Gait simulation of new robot for human walking on sand
来源期刊:中南大学学报(英文版)2009年第6期
论文作者:张立勋 王令军 王凤良 王克宽
文章页码:971 - 975
Key words:robot; gait simulation; sand bearing characteristic; compliance control
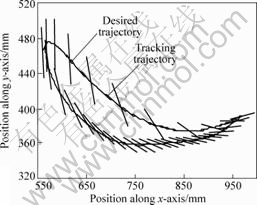
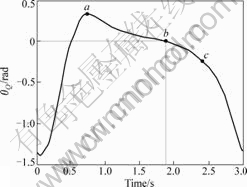
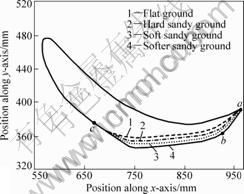
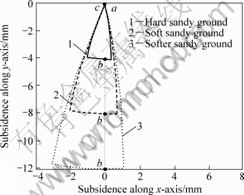
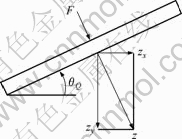
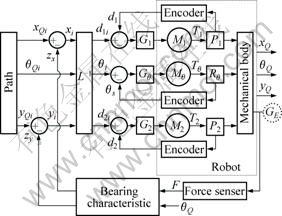
Abstract: In order to simulate the gait of human walking on different terrains a new robot with six degrees of freedom was proposed. Based on sand bearing characteristic compliance control was introduced to control system in horizontal and vertical movement directions at the end of the robot, and position control in attitude. With Matlab/Simulink toolbox, the system control models were established, and the bearing characteristics of rigid ground, hard sand, soft sand and softer sand were simulated. The results show that 0, 0.62, 0.89 and 1.12 mm are the maximal subsidences of the four kinds of ground along the positive direction of x-axis, respectively, and 0, -0.96, -1.99 and -3.00 mm are the maximal subsidences along the negative direction of x-axis, respectively. Every subsidence along y-axis is negative, and 0, -4.12, -8.23 and -12.01 mm are the maximal subsidences of the four kinds of ground, respectively. Simulation results show that the subsidence of footboard points to inferior anterior in early stage of stand phase, while points to posterior aspect in late stage. The subsidence tends to point to posterior aspect in the whole. These results are basically consistent with the gait characteristics of human walking on sand. Gait simulation of the robot for human walking on sand is achieved.
基金信息:the National Natural Science Foundation of China

 (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7)
 (8)
(8)