»∂®Ķń°£ĶĪŃĹĶÁĽķŐō–‘ŌŗĹŁ Ī£¨p£ľ0£¨”…∑«ŌŖ–‘ŌĶÕ≥∆Ĺļ‚Ķ„ő»∂®–‘◊ľ‘ÚŅ…÷™£¨“™ ĻŌĶÕ≥∆śĶ„ņŗ–Õő™Ĺ•ĹŁő»∂®ĹĻĶ„ĶńŐűľĢő™£ļ £ĺ0£¨‘Ú£ļ
£ĺ0£¨‘Ú£ļ
 £ĺ
£ĺ (19)
(19)
”… Ĺ(19)Ņ…÷™£ļĶĪŌĶÕ≥Ķń’Ů∂Į◊īŐ¨”Ž’Ů∂Į≤ő ż¬ķ◊„“Ľ∂®ĻōŌĶ Ī£¨ŌŗőĽ≤Ó«ųĹŁ”ŕń≥ĻŐ∂®÷Ķ[10]°£ľ”īů∆ę–ńĺōm0r0°Ę◊™∂ĮĻŖŃŅJ0ľį’Ů∑ýa£¨ľű–°–ż◊™÷ŠĶń◊ŤńŠŌĶ żc0£¨≤Ę«““™ĺ°ŃŅ Ļ”√‘ň––Őō–‘“Ľ÷¬°Ę≤ő żŌŗÕ¨ĶńĶÁĽķ(ĺ°ŃŅ–°)£¨”–ņŻ”ŕŌĶÕ≥Ķńő»∂®–‘°£
3 ŌĶÕ≥’Ů∂ĮŮÓļŌŐō–‘ ż÷Ķ∑¬’ś
≤…”√Matlab/Simulink»ŪľĢ∂‘ņŪŌŽ◊īŐ¨Ō¬ľ”‘ōĻż≥ŐĹÝ–– ż÷Ķ∑¬’ś°£≤őŅľIEC61400-23∑ÁĶÁĽķ◊ť“∂∆¨Ļś∑∂”ŽőńŌ◊[7, 11]£¨∑¬’ś Ī“‘9 m“∂∆¨ő™≤őŅľľ”‘ō∂‘Ōů£¨—°»°“∂∆¨∆£ņÕľ”‘ōŌĶÕ≥Ķńįŕīł÷ ŃŅm1=30 kg£¨“∂∆¨÷ ŃŅm2=360 kg£¨‘ŕ“∂∆¨ŃĹľ”‘ōĶ„ī¶Ķńł’∂»ŌĶ żĹŁň∆ő™k1=15.8 kN/m£¨k2=17.5 kN/m£¨◊ŤńŠĹŁň∆ő™350 (N°§s)/m°£ľŔ∂®ŃĹľ§’ŮīłĶńĽķ–ĶĹŠĻĻ°Ęľłļő≥ŖīÁ°ĘĶÁĽķ–‘ń‹Ķ»≤ő ż“Ľ÷¬£¨ĹÝ–– ż÷Ķ∑¬’ś°£
ĶĪŃĹľ§’ŮīłĶÁĽķ◊™ňŔŌŗĶ»Ķń∑¬’śĹŠĻŻ»ÁÕľ3ňý ĺ°£”…Õľ3Ņ…“‘Ņī≥Ų£ļ‘ŕņŪŌŽ«ťŅŲŌ¬ŌŗőĽ≤ÓĽŠ÷ū≤Ĺ ’Ń≤”ŕ0 rad£¨≤Ę«“ĶÁĽķ◊™ňŔ‘ŕ“Ľ∂®∑∂őßńŕ‘ĹłŖ£¨ ’Ń≤ĶńňŔ∂»‘ĹŅž£¨ĶęĶĪĶÁĽķĶń◊™ňŔīÔĶĹ400 r/min Ī£¨ŌŗőĽ≤ÓĽŠ«ų”ŕ∑«Ń„÷Ķ£¨»ÁÕľ3(a)ňý ĺ£¨ňĶ√ųń‹ ĻŌŗőĽ≤Ó ’Ń≤”ŕ0 radĶńĶÁĽķ◊™ňŔ”–ľęŌř÷Ķ£¨ł√÷Ķ”Ž“∂∆¨≤ő ż°Ęľ”‘ōŌĶÕ≥≤ő żĶ»√‹«–ŌŗĻō°£…Ť∂®≤ĽÕ¨≥ű ľŌŗőĽ≤ÓĶń∑¬’śĹŠĻŻ»ÁÕľ3(b)ňý ĺ£¨‘ŕ≤ĽÕ¨Ķń≥ű ľŌŗőĽ≤ÓĶń«ťŅŲŌ¬£¨ŌŗőĽ≤Ó∂ľń‹«ų”ŕ0 radĽÚń≥łŲĻŐ∂®÷Ķ£¨≥ű ľŌŗőĽ≤Ó‘Ĺ–°£¨ ’Ń≤ňŔ∂»‘ĹŅž°£
łýĺ›GL∑ÁĶÁĽķ◊ťĻś∑∂“∂∆¨ĪÍ◊ľ£¨ľ§’Ůīł2ĻŐ∂®‘ŕ“∂∆¨’ĻŌÚ70%ī¶£¨ľ§’Ůīł1‘ŕ“∂∆¨’ĻŌÚőĽ÷√–°”ྦྷ’Ůīł2£¨«“ŃĹ’Ŗ÷ģľšĶńį≤◊įĺŗņŽLs£¨ŃĹĶÁĽķĶń◊™ňŔĹ‘…Ť÷√ő™210 r/min°£Õľ4ňý ĺő™ŃĹľ§’Ůīł÷ģľšĶńį≤◊įĺŗņŽLs∂‘ŮÓļŌĶń”įŌž°£”…Õľ4Ņ…÷™£ļňś◊Ňį≤◊įĺŗņŽLsĶńľ”īů£¨ŌŗőĽ≤Ó«ų”ŕ0 radĽÚń≥łŲĻŐ∂®÷ĶĶń«ų ∆‘Ĺ«Ņ°£ĶĪŃĹľ§’Ůīłį≤◊įĺŗņŽ‘Ĺīů Ī£¨’Ů∂Į◊īŐ¨÷–∆ę◊™’Ů∂Į’ľ”–Ķń≥…∑÷ľ”īů£¨ŌŗőĽ≤Ó”–«ų”ŕ0 radĶń«ų ∆°£

Õľ3 ņŪŌŽ◊īŐ¨Ō¬Ķń◊‘Õ¨≤ĹĻż≥Ő
Fig. 3 Process of self-synchronization in ideal state
Õľ4 ľ§’Ůīłį≤◊įĺŗņŽĶń”įŌž
Fig. 4 Effect of installation distance
≤ĽÕ¨«ż∂Į∆Ķ¬ ∂‘ŌĶÕ≥Õ¨≤Ĺľ”‘ō Ī£¨“∂∆¨’Ů∑ý«ķŌŖ»ÁÕľ5ňý ĺ°£ĶĪŃĹľ§’ŮīłĽō◊™ňŔ∂»ŌŗÕ¨≤ĘŔţ”ŕ“∂∆¨ĻŐ”–∆Ķ¬ (◊™ňŔ220 r/min) Ī£¨’Ů∂Į«ų”ŕÕ¨≤Ĺ£¨“∂∆¨’Ů∑ýĽŠ”…◊Ó≥űĶń≤®∂Į◊īŐ¨÷ūĹ•«ų”ŕő»∂®£¨»ÁÕľ5(a)ňý ĺ£¨’‚÷÷’Ů∂ĮŌ÷Ōů «°įľ”‘ō«ż∂Į‘ī-“∂∆¨°Ī÷ģľš’Ů∂ĮŮÓļŌĶńĹŠĻŻ°£ŃĹľ§’Ůīł”Ž“∂∆¨ĻŐ”–∆Ķ¬ ŌŗÕ¨ Ī∑Ę…ķĻ≤’ŮŌ÷Ōů£¨“∂∆¨∑ý÷Ķ—łňŔ…Ō…żĶĹ◊Óīů£¨»ŰŃĹ’Ŗ∆Ķ¬ Ōŗ≤ÓĹŌīů£¨∆ęņŽĻ≤’Ů ĪĶń◊™ňŔ‘ľő™180 r/min£¨“∂∆¨’Ů∑ý‘Ú≥ŲŌ÷ĹŌīůĶń≤®∂Į£¨»ÁÕľ5(b)ňý ĺ°£
Õľ5 ≤ĽÕ¨Ľō◊™ňŔ∂»«ż∂Į“∂∆¨’Ů∑ý«ķŌŖ
Fig. 5 Amplitude curves of driving blade with different rotating speeds
4 ‘—ť—–ĺŅ
Ĺę∑ÁĶÁ“∂∆¨ĻŐ∂®‘ŕ∆£ņÕľ”‘ōĽý◊ý…Ō£¨ņŻ”√÷ßľ‹ļÕ“∂∆¨ľ–ĹęŃĹľ”‘ō◊į÷√ĻŐ∂®‘ŕ“∂∆¨…Ō£¨ŃĹ∆£ņÕľ”‘ō◊į÷√∑÷ĪūĻŐ∂®‘ŕĺŗņŽ“∂∆¨łý≤Ņ65%ľį45%ī¶°£≥›¬÷≤‚ňŔīęł–∆ų Ķ Īľž≤‚∆ę–ńŅťĶńőĽ÷√–ŇļŇ£¨ňÕ»ŽŅō÷∆∆ų£¨Ņō÷∆∆ų Ķ Īľ∆ň„≥ŲŌŗőĽ≤ÓľįĶÁĽķňŔ∂»£¨…®√Ť≤∂◊Ĺ“∂∆¨ĶńĻ≤’ŮĶ„£¨ľ§Ļ‚≤‚ĺŗ“«ľŗ≤‚“∂∆¨ľ”‘ōĶ„ī¶őĽ“∆£¨“∂∆¨ŃĹīłľ§’Ůľ”‘ō◊į÷√»ÁÕľ6ňý ĺ°£
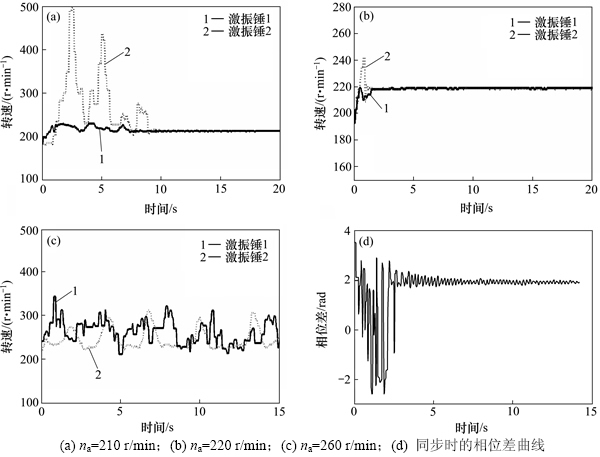
ŮÓļŌÕ¨≤Ĺīę∂Į ‘—ť Ī£¨ňęīłľ§’Ů◊į÷√÷–÷Ľ”–1Ő®∆Ű∂Į£¨ľŔ…ŤłńĪšľ§’Ůīł1Ķń◊™ňŔna (na=220 r/min Ī£¨’Ů∂Į∆Ķ¬ Ķ»”ŕĻ≤’Ů∆Ķ¬ 3.67 Hz)£¨≤‚ŃŅŃĹľ§’ŮīłĶń◊™ňŔľįŌŗőĽ≤Ó–ŇŌĘ£¨ ‘—ťĹŠĻŻ»ÁÕľ7ňý ĺ°£
ī” ‘—ťĹŠĻŻŅ…÷™£ļĶĪna=210 r/min Ī£¨ŮÓļŌ◊ų”√ľ§’Ůīł2◊™ňŔĺ≠ĻżĹŌīůĶń≤®∂ĮļůĹÝ»ŽÕ¨≤ĹŮÓļŌ◊īŐ¨£¨»ÁÕľ7(a)ňý ĺ£ĽĶĪna£ľ210 r/min Ī£¨ľ§’Ůīł2Ķń‘ň∂ĮĹŌő™őĘ»űļÕĽž¬“£¨≤Ľń‹ ĶŌ÷”Žľ§’Ůīł1Ķń◊™ňŔÕ¨≤Ĺ£ĽĶĪna£ĺ250 r/min Ī£¨ń‹ľ§∑Ęľ§’Ůīł2Ķń‘ň∂Į£¨ĶęŃĹľ§’Ůīł◊™ňŔĪšĽĮĹŌő…¬“£¨»ÁÕľ7(c)ňý ĺ£¨≤Ľń‹ ĶŌ÷Õ¨≤ĹŮÓļŌīę∂Į°£ĶĪ210£ľna£ľ250 r/min Ī£¨ń‹ĻĽ ĶŌ÷ŮÓļŌÕ¨≤Ĺīę∂Į£¨ĶĪna=220 r/min Ī£¨ĹŌ»›“◊ ĶŌ÷ŮÓļŌÕ¨≤Ĺīę∂Į£¨ŌŗőĽ≤Ó◊Óļůő»∂®‘ŕ łĹĹŁ–°≤®∂Į£¨»ÁÕľ7(d)ňý ĺ£¨ ĶŌ÷ŃňÕ¨≤ĹŮÓļŌīę∂Į°£‘ŕĻ≤’ŮĶ„ĹŌ»›“◊¬ķ◊„Õ¨≤Ĺ–‘ŐűľĢ£¨ĶÕ”ŕĻ≤’ŮĶ„≤Ľń‹ ĶŌ÷Õ¨≤Ĺīę∂ĮĶń‘≠“Ú «’Ů∑ýľį’Ů∂Įľ”ňŔ∂»ĹŌ–°£¨≤Ľ◊„“‘ő¨≥÷ŌĶÕ≥ĶńÕ¨≤Ĺ‘ň◊™°£
łĹĹŁ–°≤®∂Į£¨»ÁÕľ7(d)ňý ĺ£¨ ĶŌ÷ŃňÕ¨≤ĹŮÓļŌīę∂Į°£‘ŕĻ≤’ŮĶ„ĹŌ»›“◊¬ķ◊„Õ¨≤Ĺ–‘ŐűľĢ£¨ĶÕ”ŕĻ≤’ŮĶ„≤Ľń‹ ĶŌ÷Õ¨≤Ĺīę∂ĮĶń‘≠“Ú «’Ů∑ýľį’Ů∂Įľ”ňŔ∂»ĹŌ–°£¨≤Ľ◊„“‘ő¨≥÷ŌĶÕ≥ĶńÕ¨≤Ĺ‘ň◊™°£

Õľ6 ň꾧’Ůľ”‘ō ‘—ť◊į÷√
Fig. 6 Exciting point loading test device
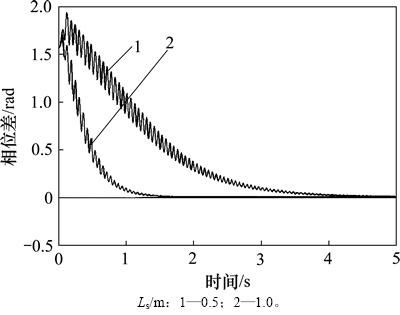
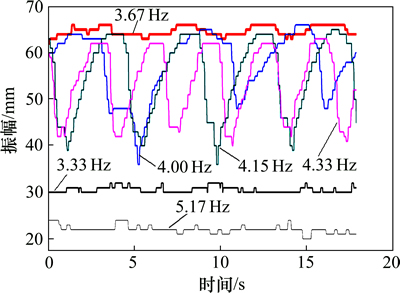
∂‘”ŕľ”‘ōŌĶÕ≥ľ§’ŮĶń“∂∆¨ő™∑«ŌŖ–‘∂‘Ōů£¨Ļ≤’ŮĶ„∆ęņŽŌĶÕ≥ĻŐ”–∆Ķ¬ £¨Ņ…ń‹ĽŠ≥ŲŌ÷’Ů∑ýŐÝ‘ĺĶ»Ō÷ŌůĶń∂ĮŐ¨∑÷≤Ū£¨ĶÁĽķĶń◊™ňŔ∑Ę…ķÕĽĪš£¨ŌŗőĽ≤ÓľĪĺÁĪšĽĮ£¨ĹÝ∂Ý”įŌžŌĶÕ≥Ķń’Ů∂Į◊īŐ¨°£Õ®Ļż ‘—ť—ť÷§∑÷≤ŪŮÓļŌŌ÷ŌůĶńīś‘ŕ£¨ ‘—ť ĪłńĪšĶÁĽķĶń◊™ňŔ(ľ§’Ůīł∆Ķ¬ )£¨Õ®Ļż≤‚ ‘“∂∆¨’Ů∑ýĪšĽĮīÔĶĹ—ť÷§∂ĮŐ¨∑÷≤ŪŮÓļŌĶńńŅĶń°£Õľ8ňý ĺő™ ‘—ť≤‚ ‘Ķ√≥ŲĶńłųľ§’Ů∆Ķ¬ Ō¬Ķń’Ů∑ý«ķŌŖ£¨∆Ķ¬ ĹŌĶÕ Ī’Ů∑ý«ķŌŖĹŌ∆Ĺő»£¨«“∑ý÷ĶĹŌ–°£ĽĶĪľ§’Ů∆Ķ¬ Ķ»”ŕŌĶÕ≥ĶńĻŐ”–∆Ķ¬ 3.67 Hz(◊™ňŔ220 r/min) ĪĺŖ”–◊ÓīůĶńő»∂®’Ů∑ý£¨∂Ýľ§’Ů∆Ķ¬ ≥¨ĻżĻ≤’Ů∆Ķ¬ īÔĶĹ4 Hz(◊™ňŔ240 r/min)łĹĹŁ Ī£¨’Ů∑ý≥ŲŌ÷ÕĽĪš£¨5 Hz Ī≤ĽĽŠ≥ŲŌ÷’Ů∑ýĶńÕĽĪš£¨≤Ę«“’Ů∑ýĹŌ–°°£ ‘—ťĹŠĻŻ”ŽņŪ¬ŘÕ∆Ķľő«ļŌ£¨÷§√ųŃňīś‘ŕ∂ĮŐ¨∑÷≤ŪŮÓļŌŌ÷Ōů°£
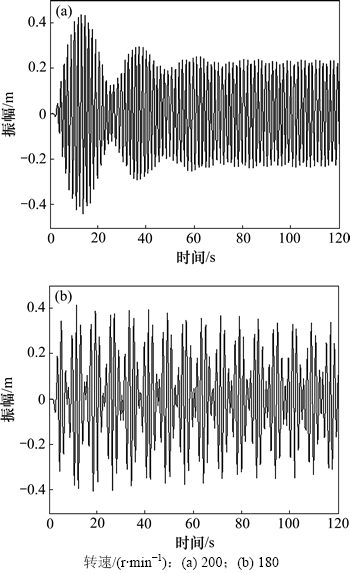
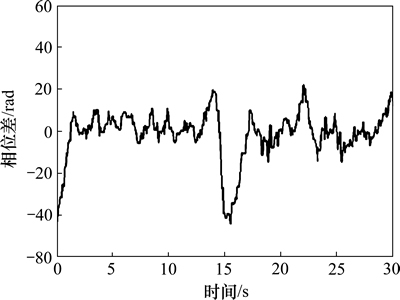
ŃĹīłľ§’Ů“∂∆¨ Ī£¨ĶĪ¬ķ◊„Õ¨≤Ĺ–‘ŐűľĢ[12]£¨ŃĹľ§’ŮīłĶń◊™ňŔ”ŽŌŗőĽ«ų”ŕÕ¨≤Ĺ£¨ŌŗőĽ≤ÓĽŠ◊‘∂Į«ų”ŕń≥łŲĻŐ∂®÷Ķ°£Ņō÷∆Õ¨≤Ĺ « ĶŌ÷īłŃ™∂Įľ§’Ůľ”‘ōĶń”––ß∑Ĺ Ĺ÷ģ“Ľ£¨Õľ9ňý ĺő™Ņō÷∆Õ¨≤ĹŌ¬ĶńŌŗőĽ≤Ó Ķ≤‚«ķŌŖ£¨ ‘—ť ĪÕ¨≤ĹŅō÷∆≤Ŗ¬‘”Žň„∑®≤…”√–ťń‚÷ųŃÓŅō÷∆∑Ĺ Ĺ[13]°£‘ŕŅō÷∆◊ų”√Ō¬ŌŗőĽ≤Óń‹ő¨≥÷‘ŕŃ„łĹĹŁ£¨ń‹ŌŻ≥ż◊‘Õ¨≤ĹīÝņīĶńĻŐ∂®ŌŗőĽ≤Ó£¨‘ŕ¬ķ◊„ĶÁĽķĻ¶¬ ĶńŐűľĢŌ¬∂‘ľ§’ŮŌĶÕ≥ĶńÕ¨≤ĹŅō÷∆ «Ņ…––Ķń°£
≤…”√Ņō÷∆Õ¨≤Ĺ∑Ĺ Ĺ£¨ŃĹľ§’Ůīł∆ę–ńŅťĽō◊™«ż∂ĮňŔ∂»ő™200 r/min(∆Ķ¬ 3.33 Hz)£¨ĶÕ”ŕ“∂∆¨ĶńĶÕĹ◊ĻŐ”–∆Ķ¬ £¨≤Ę«“∆ęņŽĻ≤’ŮĶń◊™ňŔĹŌ–°£¨‘ľő™20 r/min£¨“∂∆¨’Ů∑ý‘ŕĺ≠ņķĹŌīůĶń≤®∂Į÷ģļů£¨÷Ķ«ų”ŕ∆Ĺő»£¨īň Ī“∂∆¨Ķń’Ů∑ýĹŲő¨≥÷‘ŕ300mm◊ů”“£¨≥ŲŌ÷Ńň ż÷Ķ∑¬’ś÷–ĶńÕ¨≤ĹŌ÷Ōů£¨“∂∆¨’Ů∑ýĪšĽĮ«ķŌŖ»ÁÕľ10ňý ĺ°£“∂∆¨‘ŕ ‹∆»’Ů∂Į Ī£¨“∂∆¨’Ů∂Į∆Ķ¬ ≤Ę≤Ľ◊‹Ķ»”ྦྷ’Ů∆Ķ¬ £¨ĶĪľ§’Ů∆Ķ¬ īů”ŕń≥łŲ÷Ķ(Īĺīő∆Ķ¬ …®√Ť ‘—ť◊™ňŔ‘ľő™190 r/min) Ī£¨“∂∆¨’Ů∂Į∆Ķ¬ ĽýĪĺĶ»”ྦྷ’Ů∆Ķ¬ °£
Õľ7 ŮÓļŌÕ¨≤Ĺīę∂ĮĶń ‘—ťĹŠĻŻ
Fig. 7 Synchronous transmission experimental results
Õľ8 łų÷÷∆Ķ¬ Ō¬Ķń’Ů∑ý≤‚ŃŅ«ķŌŖ
Fig. 8 Amplitude measurement curves at various frequencies
Õľ9 Ņō÷∆Õ¨≤ĹĶńŌŗőĽ≤Ó«ķŌŖ
Fig. 9 Control synchronous phase difference curve

Õľ10 “∂∆¨’Ů∑ý«ķŌŖ(∆Ķ¬ ő™3.33 Hz)
Fig. 10 Wind turbine blade amplitude curve
5 ĹŠ¬Ř
1) ňęīłľ§’Ů∆£ņÕľ”‘ōŌĶÕ≥∑ý∆Ķ«ķŌŖ”ŽŌĶÕ≥ł’∂»ŌĶ żĪšĽĮ°ĘŃĹľ§’ŮīłĶńŌŗőĽ≤Ó”–ĻōŌĶ£¨Õ‚łļ‘ōŐō–‘”Ž∑ý∆ĶŐō–‘«ķŌŖŌŗĻō£¨ Ļ”√‘ň––Őō–‘“Ľ÷¬°Ę≤ő żŌŗÕ¨ĶńĶÁĽķ£¨ľ”īů∆ę–ńĺō°Ę’Ů∑ý°Ę◊™∂ĮĻŖŃŅ£¨ľű–°–ż◊™÷ŠĶń◊ŤńŠŌĶ ż“‘”–ņŻ”ŕŌĶÕ≥Ķńő»∂®–‘°£
2) ľ§’Ůīł÷ģľšŌŗőĽ≤ÓĶńĪšĽĮ”ŽĶÁĽķ◊™ňŔ°Ęį≤◊įĺŗņŽ“‘ľį“∂∆¨Ķń≤ő żĶ»“Úňō√‹«–ŌŗĻō£¨ľ§’Ů◊į÷√”Ž“∂∆¨÷ģľšīś‘ŕ◊ŇĹŌ«ŅĶńѶ”Žń‹ŃŅĶńīęĶ›£¨ľ§’Ů∆Ķ¬ ”Ž“∂∆¨ĻŐ”–∆Ķ¬ ∆ę≤ÓĹŌ–° Ī£¨ĻŐīśĶńĽķĶÁŮÓļŌŌ÷ŌůĽŠĶľ÷¬“∂∆¨’Ů∑ýő»∂®£¨»Ű∆ę≤Ó‘Ųīů£¨“∂∆¨’Ů∑ý‘Ú∑Ę…ķĺÁŃ“≤®∂Į°£
3) ‘ŕĻ≤’ŮĶ„łĹĹŁŅ…ń‹ĽŠ≥ŲŌ÷∂ĮŐ¨∑÷≤ŪŮÓļŌŌ÷Ōů£¨≤ĽÕ¨”ྦྷ’ŮīłĶń∆Ķ¬ ŐÝĪšŌ÷Ōů£¨∑÷≤ŪŮÓļŌ «”…”ŕ“∂∆¨Ķń∑«ŌŖ–‘’Ů∂ĮŐō–‘‘ž≥…Ķń£¨Õ®ĻżĻ§◊ų∆Ķ¬ Ī‹Ņ™∑÷≤ŪĶ„ĽÚŅō÷∆Ķń∑Ĺ ĹŅ…Ī‹√‚◊™ňŔ≤®∂ĮĶĹ∑÷≤Ū«Ý°£
4) ŃĹľ§’Ůīł÷ģľšÕ®ĻżÕ¨≤Ĺ–‘◊™ĺōĹęń‹ŃŅīęĶ›£¨◊™ňŔĪšĽĮ Ļ÷ģīÔĶĹ∆Ĺļ‚ő»∂®◊īŐ¨£¨ŌŗőĽ≤Ó«ų”ŕŃ„ĽÚĻŐ∂®÷Ķ£¨≤Ę”ŽŌĶÕ≥ĶńĻŐ”–∆Ķ¬ °Ę∑«ŌŖ–‘≥Ő∂»°ĘĶÁĽķ≤ő ż°ĘĶÁīŇ◊™ĺō≤ÓŌŗĻō°£‘ŕ¬ķ◊„ĶÁĽķĻ¶¬ ĶńŐűľĢŌ¬∂‘ňęīłľ§’ŮŌĶÕ≥Ņō÷∆Ņ…»°Ķ√ĹŌļ√ĶńÕ¨≤Ĺ–ßĻŻ°£
≤őŅľőńŌ◊£ļ
[1] JENSEN F M, FALZON B G, ANKERSEN J, et al. Structural testing and numerical simulation of a 34 m composite wind Tuthine blade[J]. Composite Structures, 2006, 76: 52-61.
[2] ņÓĶ¬‘ī, “∂÷¶»ę, ≥¬—Ō, Ķ». ∑ÁѶĽķ“∂∆¨‘ōļ…∆◊ľį∆£ņÕ Ŕ√Ł∑÷őŲ[J]. Ļ§≥ŐѶ—ß, 2004, 21(6): 118-123.
LI Deyuan, YE Zhiquan, CHEN Yan, et al. Load spectrum and fatigue analysis of the blade of horizontal axis wind turbine[J]. Engineer Mechanics, 2004, 21(6): 118-123.
[3] SHAMSAEI N, GLADSKYI M, PANASOVSKYI K, et al. Multiaxial fatigue of titanium including step loading and load path alteration and sequence effects[J]. International Journal of Fatigue, 2010, 32(11): 1862-1874.
[4] ĮŅ…÷ō, ’‘ŌĢ¬∑, –žĹ®÷–. īů–Õ∑ÁĶÁĽķ◊ť“∂∆¨∆£ņÕ ‘—ť—–ĺŅ[J]. Őę—Űń‹—ßĪ®, 2011, 32(8): 1264-1267.
SHI Kezhong, ZHAO Xiaolu, XU Jianzhong. Research on fatigue test of large horizontal axis wind turbine blade[J]. Acta Energiae Solaris Sinica, 2011, 32(8): 1264-1267.
[5] ’Ňņŕį≤, Ľ∆—©√∑. ∑ÁĶÁ“∂∆¨Ķ•Ķ„∆£ņÕľ”‘ōĻż≥Ő ż÷Ķ∑¬’ś”Ž ‘—ť[J]. ’Ů∂Į°Ę≤‚ ‘”Ž’Ô∂Ō, 2014, 34(4): 732-736.
ZHANG Leian, HUANG Xuemei. Simulation and test of wind power blades single point fatigue loading process[J]. Journal of Vibration, Measurement & Diagnosis, 2014, 34(4): 732-736.
[6] ŃűĻŕųŽ, ∂űľ”«Ņ, ’ŇĪÚ. ’◊ÕŖľ∂∑ÁĶÁĽķ◊ť∑ÁѶĹį“∂∂ŗ—ßŅ∆…Ťľ∆”ŇĽĮ[J]. ÷–ńŌīů—ß—ßĪ®(◊‘»ĽŅ∆—ßįś), 2013, 44(1): 140-148.
LIU Guanlin, E Jiaqiang, ZHANG Bin. Multi disciplinary optimization design on blades of MW wind turbine[J]. Journal of Central South University (Science and Technology), 2013, 44(1): 140-148.
[7] HAUPFEAR W M. The development of an adaptive control system for a phase locked excitation method for advanced wind turbine blade fatigue testing[D]. Daytona Beach: Embry Riddle Aeronautical University, 2010: 21-23.
[8] Õű∑ś, řŮĻķ, —’Őž””. Ľý”ŕMatlab Ķń“ž≤ĹĶÁ∂ĮĽķĹ®ń£∑Ĺ∑®Ķń—–ĺŅ[J]. ŌĶÕ≥∑¬’ś—ßĪ®, 2006, 18(7): 1733-1741.
WANG Feng, JIANG Jianguo, YAN Tianyou. Methods of asynchronous motor model simulation based on Matlab[J]. Journal of System Simulation, 2006, 18(7): 1733-1741.
[9] ņÓ–°ļŇ, ŃűĹ‹, ŃűĺĘŐő. Ķ•÷ ŐŚ∑«ŌŖ–‘ŌĶÕ≥–≥≤®»ŮĻ≤’ŮĶń–≥’ŮÕ¨≤Ĺ∑÷őŲ[J]. Ľķ–ĶĻ§≥Ő—ßĪ®, 2010, 46(1): 86-91.
LI Xiaohao, LIU Jie, LIU Jintao. Analysis of harmonic oscillation synchronization for the single-mass nonlinear system under harmonic wave sharp resonance condition[J]. Journal of Mechanical Engineering, 2010, 46(1): 86-91.
[10] ZHAO Cunyu, ZHANG Yimin, WEN Bangchun, et al. Synchronisation and general dynamic symmetry of a vibrating system with two exciters rotating in opposite directions[J]. Chinese Physics B, 2010, 19(3): 030301-7.
[11] Ķ•Ļ‚ņ§, Ļō–¬, ňő ņ∂ę. 100 kW∑ÁѶ∑ĘĶÁĽķ“∂∆¨∆£ņÕ∑÷őŲ[J]. Ņ…‘Ŕ…ķń‹‘ī, 2010, 28(2): 21-26.
SHAN Guangkun, GUAN Xin, SONG Shidong. Fatigue analysis on blade of 100kW wind turbine[J]. Renewable Energy Resources, 2010, 28(2): 21-26.
[12] ¬řīļņ◊, ļę«ŚŅ≠. “ļ—Ļ«ż∂ĮŅō÷∆Ķń∆ę–ńĽō◊™ŌĶÕ≥Õ¨≤ĹŐō–‘[J]. Ľķ–ĶĻ§≥Ő—ßĪ®, 2010, 46(6): 176-182.
LUO Chunlei, HAN Qingkai. Synchronization characteristics research of eccentric gyration system controlled by hydraulic driving[J]. Journal of Mechanical Engineering, 2010, 46(6): 176-182.
[13] ņīŲő, őŕĹ®÷–, ÷‹őń, Ķ». ◊ģīłÕ¨≤Ĺ’Ů∂ĮŌĶÕ≥ĶńĽķĶÁŮÓļŌŐō–‘ľįÕ¨≤ĹŅō÷∆[J]. Õ¨ľ√īů—ß—ßĪ®(◊‘»ĽŅ∆—ßįś), 2012, 40(6): 920-925.
LAI Xin, WU Jianzhong, ZHOU Wen, et al. Synchronization control and electromechanical coupling characteristics of pile hammer synchronous vibration system[J]. Journal of Tongji University (Natural Science), 2012, 40(6): 920-925.
(Īŗľ≠ —Ó”◊∆Ĺ)
’łŚ»’∆ŕ£ļ2015-11-10£Ľ–řĽō»’∆ŕ£ļ2016-02-25
ĽýĹūŌÓńŅ(Foundation item)£ļĻķľ“◊‘»ĽŅ∆—߼ýĹū◊ ÷ķŌÓńŅ(51505290) (Project(51505290) supported by the National Natural Science Foundation of China)
Õ®–Ň◊ų’Ŗ£ļőŕĹ®÷–£¨≤© Ņ£¨ĹŐ ŕ£¨ī” ¬ĽķĶÁ“ļŅō÷∆—–ĺŅ£ĽE-mail: tjjd328 @163.com

