DOI: 10.11817/j.issn.1672-7207.2018.04.009
����3-D�������е�˫������˲�̬�滮��ʵ���о�
�½����������Σ�Ф����
(�人��ѧ �������еѧԺ������ �人��430072)
ժҪ��Ϊ�����˫�㲽�л����˶���ʵ��������Ӧ���������1�ֻ���3-D�������еIJ�̬�滮������ģ������������Ϊ�����ǵ���߶ȵı仯�����ȶ��忼���㲿�ؽ���ת�˶��ͻ���������(COM)��ֱ�߶ȱ仯��3-D�������С���Σ��ڵ������(SSP)�������˶����ſ���(OC)���ۺ����Ե�����ģ�� (LIMP)����������ص�켣������5�ζ���ʽ��ֵ������˫�����(DSP)�������ص�켣������ʵ��������ֱ�߶ȱ仯�������㲿���˶�������ʹ�÷ֶ�����3��Hermite��ֵ�õ��㲿�˶��켣��Ȼ��ͨ��ţ��-���ѷ���������ؽڽǶȽ⡣�����NAO��������������ƽ�غ���б�������ߵĶ���ѧ���������ʵ�顣�о�������������Ĺ滮�������У��һ���������ƽ�ȣ���ƽ���б��2�ֵ��湤��������ʵ���У���Ӵ����IJ������ȱ���Ӧ�ķ������ֱ����37.01%��59.94%���Źؽ����ز������ȷֱ����69.13%��62.75%��
�ؼ��ʣ�3-D�������У�˫������ˣ���̬�滮��б��
��ͼ����ţ�TP242.6 ���ױ�־�룺A ���±�ţ�1672-7207(2018)04-0831-08
Gait planning and experimental study of biped robot based on 3-D walking sequence
CHEN Jianfang, DING Jiatao, XIAO Xiaohui
(College of Power and Mechanical Engineering, Wuhan University, Wuhan 430072, China)
Abstract: In order to improve the adaptability of biped walking in the real environment, a novel gait planning method based on 3-D walking sequence was proposed. By imitating human walking behaviour and taking the change of ground height into consideration, 3D walking sequence (WS), which also considers the rotational motion of ankle joint and the vertical height of the robot, was firstly defined. Then, during single support phase (SSP), optimal control (OC) theory and linear inverted pendulum model (LIMP) were adopted for generation of zero moment point (ZMP) trajectories. The 5th order spline interpolation was used to generate ZMP trajectories and to produce the center-of-mass (COM) height variation during the double support phase (DSP). By employing motion parameters of the foot, the foot trajectory was also obtained by piecewise continuous cubic Hermite interpolation. After that, the Newton-Raphson method was used to solve the desired joint angle. Finally, dynamic simulation and hardware experiments of bipedal walking on flat and slope ground were carried out by employing the NAO robot. The results show that the proposed method is effective in practice and that the robot walks more stably in the real environment. Fluctuation range of the foot contact force of NAO robot in flat and slope conditions decrease by 37.01% and 59.94% respectively compared with those in simulation test, and fluctuation range of the hip joint decrease by 69.13% and 62.75%, respectively.
Key words: 3-D walking sequence; biped robot; gait planning; slope
�����������˫�㲽�л����˶���ʵ��������Ӧ������Ϊ�о��ȵ㡣Ŀǰ�����˫�㲽�л����˵IJ�̬�滮���ۻ�����KAJITA��[1]�����һ��������ά���Ե�����ģ�͵ľ��䲽̬�������ۣ�DASGUPTA��[2]���û��������ص�(ZMP)�ķ��������˲�̬�滮�о���FUJIMOTO��[3]ͨ����ưڶ����˫�㲽�л��������Ĺ켣��ⲽ̬����˫�㲽�л����˵����Ŀ��������Ե����ڣ��ڶ���ĩ�˵��˶��켣������2 ������ʱ�����ص��ƽ����������ʾ����־����[4]�����˻���ZMP�оݵĻ����˲���ģʽ�벽̬�滮�о���Ȼ���������о������ƽ�����ߵ��������Ի�����б�����ߣ�HUANG��[5]��ƽ��С��-����ģ�͵Ļ��������1��б��С��-����ģ�ͣ������������ص�켣������Ԥ�ۿ��Ƶõ����Ĺ켣���Ӷ�ʵ��б����ϡ����£�ZHOU��[6]����б���˶���Լ����ϵ������ѧģ��, �ҵ�������б���˶������Ž�, �Ӷ�ʵ�ֻ�����б���˶���NAGASUE��[7]�������������ص㲢����K����ڽӷ�ȷ�������ŵĻ�����б���˶��ĹؽڽǶȣ�ALI��[8]���2��б�沽̬�滮������һ�Dz��û���λ�úͷ�������˶�ѧ�����������ĸ߶Ȳ��䣬���ȶ�ƽ�ز�̬�滮��Ȼ�ù滮Ӧ�õ�б�µ����ϣ��������˫���Ե����ڵķ���������ţ��-���ѷ(Newton Raphson)�㷨��ʸ��ƽ��Ͳ���ƽ��IJ�̬���й滮��ȷ��ͬ�����÷����ɱ�֤���ĸ߶ȿɱ�[9]�����⣬����[10]�����˷��˻�����б�����ߵķ���������ģ�ͺ�˫�ȳ����Ե�����ģ�ͣ�����˻�����б������ͨ�ò�̬�滮��������Z[11]�Ƶ���б�沽�е�����-С��ģ�ͣ�ʵ���˻�������б����0.5 km/h���ٶ��ȶ����У���ʢ��[12]������ɲ������������ڵȲ������Ƶ�б���˶�ģʽ�����ݵ�����ԭ��ģ�Ͷ�б�²�̬�������Źؽں��ؽڵĹ켣�滮������ʵ��б���˶��IJ�̬�滮���ſ˵�[13]����С����������ѧϰ�ķ�����ȷ��������б���˶��IJ�̬����Щ�����ܹ�ʵ�����ĸ߶ȵ���ֱ����仯��������Ҫ�����Ƶ�б�����ߵ�ģ�͡��������������еIJ�̬�滮���ۻ����Լ������������гɹ�[14]�����1�ֻ���3-D�������еIJ�̬�滮������ģ������������Ϊ�����ǵ���߶ȵı仯�����忼���㲿�ؽ���ת�˶��ͻ�����������ֱ�߶ȱ仯��3-D�������У�Ȼ����NAO��������������ƽ�غ���б�������ߵĶ���ѧ���������ʵ�顣
1 3-D�������в����滮����
������˫����ε������˶��Լ��ڶ��ŵ���ת���������1��ʵʱ��̬���������ڹ滮�����ص�����Ĺ켣֮ǰ�����ȶ���3-D�������в���ģ��(���WSģ��)��������ε������ص�����Ĺ켣���Կ����ǻ���3D-LIPM�����ſ������⡣�������ſ������ۣ������������ڼ�������ص�켣��ͨ�����Ե��������ĵij�ʼ����ֹλ�ã����Ա�֤�ڲ����Ͳ����仯(���������ڲ����Ͳ�����ͬ)������£�ʹ������������ص�λ��Ϊ0 mm��Ϊ�˱�֤˫����͵������ڼ��λ�á��ٶȺͼ��ٶȵ������ԣ�������ζ���ʽ��ֵ������˫����ε������ص�켣��Ȼ��������-С��ģ����ֵ���[15]�õ����������Ĺ켣���÷ֶ�������3��Hermite��ֵ�õ��㲿ƽ�ƺ���ת�켣��
1.1 3-D���������
���˵IJ�̬���ƣ�˫�㲽�л����˵IJ�̬���Է�Ϊ�����Σ���ͼ1��ʾ��һ�������IJ���״̬����2����������(���ҽŶԳ�)��ÿ�����ڰ����������˫���ࡣ���У��������Ϊ�����к�ֹ��3���Ρ�
ͼ2��ʾΪ����Sstep�Ķ��塣���У���ǰ����ֱ��ʾ���߷���������������ϵ(���������߾���ԭ��)���㲿֧������ϵ(�ֲ�����ϵ)һ�£�L��W�ֱ�Ϊ�����Ͳ������ϱ�i��ʾ��i��֧�����ڣ�xΪ����ǰ��λ�ƣ�yΪ����λ�ƣ�(xinii,yinii)��(xendi,yendi)�ֱ�Ϊ��i�����ڵ������ڼ����ĵij�ʼ����ֹ״̬��pymax�� pymin��pxmax��pxmin�ֱ�Ϊ�ֲ�����ϵԭ��������㲿֧���ı��εľ��룬�������ص��ȶ���ȡ�ͼ3��ʾΪ������β���Sfoot�Ķ��塣���У�PCOMΪ����λ�ã�ZcΪ�������ڼ����ĺ͵���Ĺ̶��߶ȣ���1Ϊ��������ǣ���2Ϊֹ����������ǣ�T1Ϊ��ʱ�䣻T2Ϊֹ����ʱ�䣻ZgΪ���㲿֮��Ĵ�ֱ�߶ȱ仯���������������£�
 (1)
(1)
 (2)
(2)
 (3)
(3)
ʽ�У�SstepΪ����������˫�����״̬����(��ͼ2)��SfootΪ���������е������״̬����(��ͼ3)��TsΪ������ʱ�䣻TdΪ˫����ʱ�䣻��gΪ������ǣ�lΪ�ڶ��ȵ������ظ߶ȣ�ZgΪ���㲿֮��Ĵ�ֱ�߶ȱ仯��

ͼ1 ˫�㲽������ʾ��ͼ
Fig. 1 Diagram of biped gait phases

ͼ2 ����Sstep�Ķ���
Fig. 2 Definition of Sstep parameter

ͼ3 ������β���Sfoot�Ķ���
Fig. 3 Definition of Sfoot parameters for swing foot during SSP
1.2 ��̬�滮
1.2.1 ������ε�ZMP�켣����
���IJ�����ά���Ե���ģ��(3D-LIPM)��ⵥ����ε�ZMP�켣[1]����������˵�����������������1���㣬�ڴ�ֱ����û���˶���ͨ��3D-LIPM �ֱ�õ������ص�����ĵ�λ�Ʊ��﹫ʽ��
 (4)
(4)
 (5)
(5)
 (6)
(6)
ʽ�У� px��py�ֱ�Ϊ�����ص�ǰ��Ͳ����λ�ƣ� ��
�� �ֱ�Ϊ���ĵ�ǰ��Ͳ���λ�Ƽ��ٶȣ�wΪ����Ƶ�ʣ�gΪ�������ٶȡ�
�ֱ�Ϊ���ĵ�ǰ��Ͳ���λ�Ƽ��ٶȣ�wΪ����Ƶ�ʣ�gΪ�������ٶȡ�
��ʱ��Ts�ڣ����Ĵӳ�ʼ״̬ת�Ƶ���ֹ״̬��Ϊ�������ȶ��ԣ��������ڼ������ص�λ��ʼ��Ϊ0 mm��
1.2.2 ˫����ε������ص�켣����
���ǵ�λ�á��ٶȺͼ��ٶȵ������ԣ�������ζ���ʽ��ֵ�õ������ص�켣��
 (7)
(7)
ʽ�У� Ϊ��i����˫�����ڼ�x��y�����Ĺ켣��a0��a1��a2��a3��a4��a5�ֱ�Ϊ����ʽϵ����
Ϊ��i����˫�����ڼ�x��y�����Ĺ켣��a0��a1��a2��a3��a4��a5�ֱ�Ϊ����ʽϵ����
��i���������ڵ�˫����εı߽�����Ϊ
 (8)
(8)
ʽ�У� ��
�� �ֱ�Ϊ��i����˫�����ʼʱ�̺�˫������ֹʱ�̵�x��y������λ�ã�
�ֱ�Ϊ��i����˫�����ʼʱ�̺�˫������ֹʱ�̵�x��y������λ�ã� ��
�� �ֱ�Ϊ��i���ڵ������ڼ�x��y�����ij�ʼλ�ú͵�i-1���ڵ������ڼ�������ֹλ�ã���
�ֱ�Ϊ��i���ڵ������ڼ�x��y�����ij�ʼλ�ú͵�i-1���ڵ������ڼ�������ֹλ�ã��� ��
��
1.2.3 ˫����ε����ĸ߶ȱ仯
��˫����λ����˵����Ĵ�ֱ�˶�����ͨ����ζ���ʽ��ֵ��á����Ĵ�ֱ�˶��켣Ϊ
 (9)
(9)
ʽ�У� Ϊ��i����˫�����ڼ�z�����Ĺ켣��b0�� b1��b2��b3��b4��b5�ֱ�Ϊ����ʽϵ����
Ϊ��i����˫�����ڼ�z�����Ĺ켣��b0�� b1��b2��b3��b4��b5�ֱ�Ϊ����ʽϵ����
�����ڵ������ڼ�����Ĵ�ֱ�����˶�Ϊ0����Zc�dz�������˫����ε����Ĵ�ֱ�˶��ı߽�����Ϊ
 (10)
(10)
ʽ�У� Ϊ��i����˫����ʱ�䣻
Ϊ��i����˫����ʱ�䣻 Ϊ��i���ڵ������ڼ����ľ��Ը߶ȣ�
Ϊ��i���ڵ������ڼ����ľ��Ը߶ȣ�
 (11)
(11)
 Ϊ��i�������㲿֮��Ĵ�ֱ�߶ȱ仯��
Ϊ��i�������㲿֮��Ĵ�ֱ�߶ȱ仯��
1.2.4 �㲿�ؽڹ켣����
Ϊ��������һ����Ч�����ߣ��ڵ������Ӧ�ÿ��ǻ����˰ڶ����ؽڴ�����ת�˶��������㲿�켣���Լ���õ�Ԥ�ڵ��ؽ�λ�ã�����ͨ�����˶�ѧ�����Եõ��Ȳ����ؽڽǶȡ�Ԥ�ڵ��ؽ��˶�����λ�� ��λ��
��λ�� �ϳɵ�[16]��ͼ4��ʾΪ�ڶ��ŵ�����ϵ���ؽڵ�λ�ú�λ�����£�
�ϳɵ�[16]��ͼ4��ʾΪ�ڶ��ŵ�����ϵ���ؽڵ�λ�ú�λ�����£�
 (12)
(12)
 (13)
(13)
���У� Ϊ�������������ϵ�ؽ�λ�ã�
Ϊ�������������ϵ�ؽ�λ�ã� Ϊ�滮��֧���㲿����ԭ������������ϵ�е�λ�ã�
Ϊ�滮��֧���㲿����ԭ������������ϵ�е�λ�ã�  Ϊ�ڶ����ھֲ�����ϵ
Ϊ�ڶ����ھֲ�����ϵ �е�λ��ʸ��(�ֲ�����ϵ��֧������������)��xr-ankΪδ��תǰ�ؽ�֮�������ھֲ�����ϵ����ԭ���λ��������
�е�λ��ʸ��(�ֲ�����ϵ��֧������������)��xr-ankΪδ��תǰ�ؽ�֮�������ھֲ�����ϵ����ԭ���λ�������� Ϊ��ת���ؽ�֮�������ھֲ�����ϵ����ԭ���λ��������
Ϊ��ת���ؽ�֮�������ھֲ�����ϵ����ԭ���λ�������� Ϊ����ھֲ�����ϵ�ڶ��ŵ�λ�˾�������㹫ʽ�μ�����[17]��
Ϊ����ھֲ�����ϵ�ڶ��ŵ�λ�˾�������㹫ʽ�μ�����[17]�� Ϊ�������������ϵ�ڶ��ŵ�λ�˾���Ϊ�ŵ������֮��ĽǶȡ�
Ϊ�������������ϵ�ڶ��ŵ�λ�˾���Ϊ�ŵ������֮��ĽǶȡ�
���ݲ���S�Ķ��壬 �ͦȿ���ͨ����ֵ�㷨��á�Ϊ�˱��ֹյ����״�͵����ԣ����IJ���3��Hermite��ֵ�����ԽǶȹ켣Ϊ������i���ڲ�ֵ�������A(Tdi, ��gi )��B(Tdi + T1i, ��1i +��gi )��C(Tdi +Tsi/2, ��1i-��2i+ ��gi)��D(Ti-T2i, ��2i +��gi+1)��E(Ti, ��gi+1 )����ֵ�㷨����ʹ��MATLAB��ֵ������ʵ�֡�
�ͦȿ���ͨ����ֵ�㷨��á�Ϊ�˱��ֹյ����״�͵����ԣ����IJ���3��Hermite��ֵ�����ԽǶȹ켣Ϊ������i���ڲ�ֵ�������A(Tdi, ��gi )��B(Tdi + T1i, ��1i +��gi )��C(Tdi +Tsi/2, ��1i-��2i+ ��gi)��D(Ti-T2i, ��2i +��gi+1)��E(Ti, ��gi+1 )����ֵ�㷨����ʹ��MATLAB��ֵ������ʵ�֡�

ͼ4 �ڶ��ŵ�����ϵ
Fig. 4 Coordinate system of swing foot
2 ����������
��Ȼ�����IJ�̬�滮�����ܹ�ʹ��������ƽ�����ȶ��IJ��У����������ܵ����治ƽ���Ŷ�ʱ����Ȼ��ʧȥƽ�⣬��ˣ�����Ҫͨ���������ķ�������ʹ������ά��ƽ�⡣ͼ5��ʾΪ˫������˲��п������Ľṹ����ͼ5��֪�������ṹ��Ϊ3�㣺���ϲ㣬˫�����������3-D�������еIJ�̬�滮����Ԥ���������߲�̬���ݣ���2�㣬�������������������ݰ�װ�ڻ����������������ǣ�ʵʱ�������滮�IJ�̬(���Ц�qbΪ�����ǿ��ؽڽǶ�)����֤�����˲��е��ȶ��ԣ���3�㣬˫������˵Ĺؽ��ŷ��������ѷ���������������IJ�̬����u���͵��ؽ��ŷ����������У��Կ��Ƹ��ؽڽ�λ�á�

ͼ5 ˫������˲��п�����������ṹ
Fig. 5 Structure of walking controller of biped robot
2.1 ������̬����
˫������������߹����У�һ���棬ϣ��������������������ֱ��״̬����һ���棬�������������ڲ�ƽ��������ܵ��Ŷ�ʱ�������ᷢ����б�������������ʱ������̬�������˺�����ʧ��ˤ��������������̬����Ч���ֶ��ǿ���֧�����Źؽڣ���Ϊ����ؽ�ֱ��Ӱ���������������̬�����ð�װ�������������ǣ��������˼�����̬����ƫ��ʱ��������̬���Ʊ����Ȼ����ݲ�̬������������IJ��н���������ǰ��֧���ȵ��Źؽڣ���������������ʽ��ʾ��

 (14)
(14)
ʽ�У�KPb��KIb�ֱ�Ϊ�������ı���ϵ���ͻ���ϵ���� Ϊ�ο��Ļ�����������ֱ������ǣ�ʼ��Ϊ0�㣻
Ϊ�ο��Ļ�����������ֱ������ǣ�ʼ��Ϊ0�㣻  Ϊ��̬������ʵ�ʲ�����������ֱ������ǣ�TΪ�������Ѿ����ߵ�ʱ�䡣
Ϊ��̬������ʵ�ʲ�����������ֱ������ǣ�TΪ�������Ѿ����ߵ�ʱ�䡣
2.2 �ؽڽǶȸ��ٿ���
˫������˵Ĺؽ��ŷ��������ѷ���������������IJ�̬���ݷ��͵��ؽ��ŷ��������У��Կ��Ƹ��ؽڽǶȡ���������������ʽ��ʾ��

 (15)
(15)
ʽ�У�KPu��KIu��KDu�ֱ�Ϊ�������ı���ϵ��������ϵ������ϵ���� Ϊ�����˲ο��ؽڽǶȣ�
Ϊ�����˲ο��ؽڽǶȣ� Ϊ�����õ��ĹؽڽǶȣ�
Ϊ�����õ��ĹؽڽǶȣ� ��
�� �ֱ�Ϊ�ο��ͷ����õ��Ĺؽڽ��ٶȡ�
�ֱ�Ϊ�ο��ͷ����õ��Ĺؽڽ��ٶȡ�
3 ������ʵ��
��NAO������Ϊ������з��������飬���Ȳ��������1��ʾ�����������ǰ������Ϊx�ᣬ���Ϊy�ᣬ��ֱ����Ϊz�ᡣ
��1 NAO�������Ȳ�����
Table 1 Parameters of the leg of NAO robot

����ƽ�ز�̬�滮�������������֪��б�ȵ�б�µ���ʱ���������ܹ�ʵʱ���IJ���ģʽ���������λ�˸��ٿ��ƺͽӴ�������[18-19]����ƽ�ز�̬�滮�У�Zg=0 mm��l=15 mm����б�µ����У��ڶ��������ظ߶�l��Ϊ20 mm����i���ڵ��㲿��� ��
�� ���㲿֮��Ĵ�ֱ�߶ȱ仯�ļ��㹫ʽ���£�
���㲿֮��Ĵ�ֱ�߶ȱ仯�ļ��㹫ʽ���£�
 (16)
(16)
 (17)
(17)
 (18)
(18)
����ά��ģ����SOLIDWORKS�н���ƽ�ؼ����Ϊ5���б�µ���ģ�͡�2�ֹ����²�̬�滮�������2��ʾ��
3.1 ADAMS����ʵ��
��ƽ�غ�б�µ���ģ�͵����еϵͳ����ѧ�Զ���������(ADAMS)�У����õ���Ϊľ�ʲ��ϡ�Ϊ�˼��ٽṹԼ������NAO�����˵���֫��Ϊ1�������飬��ͼ6��ʾ��Ȼ������ADAMS�����е�CUBSPL�������滮�õ��IJο��Ƕ����ݽ�����ϡ��ڷ���ʵ���У������˿���ʵ����ƽ����ǰ��-���˺�б�����ȶ����ߡ���2�ֹ����£�����ʵ��õ��Ļ��������Ĺ켣�������ص�켣�Լ�ϥ�ؽ����غ�����������ֱ���ͼ7~8��ʾ�����У�X��Y�ֱ��ʾ��������ϵ��x��y��λ�ơ�
��ͼ7��֪����б�¹����£�����ʵ��õ��������ص�켣��滮�Ĺ켣����һ�£����еIJ��⻬�������ߣ���������X=400 mm�Ժ����˿�ʼ���²��У��������㲿֮���г������б�¹����£���������Ĺ켣��Ϊƽ������滮�켣һ�¡��ʷ���ʵ��Ľ�����š�
��2 2�ֹ����²�̬�滮����
Table 2 Constant gait planning parameters under two conditions


ͼ6 ���������ģ��
Fig. 6 Virtual robot prototype
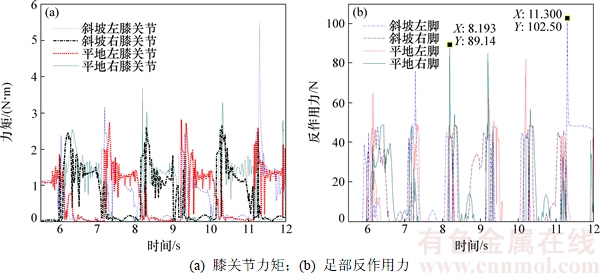
��ͼ8��֪���ڷ���ʵ���У�ϥ�ؽ�������ƽ�ع��������ﵽ3.677 N��m��б�¹������������Ϊ5.515 N��m�����ؽڵ�����������ת��Ϊ8.897 N��m��������Ҫ����ʵ���У��������������50.0 N���ң�����NAO��������������54.8 N��������еķ�ֵ���ֿ�������������Ӵ����������ƽ�ع����£����������Ӵ����ﵽ89.14 N����б�¹����£����������Ӵ����ﵽ102.50 N��
3.2 NAO������ʵ��
�����������NAO������Ϊ��������ʵ�飬NAO������ͼ9��ʾ��ʵ���У�����ľ��ƽ�غ����Ϊ5���б��2�ֵ���ƽ̨��ʵ���л����˿���ʵ���ȶ���ƽ�ز��к�б�²��У��ɼ����Ĺؽڵ�������������������������ͼ10~11��ʾ��

ͼ7 ��������б�¹����µĹ켣�Ա�ͼ
Fig. 7 Trajectory comparison of the robot under condition of slope
ͼ8 ��������2�ֹ����µķ�����
Fig. 8 Simulation results of robot under two conditions
ʵ���У���������ƽ�غ�б��2�ֹ����£���Ӵ����Ϸ�������ƽ�ȣ��������ȷֱ����37.01%��59.94%���Źؽڵ����Ϸ���ؽ����ظ�Ϊƽ�ȣ��������ȷֱ����69.13%��62.75%��˵�����滷���н���֫��Ϊ��Ч������Ի����������ȶ�������Ӱ�죬��ǰ���滮����������ʵ��ƽ�غ�б�µ������ʵ������ʵ�֣�����Ӧ�Խ�ǿ��

ͼ9 NAO����
Fig. 9 NAO prototype
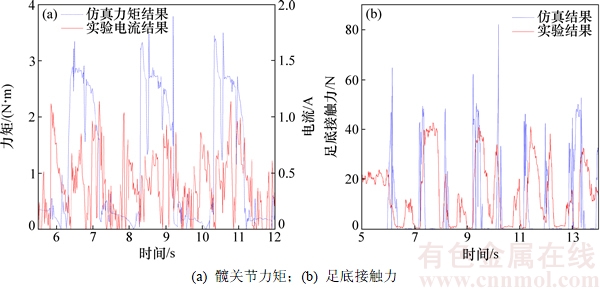
ͼ10 ƽ�ع����²�����������ʵ�����Ա�
Fig. 10 Comparison of simulation and experiment results of parameters under flat ground

ͼ11 б�¹����²��������ʵ�����Ա�
Fig. 11 Comparison of simulation and experiment results of parameters under condition of slope
4 ����
1) ���1�ֻ���3-D�������еIJ�̬�滮������
2) ���ƽ�ع����µ����ࡢ˫����������ص�켣�Լ��㲿�ؽڹ켣�滮��ͨ��������̬�滮����������Ϊ5���б�µIJ�̬�滮��
3) ʵ����NAO���������߽Ϸ���ʵ���и���ƽ�ȣ��ʸù滮�����ǿ��еģ��Ҷ���ʵ�����������Ӧ��ǿ��
�ο����ף�
[1] KAJITA S, MATSUMOTO O, SAIGO M. Real-time 3D walking pattern generation for a biped robot with telescopic legs[C]// Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation. Seoul, South Korea: IEEE. 2001: 2299-2306.
[2] DASGUPTA A, NAKAMURA Y. Making feasible walking motion of humanoid robots from human motion capture data[C]// IEEE International Conference on Robotics and Automation. Detroit, USA: IEEE. 1999:1044-1049.
[3] FUJIMOTO Y, SMADI I A, WAKAYAMA Y. Development of musculoskeletal biped robot driven by direct-drive actuators[C]// 2011 IEEE International Conference on Mechatronics (ICM). Istanbul, Turkey: IEEE. 2011 :821-826.
[4] ��־��, �ڹ���, ����. ���ڽ���ϳɵļ�ZMP ���̵ķ��˻�������ά��̬�滮[J]. �������ѧ, 2010, 37(12): 215-217.
WANG Zhiliang, YU Guochen, XIE Lun. Three-dimensional gait planning for humanoid robots based on decoupling synthesis and ZMP algorithm[J]. Computer Science, 2010, 37(12): 215-217.
[5] HUANG Weiwei, CHEW C M, ZHENG Yu. Pattern generation for bipedal walking on slopes and stairs[C]//8th IEEE-RAS International Conference on Humanoid Robots. Daejeon: IEEE, 2008: 205-210.
[6] ZHOU Changjiu, YUE P K, NI Jun. Dynamically stable gait planning for a humanoid robot to climb sloping surface[C]// IEEE Conference on Robotics, Automation and Mechatronics. Singapore: IEEE, 2004: 341-346.
[7] Nagasue J, Konishi Y, Araki N, et al. Slope-walking of a biped robot with k nearest neighbor method[C]//Fourth International Conference on Innovative Computing, Information and Control (ICICIC). Kaohsiung, Taiwan, China: IEEE, 2010: 173-176.
[8] ALI F, AMRAN A C, KAWAMURA A. Slope-walking of a biped robot with position and orientation based inverse kinematics method[C]//International Conference on Control Automation and Systems (ICCAS). Gyeonggi-do, South Korea: IEEE, 2010: 1724-1728.
[9] ALI F, SHUKOR A Z H, MISKON M F, et al. 3-D biped robot walking along slope with dual length linear inverted pendulum method(DLLIPM)[J]. International Journal of Advanced Robotic Systems, 2013, 11(10): 46-50.
[10] ����. ���˻�����б�����ߵIJ�̬�滮[D]. ����: ����������ѧ����ѧԺ, 2015: 45-46.
ZHANG Wen. A universal pattern generator for humanoid robots walking on slopes[D]. Beijing: Beijing Institute of Technology. School of Mechatronical and Engineering, 2015: 45-46.
[11] ��Z. ���˻�����б�沽��ģʽ�Ľ�ģ��滮[D]. ����: �㽭��ѧ���ƿ�ѧ�빤��ѧԺ, 2012: 34-36.
YANG Jing. Motion modeling and gait planning for humanoid robot walking on slopes[D]. Hangzhou: Zhejiang University. College of Control Science and Engineering, 2012: 34-36.
[12] ��ʢ, �ɻ���, ��ǿ. һ�ַ��˻�����б���˶���̬�滮����[J]. ����������ѧѧ��(��Ȼ��ѧ��), 2010, 38(11): 148-154.
BI Shen, MING Huaqing, CHEN Qiang. A kind of humanoid robot slope gait planning method[J]. Journal of South China University of Technology(Natural Science Edition), 2010, 38(11): 148-154.
[13] �ſ�, �����, ǿ����. С�������������㲽�л�������б���е�Ӧ��[J]. ������, 2000, 22(5): 384-389.
ZHANG Ke, FU Peichen, QIANG Wenyi. Application of wavelet neural network in biped walking robot climbing slope[J]. Robot, 2000, 22(5): 384-389.
[14] ������, Ф����, ����. ˫�㲽�л��������߲�̬������ƫ�����Ʋ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2016, 47(4): 1136-1143.
DING Jiatao, XIAO Xiaohui, WANG Yang. Strategy for biped gait robot online generation and yaw control[J]. Journal of Central South University(Science and Technology), 2016, 47(4): 1136-1143.
[15] SANTACRUZ C., NAKAMURA Y. Walking motion generation of humanoid robots: Connection of orbital energy trajectories via minimal energy control [C]//11th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Bled, Slovenia: IEEE, 2011: 695-700.
[16] Kajita S, Hirukawa H, Harada K. Introduction to humanoid robotics [M]. Berlin, Germany: Springer, 2005: 120-130.
[17] NIKU S. B. Introduction to robotics: analysis, systems, applications [M]. New Jersey: Prentice Hall, 2001: 50-500
[18] HONG Y D, LEE B J, KIM J H. Command state-based modifiable walking pattern generation on an inclined plane in pitch and roll directions for humanoid robots[J]. IEEE/ASME Transactions on Mechatronics, IEEE, 2011, 16(4): 783-789.
[19] MORISAWA M, KANEHIRO F, KANEKO K, et al. Reactive biped walking control for a collision of a swinging foot on uneven terrain[C]//11th IEEE-RAS International Conference on Humanoid Robots (Humanoids). Bled, Slovenia: IEEE, 2011: 768-773.
(�༭ �����)
�ո����ڣ�2017-04-15�������ڣ�2017-05-29
������Ŀ(Foundation item)��������Ȼ��ѧ����������Ŀ(51675385��51175383)(Projects(51675385, 51175383) supported by the National Natural Foundation of China)
ͨ�����ߣ�Ф���ͣ���ʿ�����ڣ���ʿ����ʦ�������ƶ�������ѧ�������������о���E-mail��xhxiao@whu.edu.cn

