基于区间正交小波变换的多尺度实时Kalman滤波器设计
时伟1, 2,陈建群2
(1. 中南大学 粉末冶金研究院,湖南 长沙,410083;
2. 中南大学 航空航天学院,湖南 长沙,410083)
摘要:针对导航系统中惯性元器件的降噪问题,设计一种基于区间正交小波变换的多尺度实时Kalman滤波算法。该算法利用区间正交小波变换抑制边界效应的能力及其滑动数据窗口内实时分解特性,建立动态系统的多尺度实时Kalman滤波框架。Allan方差分析结果表明:在陀螺信号滤波中,给定小波分解尺度,该算法在保持一定实时性的同时,可以取得较好的滤波效果,滤波后的噪声系数比标准Kalman滤波减少至少1个数量级。
关键词:惯性元件;降噪;区间正交小波变换;卡尔曼滤波;实时性
中图分类号:V249.3 文献标志码:A 文章编号:1672-7207(2011)09-2712-08
Design of multi-scale real-time Kalman filtering based on interval orthogonal wavelet transform
SHI Wei1, 2, CHEN Jian-qun2
(1. Powder Metallurgy Research Institute, Central South University, Changsha 410083, China;
2. School of Aeronautics and Astronautics, Central South University, Changsha 410083, China)
Abstract: To solve the practical problem of inertial components de-noising in INS, a multi-scale real-time Kalman filtering based on interval orthogonal wavelet transform was proposed. With the ability of the interval wavelet transform to restrain terrible edge effects and its real-time decomposition characteristics in a sliding data window, a multi-scale dynamic systems framework for real-time Kalman filter was established. The results show that under the condition of given wavelet decomposition scale, the algorithm, while maintaining a certain real-time, has a good performance, and variances of filter errors are reduced by at least one order of magnitude.
Key words: inertial components; de-noising; interval orthogonal wavelet transform; Kalman filtering; real-time
作为测量载体线运动和角运动的惯性传感器,在实际应用中,其输出信号常常受到确定性干扰和随机性干扰的影响。确定性干扰具有规律性,可以通过实时补偿法进行消除,而随机性干扰具有不确定性,近似于噪声,实时补偿法很难消除随机噪声的影响,造成漂移很大,从而导致导航系统精度随时间迅速下 降[1]。常用的方法是用滤波来减小随机漂移的影响。侯青剑等[2-3]采用Kalman滤波算法对陀螺输出数据进行滤波处理,结果表明:在模型较准的情况下,Kalman滤波算法能取得较好的效果。刘镇平等[4-5]利用小波多分辨率理论对陀螺仪输出信号进行分析,仿真结果表明:小波分析具有良好的降噪效果,能有效改善陀螺的主要技术参数,具有较高的工程应用价值。Kalman滤波器的优点是线性、无偏、最小误差方差估计,但在不准确的信号模型下,基于单一尺度的标准Kalman滤波可能会带来较大误差甚至发散。小波分析具有多分辨率分解特性,信号在多尺度框架下可以得到比单一尺度更多的信息[6],因此,在传统Kalman滤波器的基础上结合小波变换的多尺度特性,滤波器的降噪效果将比单一尺度的Kalman滤波器的降噪效果好。高玉凯等[7]应用小波Kalman滤波算法对激光陀螺角随机游走的估计进行了仿真研究,该方法的实质在线分析噪声特性,提供有力的帮助,但未考虑变换结果可能会出现边界效应的问题。覃方君等[8]提出了一种基于小波Kalman滤波的加速度计降噪算法。算法实质是一种基于小波多尺度分解和重构的观测噪声实时在线估计,是单一尺度上的Kalman滤波。秦侠等[9-12]研究了小波Kalman滤波算法,这些算法对于离线信号的处理具有较好的效果,不适合实时导航解算。实际上,有限长度的正交小波变换才具有实际应用的意义,但无限长度序列的多尺度分解应用到有限长度序列中时必须考虑边界效应。而一般L2(R)中的小波变换没能有效地抑制边界效应,在变换后的信号边缘处出现较大的值,使得在Kalman滤波过程中出现较大的偏差。区间正交小波变换[13]可以较好地克服边界效应,为Kalman滤波提供平稳的输入。此外,基于数据块的Kalman滤波是在当前测量数据块和最近的状态估计数据块中进行的,块越长,估计精度越高,但滤波延迟越长。因此,还必须考虑滤波器的块长度和实时性要求。基于此,本文作者采用区间正交小波变换构造多尺度实时卡尔曼滤波模型,有效地解决了多尺度估计的实时滤波问题。
1 区间正交小波变换
1.1 有限长度信号序列的正交变换
给定一个变换,把有限长度的信号序列变换到有限长的序列,同时保持正交性和变换的可逆性,在实际信号处理中具有重要意义。基于小波变换的正交矩阵算法,可以实现这一目标。在每个尺度上,给定一个正交变换,把在某一尺度上的近似信号分解成它下一尺度上的尺度系数和小波系数。
将给定的一个信号序列 分割成长度为M的数据块:
分割成长度为M的数据块:

其中:m表示第m个数据块。
有限长度信号的离散正交的小波变换表示为:

其中:G表示小波变换矩阵;D表示小波系数集合。
对于式,除Haar小波外,直接由小波滤波系数构成的R矩阵均存在边界问题[13]。为了消除边界影响,需要构造一个可以抑制边界效应的正交变换矩阵。
Konezny[13]给出了一种边界正交变换矩阵的构造方法,经过边界处理后的正交变换矩阵表示为:

其中:U0和U1分别表示小波低通和高通滤波器;Ul和Ur分别表示左边界和右边界滤波器;T表示转置。
 即为一定尺度下(令尺度为j,相应的矩阵表示为
即为一定尺度下(令尺度为j,相应的矩阵表示为 )的有限长度信号的正交分解矩阵。若对有限长度信号进行多层次分解(令最大分解层次为J),则完整的正交分解矩阵G的构造形式为
)的有限长度信号的正交分解矩阵。若对有限长度信号进行多层次分解(令最大分解层次为J),则完整的正交分解矩阵G的构造形式为

其中: ;I为单位矩阵。
;I为单位矩阵。
G即为有限长度信号的区间正交小波变换矩阵,其能较好地抑制边界效应[13]。
1.2 滑动数据窗口正交分解
对于一个给定的小波等效有限脉冲滤波器组,正交变换矩阵G是已知的,用式的最大计算量为(2b+K-2)(2b+K-3)N个加法和(2b+K-2)2N个乘法。实际上,每采样得到一个离散的数据xn时,就会把一个最“旧”的数据丢掉,计算量可以大大减少。
时伟等[14]给出了一个由Db2小波构造的带边界滤波器向量的正交变换矩阵,即


令 ,代入式,得到分量形式为:
,代入式,得到分量形式为:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 。
。
其中:i分别取0和1。
不难验证,当n=n+2时,存在下面的等式:
 ;
; ;
;
 ;
; ;
;
 ;
; 。
。
如果直接用式进行计算,至少需要60个乘法,低通和高通分解的计算复杂性都为O(KM)。而利用关系式以后,只需计算 ,
, 和
和 ,需要的乘法计算量可以降到12个,降幅达到80%,低通和高通分解的计算复杂性为O(2K+2)。特别是随着数据长度N的增加,计算量的相对降幅会更大。
,需要的乘法计算量可以降到12个,降幅达到80%,低通和高通分解的计算复杂性为O(2K+2)。特别是随着数据长度N的增加,计算量的相对降幅会更大。
利用关系式以后,每层分解中小波系数保留不变的个数为(2b-2),而低通和高通系数不变的个数都是b-1,而且单层正交分解小波系数保留不变的个数只与滤波器对数(决定数据长度)有关,与滤波器长度无关。可见:若把这种经过边界正交化处理的区间小波变换应用于多尺度卡尔曼滤波结构中,则将大大减少全结构分解的计算量,提高滤波算法的实时性。
2 动态系统区间正交小波分解
令常系数动态系统方程为:


其中: 为n维状态向量;
为n维状态向量; 为系统矩阵;
为系统矩阵; 为满足
为满足 和
和 的随机系统噪声序列;
的随机系统噪声序列; 为s维状态观测向量;
为s维状态观测向量; 为观测矩阵;
为观测矩阵; 为
为 和
和 的随机测量噪声序列。
的随机测量噪声序列。
根据动态系统多尺度分解的思想[6, 15-18],将状态向量序列{X(k)}和测量向量序列{Z(k)}分割成类似于式的数据块。
状态向量X(k)序列的第m个数据块Xm与第m+1个数据块Xm+1之间的关系[6]为:

其中:Am和Bm为关系矩阵。其矩阵元素满足:

(r=1, 2, …, M; c=r, r+1, …, M)


测量向量Z(k)的第m个测量数据块Zm与第m个状态向量数据块Xm之间的关系为

其中:Cm为对角矩阵,对角元素为C。
利用区间正交小波变换(式(5))对系统(式)进行多尺度分解,得到:

其中: 和
和 分别为第m个数据块Xm和第m+1个数据块Xm+1的多尺度分解;
分别为第m个数据块Xm和第m+1个数据块Xm+1的多尺度分解; ,Gq表示信号从第1层到第q层的分解矩阵;
,Gq表示信号从第1层到第q层的分解矩阵; 且
且

 ;Qm为对角矩阵,对角元素为 Qm(r, r)=Q,r=1, 2, …, 2M-1。
;Qm为对角矩阵,对角元素为 Qm(r, r)=Q,r=1, 2, …, 2M-1。
将同样的方法应用到观测方程中,得到:

其中: ;
; ,
, 为对角矩阵,对角元素为
为对角矩阵,对角元素为 ,r=1, 2, …, M。
,r=1, 2, …, M。
式和构成了本文多尺度实时Kalman滤波框架的基础。
3 多尺度实时Kalman滤波
3.1 多尺度Kalman滤波基本框架
根据前面的描述以及基本Kalman滤波框架,q尺度下的区间小波变换域Kalman滤波器表示如下:





其中: 表示尺度上的数据块m到数据块m+1的一步预测;
表示尺度上的数据块m到数据块m+1的一步预测; 表示q尺度上数据块m到数据块m+1的一步预测误差协方差阵;
表示q尺度上数据块m到数据块m+1的一步预测误差协方差阵; 表示q尺度上m+1状态数据块的估计;
表示q尺度上m+1状态数据块的估计; 表示q尺度上m+1状态数据块估计误差协方差阵;Km+1表示Kalman滤波增益。
表示q尺度上m+1状态数据块估计误差协方差阵;Km+1表示Kalman滤波增益。
这样,就得到q尺度上的状态数据块的估计 (m=1, 2, …)。最后,利用正交变换的逆变换,得到q尺度上状态数据块的估计:
(m=1, 2, …)。最后,利用正交变换的逆变换,得到q尺度上状态数据块的估计:

式和简记为INV-DWT-KF。
3.2 实时滤波框架
正交小波变换是基于数据块进行的,Kalman滤波基于当前测量数据块和最近的状态估计数据块进行,块越长,估计精度越高,但滤波延迟越长。本文考虑滤波器的块长度和实时性要求,建立区间正交小波变换Kalman滤波框架。基本思想如下。
(1) 考虑最小数据块M=2时的正交分解,Haar小波滤波器可以实现最小长度为2的正交分解,分解的最大尺度为1,对应的正交变换矩阵为:

利用INV-DWT-KF算法以及式,得到第m1+1数据块的估计结果及其重构:

其中:下标L和H分别表示低频分解系数和高频分解系数;上标1表示信号分解的最大尺度数为1;m1表示尺度为1的第m个数据块。以下参数定义类似。
采用同样的方法可以得到第m1+2数据块的估计及其重构

此时,称数据块长度为2、系统和测量模型为1尺度动态系统模型为1尺度模型,相应的Kalman滤波过程称为1尺度模型INV-DWT-KF递推估计。
(2) 当数据块长度为4时,状态向量和测量数据块分解的最大尺度为2,这里同样采用Haar小波作为基小波,对应的正交变换矩阵为:

类似于1尺度模型,得到2尺度模型的第m2+1和m2+2数据块的估计及其重构:




其中:m2+1= m1+2。
此时,称数据块长度为4、系统和测量模型为2尺度的动态系统模型为2尺度模型,相应的Kalman滤波过程称为2尺度模型INV-DWT-KF递推估计。
比较式,和,不难发现2尺度模型估计 包括k+1~k+4时刻的估计,1尺度估计
包括k+1~k+4时刻的估计,1尺度估计 和
和 中也包括k+1~k+4时刻的估计。由于数据块越长估计精度越高,所以,的精度要高于和,但2尺度模型估计延迟是1尺度模型的2倍。因此,为了尽量做到实时信号处理,采用1尺度模型作为2尺度模型估计的中间过程,即1尺度模型第m1+3数据块(k+5和k+6时刻)的估计初值不用,而是采用当前最新2尺度估计
中也包括k+1~k+4时刻的估计。由于数据块越长估计精度越高,所以,的精度要高于和,但2尺度模型估计延迟是1尺度模型的2倍。因此,为了尽量做到实时信号处理,采用1尺度模型作为2尺度模型估计的中间过程,即1尺度模型第m1+3数据块(k+5和k+6时刻)的估计初值不用,而是采用当前最新2尺度估计 和
和 ,提高1尺度的估计精度。
,提高1尺度的估计精度。
(3) 类似于(1)和(2)的思想,建立3尺度及其以上多尺度估计模型。例如:对于3尺度模型,数据块长度为8。因为Haar函数是小波分析中最简单的一个具有紧支撑的正交小波函数,其分析和综合性能一般没有其他小波的好,比如Daubechies小波函数提供了比Haar小波更有效的分析和综合性能。因此,当最大分解尺度大于等于3时,根据信号的特性选择基小波,按式的方法构造一个区间正交变换矩阵G3。
类似于1尺度和2尺度模型的估计方法,可以得到数据块长度为8的Kalman滤波估计结果及其重构:



其中:m3+1=m2+2。
此时,称数据块长度为8、系统和测量模型为3尺度的动态系统模型为3尺度模型,相应的Kalman滤波过程称为3尺度模型INV-DWT-KF递推估计。
比较式,和,不难发现3尺度模型估计 包括k+1~k+8时刻的估计,2尺度估计和
包括k+1~k+8时刻的估计,2尺度估计和 中也包括k+1~k+8时刻的估计,且的精度要高于和,但3尺度模型估计延迟是2尺度模型的2倍,是1尺度模型的4倍。为了尽量做到实时信号处理,把1尺度模型和2尺度模型估计作为3尺度模型估计的中间过程,即1尺度模型第m1+5数据块(k+9和k+10时刻)的估计初值不用
中也包括k+1~k+8时刻的估计,且的精度要高于和,但3尺度模型估计延迟是2尺度模型的2倍,是1尺度模型的4倍。为了尽量做到实时信号处理,把1尺度模型和2尺度模型估计作为3尺度模型估计的中间过程,即1尺度模型第m1+5数据块(k+9和k+10时刻)的估计初值不用 和,而是采用当前最新3尺度估计
和,而是采用当前最新3尺度估计 和
和 ,提高1尺度模型的估计精度;2尺度模型第m2+3数据块(k+9~k+12时刻)的估计初值不用,而是采用当前最新3尺度估计
,提高1尺度模型的估计精度;2尺度模型第m2+3数据块(k+9~k+12时刻)的估计初值不用,而是采用当前最新3尺度估计 ,
, ,和,提高2尺度模型的估计精度。
,和,提高2尺度模型的估计精度。
综合(1)~(3)步,多尺度实时Kalman滤波框架如图1所示(M=8,J=3)。
3.3 算法分析
3.3.1 收敛性分析
无论现象或过程是否具有多尺度特性,观测信号是否在不同尺度或分辨级上得到的,利用多尺度算法往往能获得更多的信息,从而降低问题的不确定性及复杂性[6]。把基于模型的动态系统分解到多尺度空间中,针对不同的空间建立相应的Kalman滤波模型,这样做的好处是把原系统的不确定性分散到多个尺度空间中,降低Kalman滤波存在不稳定的风险,从而具有提高滤波收敛速度和精度的作用。
3.3.2 复杂性分析
为方便分析问题,考虑一维信号的INV-DWT-KF估计,并设标准Kalman滤波周期为T。图1所示为尺度实时Kalman滤波器框架。从图1可以看出:在k时刻,需要进行3个不同尺度模型的INV-DWT-KF估计,它们分别是1,2和3尺度模型估计。3尺度模型的计算量相当于8维标准Kalman滤波的计算量,滤波周期为8T。因为N维标准Kalman滤波的计算复杂性为O(N3),所以,基于3尺度模型的INV-DWT-KF的计算复杂度为O(83),其他2个模型估计计算复杂性分别为O(23)和O(43)。
上面的分析可以推广到n维信号,最大尺度模型为J的估计。在k时刻,基于q(1≤q≤J)尺度模型的INV-DWT-KF估计复杂性为O((2qn)3),1~J尺度模型的INV-DWT-KF估计总计算复杂性为O((2n)3(23J-1)/7)。
综上所述,n维信号的J尺度INV-DWT-KF估计的计算量约是2Jn维标准Kalman滤波的计算量,滤波周期为2JT。可见随着尺度J的增大,INV-DWT-KF增加的计算量是不可想象的,这是INV-DWT-KF算法的一个弊端。但对于低维Kalman滤波算法,J取较小值(比如J≤4)时,算法的复杂性是可以接受的。
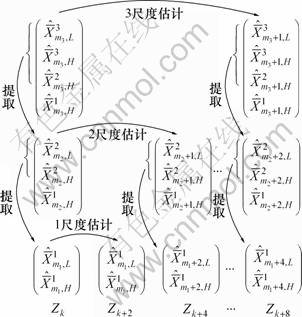
图1 多尺度实时Kalman滤波器框架
Fig.1 Framework of multi-scale real-time Kalman filter
4 实验结果与讨论
为验证算法的有效性,以实测光纤陀螺(FOG)输出信号为例,研究算法的性能。
4.1 FOG多尺度卡尔曼滤波模型
通过AR建模获得的FOG输出零漂 ARMA(2,1)模型描述如下:

式中: ,
, 和
和 为模型系数,为已知量;
为模型系数,为已知量; 为模型拟合残差,一般认为是白噪声。
为模型拟合残差,一般认为是白噪声。
根据式,系统状态方程可以表示为:

式中: ;
;
 ;
; ;
; ;
; 。
。
以实际测量数据作为观测量Z(k),设V(k)为测量噪声,则量测方程为:
式中: ;
; ;
; 。
。
根据第2节动态系统区间正交小波分解思想,将式和代入式,可以得到类似于图1所示的多尺度滤波框架。
本文选取小波分解的最大尺度为3,且1尺度和2尺度分解小波基选取Haar小波,3尺度分解小波基选取Daubechies小波。
4.2 滤波性能评价
通常FOG零漂数据中包括角随机游走(N)、零偏不稳定性(B)、速率随机游走(K)、速率漂移斜坡(R)和量化噪声(Q)共5个噪声项。Allan方差法是测量和评价FOG各类误差和噪声特性的一种有效手段,它对于FOG的噪声表征和优化设计具有重要价值。Allan方差法对零漂信号进行分析能得出这5个噪声项的系数。因此,本文应用Allan方差分析比较Kalman滤波(KF)和INV-DWT-KF 2种算法的滤波性能。
4.3 结果分析
图2~4所示分别为光纤陀螺实际输出、KF滤波输出、INV-DWT-KF滤波输出后的Allan标准差曲线。表1所示为拟合的噪声源误差系数。
从图2可以看出:FOG原始数据的Allan双对数曲线形状比较复杂,说明其中含有多种噪声。在0.02~0.04 s内,曲线趋于平直,主要表现为零偏稳定性噪声;在0.04~0.06 s内,斜率约为-1,主要表现为量化噪声;在0.06~0.08 s内,斜率约为1/2,主要表现为速率斜坡噪声或速率斜坡。在0.1~70 s内有包括指数相关噪声在内的各种噪声混杂在一起。
在图3经过KF滤波后的Allan双对数曲线中,0.02~0.04 s内的零偏稳定性噪声以及0.04~0.06 s内量化噪声明显减少,降幅达10倍以上,0.1~70 s内各种噪声的量值也有明显减少。由图4可见:经过INV-DWT-KF滤波后的Allan标准差幅值较KF滤波又有大幅下降,且部分噪声已不是很明显,说明通过引入多尺度框架的卡尔曼滤波器,使数据中的各主要噪声都受到较大程度地抑制。
从表1可以看出:通过KF滤波和INV-DWT-KF滤波后的各噪声项系数都有大幅度下降,但基于INV-DWT-KF的滤波后的噪声误差系数比KF滤波结果低至少1个数量级。这主要是因为:在引入不准确的系统噪声和量测噪声统计特性的基础上,INV- DWT-KF滤波算法能把原系统的不确定性分散到多个尺度空间中,降低Kalman滤波存在不稳定的风险,从而具有提高滤波收敛速度和精度的作用。

图2 原始信号Allan标准差曲线
Fig.2 Allan standard deviation curve of original signal

图3 KF滤波后Allan标准差曲线
Fig.3 Allan standard deviation curve after KF filtering

图4 INV-DWT-KF滤波后Allan标准差曲线
Fig.4 Allan standard deviation curve after INV-DWT-KF filtering
表1 噪声源误差系数比较
Table 1 Error coefficient of noise source

5 结论
(1) 针对导航系统中惯性元器件的实时降噪问题,本文设计一种多尺度实时Kalman滤波框架,滤波后光纤陀螺输出信号的主要噪声误差系数比标准Kalman滤波的噪声误差系数低至少1个数量级。
(2) 在较小分解尺度下,算法计算量并没有增加太多,具有一定的实时性,满足导航系统实时导航解算的要求。
参考文献:
[1] 付梦印, 邓志红, 张继伟. Kalman滤波理论及其在导航系统中的应用[M]. 北京: 科学出版社, 2004: 92-94.
FU Meng-yin, DENG Zhi-hong, ZHANG Ji-wei. Kalman filtering theory and application in navigation system[M]. Beijing: Science Press, 2004: 92-94.
[2] 侯青剑, 缪栋, 彭云辉. 卡尔曼滤波在激光陀螺信号处理中的应用[J]. 计算机测量与控制, 2005, 13(11): 1287-1288.
HOU Qing-jian, MIAO Dong, PENG Yun-hui. Application of Kalman filter in processing laser gyro signal[J]. Computer Measurement & Control, 2005, 13(11): 1287-1288.
[3] 张海鹏, 房建成. MEMS陀螺仪短时漂移特性实验研究[J] . 中国惯性技术学报, 2007, 15(1): 100-104.
ZHANG Hai-peng, FANG Jian-cheng. Short-time drift characteristic of MEMS gyroscope[J]. Journal of Chinese Inertial Technology, 2007, 15(1): 100-104.
[4] 刘镇平, 张春熹, 王妍. 小波分析在捷联惯导陀螺信号滤波中的应用[J]. 中国惯性技术学报, 2005, 13(1): 77-85.
LIU Zhen-ping, ZHANG Chun-Xi, WANG Yan. Application of wavelet analysis in signal processing of gyros for strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2005, 13(1): 77-85.
[5] 高亚楠, 陈家斌. 基于小波分析的光纤陀螺信号处理[J]. 火力与指挥控制, 2005, 30(5): 35-37.
GAO Ya-nan, CHEN Jia-bin. Wavelet analysis in the signal processing of FOG[J]. Fire Control & Command Control, 2005, 30(5): 35-37.
[6] 文成林, 周东华. 多尺度估计理论及其应用[M]. 北京: 清华大学出版社, 2002: 32-33.
WEN Cheng-lin,ZHOU Dong-hua. Multiscale estimation theory and application[M]. Beijing: Tsinghua University Press, 2002: 32-33.
[7] 高玉凯, 邓正隆. 小波变换与卡尔曼滤波结合的RLG降噪方法[J]. 光电工程, 2005, 32(5): 31-34.
GAO Yu-kai, DENG Zheng-long. Wavelet-based Kalman filtering for ring laser gyro denoising[J]. Opto-Electronic Engineering, 2005, 32(5): 31-34.
[8] 覃方君, 许江宁, 李安, 等. 基于小波卡尔曼滤波的加速度计降噪方法[J]. 武汉理工大学学报: 交通科学与工程版, 2009, 33(1): 49-52.
QIN Fang-jun, XU Jiang-ning, LI An, et al. A wavelet based Kalman filter for accelerometers de-noising[J]. Journal of Wuhan University of Technology: Transportation Science & Engineering, 2009, 33(1): 49-52.
[9] 秦侠, 沈兰荪. 基于小波变换的卡尔曼滤波法在ICP-AES中的应用[J]. 光谱学与光谱分析, 2002, 22(6): 1009-1012.
QIN Xia, SHEN Lan-xun. Application of Kalman filtering based on wavelet transform in ICP-AES[J]. Spectroscopy and Spectral Analysis, 2002, 22(6): 1009-1012.
[10] 郭春, 罗鹏飞. 一种基于小波变换的机动目标跟踪算法研究[J]. 系统工程与电子技术, 2002, 24(6): 60-62.
GUO Chun, LUO Peng-fei. A maneuvering target tracking algorithm based on wavelet transform[J]. Journal of Systems Engineering and Electronics, 2002, 24(6): 60-62.
[11] 程红丽, 张登峰, 刘健. 一种改进的小波-卡尔曼配电网短期负荷预测方法[J]. 中国电力, 2006, 39(11): 58-61.
CHENG Hong-li, ZHANG Deng-feng, LIU Jian. An improved wavelet-Kalman filter based short term load forecasting for distribution systems[J]. Electronic Power, 2006, 39(11): 58-61.
[12] 阮兆文. 基于小波-卡尔曼的语音增强方法研究[J]. 通信技术, 2010, 43(4): 152-154.
RUAN Zhao-wen. Wavelet-based Kalman filtering for speech enhancement[J]. Communications Technology, 2010, 43(4): 152-154.
[13] Konezny M D. Improving the DWT-LMS algorithm: Boundary filter DWT matrix construction[C]//Proceeding of ASILOMAR-29 IEEE. Pacific Grove, CA, USA, 1995: 75-81.
[14] 时伟, 贺汉根. 区间正交小波变换域FLP算法及其在捷联寻北中的应用[J]. 国防科技大学学报, 2005, 27(4): 57-61.
HI Wei , HE Han-gen. Research on the algorithm of interval DWT domain FLP and its application in SINS[J]. Journal of National of University of Defense Technology, 2005, 27(4): 57-61.
[15] 文成林, 金锋, 周东华. 单传感器单模型动态系统多尺度分解与估计新算法[J]. 电子学报, 2002, 30(6): 819-822.
WNE Cheng-ling, JIN Feng, ZHOU Dong-hua. A new algorithm of multi-scale decomposition and estimation for single sensor and single model[J]. Acta Electronic Sinica, 2002, 30(6): 819-822.
[16] 周雪梅, 吴简彤. 多传感器多尺度融合估计在组合导航系统中的应用[J]. 中国惯性技术学报, 2005, 13(2): 41-44.
ZHOU Xue-mei, WU Jian-tong. Integrated navigation system using multisensor multiscale fusion estimation[J]. Journal of Chinese Inertial Technology, 2005, 13(2): 41-44.
[17] 王鹏伟, 吴秀清, 孙福明. 基于多尺度Kalman数据融合滤波[J]. 光电工程, 2008, 35(1): 110-115.
WANG Peng-wei, WU Xiu-qing, SUN Fu-ming. Data fusion filtering techniques based on multiscale Kalman filter[J]. Opto-Electronic Engineering, 2008, 35(1): 110-115.
[18] 赖莉, 李世泽, 罗懋康. 杂波抑制的分形处理: 小波多尺度自适应Kalman滤波[J]. 信息与电子工程, 2009, 7(3): 222-226.
LAI Li, LI Shi-ze, LUO Mao-kang. Fractal processing for clutter suppression: Wavelet-multi-scale adaptive Kalman filter[J]. Information and Electronic Engineering, 2009, 7(3): 222-226.
(编辑 杨幼平)
收稿日期:2011-02-22;修回日期:2011-05-03
基金项目:国家高技术研究发展计划(“863”计划)项目(2009AA034303);湖南省自然科学基金资助项目(11JJ3064);中南大学中央高校基本科研业务费专项(2011QNZT048)
通信作者:时伟(1975-),男,安徽寿县人,博士后,讲师,从事飞行器导航与控制技术研究;电话:13875960890;E-mail: ahshw@csu.edu.cn

