���±�ţ�1004-0609(2016)-08-1711-10
Сʱ��Ӱ���µ��½�����ɽ�˻���ȫϵͳ��̬�ݻ���������
����ȫ������ޣ��� ΰ���� ��
(���ϴ�ѧ ��Դ�밲ȫ����ѧԺ����ɳ 410083)
ժ Ҫ��Ϊ̽�����½�����ɽ���ɹ����������˺��¹�Ƶ�����շ����أ���������ˮƽ��ȫˮƽ��Сʱ��Ӱ���ԣ�����Сʱ��Ӱ���µ��½�����ɽ�����˻�ϵͳ�������밲ȫ�Եķ����Զ�̬�ݻ�ģ�͡��Ը��ݻ�ģ�������е���ѧ�����Ͷ�̬�ݻ������о�����Ϻõ���֤������ģ�͵���Ч�ԣ����Ե��½�����ɽ�����˻���ȫ�����Զ�̬�ݻ��������ƶ��Է���������ʾ��4����̬����������ˮƽ�밲ȫˮƽ��������ݻ�ģʽ������Ϊ���½�����ɽ�����˻���ȫϵͳ�İ�ȫ����������ṩ���ݡ�
�ؼ��ʣ����½�����ɽ��Сʱ�ͣ��˻���ȫϵͳ����̬�ݻ�����
��ͼ����ţ�X936���� ���ױ�־�룺A
���ڵ��½�����ɽ���ɰ�ȫ���ԣ����þ�̬��ȫ���۷���һ��ֻ��˵���䰲ȫ��ָ�괦��ij�ַ�Χ��������������ʾ���½�����ɽ���ɰ�ȫ��̬�ݻ����̵Ķ�̬�ݻ����ɣ�������ʵ�ʹ����о�̬��ȫ���ۡ���ȫ�����Լ��¹��ʲ��Ǻϵ�������[1]������̬�ݻ��������ǹ��ڻ��ڷǽ����ԡ�����Ϊ�����ԭ����һ�����ݽ�����Ϊ�����ķ����Զ�̬�Ǿ�����ݻ����̵�����[2-3]��
�ҹ����½�����ɽ���ɰ�ȫ��������Զ�ͺ����ִ������ý���IJ��������½�����ɽ���ɹ�������Ա�˺��¹�Ƶ���밲ȫ������������ͻ��[4-5]����ˣ������Ч������½�����ɽ���ɵ��˺��¹����⣬�ǹ�������ɽ��ȫ���������̼�����Ա�̲��ݻ��Ŀ���[6]�������Ч̽�����½�����ɽ���ɹ����������˺��¹�Ƶ�����շ����ؾ����ǻ�е�豸������������������Ե�ʮ�ֽ��ȣ����˻���ȫ����ѧԭ����Ϊ��ϵͳ�Ĺ۵�����Ե��½�����ɽ���ɹ����������˺��¹�Ƶ������������ʶ[7-8]������Ч�ؿ˷�Ƭ����[9]������Ϊ������еİ�ȫ�Բ��ṩ�ܺõ�˼·[10]��
������֪�����½�����ɽ���ɹ����������Զ�ȫ�Ե����û�Ӱ������ʱ�����õģ��������Եı仯����һ����ʱ���ڲ����ڰ�ȫ�������ֳ�������ˣ����б�Ҫ���Dz�ͬʱ�ʹ�С�Ե��½�����ɽ�����˻���ȫ��̬�ݻ���Ӱ��[11-12]��������ʱ���ַ����� ��[13-14]������ͬʱ�ʹ�Сʱ��Ӱ���µ��½�����ɽ�����˻���ȫ��̬�ݻ�ģ�͡�Ϊ��ʧһ���ԣ��������߽����о�Сʱ�ͶԵ��½�����ɽ�����˻���ȫ��̬�ݻ���Ӱ�죬����Сʱ��Ӱ���µ��½�����ɽ���ɰ�ȫ��̬�ݻ��������Ӷ�Ϊ��Ч��ʾСʱ��Ӱ���µ��½�����ɽ���ɰ�ȫ��̬�ݻ������ĵ춨��ʵ�����ۻ�����
1 ���½�����ɽ���ɰ�ȫ�˻�ϵͳ����
1.1 ���½�����ɽ���ɹ����˻�ϵͳ��ʶ
��20�����������½�����ɽ����װ���ںܴ�̶���ʵ�����컯��Һѹ������������ͻ����Զ����������ܻ�����չ������[15]���ڵ��½�����ɽ���ɹ����У��˺Ϳ���װ����ɵ��˻�ϵͳ����ˮƽ������������ߵ��½�����ɽ���ɲ��������������ɱ������ƿ��ɰ�ȫ������������ʵ���е��ֶΡ�һ����ԣ����½�����ɽ�����˻�ϵͳ��Ҫ������-���ϵͳ����-�ܵ�����װ��ϵͳ����-��������װ��ϵͳ����-���˻�ϵͳ����-Һѹ����̨��ϵͳ����-����ϵͳ����-֧��ϵͳ����-��ʯװ��ϵͳ����-װҩ̨��ϵͳ�ȣ���Щ�˻�ϵͳ��ҵ�ֿɷֽ�Ϊ�����ҵ������ͣ����ҵ��ά�ޱ�����ҵ����ʻ��ҵ�Ϳ�����ҵ�ȣ���ͼ1��ʾ��
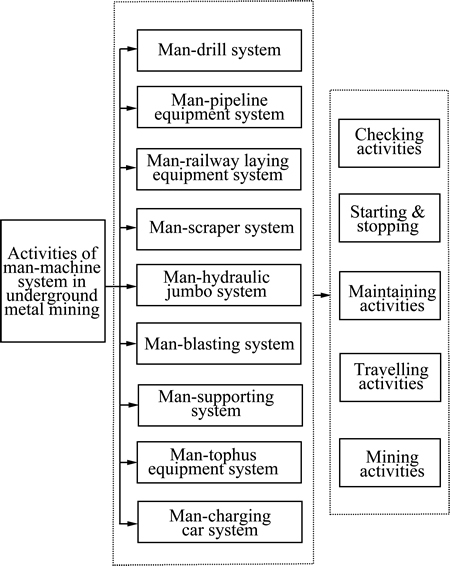
ͼ1 ��������Դ���¿����˻�����ϵͳ
Fig. 1 Human-machine environment system of underground metal resources mining
���½�����ɽ�����˻�ϵͳ����ɵ�������ϵͳ(������ϵͳ�ͻ���ϵͳ)�и��Ե��ص㡣��ˣ��Ե��½�����ɽ���ɰ�ȫ�¹ʵķ������ܼ���Ӧ�ӿ����˻�ϵͳ�ĽǶȳ�����ȡ��Ч�İ����Բߡ�������ϵͳ������ʱ������ϵͳ�Ŀɿ���ΪR1������ϵͳ�Ŀɿ���ΪR2������½�����ɽ�����˻�ϵͳ�Ŀɿ���Rs�ɱ�ʾΪ
Rs=R1R2 (1)
1.2 ���½�����ɽ���ɰ�ȫ�¹ʷ������������
1.2.1 �˻�����ϵͳ��Ϣͨ�������Ե����˵�ʧ��
���½�����ɽ�����˻�ϵͳ����Ϣͨ���ǵ���ģ���������ϵͳ�����ϵͳ�´�ָ�������ϵͳ����Ϣ����[16]��������ϵͳ���ֹ���ʱ�����½�����ɽ�����˻�ϵͳ�����ɵ�����ĵ���·�ṹ��ʹ���½�����ɽ��������ϵͳ���ڲ���״����1) ��Ϣ�����ٶȴ�ͣ�2) ͬʱ�жϴ����������Ϲ�����Ϣ������ɥʧ��3) ʹ����ϵͳæ�ң����ܴ�����������µĶ����жϣ�4) ������ͻȻ���ֵ��쳣�����������쳣��ʱ�����½�����ɽ��������ϵͳ�е�����ϵͳ������������Ȼ�����롰��ɵ��״����
1.2.2 �˻�����ϵͳ���˵ľ�����ɥʧ
���½�����ɽ��������ϵͳ�ڲ��������У���˼ά���жϼ���Ϣ�������������ض��ĵ��½�����ɽ�����˻�����������ƥ�䡣��ν�˵ľ�����ɥʧ��ָ����ϵͳ���������Լ��ĵ��½�����ɽ�����ض����������ڵ��½�����ɽ���������ֳ����ԣ��ڲ��������������Լ�ʪ�Ȼ���������Ӱ���£�������Աÿ����������4~5 h�����������������������У����ײ���������������ƣ�ͣ�ʹ������ʶˮƽ�½���������ע������ɢ���Ӷ����������ʱ���������Ե��½�����ɽ��������ϵͳ����Ϊ�������Ե�֪�����ڵ��½�����ɽ���ɻ���ϵͳ����������������������Ƶ����ͬ����ʹ����ϵͳ�����������������ֵ�ͬ��ЧӦ��һ������ϵͳֹͣ����������ϵͳ���������ʧƽ�⣬��ʹ����ϵͳ�ľ�����ɥʧ���Ӷ����ս���������ϵͳʧ��
2 Сʱ��Ӱ��ĵ��½�����ɽ���ɰ�ȫ��̬�ݻ�ģ��
2.1 Сʱ��Ӱ��ĵ��½�����ɽ�����˻���ȫ��̬�ݻ�ģ�ͽ���
�����½�����ɽ�����˻�ϵͳ�е���Ա���ڸ߰�ȫ��ʱ���������ײ�����и�У��Ӷ���ʹ���������������յ��µ��½�����ɽ�����˻�ϵͳ��ȫ�Խ��ͣ��෴�������½�����ɽ�����˻�ϵͳ�е���Ա���ڵͰ�ȫ��ʱ����������������ʹ�����Խ��͡�Ҳ����˵�����½�����ɽ�����˻�ϵͳ�еİ�ȫ���������������֯������õķ�������ص�����������
Ϊ�������½�����ɽ���ɰ�ȫ��̬�ݻ�ģ�ͣ����������¼��衣
1) ��������ȫ����[13]�����ʱ�̵��½�����ɽ�����˻�ϵͳ�İ�ȫˮƽֵ������ˮƽֵ�ֱ�Ϊx(��)��y(��)����x(��)��y(��)�������������ԣ��� x(��)Խ����������½�����ɽ�����˻�ϵͳ��ȫˮƽԽ�ߣ�x(��)ԽС����������½�����ɽ�����˻�ϵͳ��ȫˮƽԽ�ͣ��� y(��)Խ���½�����ɽ�����˻�ϵͳ�ľ�����Խ�ͣ�˼����и����Ϊ�����̶�Խ�ߣ�y(��)ԽС�����½�����ɽ�����˻�ϵͳ�ľ�����Խ�ߣ�˼����и����Ϊ�����̶�Խ�͡�
2) ����½�����ɽ�����˻�ϵͳ�İ�ȫˮƽ������ˮƽ�����������ʷֱ�Ϊa1(����a1��0)��b1(����b1��0)��
3) ���½�����ɽ���ɻ�����ȫˮƽ������ˮƽ����ֵ�ֱ�ΪM(��M��0)��m(��m��0)������m��M��
���ǵ�����ˮƽ��ȫˮƽ��Ӱ�����ʱ�ͦ�0�������ʱ��ʱ����ˮƽy(��)��ȫˮƽ�ݻ��ٶ�dx(��)/d�ӵ�Ӱ��Ϊ-a2y(��-��0)��ͬʱ���ڦ�ʱ�̣����½�����ɽ���ɰ�ȫ��״̬�ݻ��ٶ�dx(��)/d�ӻ��ܵ���ȫˮƽx(��)�Լ���ȫˮƽ�仯����[1-x(��)/M]��������ã�����½�����ɽ���ɰ�ȫ��״̬�ݻ��ٶ�dx(��)/d�ӿɱ�ʾΪ
 (2)
(2)
ʽ�У�a2Ϊ�����Զ�ȫ��Ӱ��ϵ������a2��0��
��ʽ(2)�ɿ�������ȫˮƽ����������a1����Ч������ȫˮƽ�����ٶ��뼴ʱ��ȫˮƽ����ȫˮƽ�仯����֮������Թ�ϵ��a1Խ����˵����ʱ��ȫˮƽ����ȫˮƽ�仯���ƶ�ȫˮƽ�����ٶȵ����Ӱ������Խ�������Զ�ȫ��Ӱ��ϵ��a2�ɽϺõ������������밲ȫˮƽ�����ٶ�֮������Թ�ϵ��a2Խ����˵�������Զ�ȫ��Ӱ������Խ��
���⣬���ʱ��ʱ����ˮƽy(��)������ˮƽ�ݻ��ٶ�dy(��)/d�ӵ�Ӱ��Ϊ-b2y(��)������ʱ��ʱ��ȫˮƽx(��)������ˮƽ�ݻ��ٶ�dy(��)/d�ӵ�Ӱ��Ϊb1[m-x(��)]x(��)������½�����ɽ����������״̬�ݻ��ٶ�dy(��)/d�ӿɱ�ʾΪ
 (3)
(3)
ʽ�У�b2Ϊ����ϵ������b2��0��
ʽ(3)����������ˮƽ����������b1����Ч���������Ե������ٶ�����ڵ�����ˮƽ��ֵm�Ͱ�ȫˮƽx(��)�IJ�ֵ�Լ���ȫˮƽx(��)���������֮������Թ�������x(��)��m����ζ�ŵ��½�����ɽ���ɰ�ȫ�Բ��㣬��ʱ����ˮƽ�氲ȫˮƽx(��)����������ǿ����x(��)��mʱ����ζ�ŵ��½�����ɽ���ɰ�ȫ�Եõ���ּ�ǿ����ʱ������ˮƽ�氲ȫˮƽx(��)�����������͡���ģ���������Ե���ϵ��b2�ɶԵ��½�����ɽ������Ա�����Ե������ٶ��뾯��ˮƽ֮�������еĸ����Թ�ϵ������Ч��������������Խ�ߣ�������ˮƽ����Խ������
��Ȼ��ʽ(2)��(3)��ʾ����ѧģ���ܶԵ��½�����ɽ���ɹ��̵İ�ȫ�Ժ�������֮��Ķ�̬�ݻ���ϵ�Լ���̬�ݻ����ɽ�����Ч��������
��u(��)=x(��)/M��v(��)=y(��)/M��a2t=�ӣ���ʽ(2)��(3)���οɵ�
 (4)
(4)
��a=a1/a2��b=b2/a2��c=b1��M/a2��d=m/M�������Ӹ�дΪt������0��Ϊt0����u(��)=u(t)��v(��)=v(t)����ʽ(4)��ʾ�ij��ַ�����ɱ���Ϊ
 (5)
(5)
��Ȼ��ʽ(4)��ʾ�ij��ַ������ʽ(2)��ʽ(3)��ʾ�ij��ַ��̵���ͼ����ͬ��[17]��
2.2 Сʱ�͵��½�����ɽ���ɰ�ȫ��̬�ݻ�ģ����ѧ����
����(a1+b2)2/(4a2b1)��m��M(��(a+b)2/(4c)��d��1)�������Ե��½�����ɽ���ɰ�ȫ��̬�ݻ�ģ�ͽ�����ѧ������
����1 �����ַ�����(5)��a��b�����ַ�����(5)�ޱչ죬�������ڽ⡣
֤������u(t)=u��v(t)=v��ȡDulac����B(u, v)= e(ku+lv)�����ǵ���0��С����

 (6)
(6)
��v(t-t0)�ڵ�t����̩��չ��ʽչ������
v(t-t0)=v(t)-t0dv(t)/dt�� (7)
��ʽ(7)����ʽ(6)�ɵ�



 (8)
(8)
��ka+cld-2a+kt0cd=0��k+bl+kt0b=0���������ɵ�k=-2ab/(cd-ab)��l=2a(t0b+1)/(cd-ab)��
����
 (9)
(9)
��(a1+b2)2/(4a2b1)��m��M(��(a+b)2/(4c)��d��1)���ʵ�cd��ab��
����ak+cl+kt0c=2a(c-ab)/(cd-ab)��2a(cd-ab)/ (cd-ab)��0���ʵ�a��bʱ������D��0���ȺŽ���a=b��u=0ʱ���֣���Dulac���֪�����ַ�����(5)�ޱչ죬�������ڽ⡣��ˣ�����1֤�ϡ�
����2 ���ַ�����(5)�������������(0��0)��(u0��v0)(����u0=(ab-cd)/(ab-c)��v0=cu0(d-u0)/b��(u0��v0)�ڵ�һ�����ڣ��ǰ��㣻(0��0)���ȶ��ֽ���(a��b-t0cdʱ)��
��ʽ(7)���볣�ַ�����(5)����������ɵ�
 (10)
(10)
��du(t)/dt=0��dv(t)/dt=0����Ϊ������ʡȥ����t����u(t)=u��v(t)= v������
 (11)
(11)
��ʽ(11)�ɵ�u0=(ab-cd)/(ab-c)��v0=cu0(d-u0)/b)������cd��ab��d��1������c��ab����Ȼ��u0=(ab-cd)/(ab-c)��0��
(ab-cd)/(ab-c)-d=(cd-ab)/(c-ab)-d=ab(d-1)/(c-ab)��0������u0=(ab-cd)/(ab-c)��d����ˣ���Ȼ��v0=cu0(d-u0)/b��0����(u0��v0)�ڵ�һ�����ڡ�
���=u-u0����=v-v0����ʽ(10)���
 (12)
(12)
ʽ(12)�����Խ���ϵͳ����������Ϊ
 (13)
(13)
��ʽ(13)�����ɵ�
��2+[b-(a+t0cd-2u0a-2u0t0c)]��-b(a+t0cd-2u0a-2u0t0c)+c(1+bt0)(d-2u0)=0 (14)
�������-b(a+t0cd-2u0a-2u0t0c)+c(1+bt0) (d-2u0)=-ab+2u0ab+cd-2u0c=cd-ab+2u0(ab�Cc)=cd-ab+2[(ab-cd)/(ab-c)](ab�Cc)=cd-ab+2(ab-cd)=ab-cd��0��
ʽ(12)�����Խ���ϵͳ���������̵������������ʵ������(u0��v0)Ϊ��һ�����ڵİ��㡣
�������(0��0)��ʽ(12)�����Խ���ϵͳ����������Ϊ
 (15)
(15)
��ʽ(15)��ɵ�
��2+(b-a-t0cd)��+cd-ab=0 (16)
��ʽ(16)��������Ϊ
 (17)
(17)
����(a+b)2/(4c)��d��1��cd��ab����(b-a-t0cd)2�C 4(cd-ab)��(b-a)2-4(cd�Cab)=(b+a)2-4ab�C4(cd�Cab)= (b+a)2-4cd��0����ˣ���������1����2��ʵ��Ϊ(a+t0cd-b)/2��0�Ĺ��������a��b-t0cdʱ��(0��0)Ϊ�ȶ��ֽ��㡣
����3 ���ڳ��ַ�����(5)��1) ��a=b-t0cdʱ��(0��0)���ȶ���һ��ϸ���㣻2) ��a��b-t0cdʱ��(0��0)�Dz��ȶ��ֽ��㣻3) ��0��a+t0cd-b<<1ʱ��(0��0)��Χ����Ψһ���������ǵ����ȶ�����4) ��a+t0cd-b��(a+t0c)(ab-cd)/(ab-c)ʱ��(0��0)��Χ�����ڼ�����
֤������x����u(t)����y����v(t)�����ַ�����(10)�ɱ���Ϊ
 (18)
(18)
��x=(1+t0b)S��T=bx/(1+t0b)-y�����ַ�����(18)�ɱ���Ϊ
 (19)
(19)
��Z=(ab-cd)T�����ַ�����(19)�ɱ���Ϊ
 (20)
(20)
��(dZ/dt)��(dS/dt)�ı�ֵ����

 (21)
(21)
ʽ(21)����ͬʱ����(ab-cd)1/2����ɵ�
 (22)
(22)
��W=(cd-ab)1/2Z������ʽ(22)�ɵ�
 (23)
(23)
��S�� -S��W�� -W����
 (24)
(24)
��=(a+t0cd-b)/(cd-ab)1/2��L=(a+t0c)(1+t0b)/(cd-ab)1/2��A=(c-ab)(1+t0b)/(cd-ab)��ʽ(24)�ɸ�дΪ
 (25)
(25)
1) ��a=b-t0cdʱ����=0����ʱʽ(25)Ϊʽ(26)��ʾ���ַ��������������ʽ(25)�У�a20=L��b20=A��a11=b11=a02=b02=0����һ��ϸ������G1=(a20+a02)�� (a11+2b02)-(b20+b02)(b11+2a20)= -2LA��0���ɼ�(0��0)���ȶ���һ��ϸ���㡣
 (26)
(26)
2) ��a��b-t0cdʱ��ʽ(25)�����Խ���ϵͳ����������Ϊ
��2-����+1=0 (27)
��֪a��b-t0cd��cd��ab�����Ц�=(a+t0cd-b)/ (cd-ab)1/2��0����������ʵ����/2��0�Ĺ��������(0��0)�Dz��ȶ��ֽ��㡣
3) ��Hopf�ֲ����ۿ�֪����0��a+t0cd-b<<1ʱ����(0��0)��Χ���ٴ���1���ȶ��ļ�����
ʽ(25)Ϊʽ(28)��ʾ��Ҷ��ǫ�����µĵ�2�������ϵͳ������(I=K=0)��������0��L/A(��a+t0cd-b��(a+t0c)(ab-cd)/(ab-c)ʱ)�����ַ�����(25)����������0������L/Aʱ�����������1���������������ڣ���Ϊ(0��0)��Χ�ĵ����ȶ��������ʵ�0��a+t0cd-b<<1ʱ��ʽ(25)��(0��0)��Χ����Ψһ�ĵ����ȶ�������
 (28)
(28)
2.3 Сʱ�͵��½�����ɽ�����˻���ȫ�����Զ�̬�ݻ�����
���ݽ����ĵ��½�����ɽ�����˻���ȫ�����Զ�̬�ݻ���ѧģ�ͣ�ͨ����ͼ�������ܹ����������밲ȫ�Ե�������ݻ�ģʽ���ж��Է��������������Ϊ��ȫ����������ṩ���ݡ����ݶ���1~3���ɻ�����½�����ɽ�����˻���ȫ�����Զ�̬�ݻ���ͼ(��ͼ2~4)��
��ͼ2~4����Χ�ɵ�EFGH�����У���������DBGHD�ǵ��½�����ɽ�����˻���ȫϵͳ��չ������Ӱ���������ǵ��½�����ɽ�����˻���ȫϵͳ�����������ಿ��Ϊ���½�����ɽ�����˻���ȫϵͳ����������������AC��BD�ཻ�ڰ���E2(u0��v0)����EFGH����Ϊ���½�����ɽ�����˻���ȫϵͳ��ȫ����������½�����ɽ�����˻���ȫϵͳ��ȫ��������½�����ɽ�����˻���ȫϵͳ��ȫ�����ȶ������͵��½�����ɽ�����˻���ȫϵͳ��ȫ���������������4����̬����
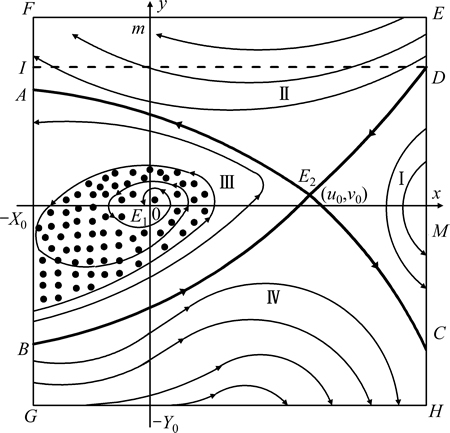
ͼ2 �ޱչ�������½�����ɽ�����˻���ȫ�����Զ�̬�ݻ�����
Fig. 2 Human-machine safety nonlinear dynamic evolution process of underground metal mining at situation of unclosed rail
1) �ޱչ����
�ɵ��½�����ɽ�����˻���ȫ��̬�ݻ�ģ�Ϳ�֪��a=a1/a2��b=b2/a2����a��b-t0cdʱ����ζ��a1��b2-b1m��0/a2�������½�����ɽ�����˻���ȫϵͳ������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮��С�������Ե���ϵ��b2����ʱ���½�����ɽ�����˻���ȫ��̬�ݻ�ģ�;���2�����E1(0��0)��E2(u0��v0)(����E2(u0��v0)Ϊ���㣬E1(0��0)Ϊ�ȶ�����)�����ޱչ죬��ͼ3��ʾ��
ͼ2������
a) ��������ڣ����������Գ̶Ƚϵͣ����½�����ɽ�����˻���ȫϵͳ��ȫˮƽ�൱�ȶ������ڼ��ޣ����зdz��õİ�ȫ��չ���ơ�b) ��������ڣ����������Գ̶Ƚϸߣ����½�����ɽ�����˻���ȫϵͳ��ȫˮƽ����ʱ��Ľ��ж����϶������տ��ܵ��µ��½�����ɽ�����˻���ȫϵͳ���������磬������½�����ɽ�����˻���ȫϵͳ��ȫˮƽ״̬���ڵ��½�����ɽ�����˻���ȫϵͳ��������ʹ������ȫˮƽ����ֵM����������ʱ������ƣ�������ʱ���ڣ����½�����ɽ�����˻���ȫϵͳ��ȫˮƽ���ڱ�����x=-X0��c) ��������ڣ����½�����ɽ�����˻���ȫϵͳ������״̬���������밲ȫˮƽ�����Ȳ��ϼ������������������뾯�衢��ȫ��Σ�յľ����E1(0��0)��d) ��������ڣ�����ʱ������ƣ����½�����ɽ�����˻���ȫϵͳ��ȫ���������õ����ϸ��ƣ������տ����ڵ��½�����ɽ�����˻���ȫϵͳ��ȫˮƽ��ֵM��
2) ����Ψһ�������
�ɵ��½�����ɽ�����˻���ȫ��̬�ݻ�ģ�Ϳ�֪����a��b-t0cdʱ����ζ��a1��b2-b1m��0/a2�������½�����ɽ�����˻���ȫϵͳ������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮�ʹ��������Ե���ϵ��b2����ʱ���½�����ɽ�����˻���ȫ��̬�ݻ�ģ�͵����E1(0��0)Ϊ���ȶ��ֽ��㣻�ҵ�0��a+t0cd-b<<1ʱ(��0��a1+b1m��0/a2-b2<<1)����ζ������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮���Դ��������Ե���ϵ��b2�����E1(0��0)��Χ����Ψһ�ĵ����ȶ���������ͼ3��ʾ��
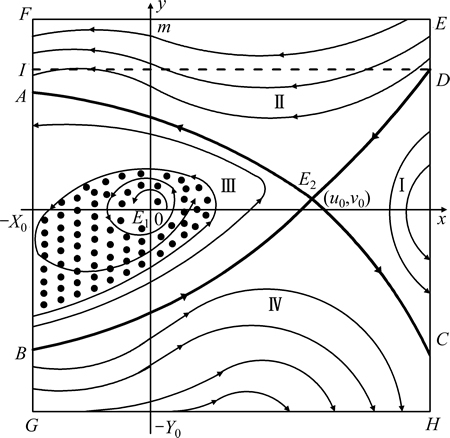
ͼ3 ����Ψһ����������½�����ɽ�����˻���ȫ�����Զ�̬�ݻ�����
Fig. 3 Human-machine safety nonlinear dynamic evolution process of underground metal mining at situation of unique limit cycle
�Ƚ�ͼ2��3��֪��ͼ2��3���������������������ݻ�ģʽ������ͬ���������ȴ���ֳ���ͬ���ݻ�״̬������Ҫԭ��Ϊ��������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮���Դ��������Ե���ϵ��b2ʱ�����½�����ɽ�����˻���ȫϵͳ�İ�ȫˮƽ�����������ܵ���С�̶ȵ����ƣ�������ˮƽ��õ���С�̶ȵ���ǿ���Ӷ����´������ڰ�ȫˮƽ������ˮƽ��С�̶ȵľۼ������������E1(0��0)����������ʽ�������ڵ����ȶ�������������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮�ʹ��������Ե���ϵ��b2ʱ�����½�����ɽ�����˻���ȫϵͳ�İ�ȫˮƽ�����������ܵ�һ�������ƣ�������ˮƽ��õ�һ������ǿ���Ӷ����´������ڰ�ȫˮƽ������ˮƽ�ڵ����ȶ������ⲻ�Ͻ��оۼ��������ڻ��߾ۼ���������
3) �������
�ɵ��½�����ɽ�����˻���ȫ�����Զ�̬�ݻ�ģ�Ϳ�֪����a+t0cd-b��(a+t0c)(ab-cd)/(ab-c)ʱ�� a1+b1m��0/a2-b2��(a1/a2+b1M��0/a22)(a1b2-a2b1m)/(a1b2- a2b1m)�������½�����ɽ�����˻���ȫϵͳ������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮�����Դ��������Ե���ϵ��b2����ʱ���½�����ɽ�����˻���ȫ��̬�ݻ�ģ�ʹ���һ�����ȶ�����E1(0��0)���Ҳ����ڼ�������ͼ4��ʾ��
��ͼ2��3�ȽϿ�֪��ͼ4��ͼ2��3���������������������ݻ�ģʽ��Ȼ������ͬ�������������ֳ���ͬ���ݻ�״̬������Ҫԭ��Ϊ�������½�����ɽ�����˻���ȫϵͳ������ˮƽ����������b1������ˮƽ��ֵm�͵�Чʱ�ͦ�0/a2�ij˻��밲ȫˮƽ����������a1֮�����Դ��������Ե���ϵ��b2ʱ�����½�����ɽ�����˻���ȫϵͳ�İ�ȫˮƽ�����������ܵ��ܴ�̶ȵ����ƣ�������ˮƽ�õ��ܴ�̶ȵ���ǿ���Ӷ����´������ڰ�ȫˮƽ������ˮƽ��С�̶ȵķ�ɢ����(�����E1(0, 0)Ϊ���ȶ�����)������ʱ�����ƣ�����һ���ķ�ɢ�����½�����ɽ�����˻���ȫϵͳ�İ�ȫˮƽ���������ڱ�����
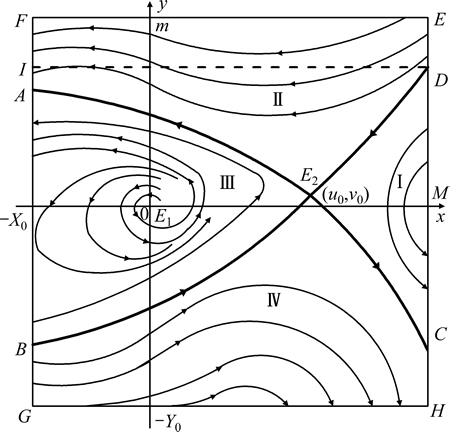
ͼ4 ����������½�����ɽ�����˻���ȫ�����Զ�̬�ݻ�����
Fig. 4 Human-machine safety nonlinear dynamic evolution process of underground metal mining at situation of unlimited cycle
2.4 ���½�����ɽ�����˻���ȫ�����Զ�̬�ݻ����ƶ��Է���
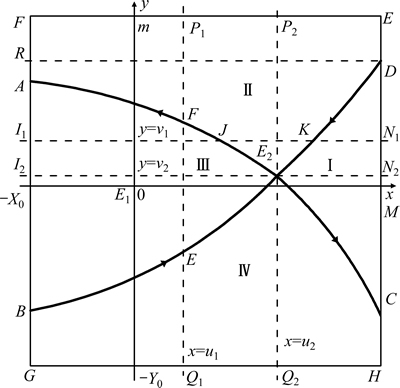
��ͼ5��ʾ��ͨ�����½�����ɽ�����˻���ȫ�����Զ�̬�ݻ���ͼҲ�ɶ��Է��������˻���ȫϵͳ�˻���ȫ�����Զ�̬�ݻ����ơ�
1) ��ȫˮƽȡ��ֵ
�����½�����ɽ�����˻���ȫϵͳ�İ�ȫˮƽΪx=u1ʱ��ͼ5��ֱ��x=u1����ͼ����AC��BD����������E��F����ζ�Ŷ�Ӧ�İ�ȫ��������3�ֿ��ܣ���EF������ȫ������FP1������ȫ������EQ1������ȫ��������������ֱ��x=u1����ƽ��ʱ����ȫ������С����ȫ�����������Ͱ�ȫ���������ӣ���ֱ��x=u1����ƽ��ʱ����ȫ��������ȫ�����������Ͱ�ȫ��������С������ֱ��x=u2ͨ��AC��BD�Ľ���E2(u0��v0)�����Ӧ�İ�ȫ������ֻ��2�ֿ��ܣ���E2P1������ȫ������E2Q1������ȫ������������
���½�����ɽ�����˻���ȫϵͳ��ȫ״̬���ڵ��½�����ɽ�����˻���ȫϵͳ��չ�����ڣ�������ˮƽ�Ķ̶�����DR��֮�£���ֻ��ά���䲻�����ӣ���ȫ����߲���ˮƽ�Ϳ���Ӧ�����������ɽ���ȫ״̬�ع���½�����ɽ�����˻���ȫϵͳ��չ�����ڡ�
ͼ5 ���½�����ɽ�����˻���ȫ�����Զ�̬�ݻ����ƶ��Է���
Fig. 5 Qualitative analysis on nonlinear dynamic evolution trend of human-machine safety in underground metal mining
2) ����ˮƽȡ��ֵ
�����½�����ɽ�����˻���ȫϵͳ������ˮƽΪy=v1ʱ��ͼ5��ֱ��y=v1����ͼ����AC��BD����������J��K����ζ�Ŷ�Ӧ�İ�ȫ��������3�ֿ��ܣ���I1J������ȫ������JK������ȫ������KN1������ȫ��������ֱ��y=v1������ƽ�ƣ�����Ӧ��������֮�仯��������ˮƽ�̶Ƚ���ʱ��ֱ��y=v1ƽ�����ƣ���ȫ������С����ȫ�����Ͱ�ȫ�������ȫ�ԶĿ����Լ�С������ֱ��y=v2ͨ��AC��BD�Ľ���E2(u0, v0)�����Ӧ�İ�ȫ������ֻ��2�ֿ��ܣ���E2I2������ȫ������E2N2������ȫ����
���½�����ɽ�����˻���ȫϵͳ��ȫ״̬���ڵ��½�����ɽ�����˻���ȫϵͳ��չ�����ڣ���ֻ��ά�ֲ���ˮƽ�Ϳ���Ӧ�������������ӣ���ȫ���˷������ԣ���߾����ԣ�ȷ����ȫ״̬�ع鿪���˻���ȫϵͳ��չ�����ڡ�
3 ���½�����ɽ���ɰ�ȫ��̬�ݻ������о�
��ͬ�ĵ��½�����ɽ�����˻���ȫϵͳ��Ӧ��ͬ�IJ�����{a1, a2, b1, b2, m, M}��Ϊ������о�ij���½�����ɽ�����˻���ȫϵͳ�ķ����Զ�̬�ݻ�״̬(x(��)=u, y(��)), ���ȱ���ȷ���õ��½�����ɽ�����˻���ȫϵͳ��Ӧ��ͬ�IJ�����{a1, a2, b1, b2, m, M}��
��x1(��)Ϊ��-���ϵͳ��ȫˮƽ��x2(��)Ϊ��-�ܵ�����װ��ϵͳ��ȫˮƽ��x3(��)Ϊ��-��������װ��ϵͳ��ȫˮƽ��x4(��)Ϊ��-���˻�ϵͳ��ȫˮƽ��x5(��)Ϊ��-Һѹ����̨��ϵͳ��ȫˮƽ��x6(��)Ϊ��-����ϵͳ��ȫˮƽ��x7(��)Ϊ��-֧��ϵͳ��ȫˮƽ��x8(��)Ϊ��-��ʯװ��ϵͳ��ȫˮƽ��x9(��)Ϊ��-װҩ̨��ϵͳ��ȫˮƽ����
 (29)
(29)
ʽ�У���iΪ��ȫˮƽȨ��ϵ����
ͬ������y1(��)Ϊ��-���ϵͳ����ˮƽ��y2(��)Ϊ��-�ܵ�����װ��ϵͳ����ˮƽ��y3(��)Ϊ��-��������װ��ϵͳ����ˮƽ��y4(��)Ϊ��-���˻�ϵͳ����ˮƽ��y5(��)Ϊ��-Һѹ����̨��ϵͳ����ˮƽ��y6(��)Ϊ��-����ϵͳ����ˮƽ��y7(��)Ϊ��-֧��ϵͳ����ˮƽ��y8(��)Ϊ��-��ʯװ��ϵͳ����ˮƽ��y9(��)Ϊ��-װҩ̨��ϵͳ����ˮƽ����
 (30)
(30)
ʽ�У���iΪ��ȫˮƽȨ��ϵ����
��ʱ��Ϊʱ�������ɲ����ʾ������ר�����۵ȷ���ȷ����ʷ�ϵİ�ȫˮƽֵxi(��)��yi(��)�������ò�η�������[18]ȷ����ȫˮƽȨ��ϵ����i�ͦ�i��
��ʱ��Ϊʱ��������ʽ(2)��(3)���в�֣��ɵ�
 (31)
(31)
 (32)
(32)
���õ��ĸ�����ʷˮƽֵ(x(��), y(��))����ʽ(31)��ʽ(32)��������øõ��½�����ɽ�����˻���ȫϵͳ��Ӧ��ͬ�IJ�����{a1��a2��b1��b2��m��M}��
�����Ϸ������ij���½�����ɽ�����˻���ȫϵͳ��Ӧ��ͬ�IJ�����{a1��a2��b1��b2��m��M}={0.20��0.20��0.7��0.4��0.80��1.00}���ɵ�a=a1/a2=1.0��b=b2/a2=2.0��c=b1M/a2=3.5��d=m/M=0.8����Ȼ��2cd��c+ab��cd��ab��������ij���½�����ɽ���� ��ȫ��̬�ݻ�ģ��ƽ��������ΪEl=(0, 0)�� E2=( 0.5333, 0.2489)��
��b=2.0��a=1.0����֪���½�����ɽ�����˻���ȫϵͳ�İ�ȫˮƽ����������a1С�������Ե���ϵ��b2���ʸ��ݶ���3��֪ƽ����ȶ�״̬�������ֿ��ܣ�1) ��t0=(b-a)/cd=1/2.8���Ц�0=t0/a2=1.7857 sʱ����ʱ(0, 0)���ȶ���һ��ϸ���㣻2) ��a+t0cd-b��(a+t0c)(ab-cd)/(ab-c)ʱ(����0��1.9167sʱ)��(0��0)��Χ�����ڼ�����3) ��0��a+t0cd-b<<1(��1.7857 s=t0/a2<��0<<3.5714 s)ʱ������1.7857<<3.5714����������(0, 0)��Χ������Ψһ������4) ��1.9167 s����0��t0/a2=1.7857 sʱ��(0, 0)�Dz��ȶ��ֽ��㡣
4 ����
1) ��������ˮƽ��ȫˮƽ��Ӱ�����ʱ�ͦ�0Ч����������Сʱ��Ӱ���µ��½�����ɽ�����˻�ϵͳ�������밲ȫ�Եķ����Զ�̬�ݻ�ģ�ͣ����Ը��ݻ�ģ�ͽ�������Ч����ѧ�����Ͷ�̬�ݻ����档�о�����Ϻõ���֤����������Сʱ��Ӱ���µ��½�����ɽ�����˻�ϵͳ�����Զ�̬�ݻ�ģ�͵���Ч�ԡ�
2) ��Сʱ��Ӱ���µ��½�����ɽ�����˻���ȫ�����Զ�̬�ݻ��������ƶ��Խ����˷�������ʾ��Сʱ��Ӱ���°�ȫ���������ȫ�������ȫ�����ȶ������Ͱ�ȫ���������������4����̬����������ˮƽ�밲ȫˮƽ��������ݻ�ģʽ����ΪСʱ��Ӱ���µ��½�����ɽ�����˻���ȫϵͳ�İ�ȫ����������ṩ���ݡ�
REFERENCES
[1] �����, ����ȫ. ���½�����ɽ���ɹ����˻�������ȫ�����������ֺ�����Ԥ��[M]. ����: �й�ˮ��ˮ�������, 2014.
ZUO Hong-yan, LUO Zhou-quan. Human machine environment safety mechanism analysis and disaster intelligent prediction in the process of underground metal mine[M]. Beijing: China Water Conservancy and Hydropower Publishing House, 2014.
[2] ZUO Hong-yan, LUO Zhou-quan, GUAN Jia-lin, WANG Yi-wei. Identification on rock and soil parameters for vibration drilling rock in metal mine based on fuzzy least square support vector machine[J]. Journal of Central South University, 2014, 21(3): 1085-1090.
[3] �� ��, ������, �� ��. �˻�ϵͳ�������밲ȫ�Եķ������ݻ��о�[J]. ��ҵ���������, 2008, 13(5): 54-57.
YU Ming, SUN Lin-yan, CUI Kai. Study on nonlinear dynamic evolutionary patterns of vigilance and safety in human-machine system[J]. Industrial Engineering and Management, 2008, 13(5): 54-57.
[4] ������, �� Ʒ, ����³. ����AHP��ģ���ۺ����еĵ��½�����ɽ��ȫ����������[J]. �ƽ��ѧ����, 2015, 23(3): 60-66.
YIN Tu-bing��WANG Pin��ZHANG Ming-lu. Analysis and evaluation of safety in underground metal mine based on AHP and fuzzy evaluation method[J]. Gold Science and Technology, 2015, 23(3): 60-66.
[5] �� ��, ʷ��־, �ŵ���, �Ƹպ�. ����ISM��AHP�Լ�ģ�����еĿ�ɽ��ȫ������������������[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2011, 42(8): 2406-2416.
ZHANG Shu, SHI Xiu-zhi, GU De-sheng, HUANG Gang-hai. Analysis and evaluation of safety management capability in mine based on ISM and AHP and fuzzy evaluation method[J]. Journal of Central South University (Science and Technology), 2011, 42(8): 2406-2416.
[6] ʷ��־, �� ��, �� ��, ������. ���½�����ɽ��ȫ����ϵͳ��Ϣƽ̨�Ĺ�����Ӧ��[J]. ��ȫ�뻷��ѧ��, 2011, 11(1): 184-188.
SHI Xiu-zhi, BAO Rui, ZHANG Shu, ZHAO Yan-yan. Construction and platform based on application of the information safety standardization system for the underground metal mine[J]. Journal of Safety and Environment, 2011, 11(1): 184-188.
[7] ZUO Hong-yan, LUO Zhou-quan, WU Chao. Classification identification of acoustic emission signals from underground metal mine rock by ICIMF classifier[J]. Mathematical Problems in Engineering, 2014, 2014(4): 1-4.
[8] ZUO Hong-yan, LUO Zhou-quan, WU Chao. Research on classification effectiveness of the novel Mamdani fuzzy classifier[J]. Applied Mechanics and Materials, 2014, 511/512: 871-874.
[9] �����, ����ȫ, ����ΰ, ��ˬӢ. ����ģ������Ӧ��Ȩ���㷨�IJɳ�ð��������������Ԥ��[J]. �й���ɫ����ѧ��, 2011, 21(4): 894-900.
ZUO Hong-yan, LUO Zhou-quan, WANG Yi-wei, WANG Shuang-ying. Prediction of functional link neural network of roof caving based on fuzzy adaptive variable weight method[J]. The Chinese Journal of Nonferrous Metals, 2011, 21(4): 894-900.
[10] HU Yu-xi, LI Xi-bing. Bayes discriminant analysis method to identify risky of complicated goaf in mines and its application[J]. Transactions of Nonferrous Metals Society of China, 2012, 22(2): 425-431.
[11] HAN Mao-an. Bifurcations of periodic solutions of delay differential equations[J]. Journal of Differential Equations, 2003, 189(2): 396-411.
[12] WALTHER H O. A periodic solution of a differential equation with state-dependent delay[J]. Journal of Differential Equations, 2008, 244(8): 1910-1945.
[13] WALTHER H O. The solution manifold and C1-smoothness for differential equations with state-dependent delay[J]. Journal of Differential Equations, 2003, 195(1): 46-65.
[14] MALLET-PARET J, NUSSBAUM R D. Superstability and rigorous asymptotics in singularly perturbed state-dependent delay-differential equations[J]. Journal of Differential Equations, 2011, 250(11): 4037-4084.
[15] ʷ��־, ½ ��, �� ��. ������ɽ���¿���ϵͳ�ķ��չ����о�[J]. ��ȫ�뻷������, 2008, 15(1): 108-111.
SHI Xiu-zhi, LU Guang, ZHANG Shu. Study of risk management in underground mining system of metal mines[J]. Safety and Environmental Engineering, 2008, 15(1): 108-111.
[16] ������, ����ȫ, �� Ȼ, ������. ��ȫ�˻�����ѧ[M]. ����: ��е��ҵ������, 2007.
WANG Bao-guo, WANG Xin-quan, HUO Ran, LIU Shu-yan. Safety Ergonomics[M]. Beijing: China Machine Press, 2007.
[17] ������. �ַ���ģ�������[M]. �Ϸ�: �й��Ƽ���ѧ������, 1999.
WANG Shu-he. Differential equation model and chaos[M]. Hefei: University of Science and Technology of China Press, 1999.
[18] ��ˬӢ, �� ��, �����. ��С��ú��������ȫģ����η�������ģ�ͼ���Ӧ��[J]. ���ϴ�ѧѧ��(��Ȼ��ѧ��), 2010, 41(5): 1914-1918.
WANG Shuang-ying, WU Chao, ZUO Hong-Yan. Fuzzy analytic hierarchy process assessment model of safety production for small and medium coal mines and its application[J]. Journal of Central South University (Science and Technology), 2010, 41(5): 1914-1918.
Dynamic evolution mechanism analysis of human-machine safety system with little time delay in underground metal mining
LUO Zhou-quan, ZUO Hong-yan, WANG Wei, WU Chao
(School of Resource and Safety Engineering, Central South University, Changsha 410083, China)
Abstract: Considering the little time delay impact of careless level on the safety level, a nonlinear dynamic evolution model about the careless and safety of the human-machine system with little time delay was built to explore the predisposing factors of frequent personal injury accident in the underground metal mining. And the validity of constructed model was well verified by the simulation results studied in the mathematical analysis and dynamic evolution of the dynamic evolution model. In addition, the qualitative analysis on nonlinear dynamic evolution and trend of safety with little time delay in the underground metal mining not only reveals the interaction evolution model of careless level and safety level in the four dynamic regions, but also provides basis for the safety evaluation and control of the human-machine safety system in the underground metal mining.
Key words: underground metal mining; little time delay; human-machine safety system; dynamic evolution mechanism
Foundation item: Project(2012BAK09B02-05) supported by the National ��Twelfth Five-year�� Science & Technology Support Plan of China; Project(51274250) supported by the National Natural Science Foundation of China
Received date: 2016-05-10; Accepted date: 2016-06-22
Corresponding author: ZUO Hong-yan; Tel: +86-15084931748; E-mail: zuohongyan18@126.com
(�༭ ����)
������Ŀ�����ҡ�ʮ���塱�Ƽ�֧�żƻ�������Ŀ(2012BAK09B02-05)��������Ȼ��ѧ����������Ŀ(51274250)
�ո����ڣ�2016-05-10�������ڣ�2016-06-22
ͨ�����ߣ�����ޣ���ʦ����ʿ���绰��15084931748��E-mail: zuohongyan18@126.com

