Real-time accurate hand path tracking and joint trajectory planning for industrial robots(Ⅰ)
来源期刊:中南大学学报(英文版)2002年第3期
论文作者:谭冠政 梁丰 王越超
文章页码:191 - 196
Key words:industrial robots; real-time; accurate; hand path tracking; joint trajectory planning; extra knot
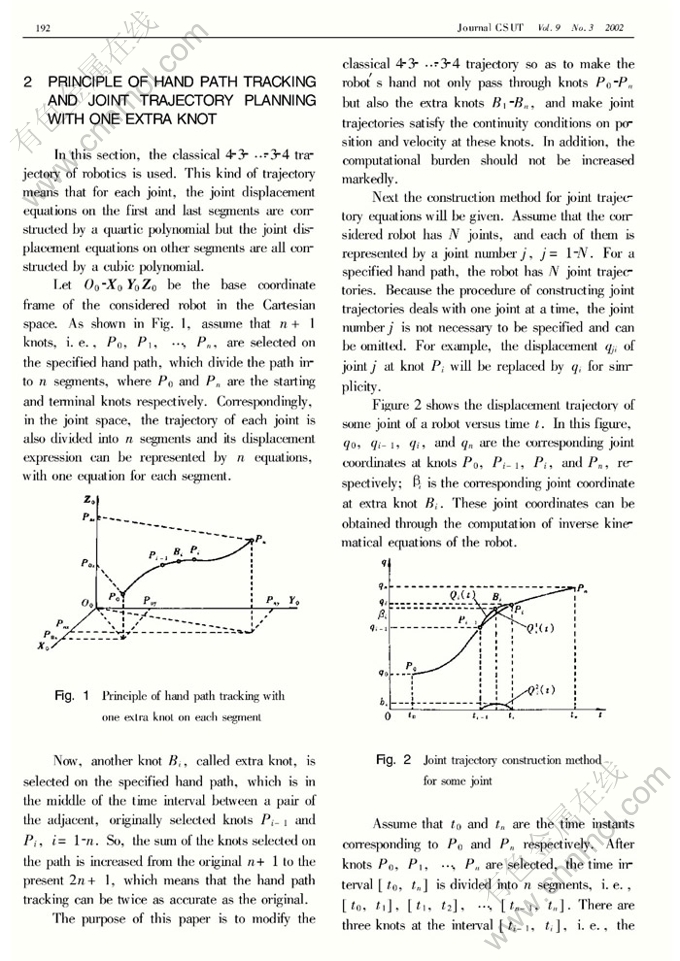
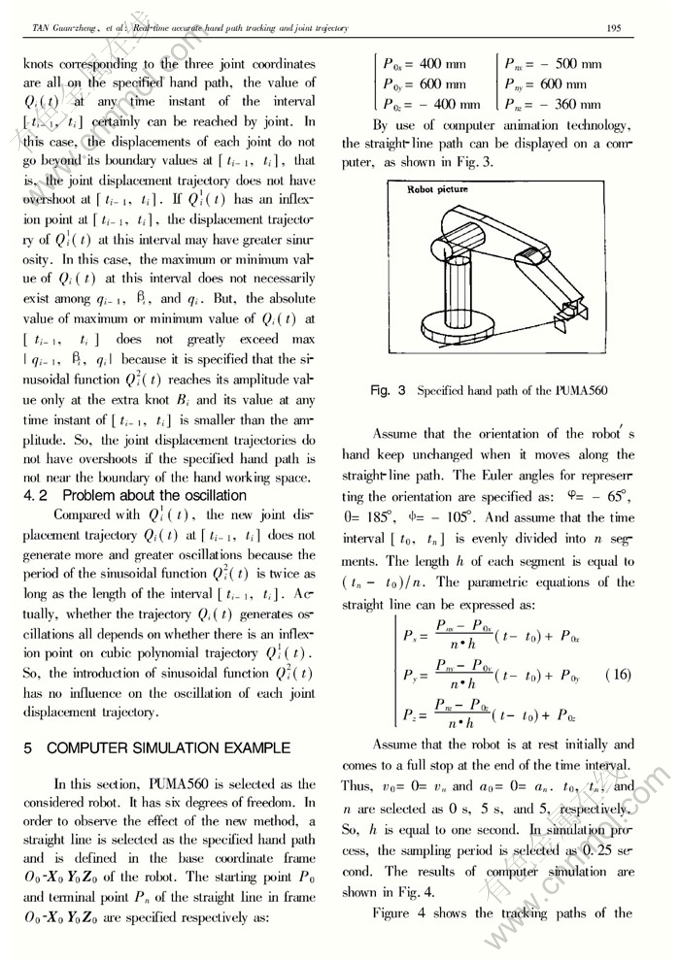
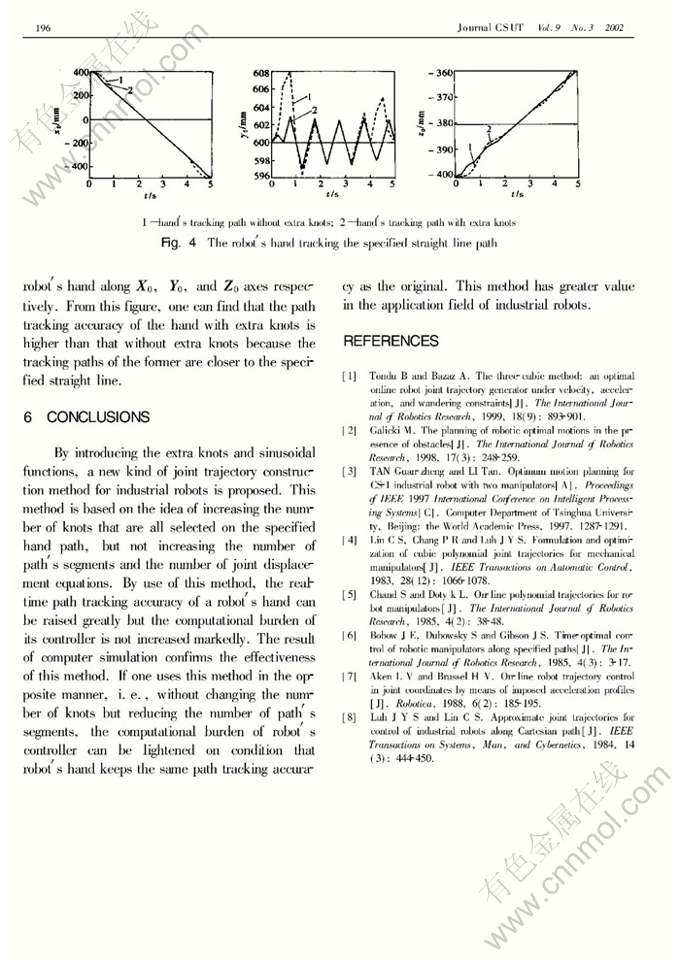
Abstract: Previously, researchers raised the accuracy for a robot′s hand to track a specified path in Cartesian space mainly through increasing the number of knots on the path and the number of the path′s segments ,which results in the heavier online computational burden for the robot controller. Aiming at overcoming this drawback, the authors propose a new kind of real-time accurate hand path tracking and joint trajectory planning method. Through selecting some extra knots on the specified hand path by a certain rule and introducing a sinusoidal function to the joint displacement equation of each segment, this method can greatly raise the path tracking accuracy of robot′s hand and does not change the number of the path′s segments. It also does not increase markedly the computational burden of robot controller. The result of simulation indicates that this method is very effective, and has important value in increasing the application of industrial robots.