基于外磁场耦合的血泵驱动系统
徐先懂1, 2,龚中良1,谭建平1
(1. 中南大学 机电工程学院,湖南 长沙,410083;
2. 空军第一航空学院 二系,河南 信阳,464000)
摘 要:基于横向旋转磁场的耦合原理,提出轴流式血泵外磁场驱动系统方案,设计一种泵机分离的结构。采用等效电流法建立了永磁体等效物理模型,计算血泵驱动系统的主动轮和从动轮之间的距离、相对转角以及磁极对数对血泵传动扭矩的影响。研究结果表明:在生理范围内,即主动轮与从动轮的安装距离小于60 mm,设计的永磁体输出的扭矩大于血泵需要的扭矩(6.4 N×mm),能够满足血泵的驱动要求。主动轮与从动轮的磁极对数是影响血泵系统性能的关键参数,主动轮与从动轮磁极对数越少,传动扭矩越大,但是扭矩波动也大;主动轮的磁极对数大于从动轮的磁极对数,驱动系统传动平稳,对控制有利。
关键词:外磁场耦合;轴流式血泵;磁力矩;磁极对数
中图分类号:TH132.4; R318.11 文献标识码:A 文章编号:1672-7207(2007)04-0711-04
Blood pump driven system based on extracorporeal magnetic filed couple
XU Xian-dong1, 2, GONG Zhong-liang1, TAN Jian-ping1
(1. School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. The Second Department, The First Aeronautical Institute of Airforce, Xinyang 464000, China)
Abstract: The extracorporeal magnetic filed driving system was proposed for axial flow blood pump based on coupling principle of transverse alternating flux. The driving principle of blood was described. According to equivalent current method, the equivalent physical model was constructed to calculate the torque varying with clearance, relative angle and magnetic pole number between driving magnetic gear and driven magnetic gear of blood pump driving system. The results show that in the physiological clearance, when the distance between two gears is less than 60 mm, the torque supplied by the designed permanents is greater than the necessary torque (6.4 N×mm) to drive blood pump. The smaller the magnetic pole number of magnetic gear, the larger the driving torque, but the stronger the torque fluctuating. If the magnetic pole number of driving gear is bigger than driven gear, the driving system is stable and favorable to be controlled. Hence, the proposed structure is feasible to drive blood pump.
Key words: extracorporeal magnetic filed coupling; axial flow blood pump; magnetic torque; magnetic pole number
血泵作为心室辅助装置,在结构、流体性能、控制性能以及材料等方面都有严格的生理要求[1-3],是典型的机电液集成装置。目前,有代表性的血泵[4-5](如Jarvik2000,Incor,HearMate等)都采用导线(或植入电池)供电方式,在结构上采用血泵本体与动力源合一的方式。而血泵的导线(管)容易引起术后出血、血栓和术后感染等并发症[6-8],不能长期植入,影响受体的生活质量。
为此,本文作者根据动力性主动脉瓣的构想[9],设计基于外磁场驱动(extracorporeal magnetic filed drive,EMFD)轴流式血泵。磁场耦合力矩的计算是EMFD轴流式血泵设计的关键技术,建立耦合磁场的计算模型,分析、计算磁场耦合力矩与旋转角度、结构参数之间的关系,确定永磁体的尺寸和磁路结构,论证基于外磁场驱动血泵的可行性。
1 EMFD轴流式血泵的工作原理
EMFD轴流式血泵系统由外磁场驱动部分、血泵本体和控制系统组成。血泵本体(称为血泵)由叶轮和永磁体组成,二者同轴由支架支撑,植入在升主动脉。外部由永磁体、励磁导线(二者构成血泵的动力源,称为电磁执行器,EMA)和控制系统组成。
血泵的旋转运动是根据永磁齿轮啮合原理[10],由外永磁体(称为主动轮,相关参数的角标用“er”表示)的旋转产生交变磁场驱动内永磁体(称为从动轮,相关参数的角标用“en”表示)。EMA由控制系统采用分时励磁法,实现外永磁体的旋转运动。利用永磁直流无刷电机的特点[11]设计EMA的结构,EMA工作原理与永磁无刷直流电机类似,根本区别是EMA的磁 场是开放的,以保证EMA为血泵本体提供驱动扭矩。图1所示为血泵驱动系统结构原理图。
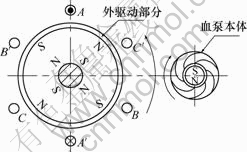
图1 外磁场耦合驱动原理图
Fig.1 Driving principle by EMF coupling
2 耦合磁场的计算模型
对于永磁体,表征铁磁特性的磁感应强度和磁场强度之间的关系曲线演变为退磁曲线。基于永磁体材料的退磁曲线,用等效电流法建立永磁体等效物理模型(如图2所示)。永磁体是一无源磁介质,引入磁化强度M,在磁介质发生均匀磁化后,有:
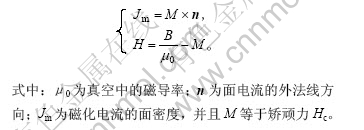
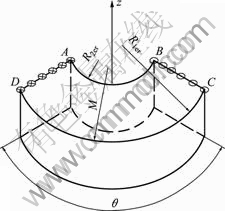
图2 等效面电流模型
Fig.2 Model of equivalent face current
在转矩计算时,把面电流沿着磁齿轮径向分割成若干份,每一份相当于一个线电流的作用。把1个磁齿轮的所有线电流对另一个所有线电流的作用相加,就可以得到总的转矩。为了计算耦合磁场的磁场强度,建立圆柱坐标系,其中2个圆柱坐标系Orθz和 的原点重合,并设在主动轮的几何中心(如图2所示);圆柱坐标系
的原点重合,并设在主动轮的几何中心(如图2所示);圆柱坐标系 的原点设在从动轮的几何中心;2个齿轮的中心距为d。对于从动轮,其径向场分量Br,en对传动扭矩有“贡献”。因此,只需推导主动轮产生的外磁场Ber在圆柱坐标系下的径向场分量即可。
的原点设在从动轮的几何中心;2个齿轮的中心距为d。对于从动轮,其径向场分量Br,en对传动扭矩有“贡献”。因此,只需推导主动轮产生的外磁场Ber在圆柱坐标系下的径向场分量即可。
主动轮的磁场计算方法是将永磁体模拟为等效电流的分布体,根据等效电流计算其场量[12]。主动轮在空间所产生的磁场,在圆柱坐标系Orθz下的径向场分量为:

由此得到在圆柱坐标系下的径向场分量Br,en为:

主动轮和从动轮的传动扭矩是相对转角θ的函数,其轴向分量为:

3 计算结果与讨论
3.1 扭矩特性计算
根据耦合磁场的计算模型,计算血泵的主动轮与从动轮的耦合力矩。计算时,首先建立永磁体实体模型,计算域有空气、永磁体、不锈钢3种材料,然后进行限元网格划分,计算磁场强度。磁场强度对称于极矩半角,因此,计算传动力矩时,主动轮和从动轮之间的相对转角为极矩半角,改变距离得到不同的传动扭矩。磁场耦合系统的参数如下:
永磁材料为N35,最大磁能积BH=285 kJ/m3,剩磁Br=1.23 T,矫顽力Hc=890 kA/m。主动轮的外径为42 mm,内径为10 mm,从动轮的直径为8 mm,空气的相对磁导率μr=1。
计算时,固定主动轮和从动轮之间相对转角,改变二者之间的距离,得到主动轮和从动轮之间的距离与传动扭矩之间的关系如图3所示;固定主动轮和从动轮之间的距离为5 mm,改变主动轮与从动轮之间的相对转角、极对数分别得到相应参数与传动扭矩之间的关系曲线如图4所示。其中,Per和Pen分别表示主动轮和从动轮的磁极对数。

图3 扭矩与距离的关系曲线(Per=4, Pen=2)
Fig.3 Relative curve of torque to clearance
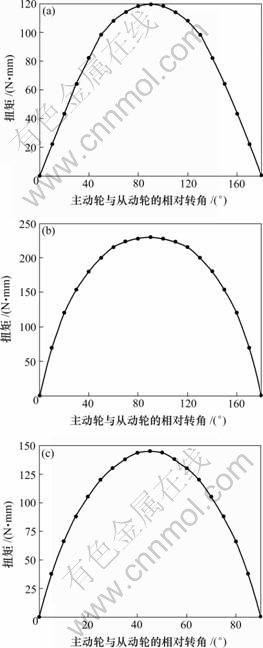
(a)Per=2,Pen=4; (b) Per=2, Pen=2; (c) Per=4, Pen=2
图4 磁极对数不同时扭矩与角度的关系曲线
Fig.4 Relative curves of torque to angle with different magnetic pole numbers
3.2 讨论
因永磁体的体积越大,其磁能增加,磁力驱动系统扭矩必然增加。但是,血泵系统的要求是尽量减小体积,便于植入和携带,有利于提高受体的生活质量。因此,在保证驱动系统要求的前提下,尽量减小永磁体的尺寸。
a. 从图3可以看出,主动轮与从动轮之间的距离越大,扭矩越小。血泵与外驱动部分之间的距离约为60 mm,血泵的理论输出峰值功率为8 W,转速为 12 000 r/min,需要的扭矩约为6.4 N×mm,计算扭矩为11 N×mm。
b. 当两永磁体极对数为Per=Pen=2时,主动轮与从动轮之间的作用扭矩最大,但是,当主动轮与从动轮周期性地旋转时,扭矩波动比较大;Per=Pen=4时,扭矩最小,扭矩波动小;
c. 当Per≥Pen,即主动轮的极对数比从动轮的极对数多时,扭矩大。由机械原理知,
如果从从动轮的转速考虑,取Per≥Pen,主动轮转速小,而从动轮可以获得比较大的转速。当Per=4,Pen=2时(如图4(c)所示),从动轮的转速为主动轮转速的2倍。在血泵额定转速下,EMA的转速降低(与磁极数相同或其他情况相比),有利于减小由于高速带来的温升和可能出现的振动等因素的影响。
4 结 论
a. 基于外磁场耦合驱动血泵是可行的,设计的磁场耦合系统参数满足血泵的驱动要求。可采用外磁场耦合的方式为血泵提供驱动能量。
b. EMFD血泵在结构上采用泵机分离,克服泵、机合一结构的不足。血泵的控制系统集中在外部,不需考虑外部与内部之间的通讯问题,避免血泵系统的穿皮导线,同时,也可以采用比较复杂控制策略,以满足受体的生理需求。
c. 主动、从动轮的极对数相等且极对数少时,传动扭矩最大;当主动轮的极对数大于从动轮的极对数时,驱动系统传动平稳,对控制有利。
参考文献:
[1] Smith W A, Allaire P, Antaki J, et al. Collected nondimension performance of rotary dynamic blood pump[J]. ASAIO Journal, 2004, 50: 25-32.
[2] Kazumitsu S, Masahiro A,Yoshinori M. Development of an axial flow blood pump: characteristics of a magnetic fluid seal[J]. Journal of Artificial Organs, 2001, 4(3): 245-251.
[3] Yukihiko N, Koji K. Development of a non-pulsatile permanent rotary blood pump[J]. European Journal of Cardio-thoracic Surgery, 1997, 11(4): s32-s38.
[4] Frazier O H, Myers J, Jarvik K, et al. Research and development of an implantable, axial-flow left ventricular assist device: the Jarvik 2000 heart[J]. The Annals of Thoracic Surgery, 2001, 71(3): s125-s132.
[5] Salzberg S, Lachat M, Zund G, et al. Left ventricular assist device as bridge to heart transplantation-lessons learned with the MicroMed DeBakey axial blood flow pump[J]. European Journal of Cardio-thoracic Surgery, 2003, 24(1): 113-118.
[6] Kiyotaka F. New technologies for mechanical circulatory support: current status and future prospects of CorAdide and MagScrew technologies[J]. Journal of Artificial Organs, 2004, 7(2): 45-57.
[7] Shinn A J. Implantable left ventricular assist devices[J]. Journal of Cardiovascular Nursing, 2005, 55(20): s22-s30.
[8] Holman L, Pamboukian V, Blood M, et al. Managing device infections: are we progressing or is infection an insurmountable obstacle[J]. ASAIO Journal, 2005, 51: 452-455.
[9] LI Guo-rong, MA Wei-guo, ZHU Xiao-dong. Development of a new left ventricular assist device: the dynamic aortic valve[J]. ASAIO Journal, 2001, 47: 257-260.
[10] Ikuta K, Makita S, Arimoto S. Non-contact magnetic gear for micro-transmission mechanism[C]//Proceedings of the 1991 IEEE Micro Electro Mechanical Syste. Nara, 1991: 125-130.
[11] 揭贵生, 马伟明. 一种基于自适应输入-输出线性化的无刷直流电机参数辨识方法[J]. 中南大学学报: 自然科学版, 2005, 36(6): 1069-1073.
JIE Gui-sheng, MA Wei-ming. A parameter identification method of brushless DC motor based on adaptive input-output linearization[J]. Journal of Central South University: Science and Technology, 2005, 36(6): 1069-1073.
[12] Furlani E P, Knewtson M A. A three-dimensional field solution for permanent-magnet axial-field motors[J]. IEEE Transaction on Magnetics, 1997, 33(3): 2322-2325.
收稿日期:2006-10-26
基金项目:国家自然科学基金资助项目(50275151)
作者简介:徐先懂(1964-),男,山东定陶人,博士研究生,从事机电液集成系统及智能控制研究
通讯作者:徐先懂,男,博士研究生;电话:0731-8830292;E-mail: Xdxu38@163.com

