
DOI�� 10.11817/j.issn.1672-7207.2021.04.010
���ڸ��ذڶ�״̬���Ƶ�˫���͵�����ģ����
Ф�Ѹ�1, 2��������1, 2����ε1, 2��л����1, 2
(1. ���ϴ�ѧ ��ͨ���乤��ѧԺ������ ��ɳ��410075��
2. ���ϴ�ѧ �����ͨ��ȫ�ؼ��������ʺ�������ʵ���ң����� ��ɳ��410075)
ժҪ�����ʵ������������˫�ڵ����ĸ��ذڶ�����ֱ�Ӳ��������⣬���һ�ֻ��ڸ��ذڶ�״̬���Ƶ�˫���͵�����ģ���Ʒ������÷������ȸ���˫�ڵ����Ķ���ѧģ���Ƶ��ڽ�֮�����Ϲ�ϵ��Ȼ�������������״̬�۲���(LESO)�۲⸺�صİڶ�״̬�������䷴������ģ�������У��õ�˫���͵������ڶ�λ�����������Կ��������ȶ��Խ����ϸ����ѧ֤�����о����������LESO�Ը��ذڶ��Ĺ۲�����С��������ֵ��������ģ������������˵��������ڶ�λЧ��������Ƶĸ��ذڶ�״̬�۲����ܹ�����������������ã����ñ��Ŀ��Ʒ�����̨�������������ؼ������ڶ����ȶ���С���ҶԸ���������������̨��λ�ñ仯���Ŷ��к�ǿ��³���ԡ�
�ؼ��ʣ�Ƿ�������������ذڽǣ�����״̬�۲��������ڣ���ģ����
��ͼ����ţ�TP273 ���ױ�־�룺A
���±�ţ�1672-7207��2021��04-1129-09
Sliding mode control for double-pendulum overhead cranes with playload swing state observation
XIAO��Yougang1, 2, ZHU��Chengzhen1, 2, LI��Wei1, 2, XIE��Jingsong1, 2
(1. School of Traffic and Transportation Engineering, Central South University, Changsha 410075, China;
2. Joint International Research Laboratory of Key Technology for Rail Traffic Safety, Central South University, Changsha 410075, China)
Abstract: In view of the problem that playload swing of the double-pendulum crane is difficult to measure directly during the actual production process, a sliding mode controller for double-pendulum overhead cranes was proposed based on the playload swing estimation. Firstly, according to the dynamic model of double-pendulum crane, the coupling relationship was deduced between hook swing and playload swing, then a linear expansion state observer(LESO) was designed to estimate the playload swing, and a sliding mode controller which was designed for double-pendulum crane swing suppression was improved by playload swing feedback. The stability of the controller was strictly proved by Lyapunov technique. The results show that the estimate error of playload swing is very small, and the designed playload swing state observer can replace sensor for playload swing measurement. The proposed method needs the less maximum actuating force and has better performance in swing suppression and strong robustness when the playload mass, rope length, trolley situation and disturbance are alterable.
Key words: underactuated crane; playload swing; expanded state observer; swing suppression; sliding mode control
Ƿ������������ǿ���ת���������ڽ������ۿڡ����֡�����ȳ��������������˷dz���Ҫ�����á�Ȼ��������Ŷ���������ͣ���ٶȱ仯�ȶ���ʹ���ذڶ�������ʹ����������Ч�ʽ��ͣ����һ�������İ�ȫ������Ϊ�˽����һ���⣬ѧ���ǽ�������Ϊ���ڣ�������������Ƹ��ذڶ��ķ���[1-10]��Ȼ�������������˵ĸ�������������������ɺ��ԣ����������̨���ڶ������ػ��Ƶ����ڶ������ֳ����ӵ�˫������˫��ЧӦʹϵͳ�˶�ά�����ӣ�Ƿ�����Ը�ǿ�������Ѷ����ӡ�Ŀǰ������ѧ�����˫�ڵ������һЩ���Ʒ������磺SINGHOSE��[11]�����������η�����̨���켣������Ƹ��ٿ������Ըù켣���и��٣�ʵ����̨����λ���ذڶ����ơ�TANG��[12]���̨���˶��ͻ����������ĺ��ذڶ����������һ���켣������̨���˶�����İڶ�����һ���켣���ƻ���������İڶ����γ���2���˶��켣���ϵĿ��Ʒ������º�[13]����˫�ڵ������������еĸ�����������ȫԼ�������������Ż�����ʱ����Ż����������ø�˹α������Լ�����Ż�����ת��Ϊ���д���Լ���ķ����Թ滮���⡣ZHANG��[14]��̨����λ�ο��켣���������ڻ��ڣ���ͨ��������ϵó���̨�����ٶȹ켣��ʵ����̨��λ��һ�������ڶ��Ŀ��ơ�������[15]����ϵͳ��ȫ�Լ�̨���˶�������Լ����ͨ������ƽ̹����źţ���˫�ڵ�����״̬Լ��ת��Ϊ��ƽ̹�����Լ��������˴���״̬Լ����˫�ڵ������Ź켣�滮������MASOUD��[16-17]����˫�ڵ���ϵͳ��һ��ģ̬����˻�����������ͨ�����ַ��������������ɵ�һ��ģ̬����IJ����ڶ����������ڱջ�ϵͳ�ĵ�һ�װڶ�Ƶ�ʵ����������������ⷴ�����ƻ��ڽ�ϣ������˫�ڵ�����λ���ڿ��Ƶ�Ƶ�ʵ����������η���QIAN��[18]Ϊ����˫����ʽ�����ڶ��������һ�ֻ��ڵ��������ģ���ģ����������OUYANG��[19]�������Ծ���ʽ�������һ�ּ���³������������˫����ʽ�����İڶ���ZHANG��[20]�����������ε�˼�룬�����һ�ִ��и������Լ��������Ӧ���ٿ���������ϵͳ������ȷ���Լ��ⲿ�Ŷ������ܱ�֤ϵͳ�Ľ����������ܡ�TUAN��[21]�����1����ͳ��ģ��������1����㻬ģ�������������˫����ʽ�����Ķ�λ�������⡣SUN��[22-23]�����һ�ֱ��ͷ��������������������һ�ַ�����PID�������������˫����ʽ�����İڶ����⡣ZHANG��[24]ͨ������һ��������źţ������һ���г�ʼ����Լ����������Ͽ��Ʒ������ɾ�ȷ������̨����Ŀ��λ�ã����ٵ����Ʋ��������������ذڶ���������[25]Ϊ��ʹ˫�ڵ����ڿ��پ���λ��ͬʱ���ưڶ��������һ�ֻ��ڳ������Ĺ⻬³�������㷨����������[26]�����˲�ȷ���Զ�˫�ڵ����켣�滮��Ӱ�죬���һ�ֻ���Chebyshev����ģ�͵�˫�ڵ�����ȷ���Թ켣�滮��ⷽ����OUYANG��[27-28]�����ʽ��������ת���ػ��Ķ�λ�Ͱڶ��������⣬���һ�����ͻ�ģ�����㷨��ZHANG[29]����ģ���ƺ�PD���Ƹ��ϣ�������˫����ʽ���������ǿ��PD��ģ���ơ�Ȼ��������˫���͵���ϵͳ����Ҫ��������ϵͳ״̬��ʵʱ������Ϣ���п��ƣ���Ȼʵ��������ͨ����������ܹ�����Ҫ����ʵ�������У������ĸ��ذڶ�����ͨ����װ������ֱ�Ӳ����������һ���⣬�������߶�˫���͵����Ķ���ѧģ�ͽ��б任���ó�2���ڽ�֮�����Ϲ�ϵ���������һ����������״̬�۲���(LESO)��ͨ����LESO���õ����ڶ����������Լ�ģ����Ϣ�۲⸺�ذڶ����ø��ذڶ��Ĺ���ֵ����ʵ��ֵ����������ģ�������У��õ�˫���͵������ڶ�λ�����������Կ��������ȶ��Խ����ϸ����ѧ֤����
1 ˫�ڵ���ϵͳ��������
ͼ1��ʾΪ˫���͵�����ʾ��ͼ����ͼ1���Կ�����̨���ص����˶���Ϊ���������֣���������ΪǷ�������֣�̨�����õ������������͵�Ŀ�ĵء���̨����ͣ���Ӽ��ٹ����У���������̨���ڶ������ػ��Ƶ����ڶ������ָ��ӵĶ�����ЧӦ������Ӱ���������ҵЧ�ʺͰ�ȫ���ܡ�˫���͵�������ѧģ������[21, 24]��

 (1)
(1)


 (2)
(2)

 (3)
(3)
���У�M��m1��m2�ֱ�Ϊ̨�������������ص���������Ϊ�����Ĵ���ڽǣ�ͨ����������ã���Ϊ���صĴ���ڽǣ�ʵ�����Ѳ⣻l1Ϊ�������ȣ�l2Ϊ�����븺������֮��ľ��룻gΪ�������ٶȣ�FtΪ̨����������xΪ̨��λ�ƣ�FrΪ̨��Ħ������ ��frox����x��krΪ��Ħ������ص�ϵ����
��frox����x��krΪ��Ħ������ص�ϵ����
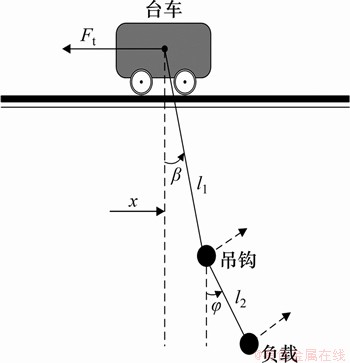
ͼ1��˫���͵���ϵͳʾ��ͼ
Fig.1��Schematic diagram of double-pendulum crane
���ǵ�ʵ����ҵ������һ�������ڽ�ͨ������10�����ڣ��� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
��
��ʽ(1)��(2)��(3)�� =0��ͦ�=0��ʱ�������Ի�����������F=Ft-Fr���õ�˫�ڵ����Ľ�������ģ�ͣ�
=0��ͦ�=0��ʱ�������Ի�����������F=Ft-Fr���õ�˫�ڵ����Ľ�������ģ�ͣ�
 (4)
(4)

 (5)
(5)
 (6)
(6)
��ʽ(4)���˳���l1����ʽ(5)����ɵ�
 (7)
(7)
��ʽ(6)���˳���l1��ʽ(5)���˳���l2����������ɵ�
 (8)
(8)
��(7)����(8)������ɵ�
 (9)
(9)
2 ˫���͵�������״̬�۲�����Ƽ��ȶ���֤��
Ϊ������˫���͵����Ŀ���Ч�����������״̬�۲������Ը��ذڽǵ�״̬���й۲⡣���=��1����ʽ(9)�������ţ���
 (10)
(10)
ʽ�У�r= ����ʽ(10)д�ɾ�����ʽ����
����ʽ(10)д�ɾ�����ʽ����
 (11)
(11)
���� ��
�� ��
�� ��
�� ��
�� ��
�� ��
�� ��
��
����ʽ(11)�����������״̬�۲���(LESO)��
 (12)
(12)
���У� ��Ϊ�����ȵ�״̬���ƣ�
��Ϊ�����ȵ�״̬���ƣ� Ϊ�õ�״̬���ƣ�LΪ�۲�����������
Ϊ�õ�״̬���ƣ�LΪ�۲����������� ����0Ϊ����Ƶ�LESO�Ĵ�����
����0Ϊ����Ƶ�LESO�Ĵ�����
��������eΪ���� �Ĺ۲���
�Ĺ۲��� ����
���� ��
�� ��
�� ����ʽ(11)��ʽ(12)�ù۲�����̣�
����ʽ(11)��ʽ(12)�ù۲�����̣�
 (13)
(13)
�� =
= ��
�� =
= ��
�� =
=
 �������̸���Ϊ
�������̸���Ϊ
 (14)
(14)
�� ��
�� ��
�� ����
���� ����ˣ�ʽ(14)����������Ϊ
����ˣ�ʽ(14)����������Ϊ
 (15)
(15)
��Hurwitz������֪�������������и�ʵ���ij�Ҫ����Ϊ��a>0��b>0��c>0��ab-c>0��
�� �����ݰͶ�������ʽ�������ϵͳ��Lyapunov����V��
�����ݰͶ�������ʽ�������ϵͳ��Lyapunov����V��

 (16)
(16)
�� �ɵ�
�ɵ� ����
����

 (17)
(17)
��ʽ(17)��ʽ(14)���룬��
 (18)
(18)
��ˣ�V����������3Ϊ0ʱ�� ��LESO����e1=0��e2=0��e3=0Ϊƽ���Ĵ�Χ�ڽ����ȶ�������3��0ʱ���ٶ�|��3|�ܦ�(��Ϊ������)����ϵͳ�ȶ�ʱ����
��LESO����e1=0��e2=0��e3=0Ϊƽ���Ĵ�Χ�ڽ����ȶ�������3��0ʱ���ٶ�|��3|�ܦ�(��Ϊ������)����ϵͳ�ȶ�ʱ����
 (19)
(19)
����ʽ(13)�ɵ���ΧΪ
 (20)
(20)
��ˣ�ֻҪʹ��0>>�ǣ���e1��e2��e3��0����
 (21)
(21)
3 �������͵������ڻ�ģ���������
��ʽ(4)��(5)��(6)���������ɵã�
 (22)
(22)
(23)
 (24)
(24)
��ex=x-pd�����廬ģ��Ϊ
 (25)
(25)
���У�c1��c2��c3��c4��c5Ϊ������ϵ�����Ի�ģ��s�ɵ�
 (26)
(26)
��ʽ(22)��(23)��(24)����ʽ(26)�ɵ�

 (27)
(27)
�� ��������������
�������������� ��
��


 (28)
(28)
��ʽ(28)�м����Ի�ģ��sΪ�������л�������sgn(s)(���Ц�Ϊ����)��������ɿɸ���Ϊ
 (29)
(29)
���ڷ��ź�����������ʽ(29)��ʾ�Ŀ������ᵼ��ϵͳ������ˣ�����˫�����к���������ź������õ�������˫���͵���������C1��
 (30)
(30)
������ϵͳ��Lyapunov����V1����Ϊ
 (31)
(31)
��ȻV�����������ģ���ʽ(31)����ʱ���ɵ�
 (32)
(32)
��������(30)����ʽ(27)�ɵ�
 (33)
(33)
��ʽ(33)����ʽ(32)�ɵ�
 (34)
(34)
��ˣ�����ƵĿ���ϵͳ�ǽ����ȶ��ġ�
4 ������������
Ϊ��֤��������Ƶ�LESO����Ч���Լ����䷴������������Ŀ���Ч��������������Ļ��ڸ��ذڶ�״̬�۲��˫���͵���������C1������[24]����Ļ���������ϵ�˫���͵���������C2������[21]�����˫���͵�����ģ������C3���з���Աȡ������У�M=20 kg��m1=1 kg��m2=5 kg��l1=2 m��l2=0.4 m��g2=9.8 m/s2��frox=8����x=0.01��kr=-1.2��̨������Ŀ��λ��pd=2 m���Բ����������������C1�Ŀ��Ʋ���ΪC1=0.60��C2=0.45��C3=5.12��C4=-0.04��C5=-1.78����
����[24]����Ļ���������ϵ�˫���͵���������C2��ѧ����ʽΪ
 (35)
(35)
���У� ��ex=x-pd����Ӧ����������Ϊkp=12��kd=30����1=-6����2=-1��
��ex=x-pd����Ӧ����������Ϊkp=12��kd=30����1=-6����2=-1��
����[21]�����CSMC˫���͵���������C3��ѧ����ʽΪ


 (36)
(36)
���У� Ϊ���ͳ�����sΪ��ģ�棬
Ϊ���ͳ�����sΪ��ģ�棬 ����Ӧ����������Ϊ��=0.5��a=17��b=-11��K=90��
����Ӧ����������Ϊ��=0.5��a=17��b=-11��K=90��
3�ֿ������Ŀ������ܱȽϼ���1��ͨ���Աȱ�1��3�ֿ����������ܷ��֣��ڿ���������ʱ������(1 s��)������£��������᷽�����Ƶĵ������ڽǡ��������ڽǶ�������2�ַ�����С���������ڽǽ�Ϊ1.21�㣬�������ڽǽ�Ϊ1.20�㣬�һ�������ڶ��������븺�صIJ���ڽǽ��ֱ�Ϊ0.07���0.05�㣻��Ȼ̨������ʱ���Ա�����2�ַ����ĸߣ���̨�����������������2�ַ������ٺܶ࣬��Ϊ13.11 N��˵����ִ��������������Ҫ��ͣ��ܺ��١���ˣ���LESO�Ĺ۲�����������ģ�����У�����ȡ�ýϺõĿ���Ч����Ҳ˵��LESO�Ĺ۲���ȷ���ɿ���
��1��3�ֿ������Ŀ������ܱȽ�
Table 1��Control performance comparison of three controllers

Ϊ����֤�����㷨��³���ԣ����4�����ʵ�飬���У�ǰ3��ʵ��ֱ�仯�����������������ȡ�Ŀ��λ�ã��������Ŀ��Ʋ���������ģ�Ͳ��������ֲ��䣬��4��ʵ�����еIJ��������ֲ��䣬ֻʩ���Ŷ���
�ڸ�������m2�ֱ�Ϊ1��3��5 kgʱ�������㷨�Ŀ��ƽ����ͼ2��ʾ����ͼ2���Կ�����̨����8 s�ڶ�������Ŀ��λ�������κγ�����˵�����������仯��̨����λ�͵���ʱ�伸��û��Ӱ�죻�渺���������ӣ����������ذڶ������Լ��٣����������Ժ��ԣ��ҵ��������ذڶ�ʱ�伸�����䣬̨���������仯����Ҳ����˵�������������仯ʱ��������C1�������仯�����С�
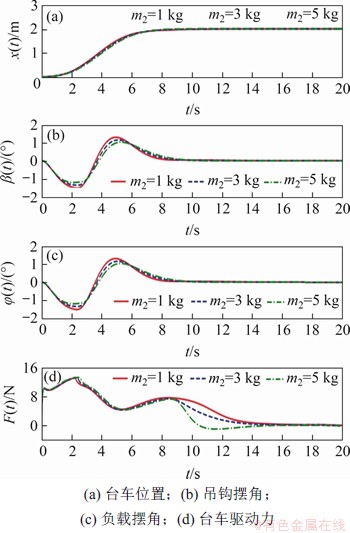
ͼ2����ͬ�������������᷽���Ŀ��ƽ��
Fig. 2��Control results for proposed method with different playload masses
�ڵ�������l1�ֱ�Ϊ1��2��4 mʱ�������㷨�Ŀ��ƽ����ͼ3��ʾ����ͼ3���Կ�����������ȡ��ֵͬʱ������Ŀ��λ�õ�ʱ�伸�����䣬����8 s���ȶ�����ڳ����ӣ��ڶ��������������仯������0.1�����ڣ����Ժ��Բ��ƣ��ڶ��ȶ�ʱ��Ҳ����8 s���ң��������������������仯�������ֵ������14 N�����ں�����Χ���ڣ�˵�������㷨�ڰڳ������仯ʱ��³���ԽϺá�
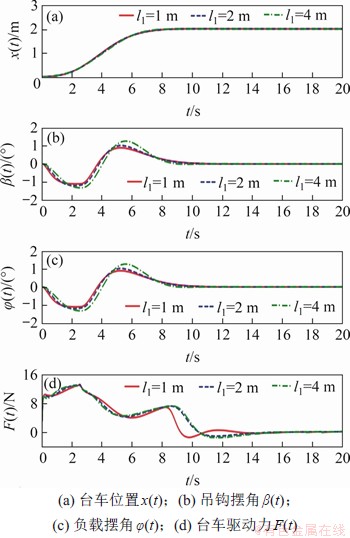
ͼ3����ͬ���������᷽���Ŀ��ƽ��
Fig.3��Control results for proposed method with different rope lengths
Ϊ����֤�㷨�ڲ�ͬ�����µĿ���Ч������������·���ʵ�飬̨��Ŀ��λ��pd�ֱ�Ϊ1��2��3��4 m����������ͼ4��ʾ����ͼ4���Կ�����̨�����ɵ��ﲻָͬ��Ŀ��λ�ã������κγ�������Ŀ��λ�����ڶ��������ӣ������������������������еİڶ����ȶ�������2�㣻��̨������Ŀ��λ�ú�����ڶ����������涨λ���������������������ӷ��Ⱥ�С��˵�����᷽����ִ����������������£�������Ӧ�ȽϿ�����ҵ��Χ�������ڷ��ӵ�����Ч�ܡ�
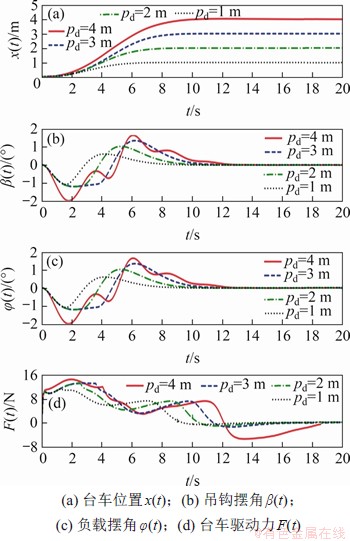
ͼ4����ͬĿ��λ�������᷽���Ŀ��ƽ��
Fig. 4��Control results for proposed method with different desired situations
Ϊ����֤�㷨�Ŀ�������������Ը�����9 sʱʩ��������š�15~16 sʱʩ�����Ҹ��ţ���ֵ��Ϊ2�㡣��ͬ�����µĿ��ƽ����ͼ5��ʾ����ͼ5���Կ�������ʩ�Ӹ���֮���Ŷ��ɿ������������Ұڽ������Ⱦ���2�����ڣ�˵�����㷨�Ŀ�����������ǿ��
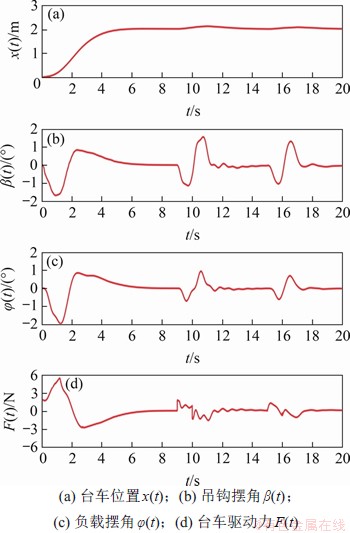
ͼ5����ͬ���������᷽���Ŀ��ƽ��
Fig. 5��Control results for proposed method with different disturbances
5 ����
1) ���õ����ڽ��븺�ذڽ�֮�����Ϲ�ϵ��Ƶ�LESO�ܹ��Ը��ذڽǽ�����Ч�۲⣬�ܹ����洫������ʵ��ֵ��˫���͵������з������ƣ��˷�������˫���͵�����������Ҫ��װ�������ıˣ������˿���װ�õĸ��Ӷȣ��������ڹ���ʵ��Ӧ�á�
2) ��LESO�Ը��ذڶ��Ĺ���ֵ��������ģ�������У��γ��˵������ڶ�λ��������������Lyapunov����֤���˸ÿ������Ľ����ȶ��ԡ��������ڸ���������������̨��λ�ñ仯����¶����кܺõ����ڶ�λ���ܣ���̨�������������������ذڶ���������2�ֶԱȷ����ã�˵�����᷽����ִ����������������£�������Ӧ�ȽϿ�����ҵ��Χ�������ڷ��ӵ�����Ч�ܡ�
3) �ڲ�ͬ����Ŷ������£����᷽�����ܺܿ�������Ե������ڶ�λ��Ӱ�죬³�������á�
�ο����ף�
[1] Ф�Ѹ�, ¬��, ����, ��. ������������Ƿ�����������ڶ�λȫ�����Կ��ſ���[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2019, 50(11): 2703-2711.
XIAO Yougang, LU Hao, YU Yi, et al. WADRC for anti-swing positioning of underactuated crane with one parameters tuning[J]. Journal of Central South University(Science and Technology), 2019, 50(11): 2703-2711.
[2] MAGHSOUDI M J, MOHAMED Z, HUSAIN A R, et al. An optimal performance control scheme for a 3D crane[J]. Mechanical Systems and Signal Processing, 2016, 66/67: 756-768.
[3] POTTER J J, SINGHOSE W E. Design and human-in-the-loop testing of reduced-modification input shapers[J]. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1513-1520.
[4] HILHORST G, PIPELEERS G, MICHIELS W, et al. Fixed-order linear parameter-varying feedback control of a lab-scale overhead crane[J]. IEEE Transactions on Control Systems Technology, 2016, 24(5): 1899-1907.
[5] CHEN He, FANG Yongchun, SUN Ning. A swing constraint guaranteed MPC algorithm for underactuated overhead cranes[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(5): 2543-2555.
[6] SUN Ning, FANG Yongchun, CHEN He, et al. Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters: design and experiments[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(5): 2107-2119.
[7] SUN Ning, FANG Yongchun, CHEN He, et al. Nonlinear stabilizing control for ship-mounted cranes with ship roll and heave movements: design, analysis,and experiments[J]. IEEE Transactions on Systems,Man,and Cybernetics: Systems, 2018, 48(10): 1781-1793.
[8] LI Xue, PENG Xiuhui, GENG Zhiyong. Anti-swing control for 2-D under-actuated cranes with load hoisting/lowering: a coupling-based approach[J]. ISA Transactions, 2019, 95: 372-378.
[9] WU Xianqing, XU Kexin, HE Xiongxiong. Disturbance-observer-based nonlinear control for overhead cranes subject to uncertain disturbances[J]. Mechanical Systems and Signal Processing, 2020, 139: 106631.
[10] RAMLI L, MOHAMED Z, EFE M O, et al. Efficient swing control of an overhead crane with simultaneous payload hoisting and external disturbances[J]. Mechanical Systems and Signal Processing, 2020, 135: 106326.
[11] SINGHOSE W, KIM D, KENISON M. Input shaping control of double-pendulum bridge crane oscillations[J]. Journal of Dynamic Systems, Measurement, and Control, 2008, 130(3): 034504.
[12] TANG Rui, HUANG Jie. Control of bridge cranes with distributed-mass payloads under windy conditions[J]. Mechanical Systems and Signal Processing, 2016, 72/73: 409-419.
[13] �º�, ���´�, ����, ��. ����α����˫�ڵ���ʱ���������ڹ켣�滮����[J]. �Զ���ѧ��, 2016, 42(1): 153-160.
CHEN He, FANG Yongchun, SUN Ning, et al. Pseudospectral method based time optimal anti-swing trajectory planning for double pendulum crane systems[J]. Acta Automatica Sinica, 2016, 42(1): 153-160.
[14] ZHANG Menghua, MA Xin, CHAI Hui, et al. A novel online motion planning method for double-pendulum overhead cranes[J]. Nonlinear Dynamics, 2016, 85(2): 1079-1090.
[15] ����, ���´�, Ǯ����. ����״̬Լ����˫��ЧӦ�����켣�滮[J]. ����������Ӧ��, 2014, 31(7): 974-980.
SUN Ning, FANG Yongchun, QIAN Yuzhe. Motion planning for cranes with double pendulum effects subject to state constraints[J]. Control Theory & Applications, 2014, 31(7): 974-980.
[16] MASOUD Z N, ALHAZZA K A. Frequency-modulation input shaping control of double-pendulum overhead cranes[J]. Journal of Dynamic Systems, Measurement, and Control, 2014, 136(2): 021005.
[17] MASOUD Z, ALHAZZA K, ABU-NADA E, et al. A hybrid command-shaper for double-pendulum overhead cranes[J]. Journal of Vibration and Control, 2014, 20(1): 24-37.
[18] QIAN Dianwei, TONG Shiwen, LEE S. Fuzzy-Logic-based control of payloads subjected to double-pendulum motion in overhead cranes[J]. Automation in Construction, 2016, 65: 133-143.
[19] OUYANG Huimin, DENG Xin, XI Huan, et al. Novel robust controller design for load sway reduction in double-pendulum overhead cranes[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019, 233(12): 4359-4371.
[20] ZHANG Menghua, MA Xin, RONG Xuewen, et al. Adaptive tracking control for double-pendulum overhead cranes subject to tracking error limitation, parametric uncertainties and external disturbances[J]. Mechanical Systems and Signal Processing, 2016, 76/77: 15-32.
[21] TUAN L A, LEE S G. Sliding mode controls of double-pendulum crane systems[J]. Journal of Mechanical Science and Technology, 2013, 27(6): 1863-1873.
[22] SUN Ning, YANG Tong, FANG Yongchun, et al. Transportation control of double-pendulum cranes with a nonlinear quasi-PID scheme: design and experiments[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, 49(7): 1408-1418.
[23] SUN Ning, WU Yiming, FANG Yongchun, et al. Nonlinear antiswing control for crane systems with double-pendulum swing effects and uncertain parameters:design and experiments[J]. IEEE Transactions on Automation Science and Engineering, 2018, 15(3): 1413-1422.
[24] ZHANG Menghua, MA Xin, RONG Xuewen, et al. A novel energy-coupling-based control method for double-pendulum overhead cranes with initial control force constraint[J].Advances in Mechanical Engineering, 2018, 10(1): 1-13.
[25] ����, �Ž�һ, ������, ��. һ��˫��ЧӦ��ʽ���ػ��⻬³�����Ʒ���[J]. ������, 2019, 38(22): 1-6.
SUN Ning,ZHANG Jianyi,WU Yiming,et al.Continuous robust control for double-pendulum overhead cranes[J].Journal of Vibration and Shock, 2019, 38(22): 1-6.
[26] ������, ʩ����, ����, ��. �������䲻ȷ���Ե�˫�ڵ����˶��켣�滮[J]. ��е����ѧ��, 2019, 55(2): 204-213.
PENG Haijun, SHI Boyang, WANG Xinwei, et al. Trajectory planning of double pendulum crane ConsideringInterval uncertainty[J]. Journal of Mechanical Engineering, 2019, 55(2): 204-213.
[27] OUYANG Huimin, WANG Jian, ZHANG Guangming, et al. Novel adaptive hierarchical sliding mode control for trajectory tracking and load sway rejection in double-pendulum overhead cranes[J]. IEEE Access, 2019, 7: 10353-10361.
[28] ŷ������, ����, �Ź���, ��. �������ͻ�ģ�㷨��˫����ת���ػ����ڸ��ٿ���[J]. �Զ���ѧ��, 2019, 45(7): 1344-1353.
OUYANG Huimin, WANG Jian, ZHANG Guangming, et al. Tracking and anti-sway control for double-pendulum rotary cranes using novel sliding mode algorithm[J]. Acta Automatica Sinica, 2019, 45(7): 1344-1353.
[29] ZHANG Menghua, ZHANG Yongfeng, CHENG Xingong. An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems[J]. International Journal of Control, Automation and Systems, 2019, 17(6): 1579-1588.
(�༭ �²ӻ�)
�ո����ڣ� 2020 -06 -06; �����ڣ� 2020 -08 -20
������Ŀ(Foundation item)�������ص��з��ƻ���Ŀ(2016YFB1200602-34) (Project(2016YFB1200602-34) supported by the National Key Research and Development Program of China)
ͨ�����ߣ�Ф�Ѹգ���ʿ�����ڣ���ʿ����ʦ�������豸״̬��������ܿ����о���E-mail: csuxyg@163.com
���ø�ʽ�� Ф�Ѹ�, ������, ��ε, ��. ���ڸ��ذڶ�״̬���Ƶ�˫���͵�����ģ����[J].���ϴ�ѧѧ��(��Ȼ��ѧ��), 2021, 52(4): 1129-1137.
Citation: XIAO Yougang, ZHU Chengzhen, LI Wei, et al. Sliding mode control for double-pendulum overhead cranes with playload swing state observation[J]. Journal of Central South University(Science and Technology), 2021, 52(4): 1129-1137.

