DOI: 10.11817/j.issn.1672-7207.2016.07.015
өзТәұИАэ·§ҝШ·З¶ФіЖёЧПөНіөДёәФШБчБҝМШРФ
ФшАЦ1, 2Ј¬М·ҪЁЖҪ1Ј¬СоҝЎ1Ј¬ЦЬУо·е1
(1. ЦРДПҙуС§ »ъөз№ӨіМС§ФәЈ¬ёЯРФДЬёҙФУЦЖФм№ъјТЦШөгКөСйКТЈ¬әюДП іӨЙіЈ¬410083Ј»
2. іӨЙіәҪҝХЦ°ТөјјКхС§Фә әҪҝХ»ъРөЦЖФм№ӨіМС§ФәЈ¬әюДП іӨЙіЈ¬410124)
ХӘТӘЈәХл¶ФТәС№ёЧХэ·ҙ·ҪПтФЛ¶ҜМШРФІ»Т»ЦВОКМвЈ¬ҪЁБў°ьә¬ЛАЗшөДөзТәұИАэ·§ҝШ·З¶ФіЖТәС№ёЧПөНіөДКэС§ДЈРНЈ¬·ЦОцНвёәФШұд»ҜЎўТәС№ёЧҪб№№І»¶ФіЖ¶ФПөНіМШРФөДУ°ПмЎЈёщҫЭПөНіөДКэС§ДЈРНөГөҪұИАэ·§ҝӘҝЪҙҰУЪПЯРФЗшУтКұПөНіФЪИОТвёәФШЧҙМ¬ПВөДёәФШБчБҝМШРФЗъПЯЎЈСРҫҝҪб№ыұнГчЈәЛжЧЕТәС№ёЧБҪЗ»Гж»эұИөДјхРЎЈ¬ПөНіөДІ»¶ФіЖМШРФФцҙуЈ»ЛжЧЕС№БҰёәФШФцјУЈ¬ПөНіөД·З¶ФіЖРФПИјхИхәуФцЗҝЈ»ЛжЧЕАӯБҰёәФШөДФцјУЈ¬ПөНіөД·З¶ФіЖРФФцЗҝЈ»КөјКёәФШБчБҝұИУлАнВЫёәФШБчБҝұИПа¶ФОуІоІ»і¬№э6%Ј¬СйЦӨБЛёәФШБчБҝМШРФ·ЦОцөДХэИ·РФЎЈ
№ШјьҙКЈәөзТәұИАэ·§Ј»·З¶ФіЖМШРФЈ»ЛАЗшЈ»ёәФШБчБҝұИ
ЦРНј·ЦАаәЕЈәTH117 ОДПЧұкЦҫВлЈәA ОДХВұаәЕЈә1672-7207(2016)07-2281-06
Load flow property of electrohydraulic proportional valve controlling asymmetric cylinder system
ZENG Le1, 2, TAN Jianping1, YANG Jun1, ZHOU Yufeng1
(1. State Key Laboratory of High Performance Complex Manufacturing,
School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
2. College of Aviation Machinery and Manufacturing Engineering,
Changsha Aeronautical Vocational and Technical College, Changsha 410124, China)
Abstract: Aiming at the inconsistent dynamic property, the mathematic model of asymmetric electrohydraulic proportional system with dead zone was built, and the asymmetric property of the system was analysed based on the model with the influence of the load and the asymmetric structure. The load flow property curve in any load situation was obtained using the mathematic model when the proportional valve was in the linear flow zone. The results show that the asymmetric property of proportional valve is more obvious with the increase of pulling load and the decrease of the area proportion, but is less obvious at first and then more with the increase of pressure load. The relative error between the actual load flow proportion and the theoretical value is less than 6% and the analysis of the load flow property is verified correct.
Key words: electrohydraulic proportional valve; asymmetric system; dead zone; the load flow proportion
өзТәұИАэПөНіҝШЦЖҫ«¶ИёЯЈ¬јЫёсПа¶ФЛЕ·ю·§ҪПөНЈ¬ЗТ¶ФҪйЦКОЫИҫІ»ГфёРЈ¬Тт¶шУҰУГУЪ№ӨТөТәС№ҝШЦЖЦР[1-3]ЎЈИ»¶шЈ¬ПөНіұҫЙнҪб№№әННвёәФШөДІ»¶ФіЖМШРФөјЦВөзТәПөНіФЪХэ·ҙ·ҪПтМШРФІ»Т»ЦВЎЈР춫№вөИ[4-5]ЦӨГчБЛ·§ҝШ·З¶ФіЖУНёЧФЪХэ·ҙПт·§ҝӘҝЪБҝПаөИКұЈ¬ЖдХэ·ҙПтУНёЧЛЩ¶ИұИІўІ»өИУЪУНёЧГж»эұИЎЈХэ·ҙ·ҪПтөДІ»¶ФіЖМШРФФцјУБЛҝШЦЖЖчөДЙијЖДС¶ИЎЈИфПөНі°ҙХХЛЩ¶ИҪПҝмөД·ҪПтЙијЖҝШЦЖЖчЈ¬ФтҪПВэөД·ҪПтҫН»б№эУЪіЩ»әЈ»Иф°ҙХХЛЩ¶ИҪПВэөД·ҪПтЙПЙијЖҝШЦЖЖчЈ¬ФтФЪҪПҝмөД·ҪПт»біцПЦі¬өчЎЈ¶ФөзТәПөНіХэ·ҙПтЛЩ¶ИМШРФөДТ»ЦВРФСРҫҝТ»°гҙУҪб№№әНҝШЦЖАнВЫБҪёц·ҪГжҪшРРЎЈФЪҪб№№ЙПМбіцБЛАыУГЛ«·§РҫЎў·З¶ФіЖ·§өИҝШЦЖ·З¶ФіЖёЧЈ¬ө«УЙУЪ·§өДјУ№ӨёҙФУЈ¬ЗТөұёЯЖөЧӘПтФЛ¶Ҝј°ёәФШұд»ҜЖөВКҪПёЯКұЈ¬¶ФУЪПыіэС№БҰФҫұдәНФЛ¶ҜөДІ»¶ФіЖРФР§№ыҪПІоЈ¬ФЪ№ӨТөЙПУҰУГІ»№г·әЈ¬»№УРҙэЙоИлСРҫҝ[6-7]ЎЈФЪҝШЦЖАнВЫ·ҪГжЈ¬ҙ«НіөДҪвҫц·Ҫ°ёКЗ»щУЪНіТ»ДЈРН[8-10]Ј¬НЁ№эјмІвПөНіЧҙМ¬ІОБҝЈ¬ІЙУГЧФККУҰөДІ№іҘјјКхМбіцәЬ¶аІ№іҘ·Ҫ·Ё[11-15]ЎЈЛдИ»ХвР©·Ҫ·ЁФЪАнВЫЙПДЬУРР§өШҪвҫцІ»¶ФіЖОКМвЈ¬ө«ЛьГЗөД№ІН¬МШөгКЗАнВЫҪПёҙФУЈ¬ІОКэөчҪЪҪП¶аЈ¬ЙијЖәНО¬»ӨДС¶Иҙ󣬶ԹӨіМјјКхИЛФұТӘЗуёЯЈ¬ІўЗТУЙУЪҝШЦЖіМРтұИҪПёҙФУЈ¬КөКұРФІоЈ¬әЬДСФЪ№ӨТөПЦіЎөГөҪ№г·әУҰУГЎЈ»щУЪПөНіҙжФЪІ»¶ФіЖМШРФЈ¬Т»ЦЦУРР§өД·Ҫ·ЁҫНКЗФЪід·ЦБЛҪвПөНіІ»¶ФіЖМШРФ»щҙЎЙПЈ¬ФЪХэЎў·ҙ·ҪПтЙПІЙУГІ»Н¬өДҝШЦЖЖчТФКөПЦХэ·ҙЛЩ¶ИМШРФөДТ»ЦВЎЈ¶ФУЪұИАэ·§Ј¬ҪЁБўБЛЖдБгҝӘҝЪөДКэС§ДЈРНЎЈWILSONөИ[16]¶ФУЪЛАЗшІ»¶ФіЖөД·ЗБгҝӘҝЪДЈРНҪшРРБЛСРҫҝЈ¬Іў·ЦОцБЛЛщҪЁБўДЈРНөДҫ«¶ИЎЈө«ДЈРНІЙУГөДКЗ¶ФіЖёЧЈ¬¶ФУЪ·З¶ФіЖПөНіИұ·ҰЙоИлСРҫҝЈ¬ІўЗТОҙ·ЦОцПөНіёәФШЧҙМ¬ПВМШРФөДұд»ҜЎЈОӘҙЛЈ¬ұҫОДЧчХЯНЁ№эҪЁБўөзТәұИАэ·§ҝШ·З¶ФіЖёЧПөНіөДКэС§ДЈРНЈ¬·ЦОцёәФШұд»ҜУлҪб№№І»¶ФіЖ¶ФПөНіІ»¶ФіЖМШРФөДУ°Пмј°өзТәұИАэ·§ёәФШБчБҝөДУ°ПмЈ¬·ЦұрөГөҪХэПтёәФШБчБҝұИәН·ҙПтёәФШБчБҝұИЎЈ
1 ПөНіДЈРНөДҪЁБў
1.1 »щұҫГиКц
ОДЦРЛщМбөДұИАэ·§ФЪГ»УРМШКвЛөГчКұ¶јЦёұИАэҪЪБч·§ЎЈөзТәұИАэ·§ҝШ·З¶ФіЖёЧПөНіөДФӯАнИзНј1ЛщКҫЈ¬ЦчТӘУЙҙжФЪЛАЗшөДұИАэ·§Іҝ·ЦәН·З¶ФіЖТәС№ёЧІҝ·ЦЧйіЙЎЈНј1ЦРЈ¬ПөНіөД№©УНөДС№БҰОӘpSЈ¬»ШУНөДС№БҰОӘpRЈ¬Т»°гОӘ0 MPaЈ»ҪЪБч·§ЛАЗшЦө·ЦұрОӘҰЕ1SЈ¬ҰЕ1RЈ¬ҰЕ2SәНҰЕ2RЈ¬·§РҫөДО»ТЖОӘxVЈ¬LОӘЧоҙуөД·§РҫО»ТЖЈ»ұИАэ·§РЕәЕ Ј»Q1әНQ2·ЦұрОӘБчИлОЮёЛЗ»әНБчіцУРёЛЗ»өДЧЬБчБҝЈ¬Q1SәНQ2S·ЦұрОӘҪшИлБҪЗ»өДБчБҝЈ¬Q1RәНQ2R·ЦұрОӘБчіцБҪЗ»өДБчБҝЈ¬yОӘ»оИыёЛөДО»ТЖЈ¬p1әНA1·ЦұрОЮёЛЗ»өДС№БҰәНЧчУГГж»эЈ¬p2әНA2·ЦұрУРёЛЗ»өДС№БҰәНЧчУГГж»эЈ¬FОӘНвёәФШБҰЎЈәцВФПөНіөДөҜРФёәФШәНЧиДбБҰЎЈ·ыәЕХэёәәЕөД¶ЁТеОӘЈәБчИлОЮёЛЗ»(1З»)өДБчБҝОӘХэЈ¬БчіцОӘёәЈ»БчіцУРёЛЗ»(2З»)өДБчБҝОӘХэЈ¬БчИлОӘёәЎЈ
Ј»Q1әНQ2·ЦұрОӘБчИлОЮёЛЗ»әНБчіцУРёЛЗ»өДЧЬБчБҝЈ¬Q1SәНQ2S·ЦұрОӘҪшИлБҪЗ»өДБчБҝЈ¬Q1RәНQ2R·ЦұрОӘБчіцБҪЗ»өДБчБҝЈ¬yОӘ»оИыёЛөДО»ТЖЈ¬p1әНA1·ЦұрОЮёЛЗ»өДС№БҰәНЧчУГГж»эЈ¬p2әНA2·ЦұрУРёЛЗ»өДС№БҰәНЧчУГГж»эЈ¬FОӘНвёәФШБҰЎЈәцВФПөНіөДөҜРФёәФШәНЧиДбБҰЎЈ·ыәЕХэёәәЕөД¶ЁТеОӘЈәБчИлОЮёЛЗ»(1З»)өДБчБҝОӘХэЈ¬БчіцОӘёәЈ»БчіцУРёЛЗ»(2З»)өДБчБҝОӘХэЈ¬БчИлОӘёәЎЈ
»щұҫ¶ЁТеЈә
1) ·З¶ФіЖёЧөДБҪЗ»Гж»эЦ®ұИ Ј¬өұ
Ј¬өұ КұјҙОӘ¶ФіЖёЧЎЈ
КұјҙОӘ¶ФіЖёЧЎЈ
2) ¶ФУЪ·З¶ФіЖёЧПөНіЈ¬ёәФШБчБҝ Ј¬ёәФШС№БҰ
Ј¬ёәФШС№БҰ Ј¬өұёәФШОӘС№БҰКұЈ¬pLОӘХэЦөЈ»өұёәФШОӘАӯБҰКұЈ¬pLОӘёәЦөЎЈ
Ј¬өұёәФШОӘС№БҰКұЈ¬pLОӘХэЦөЈ»өұёәФШОӘАӯБҰКұЈ¬pLОӘёәЦөЎЈ
3) ¶ЁТеёәФШБчБҝұИОӘmЈ¬ХэПтёәФШБчБҝұИОӘ ЎЈЖдЦРЈәi (i=0, 1, 2, Ўӯ)ҙъұнІ»Н¬өДёәФШС№БҰЧҙМ¬Ј¬i=0ОӘ»щұҫЧҙМ¬Ј¬ұҫОД°СҝХФШЙиОӘi=0ЧҙМ¬Ј»
ЎЈЖдЦРЈәi (i=0, 1, 2, Ўӯ)ҙъұнІ»Н¬өДёәФШС№БҰЧҙМ¬Ј¬i=0ОӘ»щұҫЧҙМ¬Ј¬ұҫОД°СҝХФШЙиОӘi=0ЧҙМ¬Ј»
·ҙПтёәФШБчБҝұИОӘ ЎЈ
ЎЈ
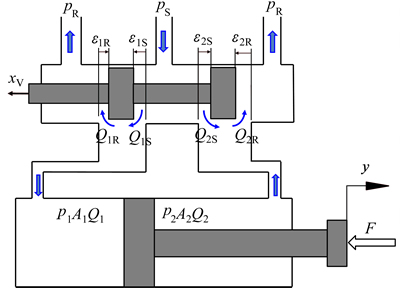
Нј1 өзТәұИАэ·§ҝШ·З¶ФіЖёЧПөНіФӯАнНј
Fig. 1 Principle diagram of asymmetric electrohydraulic proportional system
1.2 ПөНіКэС§ДЈРН
1.2.1 ҪЪБчҝЪКэС§ДЈРН
јЩЙиёчёц·§ҝЪөДГж»эМЭ¶ИПаөИЈ¬БчИл1З»өДҪЪБчҝЪБчБҝДЈРНОӘ

ЖдЦРЈә Ј»CdОӘБчБҝПөКэЈ»
Ј»CdОӘБчБҝПөКэЈ» ОӘГж»эМЭ¶ИЈ»
ОӘГж»эМЭ¶ИЈ» ОӘҪйЦКГЬ¶ИЎЈ
ОӘҪйЦКГЬ¶ИЎЈ
Бчіц1З»өДҪЪБчҝЪБчБҝДЈРНОӘ
Йи¶ЁұҘәНәҜКэ ОӘ
ОӘ
ёщҫЭКҪ(1)Ј¬(2)әН(3)Ј¬1З»ЧЬөДБчБҝДЈРНҝЙТФұнКҫОӘ


Н¬АнЈ¬2З»ЧЬөДБчБҝДЈРНҝЙТФұнКҫОӘ


1.2.2 ТәС№ёЧөДКэС§ДЈРН
ёщҫЭБчБҝБ¬РшРФ·ҪіМЈ¬БҪЗ»өДБчБҝҝЙТФұнКҫОӘЈә


ЖдЦРЈәCiОӘДЪР№В©ПөКэЈ»CeОӘНвР№В©ПөКэЈ» ОӘУНТәМе»эДЈБҝЈ»V10әНV20·ЦұрОӘБҪЗ»іхКјМе»эЎЈУЙУЪР№В©әНМе»эС№ЛхПа¶ФУЪО»ТЖТэЖрөДБчБҝұд»ҜәЬРЎЈ¬№КәцВФР№В©әНМе»эС№ЛхөДУ°ПмЈ¬БҪЗ»өДБчБҝ№ШПөҝЙТФұнКҫОӘ
ОӘУНТәМе»эДЈБҝЈ»V10әНV20·ЦұрОӘБҪЗ»іхКјМе»эЎЈУЙУЪР№В©әНМе»эС№ЛхПа¶ФУЪО»ТЖТэЖрөДБчБҝұд»ҜәЬРЎЈ¬№КәцВФР№В©әНМе»эС№ЛхөДУ°ПмЈ¬БҪЗ»өДБчБҝ№ШПөҝЙТФұнКҫОӘ

1.2.3 ұИАэ·§ҝШ·З¶ФіЖёЧПөНіДЈРН
јЩЙиБҪ·§ҝЪөДЦШөюІОКэУл·§РҫөДЦШөюІОКэЖҘЕдЈ¬јҙ Ј¬
Ј¬ Ј¬ЗТ
Ј¬ЗТ ЎЈөұёәФШПЮ¶ЁФЪТ»¶ЁөД·¶О§ДЪКұЈ¬ПөНіОЮі¬С№УлҝХСЁПЦПу·ўЙъЈ¬ЧЫәПКҪ(4)Ј¬(5)әН(8)ҝЙөГ
ЎЈөұёәФШПЮ¶ЁФЪТ»¶ЁөД·¶О§ДЪКұЈ¬ПөНіОЮі¬С№УлҝХСЁПЦПу·ўЙъЈ¬ЧЫәПКҪ(4)Ј¬(5)әН(8)ҝЙөГ


КҪ(9)КЗЛщУРІОКэөДФјКш·ҪіМЈ¬ФЪИОТвөД·§РҫО»ТЖ»тХЯИОТвөДС№БҰПВ¶јРиТӘұЈЦӨөИКҪ(9)әгіЙБўЎЈ
ТФПВ·Ц2ЦЦЗйҝцҪшРРМЦВЫЎЈ
1) ¶ФУЪёәҝӘҝЪұИАэ·§Ј¬өұұИАэ·§·§РҫО»УЪ·ЗЛАЗшІҝ·ЦЈ¬КҪ(9)әгіЙБўМхјюОӘ
өұұИАэ·§·§РҫО»УЪЛАЗшІҝ·Цјҙ·§РҫО»ТЖОӘ КұЈ¬¶ФУЪИОТвөДС№БҰpSЈ¬pRЈ¬p1әНp2Ј¬КдИлРЕәЕ
КұЈ¬¶ФУЪИОТвөДС№БҰpSЈ¬pRЈ¬p1әНp2Ј¬КдИлРЕәЕ Ј¬ВъЧгКҪ(9)ЎЈПФИ»Ј¬ҙЛКұБчИләНБчіцұИАэ·§өДБчБҝ¶јОӘ0 L/minЎЈ
Ј¬ВъЧгКҪ(9)ЎЈПФИ»Ј¬ҙЛКұБчИләНБчіцұИАэ·§өДБчБҝ¶јОӘ0 L/minЎЈ
2) ¶ФУЪХэҝӘҝЪөДұИАэ·§Ј¬өұұИАэ·§·§РҫО»УЪ·ЗЛАЗшІҝ·ЦКұЈ¬КҪ(9)әгіЙБўМхјюОӘ
өұұИАэ·§·§РҫО»УЪЛАЗшІҝ·Цјҙ·§РҫО»ТЖФЪ ЗшУтДЪКұЈ¬ёәФШБчБҝУЙОЮёЛЗ»БчИлБчБҝәНБчіцөюјУЛщөГЈ¬С№БҰУл·§ҝЪҝӘ¶ИИФВъЧгКҪ(9)Ј¬ө«БчБҝС№БҰМШРФұИҪПёҙФУЈ¬ПөНіҙжФЪІ»ОИ¶ЁЗшУтЈ¬ҝЙДЬ»бөјЦВі¬С№әНҝХСЁөИОКМвЎЈ
ЗшУтДЪКұЈ¬ёәФШБчБҝУЙОЮёЛЗ»БчИлБчБҝәНБчіцөюјУЛщөГЈ¬С№БҰУл·§ҝЪҝӘ¶ИИФВъЧгКҪ(9)Ј¬ө«БчБҝС№БҰМШРФұИҪПёҙФУЈ¬ПөНіҙжФЪІ»ОИ¶ЁЗшУтЈ¬ҝЙДЬ»бөјЦВі¬С№әНҝХСЁөИОКМвЎЈ
ЧЫәПКҪ(4)Ј¬(10)әН(11)Ј¬өұұИАэ·§ҝШ·З¶ФіЖёЧ·§РҫО»ТЖФЪ·ЗЛАЗшЗшУтКұЈ¬Хэ·ҙПтөДБчБҝұнҙпКҪҝЙТФРҙіЙНіТ»өДұнҙпКҪЈә

ЖдЦРЈә Ј»
Ј» ЎЈ
ЎЈ
УЙКҪ(11)ҝЙөГ
k1/k2ҝЙТФ·ҙУіПөНіөД·З¶ФіЖМШРФіМ¶ИЎЈәцВФУНПдС№БҰөДУ°ПмЈ¬УЙk1/k2ҝЙЦӘЈәөұёәФШС№БҰpLТ»¶ЁКұЈ¬ ФҪҙуЈ¬ФтПөНі·З¶ФіЖРФФҪЗҝЈ»өұ
ФҪҙуЈ¬ФтПөНі·З¶ФіЖРФФҪЗҝЈ»өұ Ј¬pLЈҫ0КұЈ¬ЛжЧЕ
Ј¬pLЈҫ0КұЈ¬ЛжЧЕ ФцјУЈ¬ПөНіөД·З¶ФіЖРФПИјхИхәуФцЗҝЈ»өұpLЈј0КұЈ¬ЛжЧЕФцјУЈ¬·З¶ФіЖРФФцЗҝЎЈ
ФцјУЈ¬ПөНіөД·З¶ФіЖРФПИјхИхәуФцЗҝЈ»өұpLЈј0КұЈ¬ЛжЧЕФцјУЈ¬·З¶ФіЖРФФцЗҝЎЈ
ёщҫЭКҪ(12)өГІ»Н¬ёәФШС№БҰЧҙМ¬өДХэПтёәФШБчБҝұИЎў·ҙПтёәФШБчБҝұИЈә
2 ұИАэ·§ҝШ·З¶ФіЖёЧёәФШМШРФ·ЦОц
ПөНіҝХФШКұЈ¬ёәҝӘҝЪұИАэ·§ЛАЗш·¶О§ДЪГ»УРБчБҝКдіцЈ»ХэҝӘҝЪұИАэ·§ЛАЗш·¶О§ДЪөДБчБҝКЗХэ·ҙБҪМШРФЗъПЯөюјУ¶шіЙЈ»ёщҫЭКҪ(12)өГПөНі·ЗЛАЗшІҝ·ЦҝХФШЧҙМ¬ПВөДёәФШБчБҝЗъПЯЎЈФЪҝХФШЧҙМ¬өДёәФШБчБҝЗъПЯ»щҙЎЙПЈ¬ёщҫЭКҪ(13)өГПөНіФЪІ»Н¬өДёәФШЧҙМ¬ПВёәФШБчБҝМШРФЗъПЯЈ¬·ЦұрИзНј2әННј3ЛщКҫЎЈЙи Ј¬ИфөұёәФШС№БҰ
Ј¬ИфөұёәФШС№БҰ MPaКұЈ¬
MPaКұЈ¬ Ј¬
Ј¬ Ј»ФтөұёәФШС№БҰ
Ј»ФтөұёәФШС№БҰ КұЈ¬
КұЈ¬ Ј¬
Ј¬ Ј»өұёәФШС№БҰ
Ј»өұёәФШС№БҰ КұЈ¬
КұЈ¬ Ј¬
Ј¬ ЎЈ
ЎЈ
УЙНј2әННј3ҝЙЦӘЈә°СҝХФШөұіЙ»щұҫЧҙМ¬Ј¬өұТәС№ёЧКЬС№КұЈ¬ХэПтёәФШБчБҝРұВКјхРЎЈ¬·ҙПтёәФШБчБҝРұВКФцҙуЈ»өұТәС№ёЧКЬАӯКұЈ¬ХэПтёәФШБчБҝРұВКФцҙуЈ¬·ҙПтёәФШБчБҝРұВКјхРЎЎЈ
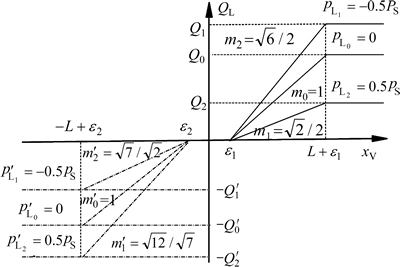
Нј2 ёәҝӘҝЪЛАЗшёәФШБчБҝМШРФЗъПЯ
Fig. 2 Load flow property curves of an overlapped valve
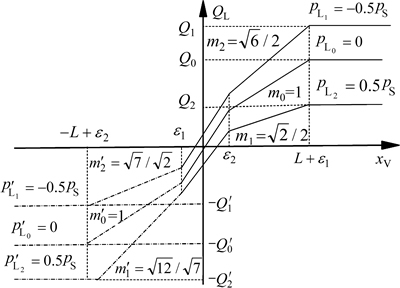
Нј3 ХэҝӘҝЪЛАЗшёәФШБчБҝМШРФЗъПЯ
Fig. 3 Load flow property curves of underlapped valve
3 КөСй·ЦОц
КөСйМЁТәС№ПөНіФӯАнНјИзНј4ЛщКҫЎЈХыМе°ьАЁ2Іҝ·ЦЈ¬·ЦұрОӘұИАэ·§ҝШЦЖөДЗэ¶ҜПөНіәНұИАэТзБч·§ҝШЦЖөДёәФШПөНіЎЈТәС№ёЧҪшіцУН№ЬөА¶јЧ°УРС№БҰҙ«ёРЖчЈ¬јмІвТәС№ёЧБҪЗ»С№БҰЎЈЗэ¶ҜІҝ·ЦөзТәұИАэ·§ІЙУГөДКЗ°ўНРЖЪATOSөДDLHZO-TE-040-L71/IЈ¬·§РҫОӘХэҝӘҝЪЈ»ёәФШІҝ·ЦТәС№ёЧБҪЗ»·ЦұрІЙУГ°ўНРЛ№ATOSөДRZMO-AE-30/100/IұИАэТзБч·§Ј¬НЁ№эөчҪЪұИАэТзБч·§ТзБчС№БҰАҙЙи¶ЁПөНіөДёәФШС№БҰЎЈ
өчҪЪПөНіС№БҰОӘ7 MPaЈ¬ёәФШ»ШВ·Йи¶ЁІ»Н¬өДёәФШС№БҰЧҙМ¬(-1.5Ј¬0Ј¬2.0әН3.0 MPa)Ј¬ФЪГҝёцёәФШС№БҰЧҙМ¬ПВЈ¬ІвКФұИАэ·§І»Н¬ҝӘҝЪ¶ИКұ·З¶ФіЖТәС№ёЧ»оИыёЛФЛ¶ҜөДЛЩ¶ИЎўБҪЗ»өДС№БҰЎЈУЙУЪКөСйМхјюПЮЦЖЈ¬Ҫц¶Ф30%ТФДЪөД·§ҝЪҝӘ¶ИҪшРРКөСйЎЈ
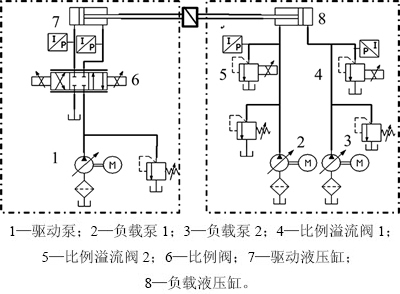
Нј4 КөСйПөНіТәС№ФӯАнНј
Fig. 4 Hydraulic principle diagram of experimental system
ұИАэ·§ФЪІ»Н¬өДёәФШС№БҰЧҙМ¬ПВЈ¬ТәС№ёЧөДёәФШБчБҝЛжҝӘҝЪ¶Иұд»ҜИзНј5ЛщКҫЎЈ
·§ҝӘҝЪФЪ-4%~7%·¶О§ДЪЈ¬ёәФШБчБҝЗъПЯРұВКІ»ОИ¶ЁЈ¬Бч¶ҜЗйҝцұИҪПёҙФУЈ¬ҙЛЗшУтОӘұИАэ·§ЛАЗшІҝ·ЦЈ»ФЪі¬№эЛАЗшәЬРЎөД·¶О§ДЪ(-12%~-4%Ј¬7%~15%)Ј¬УЙУЪ·§ЛАЗш·З¶ФіЖ( )Ј¬БчБҝЗъПЯөДРұВК»әВэұд»ҜЈ¬ХвЦЦУЙ·§ЛАЗшҪб№№·З¶ФіЖТэЖрөДБчБҝРұВКұд»ҜЗшУтіЖОӘ·§өД·З¶ФіЖЗшЈ»ЛАЗшәН·З¶ФіЖЗшёәФШБчБҝұд»Ҝ¶јКЗ·ЗПЯРФөДЎЈФҪ№эЛАЗшәуЈ¬өұҝӘҝЪі¬№эЛАЗшІоЦө
)Ј¬БчБҝЗъПЯөДРұВК»әВэұд»ҜЈ¬ХвЦЦУЙ·§ЛАЗшҪб№№·З¶ФіЖТэЖрөДБчБҝРұВКұд»ҜЗшУтіЖОӘ·§өД·З¶ФіЖЗшЈ»ЛАЗшәН·З¶ФіЖЗшёәФШБчБҝұд»Ҝ¶јКЗ·ЗПЯРФөДЎЈФҪ№эЛАЗшәуЈ¬өұҝӘҝЪі¬№эЛАЗшІоЦө 3ұ¶ТФЙПКұЈ¬·§Ҫб№№өД·З¶ФіЖУ°ПмТтЛШҝЙТФәцВФЈ¬БчБҝЗъПЯөДРұВКұИҪПОИ¶ЁЈ¬іЖОӘ·§өДПЯРФЗшУтЎЈёәФШБчБҝөДұИАэМШРФҪцұнПЦФЪПЯРФЗшУтЈ¬ЛщТФЈ¬ҪцФЪұИАэ·§ҝӘҝЪОӘ-30%~-8%әН8%~30%·¶О§ДЪ·ЦОц№ШУЪёәФШС№БҰәНёәФШБчБҝұИЦөөДКөСйҪб№ыЎЈ
3ұ¶ТФЙПКұЈ¬·§Ҫб№№өД·З¶ФіЖУ°ПмТтЛШҝЙТФәцВФЈ¬БчБҝЗъПЯөДРұВКұИҪПОИ¶ЁЈ¬іЖОӘ·§өДПЯРФЗшУтЎЈёәФШБчБҝөДұИАэМШРФҪцұнПЦФЪПЯРФЗшУтЈ¬ЛщТФЈ¬ҪцФЪұИАэ·§ҝӘҝЪОӘ-30%~-8%әН8%~30%·¶О§ДЪ·ЦОц№ШУЪёәФШС№БҰәНёәФШБчБҝұИЦөөДКөСйҪб№ыЎЈ
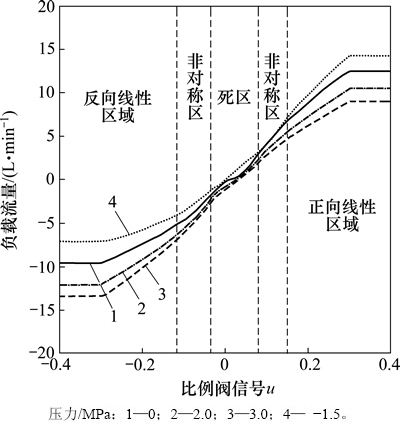
Нј5 ұИАэ·§С№БҰБчБҝМШРФКөСйЗъПЯ
Fig. 5 Load flow curves of experiment
Нј6ЛщКҫОӘКөСйІвөГөДІ»Н¬ҝӘҝЪ¶ИКұөДёәФШС№БҰЎЈёәФШС№БҰЙиЦГЦөОӘ-1.5Ј¬0Ј¬2.0әН3.0 MPaЎЈУЙУЪТәС№ёЧФЛ¶Ҝ№эіМҙжФЪДҰІБөИУ°ПмТтЛШЈ¬ёәФШС№БҰУлЙи¶ЁөДёәФШУРТ»¶ЁІоЦөЎЈУЙНј6ҝЙЦӘЈәФЪН¬Т»Йи¶ЁС№БҰПВЈ¬І»Н¬ҝӘҝЪ¶ИКұөДёәФШС№БҰ»щұҫұЈіЦТ»ЦВЈ¬·ыәПКөСйТӘЗуЎЈ
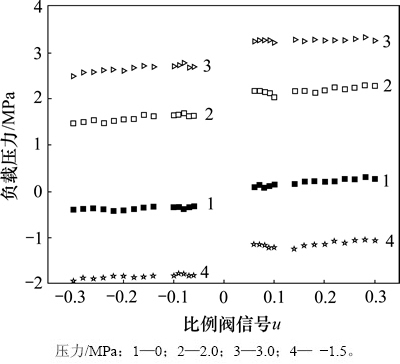
Нј6 КөСйёәФШС№БҰұд»ҜЗъПЯ
Fig. 6 Change curves of load pressure in experiment
ёщҫЭНј6ЛщКҫөДёәФШС№БҰәНКҪ(13)јЖЛгАнВЫөДёәФШБчБҝұИЈ¬ёщҫЭНј5ЛщКҫКөСйІвөГөДКөјКёәФШБчБҝјЖЛгКөјКёәФШБчБҝұИЈ¬Ҫ«АнВЫёәФШБчБҝұИәНКөјКёәФШБчБҝұИҪшРРұИҪПЎЈФЪІ»Н¬өДёәФШС№БҰЧҙМ¬ПВЈ¬ёәФШБчБҝөДАнВЫұИәНКөјКұИИзНј7ЛщКҫЈ¬АнВЫәНКөјКёәФШБчБҝұИөДПа¶ФОуІоИзНј8ЛщКҫЎЈ
·ЦОцНј8ҝЙЦӘЈәФЪұИАэ·§өДПЯРФЗшУтЈ¬АнВЫөДёәФШБчБҝұИУлКөјКұИұИҪПҪУҪьЈ¬ЧоҙуПа¶ФОуІоФЪ6%ТФДЪЈ¬ІўЗТөұҝӘҝЪ¶ИҙуУЪ20%КұЈ¬Па¶ФОуІоУРјхРЎЗчКЖЈ¬ФЪҝӘҝЪ¶ИОӘ30%КұЈ¬АнВЫёәФШБчБҝұИУлКөјКёәФШБчБҝұИ»щұҫПаөИЈ¬Па¶ФОуІоФЪ3%ТФДЪЈ»өұС№БҰОӘ3.0 MPaКұПа¶ФОуІоұИ2.0 MPaКұөДҙуЎЈУЙКҪ(12)ҝЙЦӘЈ¬УЙУЪёәФШС№БҰФцҙуЈ¬ПөНіөДС№БҰәНёәФШС№БҰІЁ¶ҜЎўУНПдөДС№БҰ¶ФКөјКөДёәФШБчБҝУ°ПмФцҙуЈ¬ЛщТФПа¶ФОуІоФцҙуЎЈ
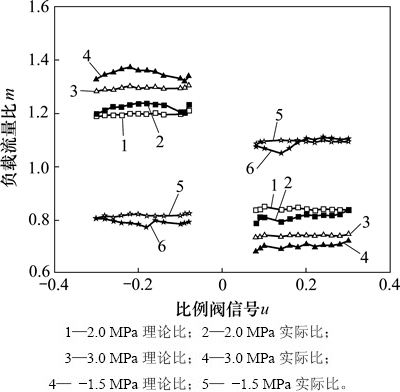
Нј7 І»Н¬ёәФШЧҙМ¬өДАнВЫұИәНКөјКұИ¶ФұИЗъПЯ
Fig. 7 Contrast curves of theoretical value and actual value under variable load situation
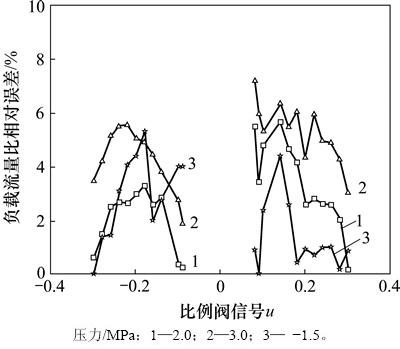
Нј8 І»Н¬ёәФШЧҙМ¬өДёәФШБчБҝұИПа¶ФОуІо
Fig. 8 Relative error of load flow proportion value under variable load situation
4 ҪбВЫ
1) ЛжЧЕјхРЎЈ¬ёЧөДІ»¶ФіЖРФФҪҙуЈ¬ПөНіөДІ»¶ФіЖМШРФФцЗҝЎЈЛжЧЕС№БҰёәФШФцјУЈ¬ПөНіөД·З¶ФіЖРФПИјхИхәуФцЗҝЈ»ЛжЧЕАӯБҰёәФШФцјУЈ¬ПөНіөД·З¶ФіЖРФФцЗҝЎЈ
2) өГөҪБЛІ»Н¬ёәФШЧҙМ¬КұХэПтёәФШБчБҝұИmiәН·ҙПтёәФШБчБҝұИ ЎЈөұТәС№ёЧКЬС№КұЈ¬ХэПтёәФШБчБҝЗъПЯРұВКјхРЎЈ¬·ҙПтёәФШБчБҝЗъПЯРұВКФцҙуЈ»өұТәС№ёЧКЬАӯКұЈ¬ХэПтёәФШБчБҝЗъПЯРұВКФцҙуЈ¬·ҙПтёәФШБчБҝЗъПЯРұВКјхРЎЎЈёәФШБчБҝұИ(РұВКұИ)ҝЙТФёщҫЭПөНіІОКэЎўәНpLЧјИ·јЖЛгЎЈ
ЎЈөұТәС№ёЧКЬС№КұЈ¬ХэПтёәФШБчБҝЗъПЯРұВКјхРЎЈ¬·ҙПтёәФШБчБҝЗъПЯРұВКФцҙуЈ»өұТәС№ёЧКЬАӯКұЈ¬ХэПтёәФШБчБҝЗъПЯРұВКФцҙуЈ¬·ҙПтёәФШБчБҝЗъПЯРұВКјхРЎЎЈёәФШБчБҝұИ(РұВКұИ)ҝЙТФёщҫЭПөНіІОКэЎўәНpLЧјИ·јЖЛгЎЈ
3) ФЪПөНіМШРФАнВЫ·ЦОцөД»щҙЎЙПЈ¬НЁ№эКөСйЈ¬СйЦӨБЛФЪН¬Т»ЎўІ»Н¬ёәФШЧҙМ¬ПВёәФШБчБҝұИөДХэИ·РФЈ¬ОӘөзТәұИАэ·§ҝШ·З¶ФіЖёЧПөНі·З¶ФіЖҝШЦЖМṩБЛҝЖС§ТАҫЭЎЈ
ІОҝјОДПЧЈә
[1] LI K, MANNAN M A, XU M. Electro-hydraulic proportional control of twin-cylinder hydraulic elevators[J]. Control Engineering Practice, 2001, 9(4): 367-373.
[2] VAN OIJEN N, KOMSTA J, ANTOSZKIEWICZ P. Integral sliding mode compensator for load pressure control of die-cushion cylinder drive[J]. Control Engineering Practice, 2013, 21(5): 708-718.
[3] YANG Huayong, SHI Hu, GONG Guofang. Electro-hydraulic proportional control of thrust system for shield tunneling machine[J]. Automation in Construction, 2009, 18(7): 950-956.
[4] Р춫№в, ОвКўБЦ, ХФҝЛ¶Ё. ·§ҝШ·З¶ФіЖёЧО»ЦГЛЕ·юПөНіХэ·ҙПтЛЩ¶ИМШРФөДАнВЫ·ЦОцј°КФСйСРҫҝ[J]. ТәС№УлЖш¶Ҝ, 2005(6): 35-39.
XU Dongguang, WU Shenglin, ZHAO Keding. The theoretical analysis and experimental study about the position servo system of valve controlled single-rod cylinder[J]. Chinese Hydraulics and Pneumatics, 2005(6): 35-39.
[5] АоәйИЛ, Нх¶°Бә, АоҙәЖј. ·З¶ФіЖёЧөзТәЛЕ·юПөНіөДҫІМ¬МШРФ·ЦОц[J]. »ъРө№ӨіМС§ұЁ, 2003, 39(2): 18-22.
LI Hongren, WANG Dongliang, LI Chunping. Static property analysis of electrohydraulic single rod cylinder servo systems[J]. Chinese Journal of Mechanical Engineering, 2003, 39(2): 18-22.
[6] №Шҫ°М©, НхәЈұх, ЦЬҝЎБъ. ·З¶ФіЖ·§ҝШЦЖ·З¶ФіЖёЧөД¶ҜМ¬МШРФ[J]. Н¬јГҙуѧѧұЁ(ЧФИ»ҝЖС§°ж), 2001, 29(9): 1130-1134.
GUAN Jingtai, WANG Haibing, ZHOU Junlong. Dynamic characteristic analysis of unsymmetrical cylinder controlled by unsymmetrical valve[J]. Journal of Tongji University (Natural Science), 2001, 29(9): 1130-1134.
[7] М·За, №ЁҪш, ХЕРВәЈ. Л«·§РҫҝШЦЖ·З¶ФіЖёЧПөНіөД¶ҜМ¬МШРФСРҫҝ[J]. »ъРөЙијЖ, 2010, 27(12): 37-41.
TAN Qing, GONG Jin, ZHANG Xinhai. Research on dynamic characteristic of dual spool controlled asymmetric cylinder[J]. Journal of Mechanic Design, 2010, 27(12): 37-41.
[8] АоәйИЛ, №Ш№г·б, №щәйІЁ. ҝјВЗ·§ҝЪОуІоөД·§ҝШ·З¶ФіЖТәС№ёЧПөНіҪЁДЈ, ·ВХжУлКФСй[J]. »ъРө№ӨіМС§ұЁ, 2007, 43(9): 33-39.
LI Hongren, GUAN Qinfeng, GUO Hongbo. Modeling, simulation and experiment on valve controlled asymmetry poison considering valve port error[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 33-39.
[9] Соҫьәк, ТьЧФЗҝ, АоКҘвщ. ·§ҝШ·З¶ФіЖёЧөД·ЗПЯРФҪЁДЈј°Жд·ҙАЎПЯРФ»Ҝ[J]. »ъРө№ӨіМС§ұЁ, 2006, 42(5): 203-207.
YANG Junhong, YIN Ziqiang, LI Shengyi. Nonlinear modelling and feedback linearization of valve-controlled asymmetrical cylinder[J]. Chinese Journal of Mechanical Engineering, 2006, 42(5): 203-207.
[10] ВАФЖбФ. ·§ҝШ·З¶ФіЖёЧЖөУтҪЁДЈ[J]. »ъРө№ӨіМС§ұЁ, 2007, 43(9): 122-126.
L Yunsong. Modeling in frequency domain for valve controlled asymmetric hydraulic cylinders[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 122-126.
Yunsong. Modeling in frequency domain for valve controlled asymmetric hydraulic cylinders[J]. Chinese Journal of Mechanical Engineering, 2007, 43(9): 122-126.
[11] ХЕ·Й, іВҪЁЦР, ЕнҝӘПг. ТәС№О»ЦГҝШЦЖПөНіөДЧФККУҰІ№іҘ[J]. »ъРө№ӨіМС§ұЁ, 2005, 41(5): 94-97.
ZHANG Fei, CHEN Jianzhong, PENG Kaixiang. Adaptation compensation of hydraulic servo control system[J]. Chinese Journal of Mechanical Engineering, 2005, 41(5): 94-97.
[12] НхСТ, ХЕПюДю, ё¶УАБм. ·З¶ФіЖТәС№ёЧ¶ФіЖРФҝШЦЖ[J]. ұұҫ©әҪҝХәҪМмҙуѧѧұЁ, 2007, 33(11): 1134-1139.
WANG Yan, ZHANG Xiaoning, FU Yongling. Symmetric control of asymmetric cylinder[J]. Journal of Beijing University of Aeronautics and Astronautics, 2007, 33(11): 1134-1139.
[13] LEANDRO C, MAURO A. Adaptive cascade control of a hydraulic actuator with an adaptive dead-zone compensation and optimization based on evolutionary algorithms[J]. Expert Systems with Applications, 2011, 38(10): 12262-12269.
[14] CHENG Guan, PAN Shuangxia. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters[J]. Control Engineering Practice, 2008, 16(11): 1275-1284.
[15] °Чә®, №ЬіЙ, ·лЕа¶ч. өзТәұИАэПөНіұдВЫУтЧФККУҰДЈәэ»¬ДЈҝШЦЖ[J]. өз»ъУлҝШЦЖС§ұЁ, 2009, 13(5): 728-733.
BAI Han, GUAN Chen, FENG Peien.Adaptive fuzzy sliding-mode control with variable universe for electrohydraulic proportional system[J]. Electric Machines and Control, 2009, 13(5): 728-733.
[16] WILSON B H, ERYILMAZ B. Unified modeling and analysis of a proportional valve[J]. Journal of the Franklin Institute, 2006, 343(1): 48-68.
(ұајӯ іВІУ»Ә)
КХёеИХЖЪЈә2015-07-13Ј»РЮ»ШИХЖЪЈә2015-09-09
»щҪрПоДҝ(Foundation item)Јә№ъјТЦШөг»щҙЎСРҫҝ·ўХ№јЖ»®(973јЖ»®)ПоДҝ(2014CB049405)Ј»№ъјТҝЖјјЦШҙуЧЁПо(2009ZX04005-031)Ј»ёЯРФДЬёҙФУЦЖФм№ъјТЦШөгКөСйКТЧФЦчМҪЛч»щҪрЧКЦъПоДҝ(zzyjkt2013) (Project(2014CB049405) supported by the National Basic Research Program (973 Program) of China; Project(2009ZX04005-031) supported by the National Science and Technology Major Special; Project(zzyjkt2013) supported by the State Key Laboratory of High Performance Complex Manufacturing)
НЁРЕЧчХЯЈәМ·ҪЁЖҪЈ¬ҪМКЪЈ¬І©КҝЙъөјКҰЈ¬ҙУКВ»ъөзТәјҜіЙҝШЦЖАнВЫУлјјКхУҰУГСРҫҝЈ»E-mail: jptan@163.com

