基于延时边界观测器的线性Schrodinger方程
输出反馈系统的传递函数
程新功,宗西举
(济南大学 控制科学与工程学院,山东 济南,250022)
摘要:研究一类线性分布参数控制系统带有时间延迟观测器的边界反馈控制下系统的传递函数的性质。首先根据经典控制理论传递函数的定义引出分布参数控制系统的传递函数,并分析分布参数控制系统的传递函数与有理分式型的传递函数的联系与区别;然后,考虑带有时间延迟边界反馈控制的(1+1)维的线性Schrodinger方程的开环传递函数和闭环传递函数;最后考虑(1+1)维的线性Schrodinger方程在时间延迟边界反馈控制的传递函数的性质。
关键词:传递函数;Laplace变换;分布参数控制系统;延迟;稳定性;正规;适定
中图分类号:TP271;O175 文献标志码:A 文章编号:1672-7207(2011)S1-0198-05
Transfer functions of the linear Schrodinger system under output feed-back control by boundary observation with time delay
CHENG Xin-gong, ZONG Xi-ju
(School of Control Science and Engineering, University of Jinan, Jinan 250022, China)
Abstract: The transfer functions of the linear distributed parameter control systems are studied under the boundary conditions with time delay. First, Transfer functions of the linear distributed parameter control systems is derived similar to that of lumped parameter control systems, which plays an important role in representing the relation between input and output and in describing the stability of the system. The open-loop and closed-loop transfer functions for the (1+1)-dimensional linear Schrodinger system under output feedback control by boundary observation with time delay are considered.
Key words: transfer function; Laplace transfer; distributed parameter control system; boundary observation; time delay; stability; proper; well-posed
1 相关理论
传递函数是描述线性定常系数系统的输入-输出关系的数学模型。经典控制理论中,通常用线性定常系数常微分方程描述系统状态的变化发展规律,如RLC电路(见图1),机械阻尼系统(见图2)等。
图1中,电容器两端的电压uc(t)随电源电压u(t)的变化规律可以用以下线性定常系数常微分方程描述:
 (1)
(1)
式中:L为电感;R为电阻;C为电容;uc(t)为电容器两端的电压,u(t)为电源电压;图2中重物的上、下位移x(t)随外力F(t)的变化规律可以用以下线性定常系数常微分方程描述:
 (2)
(2)
式中:M为惯性参数;D为阻尼;K为弹性比例;x为位移。一般地,系统状态变化过程可以用一个高阶线性定常系数常微分方程描述:
 (3)
(3)
其中:n, m, ai(i= 0, 1, 2, …, n), bj (j=0, 1, 2, …, m)为常数;y(t)为系统输出信号;u(t)为系统输入信号。
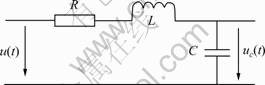
图1 RLC电路图
Fig.1 RLC circuit
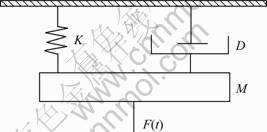
图2 机械阻尼系统
Fig.2 Machine-friction system
假设系统初始条件为0,即
对方程(3)两端取Laplace变换,可以得到线性定常系统的传递函数:
 (4)
(4)
其中: ,
, ,分别是y(t)和u(t)的Laplace变换。众所周知,高阶线性定常系数常微分方程描述的系统传递函数为复变量s的有理函数,系统的稳定性与传递函数的极点是一一对应的,即系统是稳定的等价于传递函数的极点位于复平面的左半平面。
,分别是y(t)和u(t)的Laplace变换。众所周知,高阶线性定常系数常微分方程描述的系统传递函数为复变量s的有理函数,系统的稳定性与传递函数的极点是一一对应的,即系统是稳定的等价于传递函数的极点位于复平面的左半平面。
经典的控制理论中,通常应用线性定常系统的传递函数(4)分析系统的动态性能和静态性能,分析与设计系统的控制器,这些理论都已得到长足的发展[2-5]。然而,许多实际物理系统的状态经常依赖于许多个相互独立的变量,例如,细长杆状物体表面的温度分布通常不仅仅依赖于时间,而且还依赖于杆上测量点的位置即空间变量;在振动过程中,弦的形变也是类似的,人口系统的变化发展也是如此[6-7]。由于多个相互独立的变量存在,描述系统状态变化发展过程中必然会导致对不同变量的偏导数出现,从而就导出了偏微分方程(PDE)。偏微分方程描述的(控制)系统通常也叫做分布参数(控制)系统,与之对应的常微分方程描述的(控制)系统通常也叫做集中参数(控制)系统。与线性定常系数的集中参数控制系统的传递函数一样,线性定常系数的分布参数控制系统输入-输出之间的关系也就构成了分布参数控制系统的传递函数。但是,与线性定常系数集中参数控制系统的传递函数所不同的是:线性定常系数的分布参数控制系统的传递函数是关于s的无理函数[1],而且线性定常系数的分布参数控制系统的传递函数与边界条件密切相关,即在相同的状态方程下,不同的边界条件会导致不同的传递函数。这也是线性定常系数的分布参数控制系统的传递函数所特有的性质。
例如,一长度为L、密度为ρ的细长杆的温度分布可以用以下线性偏微分方程描述[1]:
 (5)
(5)
其中:Cp为温度常数;K0为杆的热传导率。如果保持杆x = 0的一端隔热,即
 (6)
(6)
在x = L的一端给杆施加控制,使杆的x = L端与外界产生热交换,即对系统施加Neumann控制:
 (7)
(7)
选择杆上 (0<x0<L)测量杆的温度,能够得到x0处杆的温度变化函数为
(0<x0<L)测量杆的温度,能够得到x0处杆的温度变化函数为 。
。
假设杆的初始温度为z(, 0) = 0,应用Laplace变换可得:
 (8)
(8)
 (9)
(9)
 (10)
(10)
式(8)的通解为
 (11)
(11)
其中: 。再利用边界条件知:
。再利用边界条件知:
 (12)
(12)
输出函数(即y(t))的Laplace变换为 ,那么,分布参数控制系统(5)~(7)输入-输出之间的关系即传递函数为:
,那么,分布参数控制系统(5)~(7)输入-输出之间的关系即传递函数为:
 (13)
(13)
因此,传递函数 不仅是s的无理函数,也是x0的无理函数。更重要的是,传递函数有无穷多的极点, 即
不仅是s的无理函数,也是x0的无理函数。更重要的是,传递函数有无穷多的极点, 即 的零点,为
的零点,为 ,k=0, 1, 2, …。传递函数
,k=0, 1, 2, …。传递函数 有无穷多的零点,即
有无穷多的零点,即 的零点,为
的零点,为 。其中:k=0, 1, 2, …。
。其中:k=0, 1, 2, …。
如果保持杆x = 0的一端恒温,即z(0, t) = 0。在x = L的一端给杆施加控制,改变杆的x = L端的温度,即对系统施加控制:
(14)
同样选择杆上x = x0点处的测量温度y(t) =z(x0, t)为输出函数。
同理,应用Laplace变换可得:
(15)
 (16)
(16)
(17)
利用边界条件知分布参数控制系统(15)的传递函数为:
 (18)
(18)
传递函数G2(x0, s)有无穷多零点即 的零 点,为,k=0, 1, 2, …;传递函数G(x0, s)有无穷多的极点即的零点,为,k=0, 1, 2, …。通过这个例子可以看
的零 点,为,k=0, 1, 2, …;传递函数G(x0, s)有无穷多的极点即的零点,为,k=0, 1, 2, …。通过这个例子可以看
到:线性定常系数的分布参数控制系统的传递函数随着的边界条件不同而不同,更多的线性定常系数的分布参数控制系统的传递函数见文献[1]。受这个例子的启发,考虑备受关注的基于延时边界观测器的线性Schrodinger方程输出反馈镇定问题的传递函数。
2 基于延时边界观测器的线性Schrodinger方程输出反馈镇定的传递函数
Guo等[8]研究了基于延时边界观测器的线性Schrodinger方程输出反馈镇定问题:


 (19)
(19)
Guo等[8]利用估计和预测相结合的方法设计出基于延时边界观测器的线性Schrodinger方程输出反馈镇定控制器。
更一般地,选取x0(0<x0<1)点处的测量信号y(t)=w(x0, t-τ)为开环系统(19)的经过时间τ延迟的输出信号,为了应用Laplace变换求开环系统的传递函数,不妨假设初始条件ω0=0,开环系统(19)的Laplace变换为:
 ,
, (20)
(20)
 ,
, (21)
(21)
方程(20)和(21)的通解为
 (22)
(22)
再利用边界条件知:
 (23)
(23)
开环系统(20)和(21)的传递函数为:
 (24)
(24)
基于延时边界观测器的线性系统的传递函数不仅与s和x 0有关,同时与时间延迟τ有关。
本文的主要结论如下。
定理1 当 ,x0=1时,即输出反馈没有延迟,且观测点选取右端点x0=1时,开环系统(19)的传递函数有有限的相对阶。
,x0=1时,即输出反馈没有延迟,且观测点选取右端点x0=1时,开环系统(19)的传递函数有有限的相对阶。
定理2 当,0<x0<1时,即输出反馈没有延迟且观测点不选取右端点时,开环系统(19)的传递函数没有有限的相对阶。
定理3 当τ>0,即输出反馈有延迟时,开环系统(19)的传递函数没有有限的相对阶。对任意k>0,反馈控制律u(t)=-iky(t)构成的闭环系统(19)的传递函数没有有限的相对阶。
定理4 当τ>0,即输出反馈有延迟时,开环系统(19)的传递函数是适定的(well-posed)。对任意k>0,反馈控制律u(t)=-iky(t)构成的闭环系统(19)的传递函数是适定的。
定理5 当τ>0,即输出反馈有延迟时,开环系统(19)的传递函数不是正规的(proper)。对任意k>0,反馈控制律u(t)=-iky(t)构成的闭环系统(19)的传递函数不是正规的。
3 定理的证明
开环系统(19)的传递函数为
 (25)
(25)
定理1的证明:当, x0=1时,由式(25)知开环系统(19)的传递函数为
 (26)
(26)
显然,对任意的实数λ,有:

 (27)
(27)
由相对阶的定义[1]知:开环系统(19)的传递函数有有限的相对阶。
推论1 当, x0=1时,对任意k>0,反馈控制律 都可以使系统(19)稳定。
都可以使系统(19)稳定。
推论1的证明:当时,开环系统(19)的传递函数可以改写成以下无穷项部分分式和的形式:
 (28)
(28)
特别地,当x0=1时,
 (29)
(29)
因此,任意k>0,反馈控制律都可以使系统(19)稳定。
定理2的证明:对任意的正实数k都不能使极限 存在,由相对阶的定义,知定理2成立。
存在,由相对阶的定义,知定理2成立。
定理3的证明:对任意的正实数k都有式(30)成立。由相对阶的定义,知定理3成立。
在证明定理4和定理5之前,先给出适定的传递函数和正规的传递函数的定义。
适定的传递函数:存在某个实数γ,如果传递函数G(s)在区域{s C|Res>γ}上是一致有界的,则称传递函数G(s)是适定的。
C|Res>γ}上是一致有界的,则称传递函数G(s)是适定的。
正规的传递函数:存在某个足够大的实数ρ,如果传递函数G(s)满足
 (30)
(30)
则称传递函数G(s)是正规的。如果 ,则称传递函数G(s)是严格正规的。
,则称传递函数G(s)是严格正规的。
定理4的证明:对任意的正实数γ,Res>g,都有
 (31)
(31)
即开环系统传递函数Gc(s)是适定的。
闭环系统传递函数:

 (32)
(32)
即闭环系统传递函数Gc(s)是适定的。
定理5的证明:由开环系统的传递函数,取

 (33)
(33)
即 ,所以,的传递函数G(s)不是正规的。当τ>0时,任意k>0,由反馈控制律u(t) =-iky(t)构成的闭环系统(19)的传递函数为
,所以,的传递函数G(s)不是正规的。当τ>0时,任意k>0,由反馈控制律u(t) =-iky(t)构成的闭环系统(19)的传递函数为
 (34)
(34)
所以,闭环系统传递函数的特征方程为:
 (35)
(35)
当0<x0<1为有理点时,x0可以表示成x0 =M/N。其中:M<N;M和N是自然数。令 代入式(35)得:
代入式(35)得:

 (36)
(36)
考虑区间 , n =0,_1,_2, …
, n =0,_1,_2, …
 <0,
<0,  >0
>0
由于 关于
关于 是连续的,所以,在每一个区间In内至少存在一个
是连续的,所以,在每一个区间In内至少存在一个 使得
使得 。当x0为有理点时,由实数的稠密性和关于的连续性,也可得类似的结果。所以,存在无穷多个使得闭环传递函数:
。当x0为有理点时,由实数的稠密性和关于的连续性,也可得类似的结果。所以,存在无穷多个使得闭环传递函数:
 (37)
(37)
即。所以,闭环系统的传递函数G(s)不是正规的。
推论2 当τ>0,x0 =1,即输出反馈有延迟时,任意k>0,反馈控制律u(t)=-iky(t)都不能使闭环系统(19)渐近稳定。
推论2的证明:当τ>0,x0 =1时,任意k>0,反馈控制律u(t)=-iky(t)构成的闭环系统(19)的传递函数为:
 (38)
(38)
所以,闭环系统传递函数的特征方程为:
 (39)
(39)
令,代入式(39)得:

 (40)
(40)
同样的,考虑区间,n = 0, 1, 2, …,
<0,>0
由于关于是连续的,所以,在每一个区间In内至少存在1个 使得,即闭环系统(19)特征方程有无穷多个纯虚特征根,反馈控制律u(t)=-iky(t)都不能使闭环系统(19)渐近稳定。
使得,即闭环系统(19)特征方程有无穷多个纯虚特征根,反馈控制律u(t)=-iky(t)都不能使闭环系统(19)渐近稳定。
参考文献:
[1] Curtain R, Morris K. Transfer functions of distributed parameter systems: A tutorial[J]. Automatica, 2009, 45(5): 1101-1116.
[2] 郑大钟. 线性系统理论[M]. 北京: 清华大学出版社, 2002.
ZHENG Da-zhong. Linear system theorem[M]. Beijing: Tsinghua Press, 2002.
[3] 李友善. 自动控制原理[M]. 3版. 北京: 国防工业出版社, 2008.
LI You-shan. Automatic control theorem[M]. 3rd ed. Beijing: National Defence Industry Press, 2008.
[4] 程鹏. 自动控制原理[M]. 北京: 高等教育出版社, 2003.
CHENG Peng. Automatic control theorem[M]. Beijing: National Advanced Education Press, 2003.
[5] 胡寿松. 自动控制原理[M]. 4版. 北京: 科学出版社, 2001.
HU Shou-song. Automatic control theorem[M]. 4th ed. Beijing: Science Press, 2001.
[6] 宋健, 于景元. 人口控制论[M]. 北京: 科学出版社, 1985.
SONG Jian, YU Jing-yuan. Popullation control theorem[M]. Beijing: Science Press, 1985.
[7] 宋健. 人口预测与人口控制[M]. 北京: 人民出版社, 1982.
LI You-shan. Automatic control theorem[M]. 3rd ed. Beijing: National Defence Industry Press, 1982.
[8] Guo B Z, Yang K Y, Output feedback stabilization of a one dimensional Schrodinger equation by boundary observation with time delay[J]. IEEE Transactions on Automatic Control, 2010, 55(5): 1226-1232.
(编辑 陈灿华)
收稿日期:2011-04-15;修回日期:2011-06-15
基金项目:国家自然科学基金资助项目(11026112).
通信作者:宗西举(1981-),男,山东滕州人,博士,副教授,从事非线性控制理论、分布参数控制系统、电网无功优化研究;电话:86-53189736515;E-mail: cse zongxj@ujn.edu.cn.

