一种多变量电液伺服系统的解耦控制①
来源期刊:中国有色金属学报1996年第1期
论文作者:罗安
文章页码:140 - 144
关键词:电液伺服; 多变量系统; 解耦控制; 极点配置
Key words:electric-hydraulic servo control; mufti-variable system; decoupling control ; pole displacement
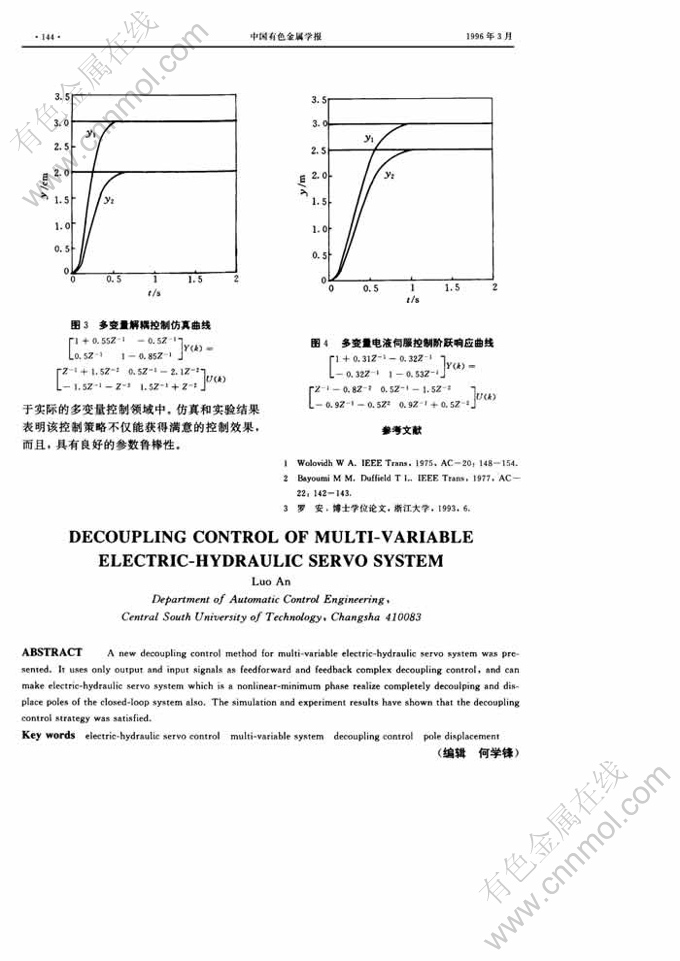
摘 要:提出了一种多变量电液伺服系统的解耦控制方法,该方法仅采用输出、输入信号构成前馈-反馈复合解耦控制,能使电液伺服这类线性最小相位系统实现完全解耦,并且,可配置闭环系统极点。仿真和实验结果表明,该解耦控制策略能获得满意的控制效果。
Abstract: A new decoupling control method for mufti-variable electric-hydraulic servo system was pre-make electric-hydraulic servo system which is a nonlinear-minimum phase realize completely decoulping and dis-place poles of the closed-loop system also. The simulation and experiment results have shown that the decoupling control stategy was satisfied.