��֧���ջ��Ľṹ����ƽ�沢����������ѧ����
��Դ�ڿ������ϴ�ѧѧ��(��Ȼ��ѧ��)2020���10��
�������ߣ������� ����� ��ʢ �����
����ҳ�룺2758 - 2772
�ؼ��ʣ�ƽ�沢���������ṹ���ࣻ����ѧ���鹦ԭ��
Key words��planar parallel mechanism; kinematic redundancy; statics; principle of virtual work
ժ Ҫ�����һ���ʵ�ֹ���ץȡ�������ƽ��ṹ���ಢ���������о���ѧ���������ȣ��������������ԭ�����û����Ľṹ��ɣ����������˶�ѧ����ģ�͡���Σ������ַ����������ſ˱ȼ��ջ�֧���ſ˱Ⱦ��������鹦ԭ�����ֱ������ṹ����֧��λ���·�����״̬ʱ�ľ���ѧ����ģ�ͼ�������ƽ̨λ���µıջ�֧������ѧ����ģ�ͣ��ɴ������������ѧ���۽�ģ���ٴΣ����б�켣�������غɵľ���ѧ���������Ա����飻���ƽ��ṹ���ಢ��������ͬ�����ߴ��ƽ��3-RRR�����������б�켣�������غɵľ���ѧ����Ա�ʵ�顣�о��������������ģ�����ý������ڷ��������������Ϊ0.774%����֤�˾���ѧ����ģ�͵���ȷ�ԣ�������������3-RRR������Ӧ������������������½��������ṹ������������Ч���ƻ������������ԣ�������������ѧ���ܡ�
Abstract: Statics analysis was carried out on a planar parallel mechanism with kinematic redundancy, which could be used to realize pick and place task. Firstly, the design idea of the mechanism was introduced. The structure of the mechanism was analyzed and its inverse kinematic model was established. Secondly, the Jacobian matrix of the whole mechanism and the Jacobian matrix of the closed-loop branch chain were established based on the differential method. The theoretical static model for the nonredundant state was established when the position of a redundant branch chain was given, and the theoretical static model of the closed-loop branch chain was established when the position and orientation of the moving platform were given. Thus, the static theoretical modeling of the whole machine was completed by using principle of virtual work. Thirdly, the comparison of theory results and simulation results study between variable trajectory and variable external load tasks were performed. Finally, the comparison study of statics simulation experiments of planar parallel mechanism with kinematic redundancy and planar 3-RRR parallel mechanism with the same characteristic size under variable trajectory and variable external load were carried out. The results show that the maximum relative error between results of the theoretical model results and the simulation results is 0.774%, which can be used to verify the correctness of the statics theory model. The design of redundant structure is beneficial to improve the mechanism force transfer characteristics and the static performance of the mechanism.
DOI�� 10.11817/j.issn.1672-7207.2020.10.008

������������죬��ʢ�������
(������ͨ��ѧ ��е����ӿ��ƹ���ѧԺ��������100044)
ժҪ�����һ���ʵ�ֹ���ץȡ�������ƽ��ṹ���ಢ���������о���ѧ���������ȣ��������������ԭ�����û����Ľṹ��ɣ����������˶�ѧ����ģ�͡���Σ������ַ����������ſ˱ȼ��ջ�֧���ſ˱Ⱦ��������鹦ԭ�����ֱ������ṹ����֧��λ���·�����״̬ʱ�ľ���ѧ����ģ�ͼ�������ƽ̨λ���µıջ�֧������ѧ����ģ�ͣ��ɴ������������ѧ���۽�ģ���ٴΣ����б�켣�������غɵľ���ѧ���������Ա����飻���ƽ��ṹ���ಢ��������ͬ�����ߴ��ƽ��3-RRR�����������б�켣�������غɵľ���ѧ����Ա�ʵ�顣�о��������������ģ�����ý������ڷ��������������Ϊ0.774%����֤�˾���ѧ����ģ�͵���ȷ�ԣ�������������3-RRR������Ӧ������������������½��������ṹ������������Ч���ƻ������������ԣ�������������ѧ���ܡ�
�ؼ��ʣ�ƽ�沢���������ṹ���ࣻ����ѧ���鹦ԭ��
��ͼ����ţ�TH112 ���ױ�־�룺A ���ſ�ѧ(��Դ����)��ʶ��(OSID)
���±�ţ�1672-7207��2020��10-2758-14
QU��Haibo, HU��Lanqing, GUO��Sheng, LI��Shujie
(School of Mechanical, Electronic and Control Engineering, Beijing Jiaotong University, Beijing 100044, China)
Abstract: Statics analysis was carried out on a planar parallel mechanism with kinematic redundancy, which could be used to realize pick and place task. Firstly, the design idea of the mechanism was introduced. The structure of the mechanism was analyzed and its inverse kinematic model was established. Secondly, the Jacobian matrix of the whole mechanism and the Jacobian matrix of the closed-loop branch chain were established based on the differential method. The theoretical static model for the nonredundant state was established when the position of a redundant branch chain was given, and the theoretical static model of the closed-loop branch chain was established when the position and orientation of the moving platform were given. Thus, the static theoretical modeling of the whole machine was completed by using principle of virtual work. Thirdly, the comparison of theory results and simulation results study between variable trajectory and variable external load tasks were performed. Finally, the comparison study of statics simulation experiments of planar parallel mechanism with kinematic redundancy and planar 3-RRR parallel mechanism with the same characteristic size under variable trajectory and variable external load were carried out. The results show that the maximum relative error between results of the theoretical model results and the simulation results is 0.774%, which can be used to verify the correctness of the statics theory model. The design of redundant structure is beneficial to improve the mechanism force transfer characteristics and the static performance of the mechanism.
Key words: planar parallel mechanism; kinematic redundancy; statics; principle of virtual work
ƽ�������ɶȲ��������ڹ�ҵ���ӹ�[1]��ץȡ����[2]��ƽ���ͼ��3C��Ʒ��װ���������DZ��Ӧ�ü�ֵ������ڿռ䲢����������ṹ���ڶ�ѧ�߶�ƽ�沢�������ĸ��������繤���ռ�[3]���˶�����[4]��·���滮[5]�����ȷ���[6]���˶�����[7]�����ܷ���[8]������������[9]��α�������[10]�Ƚ������о���Ϊƽ�沢��������Ӧ�õ춨�˻�����Ϊ�˸��õ��������������Ĺ������ܣ��ڶ�ѧ�߿��ǽ�����������벢�����������С����������������������ͽṹ�����[11]���������ಢ��������������Ŀ���ڻ��������ɶ���Ŀ�����ṹ���ಢ�����������ɶ���Ŀ���ڻ�����������Ŀ�������ڶ�ƽ̨��������ɶȡ��ṹ���ಢ���������Լ��������ŵ㲢�˷�������������ľ��˶�Э�����⣬���������������Ϸ���������˵��ݴ��������ܵ��˹㷺��ע��GOSSELIN��[12]���һ��ƽ�沢���������о���ͨ����������ṹ���л����������ܷ�������ָ���ṹ���ಢ�������Dz��������¹����о��ij�����[12]��KANG��[13]�����е�ƽ��3-RRR��������������������������ֿ�����������ṹ����ڶ������졣�ṹ������˿�����չ���������ռ䡢���������⣬����������������ѧ���ܡ���������ѧ�����ǽ����˶�����������ѧ�����Ļ��������ȷ�ľ���ѧģ���������˽�����������غ�ʱ�����ؽڵ�������/���أ�Ϊ����ʵ�ﻯ�ṹ�ߴ��ȷ�����Ż����������ѡ���ṩ�����ݡ��ڶ�ѧ�����ò�ͬ�������˷�[14]���˼�ʸ����[15]����������[16]����λ��ԭ��[17]�ȶԲ��������ľ���ѧ�������о��������鹦ԭ��Ӧ�ýϹ㷺[18-24]����ƽ�沢�������ľ���ѧ�о����棬MOOSAVIAN��[25]���һ�ָĽ���̬���Եı伸����ܻ����˵����Ʒ���������Ӧ����Ƿ����VGTMģ����ƣ���������һ�����Ϳ��ع����������˵�ģ�黯��Ʒ����������˻�������ѧ���Ժͻ����Ŀɿ��Բ��������侲��ѧ���ܣ���Ӧ���ڻ���������������ܸĽ�[26]��WEN��[27]��������ɶ�ƽ�沢�������������ƣ������һ�ָն��ۺϲ��ԣ����������������ѧ���ܡ�KOCK��[28]��һ��ƽ��2���ɶ��������ಢ�����������˷����������������������������������ܼ��նȡ�LIAN��[29-33]��������Ԫ���������۶Բ��������ľ���ѧ���նȵ�����������о����������ָ��������������ȼ����ͱ��ε��Ż���Ʒ�����ͨ������Ԫģ������ʵ��Աȷ��������������֤�������˲�����������ѧ����������ѧ���ǻ��Խṹ�����ƽ�沢����������ѧ���ܵĸ��ƽ������о����磺BOUDREAU��[34]�����һ��ṹ����ƽ�沢���������������봫ͳ������3-RRRƽ�沢���������жԱȣ����ֽṹ������������˻������������ܣ�����˻���ѭ��������WEIHMANN��[35]�����һ�������ṹ����ƽ�沢���������������ķ��������ڸ�������ֵ�Ա�ʵ���У�֤ʵ�ṹ����ƽ������Ķ�ƽ̨���ܳ��ܵ��������ȷ�������������25%��BI��[36]�����һ�ֿ��ع��Ľṹ����ƽ�沢��������ͨ���ṹ�������ʵ���˶�PKM�Ĺ����ռ������նȷֲ��ĵ�������ǿ�˻����������������Ӧ�ԣ����⣬�������4�ֵ����������Ա�֤���������ڸ߸նȺ߸������Ӷ��Ľ�������������ѧ���ܡ��������߶�һ�����֧���ջ���ƽ��3-DOF�ṹ���ಢ������[37] (parallel mechanism with kinematic redundancy, PM-KR)�������˶�ѧ������ѧ�������û����ڱ�����ͳ���������ŵ��ǰ���£��ɽ����ṹ����֧���ĵ���ʵ�ֻ��������ռ����չ��Ϊ������������ṩ���ܣ��������ڻ�������ѧ�������������ڱ�ƽ��ṹ���ಢ���������бջ����������ԣ����о���ѧ����ʱ�����ò�˷������»�����ϵ����ȷ��������ʸ����ʱ���������м�����������������۷�����Ҫ���ж��֧����Ч�˶��任��Ϊ�о������������غ�ʱ�����ؽڵ�������/���أ�������Ա����ؽ��������м����Ӱ�죬���þ��бջ��������������������鹦ԭ���������û����ľ���ѧģ�͡��������ȶԸû�������ɼ��˶�ѧ������з����������鹦ԭ�����ſ˱Ⱦ����ƽ̨���ܱ��غɻ��λ������ʱ�������ؽھ���ѧģ�͡���Σ�Ϊ��֤ģ����ȷ�ԣ��Ի�����ƽ̨λ�ù̶��ܱ��غɺ�λ�ñ䶯�ܺ㶨�غɽ�������-����Ա����顣���������������ͬ�����ߴ��µ�3-RRRƽ�沢����������ͬԼ�������µĶԱ�ʵ�飬ͨ��������֤ʵ����ṹ���������ڲ�����������ѧ����������
1 �˶�ѧ����
1.1��PM-KR������������ṹ���
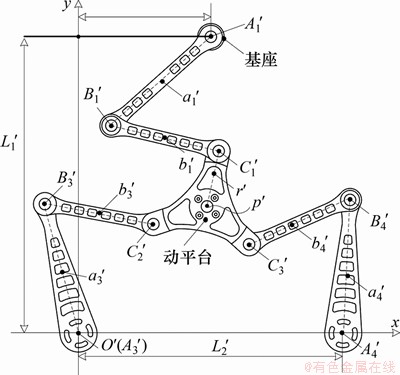
��ͳ3-RRRƽ�沢�������ڻ����ṹ�ߴ�ȷ�������ռ估�����콫��֮ȷ�������滮��·����������ڱ������ڹ����ռ䲻ͬ����ĩ��ִ�����������������Ϊ��������⣬ͨ����2�ָĽ�������1) ��������ĸ˼��������罫3-RRR���������Ķ�ƽ̨��Ϊ1������Ϊ��ת���ĸ˼�[38]����ʱ����3-RRR��������λ�˾��н�����[39]���ҿ�ͨ��2�������֧��ʵ�������칤���ռ�����[40]��2) ��3-RRR�������нṹ����������罫����1��RRR֧����1��PRRRRP�ջ�֧��ȡ������ʱ�������ɶȱ�Ϊ4�����ڶ�ƽ̨��������ɶ�(RDOF)[37] 3�����ṹ�����Ƶ�3-RRR����������Ϊƽ��ṹ���ಢ�����������������ɶȴ�����ɲ����������������С���ɶȣ���ˣ����Զ�����������ɶȽ��͵Ĺ�����ؽ��������ϵ�[41]�����ݴ���PM-KRʵ��������PM-KR CADģ�ͷֱ���ͼ1��ͼ2��ʾ��������ͨ��2����ת�����ֱ��ģ������(��Ҫ��ֱ��̨�Ͷ�Ӧ�IJ���������)��Э����϶���ʵ�ֶ�ƽ̨��x-yƽ�����ƶ���ת����
ͼ2�и��������z�᷽��ֲ㰲���Ա�����˼�����棬Ϊ�������ܼ��ṹ����֧���ĵ����ṩ�˿ռ䡣
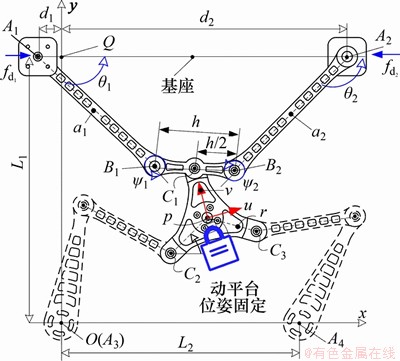
PM-KR���������ֲ������ŵĹ涨��ͼ3��ʾ�������ֽṹ�������1��ʾ��������ϵ(O-xyz)����������ڵ�O���涨z�ᴹֱֽ�����ϣ�x�ᴩ����A3��A4��y��ͨ�����ַ���ȷ����������ϵ(p-uvw)�붯ƽ̨�����ڶ�ƽ̨�������ĵ�p��w�ᴹֱֽ�����ϣ�u��ƽ���ڶ�ƽ̨��C2C3��v��ͨ�����ַ���ȷ����
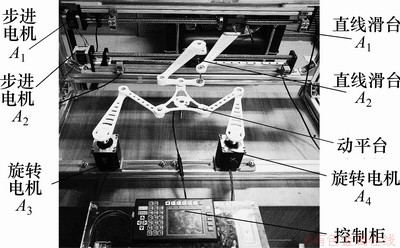
ͼ1��PM-KRʵ������
Fig. 1��Physical prototype of PM-KR
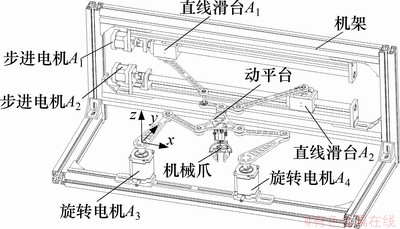
ͼ2��PM-KR CADģ��
Fig. 2��CAD model of PM-KR
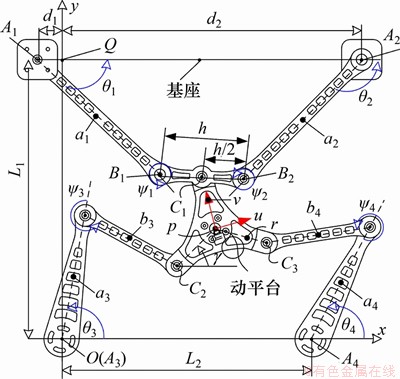
ͼ3��PM-KR��������ͼ
Fig. 3��Diagram of parameter symbols of PM-KR
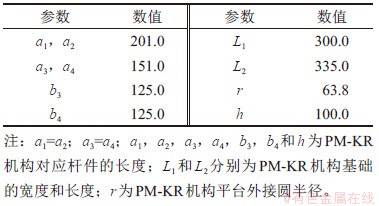
��1��PM-KR�ṹ����
Table 1��The structural parameters of PM-KR mm
�û����ɶ�ƽ̨��������2������֧��(֧��3(A3B3C2)��֧��4(A4B4C3))��1���ջ�֧��(QA1B1B2A2Q)��ɣ����бջ�֧������2������֧��(֧��1(A1B1C1)��֧��2(A2B2C1))��ɡ�2������֧��һ�˷ֱ����������ζ�ƽ̨����C2��C3��������һ�˷ֱ���̶��ڻ�������ת����������A3��A4���ջ�֧���붯ƽ̨�����ڵ�C1����C1�Ǹ�B1B2�����ģ���B1B2���˵�ֱ�ͨ����A1B1��A2B2���ƶ�����A1��A2�����ӣ��ɴ˸��ݸû����ṹ����ص㣬���û�������Ϊ2-RRR-(P4RP)����������Ϊͳһ���������ォPM-KR��ָ�����о���ƽ��������ಢ��������
1.2��PM-KR���˶��������
��������ƽ̨λ�ú���̬����xp��yp��





ͨ������任��ʽ(2)�����Եõ���ƽ̨3������


ʽ�У�
���ʽ(2)�ɵö�ƽ̨3������
�������ʸ����·���������ν���2��������1���ջ�֧���붯ƽ̨����������֮��Ĺ�ϵʽ��

��ʽ(4)����֪�Ķ�ƽ̨����

ʽ�У�



��ʽ(5)��֪������ƽ̨λ�ø�����




��ˣ�����
Ϊ��ȷ���˶�ѧ����Ľ�������ʽ������˶�λ��(����ij�ֳ�ʼ��װλ��)֮��Ķ�Ӧ��ϵ����Ҫ��16�鷴�����ѡ������Solidworks�н�����ͼ2��ʾ�Ļ���ģ�ͣ�������õĶ�ƽ̨λ�˲������δ���16���˶�ѧ�����У���ʽ(5)��(6)������˶�ѧ������Solidworks����ģ���в����Ķ�Ӧ����������жԱȣ�����������ֵ��������ֵ����ͬ�Ҵ��벻ͬ�Ķ�ƽ̨λ�˲�����Ȼ��ȣ�����Դ�16�鷴����ѡ�������ͼ2��ʾ��ʼ��װλ���µ��˶�ѧ�������ʽ����ʱ��ʽ(5)��(6)�еġ�
2 PM-KR����ѧ����ģ�ʹ
����ѧ�������о�����������ѧ���ܷ�����Ϊ��Ҫ���鹦ԭ���ڲ��������ľ���ѧ�����н����Ƕ�ƽ̨��������غ�ʱ�����ؽڵ�������/���صı仯�������Ա����ؽڵ������������أ�������������ȸ��Ӽ�࣬�ɲ����Ը�ǿ����ˣ����IJ��ø÷������о���ѧģ�ʹ��
2.1����������ѧģ�ͽ���
Ϊ�����о����ӻ����ĸ����������ؽھ���Ħ���ұ����ؽڴ������鹦�����Һ���������ƽ�沢����������ѧģ�ʹ��Ӱ�졣
���Ƚ������ڶ�ƽ̨�ϵ�����غɼ�Ϊ






ʽ(7)�������붯ƽ̨��λ�ƹ�ϵΪ[42]

ʽ�У�



��ʽ(8)����ʽ(7)��Ϊ����������λ��

�ɴ˵õ���ƽ̨������������ؽڵ�������/���ؼ�ı����ϵʽ����ʽ(9)��֪����ƽ̨�������ؽڵ�������/���ؼ�������ݹ�ϵ�������λ����ϵ���С�
���ڱ��������ṹ����ջ�֧���������������d1�Ի�������ѧ���з���ʱ�������ڵ��ƶ��ؽڼ�ֱ��̨A1ʵ��Ҳ�����ھ���ѧ������Ϊ�ˣ����ȷ����������d1����ʱ�������ڷ�����״̬�µľ���ѧģ�ͣ��õ���ʱ�������������ؽڵ�������/���ء���Σ�����ṹ�������d1����ͬһ�ջ��ı���d2���ϣ������鹦ԭ���Զ������ڵıջ�֧�����ж��ξ���ѧ��ģ������2.2�ڵõ���ֱ��̨A2����������Ϊ��֪�����ڱջ�֧���нṹ����ֱ��̨A1��ֱ��̨A2����ѧ��ϵ������ֱ��̨A2���������룬���յõ�ȫ�������ؽڵ�������/���ء�������ǿ�����ǣ�ֱ��̨A1��A2����������ָ���������������߷������õ�������������������ֱ��ģ��IJ������A1��A2�ṩ��Ϊ�������㣬���½�ֱ��̨A1��A2��������ͳ��Ϊ�����ؽ�A1��A2��������������A1��A2����������ֱ��̨A1��ֱ��̨A2ͳ��Ϊ����A1������A2���������A3�벽�����A4����������ͳ��Ϊ�����ؽ�A3��A4���������ػ�����A3��A4���������أ��������A3�벽�����A4ͳ��Ϊ�����ؽ�A3��A4��
2.2��������������µľ���ѧģ�ͽ���
���ڷ����������d1��������·�����ƽ�沢�������ľ���ѧģ�ͣ����ṹ�������d1�����õ��Ļ����ſɱȾ���Ϊ����
ѡȡ��ƽ̨��������Ϊ







1) �������ڷ�ջ�·ʸ�����Ķ�ƽ̨���������ؽڼ����������

2) ������������ֱ��ʱ�����ֵõ��ſ˱Ⱦ�������Ԫ�ء�
��ʽ(11)��֧��3�����������Ը�дΪ

ʽ(12)��O-xyz����ϵ����x��y���ͶӰ�ֱ�Ϊ��




����ʽ(13)��(14)����ȥ�м����

ʽ�У�

��ʽ(15)����ͬʱ��ʱ�����֣��ɵ��ſ˱Ⱦ����1��Ԫ�ء�
ͬ��������ʽ(12)~(15)��֧��4��2���м��㣬�ɵ�ʽ(17)��(18)����ʽ(17)��(18)����ֱ��ʱ�����ֵ��ſɱȾ����2�͵�3��Ԫ�ء�
����֧��4���价·����Ϊ

����֧��4�Ļ�·����(16)��O-xyz����ϵ����x��y���ͶӰҲ�����м����


ʽ�У�



ͬ��������֧��2���价·���̼�����ʽΪ

����֧��2�Ļ�·����(19)��O-xyz����ϵ����x��y���ͶӰҲ�����м����
��ʽ(15)��(17)��(18)�ֱ��ʱ�����֣�����дΪ������ʽ����

ʽ�У�









2.3���ṹ���ಢ�������ľ���ѧģ��
��ʽ(10)�����Ƶ�������3�������ؽڵ�������/�����붯ƽ̨���غ�֮��ľ������ݹ�ϵ�����ṹ����֧��������A1Ҳ�����˻�������ѧ�������ɴ�Ҳ���Ƶ�����ƽ̨���غ���ṹ����֧������A1�ľ���ѧ��ϵ����ʽ��
��������ƽ̨���غ��Ҷ�ƽ̨λ��ȷ��ʱ�����Լ���������ؽ�A2�����������ṹ��������A1������A2ͬʱλ�ڱջ�֧���У���ͼ4��ʾ����ʱ����ƽ̨��Ϊ�����̶������ջ�֧���ڽṹ�������d1����ʱ�����ɶ�Ϊ0�������鹦ԭ���ĽǶȷ����侲��ѧ���ԣ��ջ�֧����A1���˶������ơ�
���ջ�֧���Ľṹ�������d1��С�仯���Ƽ���λ��



ͼ4���ջ�֧��������������������
Fig. 4��Diagram of closed loop chain parameters and statics analysis symbols
��ʽ(9)�õ������ṹ����֧��λ���µ�PM-KR����λ�ε������ؽڵ��������붯ƽ̨����ѧ���ݹ�ϵʽΪ

��ʱ��




1) ��Աջ�֧�����������ڷ�ջ�·ʸ�����Ķ�ƽ̨�������ؽڼ���������

2) ������������ֱ��ʱ�����֣��õ��ſ˱ȹ�ϵ����Ԫ�ء�
���ջ�֧������������дΪ���ʸ����·��ʽ��

ʽ(23)��O-xyz����ϵ����x���ͶӰ����ʽΪ


ʽ�У�













ͨ����1�ڷ�����֪
��ʽ(24)����ֱ��ʱ�����֣���дΪ�ٶ��ſɱȹ�ϵ��ʽ���ɱ�ʾΪ

ʽ�У�

���2.2��2.3�ڵķ�������������ƽ̨λ�˼�����غɸ���ʱ������ʽ(10)���ɵ�3�������������أ�
��ʽ(26)��õ�������
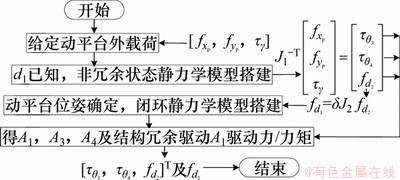
ͼ5��PM-KR����ѧ��������
Fig. 5��Flow chart of statics analysis of PM-KR
3 ����-������ֵ�Ա�ʵ��
Ϊ��֤��2������Ļ�������ѧ����ģ�͵���ȷ�ԣ��趨��2�������ľ�����ֵ����ʵ�飺1) ������ƽ̨��Բ�켣��Բ�ĽDZ仯���仯λ�ã�ִ�жԶ�ƽ̨ʩ�Ӻ㶨���غɵ�����2) ��ƽ̨ͣ����Բ�켣ijһԲ�ĽǶ�Ӧλ�ã�ִ���ڶ�ƽ̨��ʩ�ӱ����غɵ�����Ϊ�˼������ٶ���ƽ̨��̬��
3.1���㶨���غ��µľ�����ֵ����
�趨��ƽ̨Բ�켣����Ϊ

������ƽ̨���غ�Ϊ��


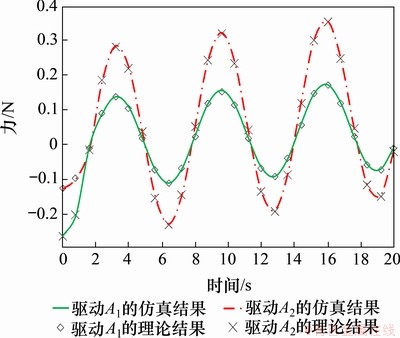
��ƽ̨Բ�켣��Բ�ĽDZ仯���仯���ɴ˵õ�Բ�켣��ͬλ���µ�3���������ṹ����֧�����������������������ء�ͬʱ����������ģ�������õ�ͬ�ߴ�Ļ���Solidworks ģ�͵���Adams�������о���ѧ���档����ģ�����ý����Adams�������ý����ͼ6��ͼ7��ͼ6��ͼ7�У�A1��A2�����۽����������ֱ�ָ����A1��A2�����������۽�����������A3��A4�����۽����������ֱ�ָ����A3��A4�������������۽�����������
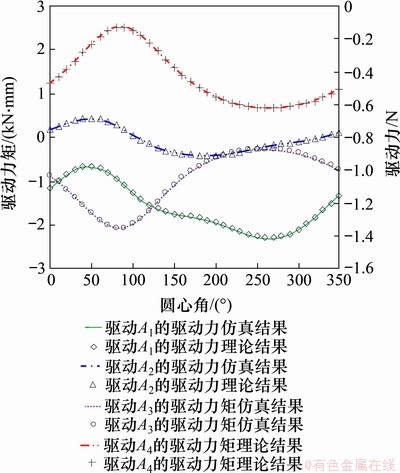
ͼ6���䶯ƽ̨λ�����غɺ㶨ʱ������/���ص����۽��-�������Ա�(d1=300 mm)
Fig. 6��Comparison of theoretical results and simulation results of driving force/torque when platform position is changed and load is constant (d1=300 mm)
��ͼ6��ͼ7���Կ�����3���������ṹ����֧��������������/�������۽����������仯����һ�¡�
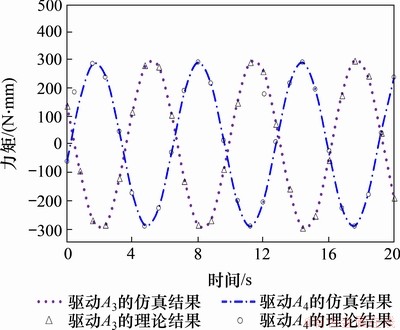
�Ա�ͼ6��ͼ7���Է��֣��ṹ���������d1=300 mm(I״̬)����Ϊd1=340 mm(II״̬)��ִ����ͬ����Ļ�������ѧ���ܷ����ı䣬����ѡȡ����ǰ���Ӧ��������ֵ���жԱȣ�����A3��A4�������������߱仯�������ƣ�����A3��������������������II״̬ʱ��ֵ��I״̬ʱ��ֵС����Բ�Ľ�Ϊ250��ʱ������A3���������ز�ֵ���Ϊ254.583 N��mm������A4�������������ߵ���������������ֵ��II״̬ʱ��I״̬С����Բ�Ľ�Ϊ240��ʱ������A4��������������ֵΪ263.853 N��mm��ͬʱ������A1��A2����������������ǰ���������A1������������II״̬ʱ��������ֵ��I״̬ʱ��С����Բ�Ľ�Ϊ230��ʱ������A1������������ֵΪ0.855 N������A2�����������ߵ�������ֵ��II״̬ʱ��I״̬����Բ�Ľ�Ϊ230��ʱ������A2����������ֵҲ���Ϊ0.829 N���ɴ˿ɼ����ṹ���������Բ��������ľ���ѧ�����е������á�
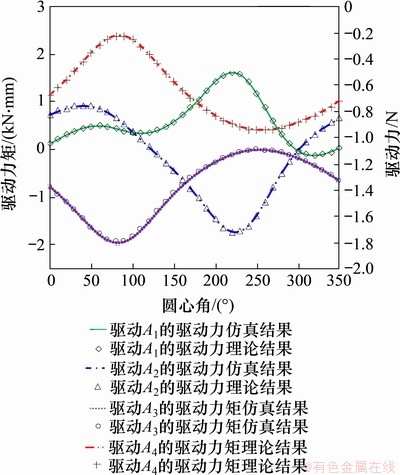
ͼ7���䶯ƽ̨λ�����غɺ㶨ʱ������/�������۽��-�������Ա�(d1=340 mm)
Fig. 7��Comparison of theoretical results and simulation results of driving force/torque when platform position is changed and load is constant (d1=340 mm)
Ϊ��һ��������������ģ�͵���ȷ�ԣ�ѡȡd1=300 mmʱ������ֵ�����ֵ��������жԱȣ���ͼ8��ͼ9��ʾ����ͼ8��ͼ9���Կ���������ģ�����������Ϊ0.774%����һ��˵���˸�����ģ�͵���ȷ�ԡ�
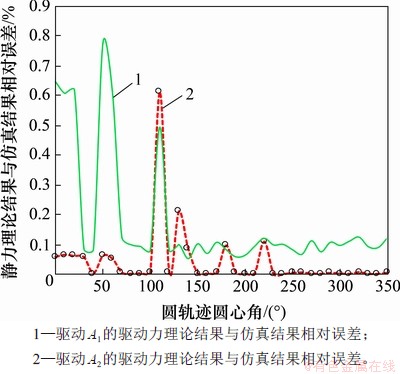
ͼ8���䶯ƽ̨λ�õ����������۽���������������
Fig. 8��Relative error of theoretical results and simulation results of driving force/torque when platform position is changed
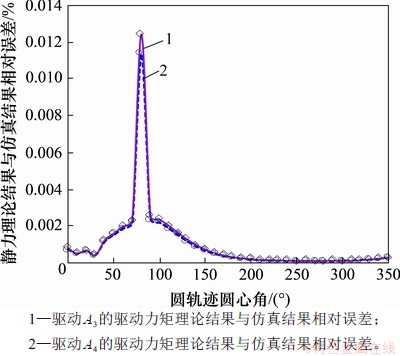
ͼ9���䶯ƽ̨λ�õ������������۽��-������������
Fig. 9��Relative error of theoretical results and simulation results of driving torque when platform position is changed
3.2�������غ��µľ�����ֵ����
��ʧһ���ԣ�ѡȡ��ƽ̨����Բ�Ľ�

ͬ����ѡȡ�ṹ�������d1=300 mm��d1=340 mm��2��״̬���з������õ�ִ����ʽ(28)��ʾ����ʱ�������ؽ�����������������/���أ���ͼ10��ͼ13��ʾ����ͼ10��ͼ13��֪������ֵ�仯���Ƽ���ֵ��2�����棬����ģ�ͼ���ֵ�������ֵ��ͬ����d1=300 mmʱ�����۽�����������������жԱȣ��õ�ͼ10������A1��A2������������Է���������Ϊ0.1356%��ͼ12������A3��A4������������Է���������Ϊ0.003%���ɴ�֤��������ģ���ڶ�ƽ̨�ܱ����غ�ʱҲ����ȷ��⡣
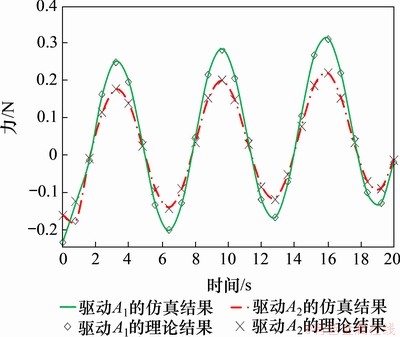
ͼ10������A2��������A1�����۽����������Ա�(d1=300 mm)
Fig. 10��Comparison of theoretical results and simulation results of driving A2 and driving A1 (d1=300 mm)
ͼ11������A2��������A1�����۽����������Ա�(d1=340 mm)
Fig. 11��Comparison of theoretical results and simulation results of driving A2 and driving A1 (d1=340 mm)
ͼ12������A3������A4�������۽����������Ա�(d1=300 mm)
Fig. 12��Comparison of theoretical results and simulation results of driving A3 and driving A4 (d1=300 mm)
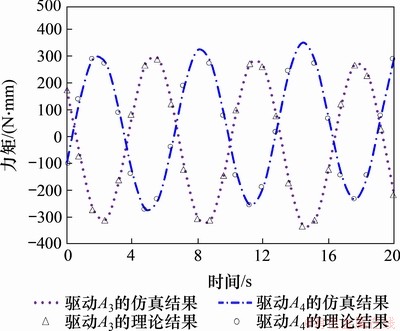
ͼ13������A3������A4�������۽����������Ա�(d1=340 mm)
Fig. 13��Comparison of theoretical results and simulation results of driving A3 and driving A4 (d1=340 mm)
��������ṹ�������d1�Բ�����������ѧ���ܵ�Ӱ�졣�Ա�ͼ10��ͼ11�ж�Ӧ���������仯���ƿ��Է��֣��ṹ���������d1=300 mm(I״̬)����Ϊd1=340 mm(II״̬)��ִ����ͬ����Ļ�������ѧ���ܷ����ı䡣����ѡȡ����ǰ���Ӧ��������ֵ���жԱȣ�����A1��A2����������������ǰ���������A1��������������II״̬ʱ��������ֵ����ֵ��I״̬ʱ��С����16 s������A1����������ֵ���Ϊ0.142 6 N������A2��������������II״̬ʱ��������ֵ����ֵ��I״̬ʱ�Ĵ���0 sʱ������A2����������ֵ���Ϊ0.529 33 N��
ͬʱ���Ա�ͼ12��ͼ13�е��������ؼ��仯���ƿ��Է��֣�����A3��A4�������������߱仯����ǰ����С����16 sʱ������A3���������ز�ֵ���Ϊ64.94 N��mm��ͬʱ������A4���������ز�ֵҲ���Ϊ90.287 N��mm���ɴ˿ɼ����ṹ���������Ա��غ�����²��������ľ���ѧ����Ҳ�е������á�
4 PM-KR��3-RRR����Ա�ʵ��
�ṹ�������Ʋ��������ڲ�������������죬��չ�����ռ䣬�����������侲��ѧ���ܵ�������
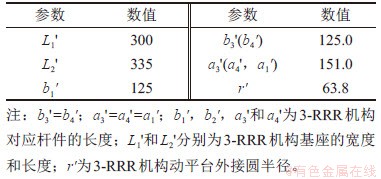
�����������Դ�ڶԴ�ͳƽ��3-RRR���������ĸĽ�����ˣ����Ľ���PM-KR��3-RRRƽ�沢�����ľ���ѧ���ܽ��жԱ��о���Ϊ�˼��о����˴�ѡȡ�������d1=300 mm��3-RRR�����Ľṹ�ߴ�ѡȡ��PM-KR��һ�£�ִ�е�����Ҳ��ͬ����ṹ������ͼ14��ʾ���й涨���ߴ����2��ʾ��
ͼ14��3-RRRƽ�沢�������������Ź涨
Fig. 14��Diagram of parameter symbols specification of 3-RRR planar parallel mechanism
��2��3-RRR�ṹ����
Table 2��Structural parameters of 3-RRR mm
3-RRR�ľ���ѧ����ģ���ѵõ��㷺�о�[42]��PM-KR������ģ�͵���ȷ���ѵõ�֤ʵ����ˣ�Ϊȷ��ϵͳ���ԶԱȽ��������Ӱ�죬���նԱ���������һ��ԭ��Solidworks�н�����2�����ģ�͵���ͬһ�����µ�Adams�����У�ִ������2������
4.1����ƽ̨���غɺ㶨��ִ����Բ�켣��λ������
�����ж�ƽִ̨�е�Բ�켣������ʽ(27)��ʾ�������ڶ�ƽ̨�ϵ����غ�Ϊ��


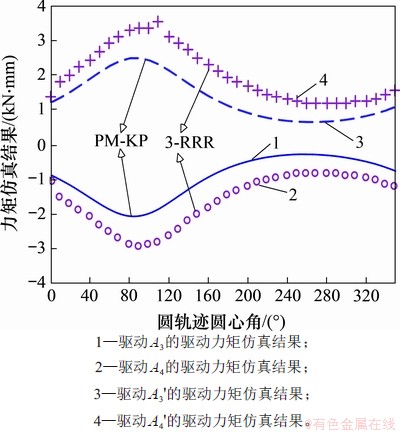
ͼ15���䶯ƽ̨λ�����غɺ㶨ʱ�������ط������Ա�
Fig. 15��Comparison of simulation results of driving torque when platform position is changed and load is constant
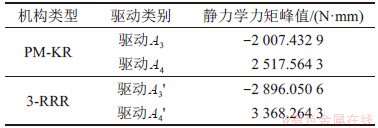
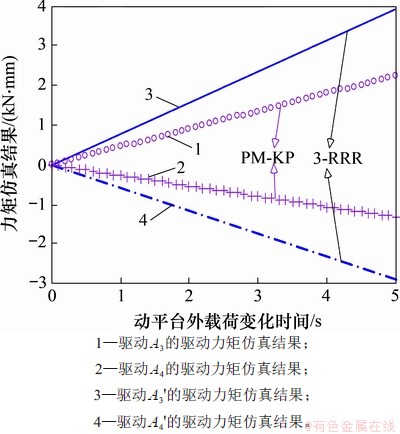
�ӱ�3��֪����ʩ���ڶ�ƽ̨�ϵ����غɺ㶨��ǰ���£���ƽ̨λ����Բ�켣�仯ʱ��PM-KR��A3�������������3-RRR��A3'�������ط�ֵ�½�28.5%��PM-KR��A4�������������3-RRR��A4'�������ط�ֵ�½�25.3%�����������������ڷ�Χ�ڣ�PM-KR��A3��A4�������طֱ�С��3-RRR��A3'��A4'�������ء�
��3��PM-KR��3-RRRƽ�沢�������������ط�ֵ�Աȱ�(���غɺ㶨�ı�켣����)
Table 3��Comparison table of driving moment peaks for PM-KR and 3-RRR planar parallel mechanism(variable trajectory task with constant external load)
����PM-KR�ıջ�֧������2��ֱ��̨A1��A2������֮��Ӧ��3-RRR��֧��1��



ʽ�У�



Ϊ���ڱȽϣ�������A1������A2����ʽ(29)����õ���Ť��


����
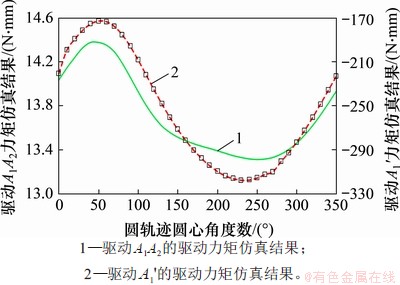
ͼ16���䶯ƽ̨λ�����غɺ㶨ʱ�������ط������Ա�
Fig. 16��Comparison of simulation results of driving torque when platform position is changed and load is constant
�Ա�ͼ15��16��֪��PM-KR������������������3-RRR���������������½���֤ʵ�ڶ�ƽ̨���غɺ㶨��ִ����Բ�켣��λ������ʱ���ṹ�������������Ч�Ľ����������ؽ��������ܣ��Ӷ�������������ѧ���ܡ�
4.2����ƽ̨λ�˹̶���ִ�����غɱ仯����
������ʩ�Ӹ���ƽ̨���غ���ʽ����С��ʽ(31)��ʾ����ƽ̨λ�˼����������趨��3.2���е���ͬ��
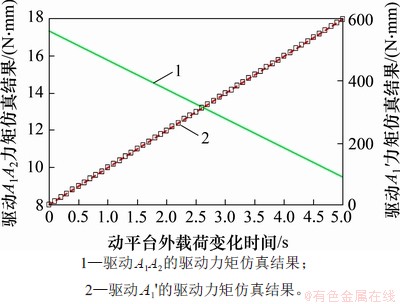
ִ�б����غ�����õ�PM-KR��3-RRRƽ�沢���������������ر仯ͼ����ͼ17��ʾ��2��ƽ�沢�������������صı仯���ƽ��Ƶ�����ֵ�ϴ��ڲ��죬���������صķ�ֵ�Ա����4��ʾ��
�ӱ�4���Կ�����������غɱ仯����ƽ̨λ�˹̶�ʱ��PM-KR��A3�������������3-RRR��A3'�������ط�ֵ�½�54.6%��PM-KR��A4�������������3-RRR��A4'�������ط�ֵ�½�42.7%��
ͼ17��λ�˹̶����غ�ʱ�������ط������Ա�
Fig. 17��Comparison of simulation results of driving torque when platform load is changed and position is constant
��4��PM-KR��3-RRRƽ�沢�������������ط�ֵ�Ա�(�����غɵĶ�λ������)
Table 4��Comparison of driving moment peaks for PM-KR and 3-RRR planar parallel mechanism(positioning fixed task of variable external load)

����4.1��������A1��A2���ܵ���
ͼ18��λ�˹̶����غ�ʱ�������ط������Ա�
Fig. 18��Comparison of simulation results of driving torque when platform load is changed and position is constant
�Ա�ͼ17��18��֪��PM-KR������������������3-RRR���������������½���֤ʵ�ڶ�ƽ̨λ�˹̶���ִ�����غɱ仯����ʱ���ṹ���������Ҳ����Ч�Ľ����������ؽ��������ܣ��Ӷ�������������ѧ���ܡ�
5 ����
1) �����˺�֧���ջ��Ľṹ���ಢ�������ľ���ѧģ�͡����ڱ�켣�ͱ����غ�2������µľ���ѧ���������Աȷ���������ֵ���仯����2��ά����֤�˾���ѧ����ģ�͵���ȷ�ԡ�
2) ͨ��ִ�б�켣�ͱ��غ�������֤�˽ṹ��������Ի�������/��������Ӱ�죬Ϊ�ṹ���ಢ����������ѧ���ԸĽ��춨�˻�����
3) ��ִ����ͬ��켣�ͱ����غ�����ʱ�����Ļ�����ȴ�ͳ������3-RRR���������������������������������������½����������ڸĽ��������������ԣ�������������ѧ���ܡ�
�ο����ף�
[1] BRIOT S, BONEV I A. Accuracy analysis of 3-DOF planar parallel robots[J]. Mechanism and Machine Theory, 2008, 43(4): 445-458.
[2] YI B J, NA H Y, LEE J H, et al. Design of a parallel-type gripper mechanism[J]. The International Journal of Robotics Research, 2002, 21(7): 661-676.
[3] DING B X, LI Y A, TANG Y R.Workspace analysis for a 3-DOF compliant parallel mechanism based on simmechanics[C]// Proceedings of the 2015 7th IEEE International Conference on Cybernetics and Intelligent Systems and Robotics, Automation and Mechatronics. Cambodia: IEEE, 2015: 48-53.
[4] RODELO M, VILLA J L, DUQUE J, et al. Kinematic analysis and performance of a planar 3RRR parallel robot with kinematic redundancy using screw theory[C]// 2018 IEEE 2nd Colombian Conference on Robotics and Automation. Barranquilla, Colombia: IEEE, 2018: 1-6.
[5] LIU Sheng, QIU Zhicheng, ZHANG Xianmin. Singularity and path-planning with the working mode conversion of a 3-DOF 3-RRR planar parallel manipulator[J]. Mechanism and Machine Theory, 2017, 107: 166-182.
[6] ZHANG Xuchong, ZHANG Xianmin. Accuracy analysis of a 3-DOF mechanism with joint clearances under different working modes[C]// Proceedings of ASIAN MMS 2016 & CCMMS.Guangzhou, China: Springer, 2016: 1199-1209.
[7] MAHINDRAKAR A D, BANAVAR R N, REYHANOGLU M. Controllability and point-to-point control of 3dof planar horizontal underactuated manipulators[J]. International Journal of Control, 2005, 78(1): 1-13.
[8] WU Jun, LI Tiemin, WANG Jinsong, et al. Performance analysis and comparison of planar 3-DOF parallel manipulators with one and two additional branches[J]. Journal of Intelligent and Robotic Systems, 2013, 72(1): 73-82.
[9] TIAN Y L, SHIRINZADEH B. Development of a flexure-based 3-RRR parallel mechanism for nano-manipulation[C]// IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Singapore: IEEE, 2009: 1324-1329.
[10] SALINIC S, NIKOLIC A. A new pseudo-rigid-body model approach for modeling the quasi-static response of planar flexure-hinge mechanisms[J]. Mechanism and Machine Theory, 2018, 124: 150-161.
[11] MERLET J P. Redundant parallel manipulators[J]. Laboratory Robotics and Automation, 1996, 8(1): 17-24.
[12] GOSSELIN C, SCHREIBER L T. Redundancy in parallel mechanisms: a review[J]. Applied Mechanics Reviews, 2018, 70(1): 010802.
[13] KANG L, KIM W, YI B J, et al. Modeling and analysis of parallel mechanisms with both kinematic and force redundancies via screw theory[J]. Journal of Mechanisms and Robotics, 2017, 9(6): 061007.
[14] ������, �, ����, ��. �����ɶ����沢������UP+R����ѧ����[J]. �й���е����, 2013, 24(15): 2081-2087.
ZHOU Yulin, LI Bo, YANG Long, et al. Statics analysis of a spherical parallel mechanism UP+R with 2-DOF[J]. China Mechanical Engineering, 2013, 24(15): 2081-2087.
[15] ·���, �Ű�÷, �ܾ�, ��. 3-RSS/S���������ľ���ѧ������ʵ���о�[J]. ��е���, 2013, 30(3): 26-31.
LU Guangda, ZHANG Aimei, ZHOU Jing, et al.Statics analysis and examination research of 3-RSS/S parallel mechanism[J]. Journal of Machine Design, 2013, 30(3): 26-31.
[16] ������, �����, ��Ծ��, ��. 4-RRS�������沢�������ľ���ѧ��նȷ���[J]. ��е����ѧ��, 2015, 51(11): 8-15.
QU Haibo, LIANG Yihan, FANG Yuefa, et al.Statics and stiffness analysis of 4-RRS redundant spherical parallel mechanism[J]. Journal of Mechanical Engineering, 2015, 51(11): 8-15.
[17] ��С��, ����, ����־, ��. ������������ѧ����[J]. ũҵ��еѧ��, 2007, 38(2): 201-203, 207.
YIN Xiaoqin, MA L��, YANG Qizhi, et al. Static analysis of parallel mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(2): 201-203, 207.
[18] LI Yonggang, SONG Yimin, HUANG Tian, et al. Static force analysis of lower-mobility parallel manipulators[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 80-83.
[19] ������, ������, ����, ��. �����ɶȲ��������˻����ľ�������[J]. ��е����ѧ��, 2007, 43(9): 80-83.
LI Yonggang, SONG Yimin, HUANG Tian, et al. Static force analysis of lower-mobility parallel manipulators[J].Chinese Journal of Mechanical Engineering, 2007, 43(9): 80-83.
[20] HU Bo, LU Yi. New approach for analyzing the stiffness of 3-RPS parallel manipulator[J]. Journal of Mechanical Engineering, 2010, 46(1): 24-29.
[21] LU Yi, HU Bo, YU Jiang. Analyses of the stiffness and elastic deformation of a 2(3-SPR) serial-parallel manipulator[J]. Journal of Multi-body Dynamics, 2009, 223(3): 189-198.
[22] ������, ������, ������. ��������������е�Ⱦ���ѧ���ܷ���[J].ũҵ��еѧ��, 2019, 50(1): 383-389.
WANG Xiaolei, JIN Zhenlin, LI Xiaodan.Analysis of static performance of serial-parallel hybrid bionic mechanical leg[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(1): 383-389.
[23] ��־��, ��ӭ��, �O����. 3UPS-RPR���������ľ���ѧ����[J]. ���ҵ��ѧѧ��, 2018, 37(5): 83-88.
FENG Zhiyou, NI Yingzhen, YUN Jintian. Static analysis of 3UPS-RPR parallel mechanism[J].Journal of Tianjin Polytechnic University, 2018, 37(5): 83-88.
[24] ���, ����, ��ӭ��, ��. һ�����Ͳ�����˳��ͷ�ľ���ѧ����[J]. ��е����, 2018, 42(2): 126-131.
LI Baokun, WANG Kang, HAN Yingge, et al. Statics analysis of a new type of probe with parallel compliant constraint[J]. Journal of Mechanical Transmission, 2018, 42(2): 126-131.
[25] MOOSAVIAN A,XI F F.Statically redundant parallel robots[J]. Meccanica,2016,51(7):1623-1637.
[26] MOOSAVIAN A, XI F F.Modular design of parallel robots with static redundancy[J]. Mechanism and Machine Theory, 2016, 96: 26-37.
[27] WEN K, SHIN C B, SEO T W, et al. Stiffness synthesis of 3-DOF planar 3RPR parallel mechanisms[J]. Robotica, 2016, 34(12): 2776-2787.
[28] KOCK S, SCHUMACHER W. A parallel x-y manipulator with actuation redundancy for high-speed and active-stiffness applications[C]// IEEE International Conference on Robotics & Automation. Leuven, Belgium: IEEE, 1998: 2295-2300.
[29] LIAN Binbin, SUN Tao, SONG Yimin, et al. Stiffness analysis and experiment of a novel 5-DoF parallel kinematic machine considering gravitational effects[J]. International Journal of Machine Tools & Manufacture, 2015, 95: 82-96.
[30] SUN Tao, LIAN Binbin, Song Yimin, et al. Elasto-dynamic optimization of a 5-DoF parallel kinematic machine considering parameter uncertainty[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 315-325.
[31] SUN Tao, YANG Shuofei. An approach to formulate the Hessian matrix for dynamic control of parallel robots[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(1): 271-281.
[32] SUN Tao, YANG Shuofei, LIAN Binbin. Finite and instantaneous screw theory in robotic mechanism[M]. Singapore: Springer, 2020: 25-65.
[33] SUN Tao, LIAN Binbin, YANG Shuofei, et al. Kinematic calibration of serial and parallel robots based on finite and instantaneous screw theory[J]. IEEE Transactions on Robotics, 2020, (99): 1-19.
[34] BOUDREAU R, NOKLEBY S. Force optimization of kinematically-redundant planar parallel manipulators following a desired trajectory[J]. Mechanism and Machine Theory, 2012, 56(56): 138-155.
[35] WEIHMANN L, MARTINS D, COELHO L S, et al. Force capabilities of kinematically redundant planar parallel manipulators[C]// 13th World Congress in Mechanism and Machine Science. Guanajuato, Mexico, 2011: IMD123.
[36] BI Z M, KANG B. Enhancement of adaptability of parallel kinematic machines with an adjustable platform[J]. Journal of Manufacturing Science and Engineering, 2010, 132(6): 061016.
[37] QU Haibo, GUO Sheng. Kinematics analysis of a novel planar parallel manipulator with kinematic redundancy[J]. Journal of Mechanical Science and Technology, 2017, 31(4): 1927-1935.
[38] ARAKELIAN V, BRIOT S, YATSUN S, et al. A new 3-DOF planar parallel manipulator with unlimited rotation capability[C]// 13th World Congress in Robot and Machine Science.Guanajuato, Mexico, 2011: IMD123.
[39] GOGU G. Structural synthesis of parallel robots, part 2: translation topologies with two and three degrees of freedom[M]. Springer-Verlag New York Inc, 2009: 762.
[40] CHABLAT D, MOROZ G, ARAKELIAN V, et al. Solution regions in the parameter space of a 3-RRR decoupled robot for a prescribed workspace// Latest Advances in Robot Kinematics[M]. LENARCIC J, HUSTY M, eds. Springer, 2012: 357-364.
[41] �Ʋ�ϼ, սǿ, ½��. ����������ṹ����IJ����������ݴ�����[J]. �������պ����ѧѧ��, 2010, 36(12): 1407-1411.
YAN Caixia, ZHAN Qiang, LU Zhen. Fault tolerance of parallel manipulator with actuation or structure redundancy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(12): 1407-1411.
[42] TSAI L W. Robot analysis: the mechanics of serial and parallel manipulators[M]. New York: John Wiley & Sons Inc, 1999: 285-286.
[43] Orientalmotor. ��������[EB/OL]. [2020-05-13]. https://www. orientalmotor. com. cn/file/service/tec. pdf.
Orientalmotor.Technical information[EB/OL]. [2020-05-13]. https: //www. orientalmotor. com. cn/file/service/tec. pdf.
(�༭ �²ӻ�)
�ո����ڣ� 2020 -04 -13; �����ڣ� 2020 -06 -22
������Ŀ(Foundation item)�������У��������ҵ���ר���ʽ�������Ŀ(2019JBM052)��������Ȼ��ѧ����������Ŀ(51875033) (Project(2019JBM052) supported by the Fundamental Research Funds for the Central Universities; Project(51875033) supported by the National Natural Science Foundation of China)
ͨ�����ߣ�����������ʿ�������ڣ����»���ѧ�ͻ����˼����о���E-mail��hbqu@bjtu.edu.cn

