DOI:10.19476/j.ysxb.1004.0609.2019.02.16
电压特性对压电纤维复合物驱动性能的影响
袁 晰1,王晓宇2,王浩威2,陈海燕1,林秀娟1,闫明洋1,张少峰1,周科朝1,张 斗1
(1. 中南大学 粉末冶金国家重点实验室,长沙 410083;
2. 北京空间飞行器总体设计部,北京 100094)
摘 要:压电纤维复合物因机电响应速度快、驱动能力强和柔性佳成为智能材料领域的研究热点之一。压电纤维复合物作为驱动器时,在不同的应用领域对于驱动电压特性有不同的要求。本文通过自由应变和悬臂梁顶端位移研究压电纤维复合物在不同电压幅值、偏置、波形下的驱动应变性能。结果表明:随着驱动电压幅值增大,压电纤维复合物自由应变值和驱动性能随之增大。压电纤维复合物的横向和纵向自由应变分别随着电压偏置的增大而降低,相应的悬臂梁顶端位移量减小。当用方波驱动时压电纤维复合物的纵向自由应变值和横向自由应变值分别为2061.4×10-6和574.9×10-6,顶端位移量为1.614 mm,比正弦波和锯齿波的驱动值更大,其原因主要是电压的阶跃性导致瞬间施加在压电纤维上的电场强度较大。
关键词:压电纤维复合物;电压特性;电压波形;驱动性能
文章编号:1004-0609(2019)-02-0343-07 中图分类号:TB332 文献标志码:A
压电材料,由于其具有机电响应速度快、刚度高、驱动力大等特点[1],是应用最为广泛的一类智能材料。然而压电陶瓷自身固有的脆性及难以实现大变形的特点限制了其应用[2]。美国宇航局于2000年首次提出压电纤维复合物(Macro-fiber composites,MFC)的概念[3],该材料由交叉指形电极、聚合物基体以及包封于基体当中的方形压电陶瓷纤维组成三明治结构复合物,由于树脂基体的引入使得压电纤维复合物具有刚度大、驱动能量密度高且变形量大的特性,能粘贴于各种复杂或弯曲的结构表面,可应用于振动控制、结构健康监测、能量采集、微操作以及变形翼控制等领域[4-21]。
在上述应用领域,使用压电纤维复合物作为驱动器时,可通过控制驱动电压特性,获得相应的结构形变响应。因此,研究驱动电压的特性如何影响压电纤维复合物驱动性能,具有重要的意义。尽管已有许多针对压电材料驱动性能的研究,但这些研究多集中于对称驱动电压或单一正弦波形电压。朱松等[22]研究了不同驱动电压、偏置及频率下,压电纤维复合物对不同基板材质(铝板和麦拉膜)悬臂梁结构驱动性能的影响,利用悬臂梁顶端位移的变化量对压电纤维复合物驱动性能进行评价,并以此计算出压电纤维复合物的驱动力。YANG等[11]将压电纤维复合物粘贴在悬臂梁上,搭建了振动能量采集系统,分别通过实验研究和有限元模拟,通过控制电压波形实现更佳的能量采集效果。陈西平等[23]利用压电元件的急速变形带动惯性冲击体(通常由压电元件和惯性块组成)产生惯性冲击力,通过克服机构本身的摩擦力形成连续大范围的运动。驱动电压波形对机构的运动步长有着重要影响,其中压电元件急速变形阶段和急速变形终了阶段对机构运动步长有重要影响。
本文作者系统地研究了驱动电压幅值、偏置电压以及各种电压波形对压电纤维复合物自由应变和悬臂梁结构驱动性能的影响,为压电纤维复合物在各个领域的应用提供了研究基础。
1 实验
1.1 压电纤维复合物驱动性能测试方案
本文中所使用的压电纤维复合物,其制备工艺按照文献[24]中报道的方法,其中压电纤维所用的材料为PZT-51,环氧树脂为美国Araldite2020,将获得的压电纤维-树脂复合层用镀有叉指状铜电极的聚酰亚胺膜进行封装并极化。压电纤维-树脂复合层的有效面积为 27 mm×10 mm。由于PZT压电陶瓷在极化后同时具有d33和d31效应[2],通过叉指状电极对复合物施加交变电压以后,在沿陶瓷纤维长度方向(纵向)和垂直于长度的方向(横向)分别有拉伸、收缩型应变产生,因此通过在表面粘贴应变片的方式测试压电纤维复合物的纵向、横向自由应变。图1所示为表面粘贴有应变片的压电纤维复合物样品。
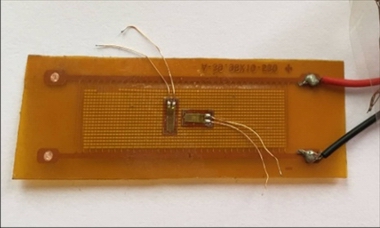
图1 压电纤维复合物样品图
Fig. 1 Schematic diagram of piezoelectric fiber composites
本文作者自行搭建平台测试压电纤维复合物的自由应变,测试原理如图2所示。通过控制计算机编程输出一个电压信号,通过NI-labview数据采集卡转换为电流信号被高压放大器(Smart; HVA 1500/50)接收并放大,再由高压放大器施加于压电纤维复合物上。在样品的中央位置粘贴互相垂直的应变片,长度方向平行或垂直于压电纤维长度方向,通过其感应到的拉伸或收缩分别采集高压驱动下压电纤维复合物的纵向自由应变和横向自由应变,通过动态应变仪(西格玛ASMC2-2)采集该自由应变并在计算机屏幕上显示。通过自由应变值可计算出压电纤维复合物的d33值,计算公式如式(1)所示,其中,E为施加电压大小。
d33=longitudinal free strain×106/E (pm/V) (1)
测试驱动性能时,将压电纤维复合物粘贴于铝板悬臂梁的底端,并将之固定于测试平台座上,激光斑点定位于铝板的顶端中心位置。驱动性能的测试平台如图3所示。通过信号发生器产生一个激励电压,经高压放大器作用后施加于压电纤维复合物,并驱动铝板产生振动,通过激光位移传感器(Micro-Epsilon Messtechnik GmbH)采集顶端位移,并通过NI-labview数据采集卡对位移信号与电信号进行匹配处理,得到电压与顶端位移的关系。
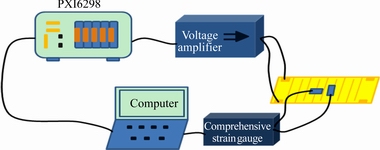
图2 自由应变测试原理图
Fig. 2 Schematic diagram of free strain testing
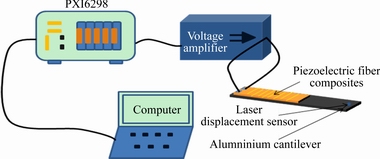
图3 驱动测试平台
Fig. 3 Testing platform of driving actuation
1.2 实验研究方案
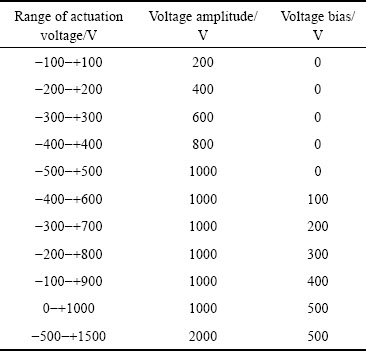
本研究的测试频率为0.1 Hz,测试信号分别采用对称电压和偏置电压,电压方向与极化方向相同。并分别选用正弦波、方波和三角波在偏置电压驱动下进行测试,考虑到过大的负电压将导致压电纤维复合物中的电畴发生反转,因此,控制驱动时的负电压取值范围在-500 V 以内,实验中所用到的驱动电压幅值和偏置电压如表1所列。
表1 选定的驱动电压范围对应的幅值和偏置电压
Table 1 Actuation voltage with different amplitude and voltage bias
2 结果与讨论
2.1 电压幅值对驱动性能的影响
图4(a)和(b)所示为电压频率为0.1 Hz、对称交流电压下,电压幅值对压电纤维复合物的自由应变值和顶端位移量的影响。由图4(a)图可知,自由应变随电压呈线性增大的趋势,当电压幅值分别为200 V和 500 V时,压电纤维复合物的纵向自由应变分别为164.8×10-6和529.8×10-6,横向自由应变分别为67.6×10-6和234.3×10-6。经线性拟合,可得出自由应变与电压幅值之间的关系式,εl=1.152U-59.12,εt=0.5269U-32.43。(其中ε l为纵向自由应变,εt为横向自由应变,U为电压幅值)。由图4(b)可知,压电纤维复合物粘贴于铝板悬臂梁的顶端位移量随着电压幅值增大而增大,当电压幅值分别为200 V和500 V时,其顶端位移值分别为0.109 mm和0.276 mm。由于PZT作为压电材料,电畴将在外加电场的作用下发生偏转,随着驱动电压幅值增大,施加于压电纤维上的电场强度增大,从而晶体内部的电畴偏转角度越大,有利于压电纤维复合物的驱动变形,自由应变值和顶端位移量会有所增大[25]。
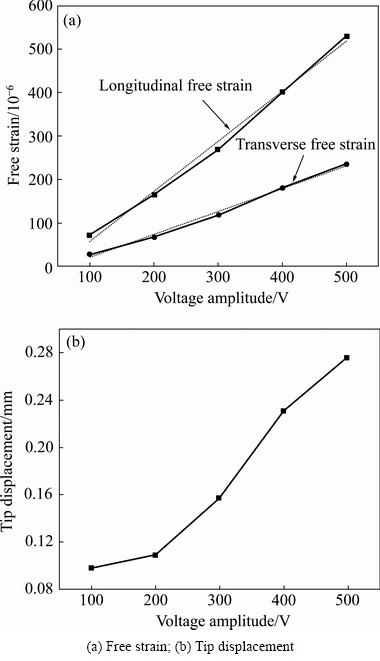
图4 电压幅值对压电纤维复合物的性能影响
Fig. 4 Influence of voltage amplitude on properties of PFCs
2.2 偏置电压对驱动性能的影响
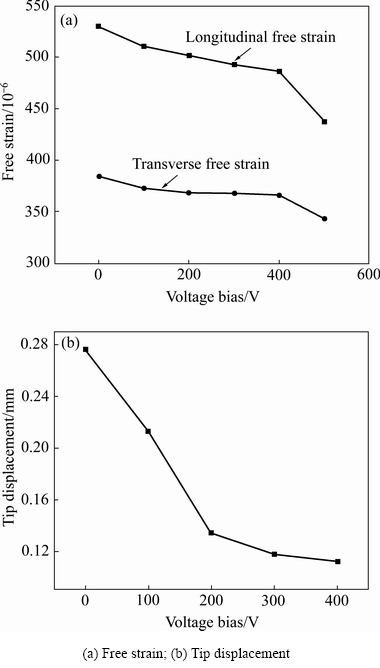
图5 电压偏置幅值对压电纤维复合物性能影响
Fig. 5 Influence of voltage bias on properties of PFCs
图5(a)和(b)所示分别为电压频率为0.1 Hz、电压幅值为500 V时,电压偏置对压电纤维复合物的自由应变值与顶端位移量的影响。由图5(a)可知,自由应变随着电压偏置的增大而降低,如电压偏置分别为0 V和200 V时,压电纤维复合物的纵向自由应变分别为529.8×10-6和501.3×10-6,横向自由应变值分别为384×10-6和368×10-6,明显降低。由图5(b)可知,电压偏置的幅值越大,驱动悬臂梁顶端位移量越小,如电压偏置分别为0 V和200 V时,其粘贴于铝板悬臂梁的顶端位移量分别为0.276 mm和0.134 mm。当压电陶瓷处于偏置电压环境当中,其内部电畴会受到钉扎作用,偏置电压越大,非180°畴更难以发生偏转,导致同向电畴减小,从而压电纤维复合物的自由应变值和顶端位移量下降[26]。
2.3 电压波形对驱动性能的影响
2.3.1 锯齿波
图6所示为电压范围为-500 V~+1500 V、电场频率为0.1 Hz时,压电纤维复合物在正弦波作用下的自由应变值和悬臂梁结构的顶端位移量。图6(a)所示为时间-电压关系图,表明锯齿波形如锯齿,正电压向负电压转变具有突变性,负电压向正电压转变具有连续性。图6(b)和(d)所示为该电压下的自由应变行为,具有各向异性,在每个10 s的周期中,正向应变向负向转变具有跳跃性,其纵向自由应变和横向自由应变分别为1897.8×10-6和428.1×10-6,较正弦波下的自由应变值大。图6(c)所示为该电压下悬臂梁结构的顶端位移量,在其电压从正变向负时,顶端位移会有一个锯齿状的过渡区,且锯齿程度越来越小,接着缓慢连续变化,其顶端位移值为1.393 mm。
2.3.2 方波
图7所示为电压范围为-500 V~+1500 V、电场频率为0.1 Hz时,压电纤维复合物的自由应变性能和悬臂梁顶端位移量的表征。图7(a)显示方波具有阶跃性,整个范围内只有-500 V和1500 V两个电压值。从图7(b)和(d)可看出,压电纤维复合物的自由应变及悬臂梁结构的顶端位移与正弦波及锯齿波状态下的行为不同,其数值并没有表现出跳跃变化,而是存在一定的过渡区。这是因为,当电压在正负方向转变时,压电陶瓷内部电畴跟不上外电场的变化发生反转而存在滞后效果,每个周期内均有一个自由应变缓慢变化的区域。图7(c)所示为铝板悬臂梁结构的顶端位移量,与自由应变相似,表现出迟滞行为,中间的稀疏点即为过渡区的顶端位移值。在方波驱动下,压电纤维复合物的纵向自由应变和横向自由应变为2061.4×10-6和574.9×10-6,顶端位移量为1.614 mm,较正弦波下的值大,而其迟滞更加明显,表现为滞回面积更大。根据均匀场理论假设[27],在压电纤维复合物中,复合物在纤维长度方向的平均应变与聚合物基体和压电纤维在纤维长度方向的应变相同。又根据压电方程[2] d33=S3/E3,其中d33为压电应变常数,S3为自由应变,E3为电场强度。由于方波的电压变化具有瞬时性,瞬间施加于压电纤维复合物的电场强度会比较集中且数值较大,此时复合物的自由应变和悬臂梁顶端位移产生峰值(见图7(b)和(d)),更容易对压电纤维复合物造成损伤。
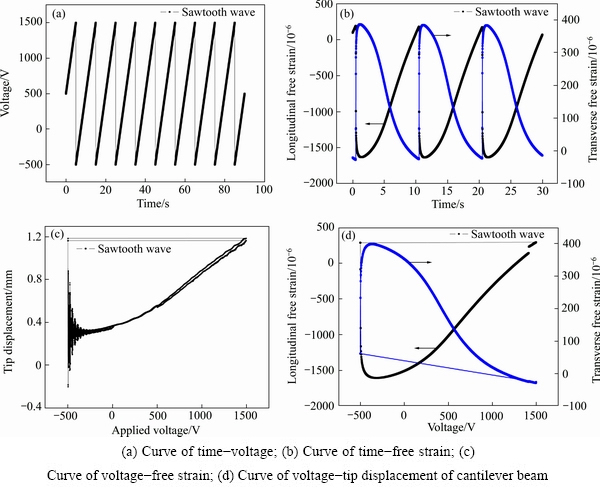
图6 压电纤维复合物在锯齿波下的驱动性能
Fig. 6 Actuation performance of PFCs under sawtooth wave voltage
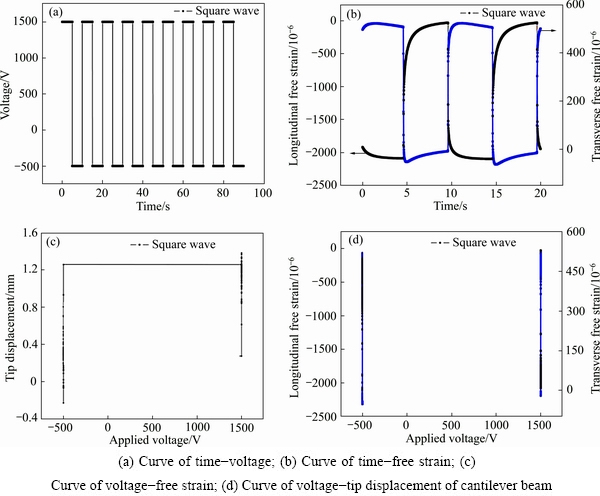
图7 压电纤维复合物在方波下的驱动性能
Fig. 7 Actuation performances of PFCs under square wave voltage
3 结论
1) 通过自由应变和悬臂梁顶端位移获得了压电纤维复合物在不同电压幅值下的驱动性能。随着驱动电压幅值增大,施加于压电纤维上的电场强度增大,从而晶体内部的电畴偏转角度越大,有利于压电纤维复合物的驱动变形,自由应变值和顶端位移量随之增大。
2) 获得了电压偏置对压电纤维复合物的自由应变值与顶端位移量的影响。压电纤维复合物的横向和纵向自由应变均随着电压偏置的增大而降低,相应的悬臂梁的顶端位移量减小。
3) 比较了不同波形的驱动电压对压电纤维复合物性能的影响。在锯齿波、方波的驱动下,压电纤维复合物的自由应变均表现出各向异性,铝板悬臂梁结构的顶端位移均有迟滞特性。方波驱动时其纵向自由应变值和横向自由应变值分别为2061.4×10-6和574.9×10-6,顶端位移量为1.614 mm,比正弦波和锯齿波驱动值更大,主要由于电压的阶跃性导致瞬间施加在压电纤维上的电场强度较大。
REFERENCES
[1] 沈 星, 冯 伟, 李 仁. 具有大驱动位移的复合结构型PZT压电陶瓷[J]. 复合材料学报, 2005, 22(6): 44-48.
SHEN Xing, FENG Wei, LI Ren. Large-displacement PZT piezoelectrics with composite structure[J]. Acta Materiae Compositae Sinica, 2005, 22(6): 44-48.
[2] BENT A A. Active fiber composites for structural actuation[D]. Massachusetts: Massachusetts Institute of Technology, 1997.
[3] LIN Xiou-juan, ZHOU Ke-chao, ZHANG Xiao-yong, ZHANG Dou. Development, modeling and application of piezoelectric fiber composites[J]. Transactions of Nonferrous Metals Society of China, 2013, 23(1): 98-107.
[4] DEBIASI M T. Deformation of the upper and lower surfaces of an airfoil by macro fiber composite actuators[J]. Journal of Solid State Chemistry, 2013, 161(2): 416-423.
[5] KIM H S, SOHN J W, CHOI S B. Vibration control of a cylindrical shell structure using macro fiber composite actuators[J]. Mechanics Based Design of Structures and Machines, 2011, 39(4): 491-506.
[6] RAJA S, IKEDA T, DWARAKANATHAN D. Deflection and vibration control of laminated plates using extension and shear actuated fiber composites[J]. Smart Materials Research, 2011, 2011(2/3): 686-691.
[7] SOJH J W, CHOI S B, KIM H S. Vibration control of smart hull structure with optimally placed piezoelectric composite actuators[J]. International Journal of Mechanical Sciences, 2011, 53(8): 647-659.
[8] TARAZAGA P A, INMAN D J, WILKIE W K. Control of a space rigidizable inflatable boom using macro-fiber composite actuators[J]. Journal of Vibration and Control, 2007, 13(7): 935-950.
[9] SODANO H A, INMAN D J, PARK G. Comparison of piezoelectric energy harvesting devices for recharging batteries[J]. Journal of Intelligent Materials Systems and Structures, 2005, 16(10): 799-807.
[10] SODANO H A, LLOYD J, INMAN D J. An experimental comparison between several active composite actuators for power generation[J]. Smart Materials and Structures, 2006, 15(5): 1211-1216.
[11] YANG Y W, TANG L H, LI H Y. Vibration energy harvesting using macro-fiber composites[J]. Smart Materials and Structures, 2009, 18(11): 1-8.
[12] SONG H J, CHOI Y T, WERELEY N M, PUREKAR A S. Energy harvesting devices using macro-fiber composite materials[J]. Journal of Intelligent Materials Systems and Structures, 2010, 21(6): 647-658.
[13] TUNGPIMOLRUT K, HATTI N, PHONTIP J, KOMOLJINDAKUL K, PECHRACH K, MANOOONPONG P. Design of energy harvester circuit for a MFC piezoelectric based on electrical circuit modeling[C]//IEEE International Symposium on Applications of Ferroelectrics. Piscataway: IEEE, 2011: 1-4.
[14] PARK S, INMAN D J, YUN C B. An outlier analysis of MFC-based impedance sensing data for wireless structural health monitoring of railroad tracks[J]. Engineering Structures, 2008, 30(10): 2792-2799.
[15] CUI Lin, LIU Yu, SOH C K. Health monitoring of cylindrical structures using torsional wave generated by piezoelectric macro-fiber composite[C]//Proceedings of SPIE, Health Monitoring of Structural and Biological Systems 2011. 2011, 7984: 79840G-1-9. https://doi.org/10.1117/12.880333.
[16] TARAZAGA P A, PEAIRS D M, WILKIE W K, INMAN D J. Structural health monitoring of an inflatable boom subjected to simulated micrometeoroid/orbital debris damage[C]//Proceedings of SPIE, Nondestructive Evaluation and Health Monitoring of Aerospace Materials, Composites, and Civil Infrastructure. 2006, 6176: 61760N-1-9. https://doi.org/10.1117/12.658717.
[17] JHA A K, KUDVA J N. Morphing aircraft concepts, classifications, and challenges[C]//Proceedings of SPIE, Smart Structures and Materials 2004: Industrial and Commercial Applications of Smart Structures Technologies. 2004, 5388: 213-224. https://doi.org/10.1117/12.544212.
[18] KIM D K, HAN J H. Smart flapping wing using macro-fiber composite actuators[C]//Proceedings of SPIE, Smart Structures and Materials 2006: Smart Structures and Integrated Systems. 2006, 6173: 61730F-1-9. https://doi.org/10.1117/12.658117.
[19] PARADIES R, CIRESA P. Active wing design with integrated flight control using piezoelectric macro fiber composites[J]. Smart Materials and Structures, 2009, 18(3): 1-9.
[20] 王晓宇, 从 强, 林秀娟, 陈海燕, 王浩威, 周科朝, 张 斗. 压电纤维复合物驱动应变性能的模拟和优化[J]. 中国有色金属学报, 2015, 25(11): 3113-3118.
WANG Xiao-yu, CONG Qiang, LIN Xiu-juan, CHEN Hai-yan, WANG Hao-wei, ZHOU Ke-chao, ZHANG Dou. Modeling and optimization of actuation strain property of piezoelectric fiber composites[J]. The Chinese Journal of Nonferrous Metals, 2015, 25(11): 3113-3118.
[21] 张智雄, 郑学军, 张 勇, 梅靖羚, 费明祥, 祝元坤. 并联结构d15模式PZT-51悬臂梁的俘能性能[J]. 中国有色金属学报, 2015, 25(8): 2183-2189.
ZHANG Zhi-xiong, ZHEN Xue-jun, ZHANG Yong, MEI Jing-lin, FEI Ming-xiang, ZHU Yuan-kun. Features of d15 mode PZT-51 ceramic cantilever piezoelectric energy harvester with parallel connection[J]. The Chinese Journal of Nonferrous Metals, 2015, 25(8): 2183-2189.
[22] 朱 松, 陈子琪, 林秀娟, 周科朝, 张 斗. 悬臂梁基板对压电纤维复合物驱动性能的影响[J]. 中国有色金属学报, 2015, 25(7): 1904-1910.
ZHU Song, CHEN Zi-qi, LIN Xiu-juan, ZHOU Ke-chao, ZHANG Dou. Effect of cantilever substrate on the driving performance of piezoelectric fiber composites[J]. The Chinese Journal of Nonferrous Metals, 2015, 25(7): 1904-1910.
[23] 陈西平, 付 庄, 曹其新, 赵言正, 杨志刚, 程光明. 压电型惯性冲击机构的驱动波形分析[J]. 压电与声光, 2005, 27(3): 316-319.
CHEN Xi-ping, FU Zhuang, CAO Qi-xin, ZHAO Yan-zheng, YANG Zhi-gang, CHENG Guang-ming. Driving waveform analysis of piezoelectric inertial impact mechanism[J]. Piezoelectrics and Acoustooptics, 2005, 27(3): 316-319.
[24] LIN X J, ZHOU K C, BUTTON T W, ZHANG D. Fabrication, characterization, and modeling of piezoelectric fiber composites[J]. Journal of Applied Physics, 2013, 114(2): 027015-1-5.
[25] 崔玉国, 孙宝元, 董维杰, 杨志欣. 压电陶瓷执行器迟滞与非线性成因分析[J]. 光学精密工程, 2003, 11(3): 270-275.
CUI Yu-guo, SUN Bao-yuan, DONG Wei-jie, YANG Zhi-xin. Analysis of delay and nonlinearity of piezoelectric actuator[J]. Optics and Precision Engineering, 2003, 11(3): 270-275.
[26] MASYS A J, REN W, YANG G, MUKHERJEE B K. Piezoelectric strain in lead zirconate titanate ceramics as a function of electric field, frequency, and dc bias[J]. Journal of Applied Physics, 2003, 94(94): 1155-1162.
[27] BENT A A, HAGOOD N W. Piezoelectric fiber composites with interdigitated electrodes[J]. Journal of Intelligent Material Systems and Structures, 1997, 8(11): 903-919.
Effect of voltage characteristic to driving property of piezoelectric fiber composites
YUAN Xi1, WANG Xiao-yu2, WANG Hao-wei2, CHEN Hai-yan1, LIN Xiu-juan1, YAN Ming-yang1, ZHANG Shao-feng1, ZHOU Ke-chao1, ZHANG Dou1
(1. State Key Laboratory of Powder Metallurgy, Central South University, Changsha 410083, China;
2. Beijing Spacecraft System Engineering, Beijing 100094, China)
Abstract: As one of the smart materials, the piezoelectric fiber composites (PFCs) have shown superior performance in aspects of flexibility, high electromechanical response rate and long service life. The requirements of the driving voltage properties were different when the PFCs were used in various areas. In this paper, the strain of PFCs and the tip displacement of the cantilever beam were studied under different driving conditions, including the amplitude, bias and waveform of voltage. The results show that the actuating properties of PFCs, such as strain and the tip displacement of cantilever beam increase when the amplitude of driving voltage amplifies. Both the transverse and longitudinal strain of the PFCs decrease when the bias of voltage amplifies. After being driven by square-wave alternating voltage, the transverse and longitudinal strain of PFCs are 2061.4×10-6 and 574.9×10-6, respectively, which are larger than those driven by sine-wave and sawtooth-wave voltage. It is mainly due to the step characteristic of voltage.
Key words: piezoelectric fiber composites; voltage characteristic; waveform; driving performance
Foundation item: Project(51672311) supported by the National Natural Science Foundation of China; Project (2016WK2022) supported by the Science and Technology Project of Hunan Province, China
Received date: 2017-12-18; Accepted date: 2018-05-29
Corresponding author: WANG Xiao-yu; Tel: +86-10-68113243; E-mail: antlb@163.com
ZHANG Dou; Tel: +86-731-88877196; E-mail: dzhang@csu.edu.cn.
(编辑 何学锋)
基金项目:国家自然科学基金资助项目(51672311);湖南省科技计划资助项目(2016WK2022)
收稿日期:2017-12-18;修订日期:2018-05-29
通信作者:王晓宇,高级工程师,博士;电话:010-68113243;E-mail:antlb@163.com
张 斗,教授,博士;电话:0731-88877196;E-mail:dzhang@csu.edu.cn

