����ʱ��ͼ�滮�Ľ�ͨ�źſ��Ʒ���
���绪��������Ȩ����»
(����ʦ����ѧ �������ѧ����Ϣ����ѧԺ������ ������130117)
ժҪ�������ܹ滮�е�ʱ��ͼ�滮������չ�о���ʹ���ܴ�������ִ���ڼ䶯��Ч��ʵʱ�仯�����⣬������Ӧ�õ���ʱ��������صĽ�ͨ�źſ�������ʹ��PDDL���Զ��źŵ�ϵͳ��ģ��Ȼ������TGP�滮��������⣬������Ľ����GLD����ϵͳ�н���ģ�Ⲣ�������㷨���жԱȡ�������֤�������ģ�ͺ��㷨����Ч�ԡ�
�ؼ��ʣ�ʱ��ͼ�滮��PDDL���ԣ������źŵƣ�GLD����ϵͳ
��ͼ����ţ�U491 ���ױ�־�룺A ���±�ţ�1672-7207(2011)S1-1048-05
Traffic light control based on temporal graph planning
LIU Shu-hua, CHENG Yu, LI Gao-quan, YIN Lu
(School of Computer Science and Information Technology, Northeast Normal University, Changchun 130117)
Abstract: Temporal graph planning (TGP) was extended and invited to deal with the real-time change of action effects during action executing, and then it was applied to intelligent traffic light system. The traffic light model was established in PDDL, and then the planning result based on the model was resolved by TGP. The planning result was simulated to control traffic lights in GLD simulation system and compared with other algorithms. The simulation results prove the efficiency of the model and algorithm.
Key words: temporal graph planning; PDDL; intelligent traffic light; GLD simulation system
��ͨ�����ǵ�����ϢϢ��أ��Թ��õķ�չҲ���зdz���Ҫ�����á�Ȼ�������ž��õ�Ѹ�ٷ� չ��˽�ҳ�����Ѹ�����������³��н�ͨ������ӵ�����������������أ�Խ��Խ�������ǵ����ӡ����н�ͨ���ɴ�����·�ͽ������ɵ���״�ṹ���������ڽ�����ϵĽ�ͨ���ǽ����ͬ����ͨ����ͻ����Ҫ�ֶ�֮һ����ˣ��Խ�ͨ�źŽ�����Ч�Ŀ�����ʮ�ֱ�Ҫ�ġ�������Ҵ�20����60�����ʼ�������ܽ�ͨ������о�����ȡ���˲����м�ֵ�ijɹ�[1-2]�������ϱȽϵ��͵ij��н�ͨ�źſ���ϵͳ����Ӣ����TRANSYTϵͳ��SCOOTϵͳ���Ĵ����ǵ�SCATSϵͳ�Լ�������RHODESϵͳ�ȡ��ҹ���20����70���ĩ���Ѿ���ʼ�ڽ�ͨ���������Ӧ�õ�����Ϣ�������ڴ˺��20�������������֧���������������Ļ����ϣ�ͨ���㷺�Ĺ��ʽ������������ITS��������˳����������о�����Ʒ������ʾ��Ӧ�ã���ȡ����һ���ijɹ������д����Ե�ϵͳ������ͨHT-UTCSϵͳ���Ϻ�SUATSϵͳ�ȡ����Ƚ������ܿ��Ƽ�������Ϣ�ںϼ�����������Ϣ���������뽻ͨ���̽������������Ϊһ��ո�µ��о�����[3]��
���źſ��Ʋ������Ż��ǽ�ͨ�źſ����о��ĺ������ݣ������˹����ܼ����ķ�չ��һЩ�˹����ܵķ�����Ӧ�õ���ͨ�źſ����������Ŵ��㷨[4]��ǿ��ѧϰ[5]���������弼��[6]��ģ����������[7]�������缼��[8]�ȡ������������ܹ滮�������˹����������е���һ���о��ȵ㣬�봫ͳ�Ĺ滮��ȣ����Ĺ滮�ٶȿ죬��ˣ������������ˡ����պ��졢�˻������������ھ���������õ��˹㷺��Ӧ�á�������ʵ������������ⶼ��ʱ�����Դ�������е���ϵ�������ڴ�ͳ�滮˼��Ļ����ϣ��ֵ�����ʱ��滮(Temporal Planning)[9]]����ֵ�滮(Metric Planning)[10]��ʹ�����ܹ滮�ܸ��õ������������ʵ�е����⡣
1 ������
��ͨ�ź�����Э�������и�������ڵĽ�ͨ����ͼ1��ʾ�����������ϡ�������4������ÿ��������������С�ֱ�к�����3������������������Ҫ�о����������ڰ����ཻ��ڡ����źŵƵ��������ͼ2��ʾ��
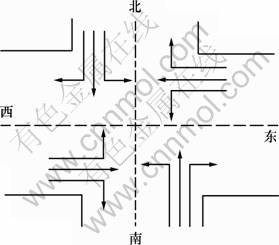
ͼ1 ������ڽ�ͨ���ֲ�
Fig.1 Traffic flow of intersection

ͼ2 �ཻ�������ͨ����
Fig.2 Traffic flow of multi intersections
���źŵƵĿ��Ʒ�Ϊ��ء��߿غ���ء���غ��߿����кܶ��Ϊ������㷨�������Ѷȼ����㸴�Ӷȶ��ϵ͡���֮��ȣ���صļ��㸴�ӶȻ����Ž������Ŀ�������Ѹ�����ӣ����⣬��ͬ�����źŵ�֮��Ļ����ϵҲʹ�ÿ����㷨���ѶȼӴ�
����ͼ�滮���ٶȿ죬��ʱ��ͼ�滮���ʺϴ����źŵƵij����Զ���������������ڲ�����λ֮���Լ������֮��ij�ͻ��ϵ����ˣ���������ʱ��ͼ�滮�����ۺͷ���ʵ�ֽ�ͨ�źŵ�����Э�����ơ����ȸ���ʱ��ͼ�滮��������������ͨ�źſ���ϵͳ���н�ģ��Ȼ�����źŵƷ���ϵͳGLDģ�⽻ͨ�����������������㷨��GLD�����н��в��ԣ����Է��������жԱȷ�����
2 ϵͳ��ģ
����ʱ��ͼ�滮��ͨ�źŵƵ����Ž⣬����Ҫ���źŵ�ϵͳ���н�ģ�����ɽ�ͨ�ź�����Э�������㷨��Ԫ�ذ��������(Intersection)����ͨ�źŵ�(Traffic Light)��ָ��ڷ���ij���(Lane)�����IJ��ù滮������������(PDDL, Planning domain definition languag)2.1��Խ�ͨ�źŵ�����Э�����ƽ��н�ģ��
2.1 ��������
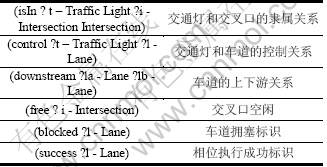
��1����2�ͱ�3�ֱ��г���ͨ�źŵ�ʱ��滮ģ���������ν�ʡ���������ֵ��Դ��
��1 ν���б�
Table 1 Predication list
��2 �����б�
Table 2 Action list

��3 ��ֵ��Դ
Table 3 Numeric variable

2.2 ����ģ�͵�����
��������ν�ʺ���ֵ����������PDDL���ԶԽ�ͨ�źŵƵĽ�ģ���£�
(define (domain Traffic_Control)
(: requirements :typing :fluents :durative-actions :duration-inequalities)
(: types
Intersection - object
TrafficLight - object
Lane��object
(: predicates
(isIn ?t - TrafficLight ?i - Intersection)
(control ?t - TrafficLight ?l - Lane)
(downstream ?la - Lane ?lb - Lane)
(free ?i - Intersection)
(success ?l - Lane)
)
(: functions
(length ?l - Lane)
(queue_length ?l - Lane)
(underway_num ?l - Lane)
(remain_time ?t - TrafficLight)
)
(: durative-action TURN_GREEN
:parameters (?i - Intersection ?t -
TrafficLight ?l_upstream - Lane ?l_downstream - Lane)
:duration (= ?duration 10)
:condition
(and
(at start (isIn ?t ?i))
(at start (control ?t ?l_upstream))
(at start (downstream ?l_upstream ?l_downstream))
(at start (free ?i))
(at end (< (queue_length ?l_upstream) 8))
)
:effect
(and
(at start (not (free ?i)))
(at start (increase (underway_num ?l_downstream) (queue_length ?l_upstream)))
(at end (free ?i))
(at end (success ?l_upstream))
)
)
(: durative-action underway
:parameters (?l - Lane)
:duration (= ?duration (length ?l))
:condition
(and
(at start (> (underway_num ?l) 0))
)
:effect
(and
(at end (increase (queue_length ?l) (underway_num ?l)))
)
)
); end define domain
������������Ϊdomain.pddl�ļ�����ʱ��滮�����е��á�
2.3 ��ͼ��Ϣ������
��ͼ�ɽ���ں͵�·��ɣ�ÿ��������ɶ����ͬ������źŵ���ɡ�ͼ2��ʾ�ĵ�ͼ��PDDL���������IJ�����Ϣ���£�
(define (problem two_intersections)
(: domain Traffic_Control)
(: objects
i1 i2 i3 i4 �C Intersection
t1 t2 t3 t4 t5 t6 t7 t8 t9 t10 t11 t12 t13 t14 t15 t16 t17 t18 t19 t20 - TrafficLight
l1 l2 l3 l4 l5 l6 l7 l8 l9 l10 l11 l12 l13 l14 l15 l16 l17 l18 l19 l20 l21 l22 l23 l24 - Lane
)
(: init
(isIn t15 i1)
(isIn t16 i1)
��
(control t15 l5)
(control t16 l6)
��
(downstream l5 l19)
(downstream l6 l19)
��
(free i1)
(free i2)
��
(= (queue_length l1) 0)
(= (queue_length l2) 0)
��
(= (underway_num l1) 10)
(= (underway_num l2) 10)
��
(= (length l1) 10)
(= (length l2) 10)
��
)
(: goal
(and
(success l7)
(success l8)
��
)
)
3 ����ʱ��ͼ�滮�Ľ�ͨ�źſ���
����
��������ϵͳģ�ͣ�ʱ��滮���ܹ滮����Щ��ͨ�Ʊ����Լ��̵Ƴ�����ʱ�䣬��һ���滮���ڵĿ�ʼ����һ������̵��̵ƽ���ʱ��Ϊ����������Ϊӵ���ĵ�·����һ�滮���ڻ����̵�ͨ��Ȩ��������ֿ��Ʋ����Ǻ����ġ�
4 ϵͳ����
Ϊ��������㷨�Ŀ������Լ��㷨�����ܣ��ڽ�ͨ�źŵƷ���ƽ̨GLD�Ͻ���ģ����ԡ�
4.1 ���滷������
GLD����ƽ̨��ͼ3��ʾ���÷���ϵͳ������ͼ�༭��������ģ����2���֣���ͼ�༭�����������µ�ͼ����ԭ�е�ͼ������ģ��������ģ��ʵ�ʵĽ�ͨ�����������ƽ̨�ṩ��һЩ��ͨ�źſ����㷨�������������ɽ�����Ŵ��㷨��ǿ��ѧϰ�㷨�ȡ���˲��ø�ƽ̨��������֤������㷨�Ƿ���У��������ױȽϲ�ͬ�㷨�����ܡ�

ͼ3 GLD����ƽ̨
Fig.3 GLD simulation platform
����ϵͳ�ĺ�̨��ʱ��滮��CRIKEY��������ͼ��Ϣ�ͽ�ͨģ�ͺ�CRIKEY�Ϳ��Թ滮����Щ��ͨ�Ʊ����Լ��̵Ƴ�����ʱ�䡣
4.2 �����㷨��ʵ��
GLD����ϵͳ��滮��CRIKEY֮��Ҫ���ഫ�ݶԷ������������ʵ��ϵͳ�����ӡ��滮��CRIKEY��GLDƽ̨�л�õ�ǰ���������ij��ȡ������ȴ����еij����Լ������źŵƵ�״̬��Ȼ�������Щ���ݹ滮����һ���źŵ����ڣ���Щ�źŵƱ����Լ��̵Ƴ�����ʱ�䡣��Щ�滮������ڿ���GLD�еĽ�ͨ�ƣ��Ӷ�ʵ�ֶԳ������Ŀ��ƣ��������������ͼ4��ʾ��

ͼ4 ��ͨ�ƿ����㷨����ͼ
Fig.4 Flow chart of traffic light control
4.3 ������
Ϊ��֤���㷨�����ܣ������������㷨���жԱȣ���new control��������������㷨��ѡ��ϵͳ�е�2���ϵ����㷨random��red light district�㷨���жԱȣ������ͼ5��ʾ����ͼ5���Կ�����ϵͳ�ڵ�����ͬ�û�����ǰ���£����㷨��ƽ���ȴ�ʱ����red light district�㷨��࣬����ԶԶС��random�㷨�ĵȴ�ʱ�䣬֤���˸��㷨����Ч�Ժ�ʵ���ԡ�

ͼ5 �û�����ƽ���ȴ�ʱ���ϵ
Fig.5 Relation of users and waiting time
5 ������չ��
(1) �����ܹ滮�е�ʱ��ͼ�滮������չ�о���ʹ���ܴ�������ִ���ڼ䶯��Ч��ʵʱ�仯�����⡣
(2) ��ʱ��ͼ�滮Ӧ�õ���ʱ��������صĽ�ͨ�źŵƿ�������ʵ������ʵʱ�滮������ƽ�ͨ�źŵ�Ŀ�ġ�
(3) δ���д���������������һ���Ż�ϵͳģ�ͺͽ���֧�ֶ���ִ���ڼ䶯��Ч�������ɱ�Ĺ滮����
�ο����ף�
[1] French R L. A comparison of IVHS progress in the United tates, Japan and Europe through 1993[R]. Washington D C: IVHS America, 1994: 525-530.
[2] French R L. A decade of global progress in intelligent transportation[C]// Proceedings of the 2nd World Congress on ITS. Yokohama, Japan: VERTIS, 1995: 1254-1259.
[3] ����ƽ, �ⳬ��. ��������ϵͳ��ԭ��. ������Ӧ��[M]. �人: �人������ѧ������, 2006: 9-11.
YAN Xin-ping, WU Chao-zhong. Intelligent transportation systems��principles, methods and applications[M]. Wuhan: Wuhan University of Technology Press, 2006: 9-11.
[4] FOY M D, Benekohal R F, Goldberg D E. Signal timing determination using genetic algorithms. Transportation research[R]. Washington D C: National Research Council, 1992.
[5] ABDULHAI B, Pringle R, Karakoulas G J. Reinforcement learning for true adaptive traffic signal control[J]. ASCE Journal of Transportation Engineering, 2003, 129(3): 278-285.
[6] Burmeister B, Haddadi A, Matylis G. Application of multi-agent systems in traffic and transportation[C]// Software Engineering, IEEE Proceedings. 1997, 144(1): 51-60.
[7] Pappis C P, Mamdani E H. A fuzzy logic controller for a traffic junction[J] IEEE Transactions on Systems, Man, and Cybernetics, 1977(7): 707-717.
[8] LIU Zhi-yong, LI Shui-you. Artificial neural networks self-tuning predictive control for traffic signals[J]. Control Theory & Applications, 2003, 20(6): 933-937.
[9] Smith D, Weld D. Temporal planning with mutual exclusion reasoning[C]// Proc. of the 1999 International Joint Conference on Artificial Intelligence. San Francisco, US: Kaufmann Publishers Inc, 1999: 791-798.
[10] Jana Koehler. Planning under resource constraints[C]//European Conference on Artificial Intelligence, Brighton, UK: Wiley, 1998: 489-493.
(�༭ ������)
�ո����ڣ�2011-04-15�������ڣ�2011-06-15
������Ŀ������ʡ�Ƽ������´��ص���Ŀ(20100305)
ͨ�����ߣ����绪(1970-)��Ů�����ɹų�����ˣ���ʿ�������ڣ��������ܽ�ͨ���ƶ������˵��о���Tel: 0431-84536338; E-mail: liush129@nenu.edu.cn

